Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Woodward effect wikipedia , lookup
Neutron magnetic moment wikipedia , lookup
Electromagnetism wikipedia , lookup
Lorentz force wikipedia , lookup
Introduction to gauge theory wikipedia , lookup
Magnetic monopole wikipedia , lookup
Condensed matter physics wikipedia , lookup
Electromagnet wikipedia , lookup
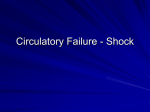
Transmitted and reflected electrons and the collisionless shock front Thesis submitted in partial fulfillment of the requirement for the degree of master of science in the Faculty of Natural Sciences Submitted by: Alex Rozenberg Advisor: Prof. Michael Gedalin Department of Physics Faculty of Natural Sciences Ben-Gurion University of the Negev January 14, 2007 Abstract Electron heating and acceleration are the central problems of astrophysical shock physics since shock energized electrons are believed to be responsible for the electromagnetic emission from supernova remnants, gamma ray bursts, relativistic jets and others. This emission is the only evidence of the shock presence in these objects and the only available information we can use to study physical processes there. In situ observations of high Mach number heliospheric shocks have shown that the electron heating by far exceeds what would be expected from adiabatic heating based on the magnetic moment conservation. Observations of emission from the very high Mach number supernova shocks show that efficiency of electron energization should be extremely high: electrons should acquire up to 10% of the incident ion energy. It is proposed that such high efficiency may be achieved in thin shocks due to the nonadiabatic heating in an inhomogeneous cross-shock electric field. In this work we analyse numerically the dynamics of electrons as they cross the front of a high Mach number quasiperpendicular shock. Detailed analysis of the downstream electron distribution as a function of the shock width, the angle between the shock normal and the upstream magnetic field, and the cross-shock potential is carried out. The crossover from the adiabatic dynamics to the nonadiabatic behavior is studied in detail. Influence of the shock structure on electron reflection at the shock front is also analyzed. Downstream energies of nonadiabatically heated electrons are as high as a half of the cross-shock potential, which is in turn of the order of the energy of an incident ion, so that the heating is very efficient. The power of X-ray emission from heated electrons is estimated for supernova shocks and is found to be consistent with observations. 2 Contents 1 Scientific background 5 1.1 General Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 1.2 Shock Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 1.2.1 Rankine-Hugoniot equations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 1.2.2 Coplanarity theorem and shock normal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 1.2.3 Local geometry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 1.2.4 Shock speed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 1.2.5 Shock rest frames . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 Observed structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 1.3.1 Observational Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 1.3.2 Low Mach Shocks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 1.3.3 High Mach Shocks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 1.3 2 Theory and observations 17 2.1 Magnetic Mirror . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 2.2 Heating Mechanism . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 2.2.1 Adiabatic Heating . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 2.2.2 Nonadiabatic Heating . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 Observed Electron Distribution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 2.3 3 Numerical analysis 3.1 25 Theoretical expectations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26 3.1.1 Ramp width and cross shock potential. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26 3.1.2 Angle between the shock normal and the upstream magnetic field . . . . . . . . . . . . . . . 26 3 3.1.3 Noncoplanar component of the magnetic field . . . . . . . . . . . . . . . . . . . . . . . . . . 27 3.2 Parameters for numerical analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 3.3 Numerical results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31 3.3.1 Effects of ramp width and cross-shock potential . . . . . . . . . . . . . . . . . . . . . . . . . 31 3.3.2 Effects of the angle between the shock normal and the upstream magnetic field . . . . . . . . 49 3.3.3 Effects of the noncoplanar component of the magnetic field . . . . . . . . . . . . . . . . . . . 52 4 Emitted Radiation 55 4.1 Nonrelaivistic case . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55 4.2 Relativistic case . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57 5 Conclusions 59 4 Chapter 1 Scientific background 1.1 General Introduction Collisionless shocks are one of the fundamental phenomena in plasmas in general and in space plasmas in particular. They play important role in many astrophysical systems. They form when the solar wind encounters planetary magnetosphere (planetary bow shocks), when the solar wind interacts with the interstellar medium (termination shock and heliospheric shock), as a result of the supernova explosion etc. The main task of a shock is to convert the energy of directed flow in to energy of heated and accelerated charged particles. Electron heating and acceleration is one of the most important problems of collisionless shock physics because of the following reasons. In some cases it is the only direct indication of the shock presence but it also plays important role in incoming bulk plasma flow energy redistribution. Electrons dynamics depend significantly on the details of the shock structure, thus measuring the electron distribution provide us with information c and times ≈ Ω−1 about what happens in the shock at typical electron scales ≈ e . ωpe In the MHD approximation a shock is a discontinuity separating two different regions in an otherwise continuous medium. It is associated with flows faster than the signal speed in the medium: a shock front separates the Mach cone of a supersonic jet from the ambient, undisturbed 5 air. Here the disturbance and the shock are moving, and thus the shock is called traveling shock. Standing shocks also form: in a river, a shock forms in front of a bridge pier where the fast stream suddenly is slowed down. In space plasmas, both kinds of shock exist: mass ejections propagating from the Sun through interplanetary space drive traveling shocks. The super(magneto)sonic solar wind is slowed down at planetary magnetosphere, forming the bow shock, a standing shock wave. In a gas dynamic shock, the important process is the collisions between molecules: they establish a temperature distribution, temperatures of different species are equalized, density and temperature fluctuations can propagate, and the viscous forces associated with them lead to dissipation. Space plasmas are rarefied, and here collisions are rare. These shocks are called collisionless shocks. The lack of collisions has some implications, for instance: electrons and protons can have different temperatures, their distributions can be very different from a Maxwellian making the classical concept of temperature obsolete, the presence of a magnetic field might even lead to highly anisotropic particle distributions, and processes of dissipation involve complex interactions between particles and fields. While the coupling between the particles due to collisions in negligible, the magnetic field acts as a coupling device, binding the particles together. 1.2 Shock Structure 1.2.1 Rankine-Hugoniot equations. Within the MHD description a shock is a discontinuity through which a plasma flows. Plasma properties in the upstream and the downstream media are different in parameters such as bulk flow speed V , magnetic field B, plasma density ρ and pressure p. The relationship between these two sets of parameters is established by basic conservation laws, the Rankine-Hugoniot equations. Here we assume that the shock front is thin with respect to the scale length of the fluid, ion gyroradius. Mass balance [ρV · n] = 0 (1.1) 6 Momentum balance B2 (B · n) B ρV · (V · n) + p + ·n− =0 2μ0 μ0 Energy balance γ B2 ρV (B · n) · (B · V) + p+ − =0 V·n· 2 γ−1 μ0 μ0 (1.2) (1.3) Maxwell’s equations, the continuity of the normal and the tangential components of the magnetic fields [B · n] = 0 (1.4) [n × (n × B)] = 0 (1.5) Cp . The Rankine-Hugoniot equations are a set of five Cv equations for the unknown quantities ρ, V, p, B n and Bt . where [X] = Xu − Xd and γ = 1.2.2 Coplanarity theorem and shock normal The coplanarity theorem states that it is always possible to choose a frame such that the shock normal and the magnetic field directions in the upstream and the downstream media all lie in the same plane. This is a consequence of the jump conditions at the shock. It can be expressed as n · (Bd × Bu ) = 0 (1.6) If we only consider the transverse component, the momentum balance for an isotropic pressure p can be written as Bn Bt = 0 ρVn Vt − 2μ0 (1.7) Continuity of tangential magnetic field component can be written as [Vu Bt − Bn Vt ] = 0 (1.8) 7 Therefore both [Bt ] and [Vn Bt ] are parallel to [ut ] and thus also parallel to each other. Then we have [Vn Bt ] × [Vn Bt ] = 0. Resolving the parentheses gives (Vn,u − Vn,d ) (Bt,u × Bt,d ) = 0 (1.9) Since [Vn ] does not vanish, the upstream and downstream tangential magnetic components must be parallel to each other. Thus the upstream and downstream magnetic field vectors are coplanar with shock normal vector and the magnetic field across the shock has a two dimensional geometry. The bulk velocity is coplanar with the shock, too. An application of the coplanarity theorem is the calculation of the shock normal in observational data. If the shock normal is known, the angle θ Bn , which is crucial for shock formation and particle acceleration, can be calculated. If only the magnetic field measurements are available, the coplanarity theorem for the magnetic field can be used. Since the magnetic field is divergenceless, we have (Bu − Bd · n) = 0. Thus together with eq.(1.6) we have defined two vectors perpendicular to the shock normal. Those vectors can be used to calculate the shock normal n= (Bu × Bd ) × (Bu − Bd ) |Bu × Bd ) × (Bu − Bd | (1.10) This method does not work if B u is parallel to Bd . The shock normal derived according to eq.(1.10) is called the coplanarity normal. With the known shock normal we are also able to determine the shock speed vs Vs = ρd Vd − ρu Vu ·n ρd − ρu (1.11) 1.2.3 Local geometry One important parameter in the description of a MHD shock is the local geometry, i.e. the angle θBn between the magnetic field direction and the shock normal. Shocks can be classified according to θBn • Perpendicular shock propagates perpendicular to the magnetic field, θBn = 90◦ . 8 • Parallel shock propagates parallel to the magnetic field, θBn = 0◦ . • Oblique shock propagates at any θBn between 0◦ and 90◦ . Oblique shocks can be subdivided into – Quasi-parallel shocks with 0◦ < θBn < 45◦ . – Quasi-perpendicular shocks with 45◦ < θBn < 90◦ . 1.2.4 Shock speed In a plasma, different modes of MHD waves exist which can steepen to form a shock: fast, slow and intermediate waves. Of these waves only the fast and the slow are compressive. The intermediate wave is purely transverse with the velocity perturbation perpendicular to both k 0 and B0 . The intermediate shock, called an Alfven shock, only exists in an anisotropic medium. In an isotropic plasma, such as the solar wind, it is not a shock but a rotational discontinuity: there is a rotation of the magnetic field by 180◦ in the plane of the shock but no density jump across the shock. Thus there is a flow across the boundary, but without compression or dissipation. In an intermediate shock the propagation speed parallel to the magnetic field equals the Alfven speed, i.e. V int = VA cos(θBn ). Real shocks are formed by fast and slow magnetosonic waves only. In both modes, the plasma density and pressure change across the shock. The phase speed of these modes is 2 2 2 (Vs + VA ) ± (Vs2 + VA2 ) − 4Vs2 VA2 cos2 (θBn ) 2 (1.12) Vf ast,slow = 2 with the + sign referring to the fast and the − sign to the slow mode, V A is the Alfven mach number and Vs is the shock speed. The change in the magnetic field is different in fast and slow shocks: in a fast shock the magnetic field increases and is bent away from shock normal because the normal component of the field is constant. The normal component of the upstream (downstream) flow is larger (smaller) that the propagation speed of the fast MHD wave and both upstream and 9 downstream flow speeds exceed the Alfven speed. In a slow shock, the upstream speed exceeds the sound speed but not the Alfven speed. In addition the magnetic field strength decreases across the shock and the field therefore is bent toward the shock normal. Traveling interplanetary shocks in general and planetary bow shocks in particular are fast MHD shocks. 1.2.5 Shock rest frames When dealing with shocks it is convenient to work in the shock rest frame, which means that the shock is at rest and plasma flows with a high speed V u from the upstream medium into the shock front and leaves it with a lower speed Vd into the downstream medium. The upstream side is the low entropy side while the downstream side is the high entropy side. There are two suitable rest frames, the normal incidence frame(NIF) and the de Hoffman-Teller frame(HTF)(1). Let our starting point be the assumption that the shock is stationary, one dimensional and the ramp width is between the ion and electron typical scales. Let us choose the shock normal along the x axis and the coplanarity plane be the xz plane. NIF is defined by the condition that the upstream fluid velocity is along the shock normal only so, Vu = (Vu , 0, 0), thus oblique to the magnetic field. The downstream flow is oblique to both the magnetic field and shock normal. Let us choose the upstream constant magnetic field in the form of B = (cos(θ), 0, sin(θ)), where θ is the angle between the shock normal and the upstream magnetic field. Also we assume that the E x and By components are zero outside the ramp, while the Bz component vary inside the ramp only. The electromagnetic structure of the shock can be written as B = (Bu cos(θ), By (x), Bz (x)), E = (Ex (x), Ey = (1.13) Vu Bu sin(θ) , 0). c (1.14) 10 Note that in this frame we have two components of the electric field, one is constant, E y , and the second is varying, Ex (x). HTF is defined by the condition that the upstream and downstream fluid velocity is along the magnetic field and the V × B induction field in the shock front vanishes. This condition implies that the HTF moves relatively to the NIF in the z direction with shift velocity V sh = −Vu tan(θ). The nonrelativistic transformation of the fields between the frames gives ExHT F = ExN IF + Vu By tan(θ) , c (1.15) EyHT F = 0. (1.16) while B does not change. Since ϕ = ϕ(x) only each electron passing the chock gains the same energy eϕHT F . Figure 1.1: (a) Normal incidence frame geometry with components of the magnetic and electrical fields. Note that Vu , Vd , Bu = B1 , Bd = B2 are in the coplanarity plane and that the electric field has two components, a constant component E y and a varying component Ex . Also note the shift E velocity VHT in −ẑ direction. 11 1.3 Observed structure At this point we turn our attention to the shock internal structure in terms of the electric and magnetic fields. First we will define the following relations: M ms = Vu /Vms , the magnetosonic mach number defined as the ratio of the solar wing velocity divided by magnetosonic wave propagation speed, Mc , first critical mach number defined as upstream mach number at which the downstream flow speed along the shock normal is equal to the downstream sound speed for a specific β and θ 8πnKb T and finally β, solar wind thermal pressure divided by the magnetic pressure β = . StanB2 dard description of the shock waves assumes that the upstream and downstream magnetic fields lie in the coplanarity plane, therefore we assume that the components of the magnetic field out of the coplanarity plane is not zero only inside the shock. Similar picture can be seen with the electric field. The electric field component perpendicular to the shock normal remains constant throughout the shock. It is this electric field which causes the plasma drift into the shock. The component of the electric field along the normal is not zero only inside the shock, it decelerates ions and accelerates electrons. First we will look at the overall shock magnetic structure as a function of increasing mach number. In what follows we choose x along the shock normal, while y is taken as the non-coplanarity direction. As the ratio of criticality raises, we notice the development of he shock overshoot and an enhancement in the downstream wave activity. Large amplitude, low frequency whistler mode waves are apparent upstream at low ratios of criticality, diminishing in amplitude and extent in front of the shock as the ratio increases. As the ratio of criticality exceeds unity, a foot develops in front of the shock indicating ion reflection(2). Now we will discuss each type of shock individually. M < 1, the magnetic field strength gradually rises in the shock In subcritical shocks, Mms ramp and asymptotes to the average downstream field strength without any overshoot whatsoever, laminar transition. Upstream of the shock we see a large amplitude, low frequency whistler wave. This wave has components in y and z directions only. We also notice the existence of the noncoplanar component of the magnetic field. It’s thickness is equal to the thickness of the shock. 12 Figure 1.2: Total magnetic field strength for quasi perpendicular shocks in order of increasing ratio of criticality. M ≈ 1, we note the development of the overshoot beyond the Mms shock ramp. Upstream whistler wave has decreased in amplitude and extent of the wave is much In marginally critical shocks, reduced. The noncoplanar component of the magnetic field width is still equal to the width of the M > 1, the upstream whistler has completely disappeared, being shock. In supercritical shocks, Mms replaced by the foot which is indicative of reflected ions. The overshoot is clearly evident, as well as enhanced downstream wave activity. The extent of the noncoplanar component of the magnetic field is again consistent with the thickness of the shock. 13 1.3.1 Observational Data Now we present the observed fields strength of shocks. First we look at the parameters common to all shocks and later discuss the difference between low and high mach shocks. The magnetic comBd pression ratio, ( , ratio between the upstream and downstream magnetic field strength) varies Bu according to observations between 2 and 6. Higher compression rates exist but they are less frequent. Upstream total field strength at the Earth bow shock varies between 15nT and 35nT , while the downstream total field strength is usually between 40nT and 100nT (2; 8). To discuss the strengths of noncoplanar component of the magnetic field, B y , and the electric field parallel to the shock normal, Ex , we note that both those fields strength inside a shocks usually taken to be ∂Bz , where x is the normalized length. roughly proportional to the first derivative of the B z , ∝ ∂x 1.3.2 Low Mach Shocks Shocks are created from steepening of perturbations in interstellar plasma. Those perturbation will continue to steepen until some mechanism will provide the dissipation needed to stop the steepening thus creating the shockwave. In low mach shocks the role of the dissipation may be partially assumed by dispersion(3; 4). Long wavelength perturbations in plasmas will steepen until the gradient reaches the scale length k0 at which the medium becomes dispersive. Waves with wave numbers k greater than k0 will travel with different phase velocities and further steepening will be prevented by the formation of a leading or trailing wave train. A scale length is thus introduced which is equal to the wavelength of that wave which is just phase stand with respect to the shock front. The shape of dispersion relation determines the shock structure. In the case of the low mach quasiperpendicular shocks the frequency increasing with increasing wave number, creating precursor wave trains. The structure of the shock in this case is that of large amplitude whistler mode wave which grows in amplitude to a point where is an irreversible transition to relatively steady downstream conditions. That particular whistler whose phase speed and direction match the velocity of the shock extends upstream in the form of a precursor wave train. The scale length 14 of the shock and equivalently the wavelengths of the precursors can be calculated by solving the whistler dispersion relation for those waves which would phase stand in the plasma flow, thus for low mach quasi perpendicular shocks this leads to the equation for the wavelength, and for the shock width λ = 2π c cos(θ) √ ωpi M 2 − 1 (1.17) c is the ion inertial length, θ is the angle between the shock normal and the upstream ωpi magnetic field and M is the Alfven mach number. Low mach quasi perpendicular shocks have a where wide ramp in range of 0.5 to about 0.3 ion inertial lengths(5; 6), based on a equation above, thus from the definition of the Ex and By above we see that the gradient of those fields inside the ramp mV mV to 10 (9) in the ramp and is small. The maximum E x reaches the strength of about 5 m m Bd Bd to (2). Bx component of the magnetic field theoretically is taken to By strength is about 5 10 be constant everywhere. In observations we see good confirmation to this assumptions and the strength of Bx is in range of 10nT to 20nT depending on shock. Another important data is the amount of energy, eΔϕ , gained by the electrons while they cross the shock and normalized by units of the upstream ion energy, 0.5mi V 2 . In general observations showed increase in energy 1 , so in low mach shocks we observe as much as 0.5 of transfer to electrons as a function of M initial energy lost to the electrons(11). 1.3.3 High Mach Shocks In high mach shocks the ramp width becomes very thin, in order of 0.3 ion inertial lengths to 0.02 ion inertial lengths in almost perpendicular very high mach shocks(7; 27). Under those conditions Bd the gradient of the Bz in the ramp becomes large, increasing the strength of B y to about and 3 mV (10; 27). The strength of of Ex . Observed strength of Ex in those shocks can be as large as 70 m the Bx component remains roughly the same strength as for low mach shocks. The supercritical 15 quasi-perpendicular shocks have mostly a well defined structure including foot, ramp, overshoots and undershoots. The ramp defines the transition from the upstream to downstream region and is characterized by a sharp increase in magnetic field. It is preceded by the foot: a longer region of a slow and small increase of the magnitude of magnetic field. The ramp is followed by the overshoot (undershoot) regions where the magnitude of the magnetic field larger (smaller) than that far downstream. In supercitical shocks the proton reflection becomes the most important dissipation mechanism. The combination of the cross-shock potential and the magnetic mirror force leads to the reflection of a portion of incident protons. This ion reflection forms the shock precursor region, the so-called foot region. The particles gyromotion during the reflection also affect on the magnetic field structure, and contributes to the formation of the magnetic overshoot structure. 16 Chapter 2 Electron dynamics in the shock front theory and observations 2.1 Magnetic Mirror In order to better understand the electron heating in shocks we first have to examine the particle motion in the presence of magnetic field in general and the magnetic mirror process in particular(19). Let us look at the situation at which we observe a charged particle moving in direction of increasing magnetic field. This particle has two velocity components, parallel and perpendicular to the local mV⊥2 magnetic field. First we define the magnetic moment of the gyrating particle to be μ ≡ . Thus B the force acting on a particle moving in increasing magnetic field can be written as F = −μ · ∇B. This force has a direction opposite to the particle initial parallel velocity direction so if the gradient of the magnetic filed is positive the force will try to stop the particle. Now we will apply the concept of adiabatic invariants to demonstrate the magnetic mirror property. The first adiabatic invariant states that in a slowly varying magnetic field, field changes slowly during a gyration of a particle, the magnetic moment is almost constant. Let us assume for simplicity that the electric field is zero so particle has constant kinetic energy. We can write the kinetic energy of a particle as 17 mV||2 mV 2 = + μB 2 2 (2.1) Here we expressed the perpendicular kinetic energy by the magnetic moment. Since the magnetic moment is invariant, an increase in magnetic field has to be compensated for by the decrease in the parallel kinetic energy until V|| becomes zero. At the mirror point the energy conservation yields μB = mV 2 2 (2.2) Thus, at the mirror point the parallel energy is entirely transformed into gyration energy, which therefore is the particle’s kinetic energy. The particle is stopped and eventually will be reflected back toward the diverging field. The location of the mirror point depends on the initial pitch angle, θ, of a particle, the angle between the magnetic field direction and the particle parallel speed direction. If θ is zero, the magnetic moment is zero, too, and the particle energy comes only from the parallel speed. An increase of the magnetic field does not transform parallel speed into perpendicular speed and the particle can pass thrue the magnetic mirror. Now let us determine if the particle will be reflected or transmitted. The constancy of the magnetic moment implies that the ratio of gyration and the magnetic field strength is constant. Thus for any two points in the magnetic field we have μ= 2 2 mV⊥2 mV⊥1 = 2B1 2B2 (2.3) or, taking the pitch angle into consideration, V12 sin2 (θ1 ) V 2 sin2 (θ2 ) = 2 B1 B2 (2.4) 18 The kinetic energy is constant; thus it is V 1 = V2 and sin2 (θ1 ) sin2 (θ2 ) 2μ = = mV 2 B1 B2 (2.5) becomes an invariant of motion. At the mirror point, the particle’s pitch angle is 90 ◦ thus reflection requires an initial pitch angle of sin2 (θ1 ) = B1 B2 (2.6) Particles with larger θ are reflected and particles with smaller θ pass through the mirror point. Thus eq(2.6) defines the boundary of a region in velocity space in the shape of a cone, called the loss cone. Particles inside the cone are not confined by the magnetic mirror. Note that the loss cone depends on pitch angle only(12). Finally we present the equations for velocity of the reflected particles. We remember that HTF moves relative to NIF with speed of Vu tan(θ). So when we transform initial speeds of the electron from NIF to HTF we get: Vx = Vx ,Vy = Vy and Vz = Vz − Vu tan(θ). Here primes velocities are in HTF and unprimed are in NIF. From now we work in HTF and therefore will drop all primes. Now we can write the initial parallel and perpendicular velocities of the reflected electron in HTF. V||i = Vx cos(θ) + (Vz − Vu tan(θ)) sin(θ) (2.7) V⊥i = Vx sin(θ) + (Vz − Vu tan(θ)) cos(θ) (2.8) In reflection process perpendicular speed remains constant and parallel speed simply changes the direction, so V||f = −V||i and V⊥f = V⊥i . Now we return back to Vx , Vy , Vz . Vy remains unchanged so Vyf = Vyi and 19 Vxf = V||f cos(θ) + V⊥f sin(θ) (2.9) Vzf = V||f sin(θ) − V⊥f cos(θ) (2.10) f f f f f f Finally back to NIF we get Vx,N IF = Vx,HT F , Vy,N IF = Vy,HT F and Vz,N IF = Vz,HT F + Vu tan(θ). 2.2 Heating Mechanism Now we can turn our attention to the problem of electron heating in the shock. Cross shock electric field strongly affects the electron heating process. As we saw above adiabatic moment conservation can be the primary mechanism for electron heating in the shock, but it requires certain conditions like slowly varying field. We will discuss the validity of those conditions in the shocks and consider alternative heating mechanism in shocks where these conditions doesn’t stand. In discussion below we assume that the electrons transmitted so we can easily follow the entire process. We also remember that the electrons have drift velocity E × B, pointing in the direction out of coplanarity, thus electrons loosing some of their energy to the E y component of the electric field. 2.2.1 Adiabatic Heating At weak, low mach shocks with wide ramp the heating appears primary in the direction perpendicular to the magnetic field and is consistent with the heating expected from conservation of magnetic moment as discussed above. In those shocks the magnetic and electric field gradients are very small so the condition for adiabatic heating, slowly varying field, stands. To understand the process let us follow step by step after a typical electron entering the shockwave. Coming from far upstream electron is accelerated in parallel direction in the ramp, there are no foot in low mach 20 shocks, but while in the ramp there is also the drift speed as mentioned above. Because of the drift electron looses energy to the Ey component of the electric field. Total energy gain by the electron can be expressed by eΔφ(x) in the HTF. While inside the ramp because of the magnetic mirror effect electron gyration energy rises as expected from the magnetic moment conservation, 2 Bd V⊥d = . Parallel acceleration comes from energy gained by electrons from the electric field 2 V⊥u Bu and is larger than the perpendicular and can be calculated from energy conservation 2 2 = Vu2 + eΔφ(x) − V⊥d V||d (2.11) So when electron reaches downstream constant fields region it is accelerated in parallel direction and also in perpendicular direction as expected from theory of magnetic moment conservation. Parallel acceleration is higher than perpendicular since the latter is constrained by the conditions on the magnetic moment. Electron heating is a two step process, while in our work we are interested in he first step only. First electrons are accelerated by the electric field, creating strongly accelerated electron beam, which is cooled in parallel direction and weakly heated in perpendicular direction. Eventual nearly isotropic downstream distribution forms due to irreversible processes in the second step. Observed distributions will be presented later. 2.2.2 Nonadiabatic Heating Observations showed(13) that for some shocks the measured downstream electron temperature greatly exceeds the adiabatic value, which means that an additional (or alternative) mechanism exists that provides the required heating magnitudes. There are several reasons why adiabaticity could be broken. The most obvious is the ramp width can become comparable to the electron gyroradius. This happens in extremely high mach number perpendicular shocks. In most stationary shocks the ramp width is still larger than the electron gyroradius, and at first glance this enforces adiabaticity. However, there are additional factors that can lead to the adiabaticity breakdown. In has been showed in (14; 15; 16; 17; 18) that adiabaticity condition is sensitive to the shock scale, 21 thus electrons will behave differently for wide and narrow shocks. The analizys of the electron trajectory dependence on the electric field slope in the ramp resulted the condition for adiabaticity breakdown α≡ e d Ex > 0 mΩ2 dx (2.12) which leads to change in electron behavior. When α >> 1 > 0, the gradient of the electric field is negative, the behavior in nonadiabatic resulting resulting high increase in V x component in form of Vx ≈ (α)Ωt, and when α < 0 and |α| >> 1 the behavior is adiabatic in form of (α)Ωt , namely resulting motion of E × B drift + gradient drift + gyration. Now let Vx ≈ cos us use this to follow typical electron entering the shock with narrow ramp. Entering the thin ramp electrons obey the above condition which breaks the adiabaticity, are accelerated by the electric field, resulting drastic increase of the Vx component. Electrons also drift in the direction of E × B, loosing some of their energy to Ey component of the electric field. In high mach shocks the ramp is very narrow so electrons don’t loose mach energy in the ramp to the E y component. When they reach the region of positive electric field gradient their behavior becomes adiabatic again, thus gaining large gyration energy which comes from the energy received from initial acceleration by the electric field. Perpendicular energy, acquired by an electron, can constitute a substantial part of the cross shock potential. Finally electrons leave the shock wave with perpendicular velocity being mach higher than expected from adiabatic heating and it is also higher than the parallel component of the velocity. Heating process here is somewhat similar to the adiabatic one, except the first step. In nonadiabatic case the perpendicular acceleration is much larger than the parallel resulting higher perpendicular heating. 22 2.3 Observed Electron Distribution Let us first look at the low mach shocks. In those shocks electron velocity distributions, F (v), conserving their magnetic moment. This mechanism transshowed heating perpendicular to B forms the usually gaussian upstream velocity distributions into gaussian shaped downstream distributions(20). We can see this behavior in the following figure(3; 4). upstream and Figure 2.1: Electron velocity distribution parallel(left) and perpendicular(right) to B downstream for weak shock. Whereas little difference is seen between upstream and downstream F (v|| ) in the left hand panel, the downstream F (v⊥ ) is definitely broader than the upstream F (v⊥ ) in the right hand panel. For stronger shocks we can see change in shapes of the downstream velocity distributions. Whereas at weak shocks the shapes are gaussian as mentioned above, at strong shocks they have flat tops for low energy electrons. 23 downstream Figure 2.2: Electron velocity distribution parallel(left) and perpendicular(right) to B for two strong shocks. 24 Chapter 3 Electron dynamics in the shock front numerical analysis In this section we present the results of the numerical analysis of electron motion in a model shock front. Numerical analysis is necessary since the equations of motion cannot be completely solved analytically. However, qualitative features of the electron motion can be understood and some quantitative estimates can be made. In this sense the numerical trajectory tracing should be considered as a supporting evidence, following and refining theoretical analysis but not substituting it. In the spirit of above we first summarize our theoretical expectations to be compared later with our simulations. We describe in detail the simulation parameters and procedure. For convenience the results are divided into subsections devoted to certain physical effect each: a) the influence of the cross shock potential and ramp width, b) the dependence on the angle between the shock normal and the upstream magnetic field, and c) the effects of the noncoplanarity of the magnetic field inside the shock. 25 3.1 Theoretical expectations 3.1.1 Ramp width and cross shock potential. As we have seen earlier, the cross-shock electric field plays the most important role in the electron dynamics inside the shock front. The cross-shock potential limits the energy an electron can get when crossing the ramp. The shock ramp width, on the other hand, determines whether the electron motion is adiabatic or non-adiabatic. We expect that the change in the behavior occurs when the ramp width is of the order of several electron inertial lengths. When the ramp is sufficiently narrow, electrons are efficiently dragged across the ramp by the electric field. Since adiabaticity is broken only when −(dEx /dx) < 0, it happens only in a half of the ramp, so that the energy available to nonadiabatic electron heating is not higher than a half of the cross-shock potential. Thus, for a vary narrow shock we expect that T⊥d ∼ 0.5eφ, while the parallel heating remains weak. In the other limit, if the shock is wide then T ⊥d /T⊥u = Bd /Bu , while the whole electron distribution is accelerated along the magnetic field, and the parallel energy of the electron beam would be ∼ eφHT , where φHT is the potential in the de Hoffman-Teller frame. The influence on electron reflection is less clear. In wide shocks the potential accelerates electrons along the magnetic field, thus reducing the magnetic mirroring. Thus, we expect that the higher is the potential the weaker is electron reflection in wide shocks. In narrow shocks, electrons behave nonadiabatically and can, in principle, acquire more substantial perpendicular energies than in the adiabatic case. This effect enhances magnetic mirroring, thus acting against electric dragging into the ramp. The interplay between the two effects would determine whether electron reflection is affected and how. 3.1.2 Angle between the shock normal and the upstream magnetic field Angle θ is another major player in the electron dynamics picture in the shock. Reflection process is directly connected to the value of the angle between the shock normal and the magnetic field. 26 We remember that for every ratio of of Bd Bu there is a certain angle θ which defines the loss cone. Inside this cone no reflection is possible while outside the cone reflection is permitted. If we plot all the initial parallel and perpendicular speeds for our electrons in NIF this cone will give us the border between the speeds that allow reflection and those that are not. It is easier to discuss this in HTF. When the angle θ changes we are also changing the minimum speeds that allow reflection, namely the VHT = Vu tan(θ) in HTF since for higher angles we have higher initial parallel speed. So increasing the angle θ we also increase the parallel speed in HTF which requires higher initial perpendicular speed to reflect the electron as can be seen from the reflection condition in HTF: V||2 Bd = − 1. 2 V⊥ Bu Angle θ also affects the behavior of the transfered electrons thrue the cross shock. In HTF where the reflection and transfer happens the electric field can be estimated to be E HT ≡ E||N IF · x̂ E||HT · x̂ = = ExN IF cos(θ). Since the expression has cos(θ) dependence the cross ˆ ˆ x̂ · Bu x̂ · Bu shock potential for quasi perpendicular shock in HTF will be mach lower than in NIF. For a typical angle in our work of θ = 75◦ we get ΔφHT F = 0.26ΔφN IF . This leads to higher final acceleration of the electrons with lower initial angle θ. We are interested in checking if the adiabaticity is broken will the electrons still obey the fundamental principles listed above or some new behavior will come out. 3.1.3 Noncoplanar component of the magnetic field Noncoplanar component of the magnetic field, By , due to it’s small strength has the smallest influence on the electron dynamics. For the transfered electrons it simply slightly reduces the cross shock potential. In the HTF, where the reflection and transmition of the electrons are calculated VHT × By (x)eˆy . This additional field reduces the cross By induces an additional field E˜x (x) = c shock potential thus reducing the energy that transfered electrons can acquire(19). Reflected electrons also feel the small effect of By . In adiabatic case it’s strength isn’t strong enough to significantly change the overall strength of the magnetic field(the change is about 5 27 percent) so it’s effect is extremely small and in the nonadiabatic case, where it does change the overall strength of the magnetic field by about 15 percent, the dominant field that governs the reflection is the electric field thrue it’s derivative making here also the effect of By relatively small to the effect of the electric field. In adiabatic case the reflection is helped by the small reduction of the cross shock potential because of the induces electric field. In conclusion we expect that B y will produce reflected electron only in cases where electron initially is near the reflection threshold so only small increase in the total magnetic field strength or cross shock potential will reflect it. Noncoplanar component of the magnetic field can’t be responsible for switching from adiabatic to nonadiabatic mode but it’s effect is still checked since it is one of the building blocks of the shock structure. 3.2 Parameters for numerical analysis In our numerical analysis we trace electron trajectories across a model shock profile. In order to determine the distribution of transferred and reflected electrons we specify the initial Maxwellian distribution of electrons upstream of the shock front. For the application to the Earth bow shock(13) we choose the upstream plasma velocity in the normal incidence frame as V u = 400 km/s. The upstream electron distribution will then look as follows fu (vx , vy , vz ) = (2πvT )−3 exp[−((vx − Vu )2 + vy2 + vz2 )/2vT2 ] where vT is related to the temperature in the usual way: v T = (3.1) T /me . For the numerical analysis we choose vT /Vu = 2.6 which corresponds to T ≈ 0.7 · 105 K, within the range of typical solar wind temperatures near the Earth orbit(13). Here x is along the shock normal, z is along the main magnetic field direction, and y is the noncoplanarity direction. Thus, in our notation Vu = (Vu , 0, 0), (3.2) 28 Bu = Bu (cos θ, 0, sin θ) (3.3) The corresponding de Hoffman-Teller frame velocity is VHT = (0, 0, Vu tan θ) (3.4) We are numerically solving the equations of motion dVx = −(Ex + Vy · Bz − Vz · By )/μ dt (3.5) dVy = −(Ey − Vx · Bz + Vz · Bx )/μ dt (3.6) dVz = −(Vx · By − Vy · Bx )/μ dt (3.7) where Vx , Vy , Vz are the velocities normalized with Vu , Bx , By , Bz normalized with Bu , t is me eBu t and μ = , in the normalized electric and magnetic the dimensionless time t = Ω i · t = mi c mp fields of the following shape R−1 3x sech Ex = −3α sin(θ) 1 + 2L L (3.8) Ey = sin(θ) (3.9) Bx = cos(θ) (3.10) 3x R−1 sech By = 3β sin(θ) 1 + 2L L (3.11) 29 3x R−1 Bz = sin(θ) 1 + 1 + tanh 2 L (3.12) Vu units, R is the magnetic compression ratio and α, β are the Ωi Bd scaling constants. For all simulations we used magnetic compression ratio of = 6 and shock Bu 2eΔφ is the normalized cross shock potential, L is the ramp mach number M = 6. Δφ ≡ mi Vu2 Vu units and By is the strength of the noncoplanar component of the magnetic field. For width in Ωi Bz , nonadiabatic case like L = 0.001 and moderately nonadiabatic case with L = 0.005, B y = 3 Bz . The magnetic field profile shape is taken so the while for adiabatic case of L = 0.01 By = 5.5 entire change in magnetic field happens in the ramp only. where L is the ramp width Figure 3.1: Magnetic field profile. 30 The output of the numerical analysis is the array of the points (v xf , vyf , vzf ) with constant t for the transmitted electrons (behind the shock front) and reflected electrons (in the upstream region). Althought in the final distribution the position for each electron is different but the maximum separation is about 0.5 ion gyroradius which is roughly equal to 100km. Majority of the final positions of the electrons are separated by no more than 0.3 ion gyroradius which is roughly equal to 60km and is acceptable and can be pictured in real world as measurement taken by a moving spacecraft. All velocities are normalized with Vu . Of particular interest are the distributions f (v , v⊥ ), where v = (v − Vs ) · B/B 2 , (3.13) 2 = (v − Vs )2 − v2 , v⊥ (3.14) Vs = cE × B/B 2 (3.15) 3.3 Numerical results 3.3.1 Effects of ramp width and cross-shock potential In those simulations we keep the angle between the shock normal and the upstream magnetic field θ = 75 constant. All simulation were made with 1000 test particles. Also cross shock 1 potential in NIF is set to three cases of Δφ = 0.2, 0.27, 0.34 mi Vu2 . Ramp width is taken to be 2 c Vu which equals to L = 2.5, 1.25, 0.25 electron inertial lengths. L = 0.01, 0.005, 0.001 Ωi Ωpe Now we will describe in general the data in the table below and later discuss the results in more detail. Percent of reflected electrons decreases with increase of the ramp width and with increase of the cross shock potential. Also the noncoplanar component of the magnetic field increases the percentage of the reflected particles. 31 Figure 3.2: Summary of the results of the simulations. The ramp width(L) and cross shock potential(Dp hi) are changed while the angle between the shock normal and the magnetic field(Theta) is constant. We also present the results of the influence of the noncoplanar component of the magnetic field(By ). − sign means that By = 0 and + sign means that By strength is according to the observed strength. Effects of ramp width Transfered electrons As we mentioned before electric field gradient is responsible for the switch between the adiabatic and nonadiabatic behavior of the electrons in the ramp. Ramp width has direct control over the strength of the electric field and therefore when changed should also demonstrate the two different modes. Nonadiabatic mode is characterised by high increase of perpendicular component V2 = 6, and therefore also higher downstream heating. of the velocity, above the adiabatic limit d⊥ 2 Vu⊥ We will present downstream distributions for the different ramp widths and examine those assumptions. Next three figures show transfered electron distribution for different ramp widths, from 32 nonadiabatic case L = 0.001 to moderately nonadiabatic L = 0.005 and finally the adiabatic case L = 0.01. In all three cases θ = 75◦ , Δφ = 0.27 and By is present. In adiabatic case as expected we can see broadening of the initial maxwellian distribution since all the electrons are accelerated Bd V2 = = 6, while in the nonadiabatic case we can see strong acceleration of the adiabtically, d⊥ 2 Vu⊥ Bu initial distribution, beyond the adiabatic limit, creating a ring in the velocity space. Figure 3.3: Final and initial downstream electron distribution for the nonadiabatic case of L=0.001 in x-y plane. We remember that nonadiabatic behavior happens only when the gradient of the electric field is negative, so for nonadiabatic case the perpendicular energy gain of the transfered electron equals about half of the cross shock potential. From the current downstream distribution we can estimate this downstream perpendicular energy gain. Since downstream angle θ becomes larger, namely grows from θ = 75◦ to θ = 87◦ the radius of the ring gives us approximately the final perpendicular speed, because of the definition of the perpendicular speed in x-z plane is V ⊥ = Vx sin(θ) − Vz cos(θ). So when the angle θ is large enought, like in our case, the perpendicular speed can be approximated to be V⊥ = Vx sin(θ), namely having only x component. Now the 33 total perpendicular speed is the combination of V x sin(θ) and Vy , thus lies in x-y plane only. In the current nonadiabatic case of L = 0.001 the estimated perpendicular temperature is 114.2eV. Cross ΔE = 0.49 which is very close to shock potential is Δφ = 232ev in NIF which gives us ratio of Δφ the expected ratio of 0.5. We can see almost perfect match to the theoretical expectation for the nonadiabatic case. The total temperature of the transfered electrons is 0.9 · 106 [K] for L = 0.001. The parallel energy gain will be discussed later for all cases. In the moderately nonadiabatic case of L = 0.005 the perpendicular temperature is 65.3eV ΔE = 0.28. The total temperature of the transfered electrons is 0.6·106 [K] which gives us ratio of Δφ for L = 0.005. Figure 3.4: Final and initial downstream electron distribution for the nonadiabatic case of L=0.005 in x-y plane. In adiabatic case of L = 0.01 the distribution remains maxwellian with perpendicular temΔE = 0.16. Initial perpendicular temperature is 5.6 eV perature of 36.1eV which gives us ratio of Δφ T⊥f which give the ratio = 6.5 of as expected from adiabatic heating. Small overheating comes T⊥i from overheating of electrons with initially small magnetic moment and will be discussed later. 34 The total temperature of the transfered electrons is 0.3 · 106 [K] for L = 0.01. In nonadiabatic case the downstream perpendicular temperature is 3 times higher than in adiabatic case. The results are consistent with observations made for near earth shocks(11; 13). Figure 3.5: Final and initial downstream electron distribution for the nonadiabatic case of L=0.005 in x-y plane. 35 Dominant perpendicular acceleration over the parallel is the distinct sign of nonadiabatic behavior which we couldn’t see in previous figures, so next figures will demonstrate this feature. Next three figures show transfered electron parallel and perpendicular speeds for different ramp widths, from nonadiabatic case L = 0.001 to moderately nonadiabatic L = 0.005 and finally the adiabatic case L = 0.01. In all three cases θ = 75, Δφ = 0.27 and By is present. We can clearly see the change in the dominance of perpendicular acceleration over the parallel acceleration in the nonadiabatic case and reversed behavior in adiabatic case. For L = 0.005 we see the transitional state between the two modes. Figure 3.6: Distribution of final parallel and perpendicular velocities for transfered electrons for nonadiabatic case of L=0.001. Red line is the boundary of equal parallel and perpendicular speeds. 36 Figure 3.7: Distribution of final parallel and perpendicular velocities for transfered electrons for moderately nonadiabatic case of L=0.005. Red line is the boundary of equal parallel and perpendicular speeds. 37 For adiabatic case the parallel energy gain should be equal to the HTF potential. In our case the HTF potential is 60.1eV and the parallel energy gain is 63.4eV which is consistent with the theory. Figure 3.8: Distribution of final parallel and perpendicular velocities for transfered electrons for adiabatic case of L=0.01. Red line is the boundary of equal parallel and perpendicular speeds. 38 As promised now we discuss the issue of the ratio of perpendicular acceleration. The most decisive feature of adiabaticity breakdown, perpendicular acceleration above the adiabatic limit is shown in the next figure. We see transfered electron total initial and final perpendicular speeds for different shock widths, L = 0.001, 0.005, 0.01. In all three cases θ = 75, Δφ = 0.27 and By = 0. We see that for high initial perpendicular speeds for all widths the acceleration is adiabatic while for low initial speeds it is highly nonadiabatic with clear higher values for narrow ramp case over V2 = 6,represented by black line, is holding in the wide ramp case. In adiabatic case the ratio of d⊥ 2 Vu⊥ mach wider region than in other widths, for about two thirds of the total speed scale, while in other cases the nonadiabatic behavior is covering the absolute majority of the scale. Those results for low initial perpendicular speeds are expected since for low initial perpendicular speeds the initial magnetic moment is also low and any change due to the increasing magnetic field will certainly increase it above the adiabatic limit. Figure 3.9: Final and initial perpendicular speeds for transfered electrons. Adiabatic perpendicular acceleration is clearly seen for wide ramp case and is represented by the black line. 39 Another demonstration of the differences between the regimes is shown in the next figure. Here we plot the speed Vx of transfered particle as a function of X for two regimes as a demonstration of particle behavior in the ramp. We can see that for narrow ramp high gyration develops increasing the perpendicular speed above the adiabatic estimate thus making it easier to produce reflected electron. Figure 3.10: Demonstration of adiabatic and nonadiabatic behavior in the ramp for transfered electron with identical initial conditions. This is another confirmation to our early assumptions that narrowing the ramp will produce nonadiabatic behavior, high perpendicular acceleration in the ramp and increasing the number of the reflected electrons. Reflected electrons Now we turn our attention to the reflected particles behavior for changing ramp width. We know that nonadiabatic acceleration produces very high perpendicular acceleration. As the per40 pendicular part of the acceleration increases, the parallel decreases making it easier to satisfy the reflection condition, namely reducing the parallel speed to zero. We can see it in the following figure, as the ramp width decreases lower initial perpendicular speed is sufficient to produce reflected electrons. This is the contribution of the nonadiabatic acceleration to the reflection process, namely high increase in the percentage of the reflected electrons due to softening of the initial condition required for reflection as we can see in the following figure. The reflection percentage changes significantly with change of the ramp width, 11.25 for L = 0.001, 1.62 for L = 0.005 and 0.92 for L = 0.01 with similar behavior of the results for all cross shock potential values, namely very high increase in reflection for low ramp widths. Ramp width has very large effect on the electron dynamics and in the next section we will compare it to the effect of the cross shock potential. Figure 3.11: Number of reflected electrons for all ramp widths as a function of initial perpendicular speed. Cross shock potential is Δφ = 0.2. 41 The nonadiabatic behavior in the ramp is responsible for high increase of perpendicular velocity leading to reflection. We can see this in the next figure where two identical electrons approach the ramp when in the first case the ramp is wide, L = 0.01, so the electron is transfered to downstream with it’s perpendicular speed increased adiabatically. I second case the ramp width is L = 0.001, satisfying the condition for breakdown of adiabaticity in the upstream half of the ramp, e d Ex > 0. We can see in the figure very high increase of the Vx component in namely α ≡ mΩ2i dx the upstream half of the ramp and high gyration in the downstream side. Figure 3.12: Trajectory of electron with same initial velocities but different ramp widths, L=0.01 for adiabatic case with no reflection and L=0.001 for nonadiabatic case with reflection. 42 No we zoom in to inspect in more detail. Next figure is a zoom in for adiabatic case. We can see that as the electron enters the ramp it continues to gyrate. Figure 3.13: Vx as a function of X for adiabatic case in the upstream half of the ramp. 43 Next figure is for the nonadiabatic case. As the electron enters the ramp we see very high increase in Vx component without the gyration. Figure 3.14: Vx as a function of X for nonadiabatic case in the upstream half of the ramp. 44 In extreme nonadiabatic case, L=0.001, the reflected electron crosses to the downstream and returns to the upstream during the reflection, namely is not confined to the ramp. The electron simply can’t move away from the ramp fast enought before it returns back to the ramp. Figure 3.15: Y as function of X in the ramp for both reflected(nonadiabatic) case and transfered(adiabatic case.) Ramp range is from −0.01 to 0.01 in adiabatic case and from −0.001 to 0.001 in nonadiabatic case. 45 In adiabatic case, L=0.01, the reflected electron is confined to the ramp region during the reflection. The situation is the same for the moderately nonadiabatic case, L=0.005. Figure 3.16: Y as function of X in the ramp for reflected(adiabatic) case. Ramp range is from −0.01 to 0.01. Varying cross shock potential Transfered electrons Now we move to the part of varying cross shock potential. It’s effect on the transfered electrons as stated before is clear, the increase in potential allows more parallel acceleration on one hand and also allows more perpendicular acceleration in the nonadiabatic case on the other hand. In adiabatic case, wide ramp, the perpendicular acceleration remains constant since the increase in electric field is not strong enough to switch to the nonadiabatic mode. Next two figures show the parallel and perpendicular acceleration for nonadiabatic case for all cross shock potentials to demonstrate the acceleration process. 46 Figure 3.17: Parallel acceleration as a function of the crosshock potential. Figure 3.18: Perpendicular acceleration as a function of the crosshock potential. Finally in next figure(3.18) we show the verification of the perpendicular acceleration which remains constant for all the values of the cross shock potential for adiabatic case. The black line is the adiabatic limit for increase of the perpendicular velocity. The limit is obeyed for all potential except for low initial perpendicular speeds which is explained as before. 47 Figure 3.19: Confirmation of adiabatic behaviour for wide ramp case for all crosshock potentials. Reflected Electrons Turning to the influence of the cross shock potential on the reflected electrons we remember that it has dual effect. On one side it enlarges the gradient of the electric field, breaking the assumption of the stationarity of the fields and breaking the adiabaticity, thus helping the reflection process and on the other side in adiabatic case it just accelerates electrons more in parallel direction reducing the mirroring. The percentage of reflected particles for nonadiabatic case is 11.25 for Δφ = 0.2, 7.61 for Δφ = 0.27 and 4.27 for Δφ = 0.34. The effect is not as strong as was with the change of the ramp width where the drop in percentage was mach higher. It is difficult to discuss the purely adiabatic case since reflection vanishes very quickly with increased potential, but instead we will check the moderately nonadiabatic case. We can see the same moderate reduce 48 in reflection as the potential increases, with values of 1.62 for Δφ = 0.2, 0.58 for Δφ = 0.27 and 0.23 for Δφ = 0.34. We can understand the results if we remember that increase in cross shock potential tends to increase the parallel speed and reduce mirroring, effect which is more dominant in nonadiabatic and moderately adiabatic cases than the effect of high increase of the perpendicular speed, due to increase in available energy, which increases mirroring. In adiabatic case the only influence on reflection is the increase in parallel speed and from the results we can see the general behavior of reduced reflection as the potential increases. Finally we can conclude that in our case ramp width has the dominant effect on the electron dynamics while the cross shock potential plays secondary role. 3.3.2 Effects of the angle between the shock normal and the upstream magnetic field In the section of the varying angle between the shock normal and the magnetic field we address two main points, the effect on the cross shock potential and the effect on the reflection thrue the loss cone. First we present the summary of the simulation data. Here Δφ, the cross shock potential, Bd = 6 and shock mach number is constant. For all simulation magnetic compression ratio Bu Vu M = 6. Dphi is the cross shock potential, L is the ramp width in units and By is the strength Ωi of the noncoplanar component of the magnetic field. For nonadiabatic case like L = 0.001 and Bz and for adiabatic case of L = 0.01 moderately nonadiabatic case with L = 0.005 By = 3 Bz . All simulation were made with 2000 test particles. By = 5.5 49 Figure 3.20: Summary of the results of the simulations. The ramp width and angle between the shock normal and the upstream magnetic field are changed while the crosshock potential is constant. We also present the results of the influence of the noncoplanar component of the magnetic field. In general increase in θ also increases the percentage of reflected particles as expected. As before we will now discuss the results in more detail. First we address the effect of θ on the cross shock potential. Next figure(3.21) shows total final and initial speeds for transfered electrons for all angles and without the B y component. Here the adiabatic case is shown since it has the best separation between the different angles. Total speed becomes larger as the angle becomes smaller as we expected since decrease of the angle increases the strength of the cross shock potential in HTF, making more energy available for the electrons, which is cos(θ) dependent. For example for θ = 85◦ the HTF potential is 20.2ev, θ = 75 the HTF potential is 60.1ev and for θ = 65◦ the HTF potential is 98.1ev. Turning to reflected electrons we are interested in verifying the assumption that changing the 50 Figure 3.21: Transfered electron acceleration as a function of the angle between the shock normal and the upstream magnetic field. angle θ will also change the percentage of the reflected electrons due to the change of the loss cone and initial conditions which allow reflection. We remember that reducing the angle also reduces the demand for high initial parallel and perpendicular speeds for reflection. In next figure(3.22) we show the total initial parallel and perpendicular speeds in coordinate system where the Y-axis is the perpendicular speed and X-axis is the parallel speed. We clearly see that when the angle increases the initial speeds of the reflected electrons are pushed to the upper section, to the higher initial values of the perpendicular speeds. In conclusion we can say that nonadiabatic mode with angle change didn’t provided us with any new data, namely the same principles that guided the electron dynamics during the change of the angle between the shock normal and the magnetic field still stand. 51 Figure 3.22: Initial parallel and perpendicular speeds for the reflected electrons for all angles and L=0.001. 3.3.3 Effects of the noncoplanar component of the magnetic field The next point of interest is the influence of the noncoplanar component of the magnetic field B y on the electron dynamics. We expect to see small increase in percentage of the reflected particles for both adiabatic and nonadiabatic cases because of the increase of the total strength of the magnetic field. We remember that this effect is small because of the reasons mentioned above and indeed in the results we can see that the maximum increase in reflection for ramp width change cross shock potential change and θ changes is about 1 percent with most of the values are changed no more than 0.5 percent. As for transfered electrons the effect of By is to reduce the cross shock potential, up to 10 percent in adiabatic case and insignificant change in nonadiabatic case, because of the additional induced electric field which tends to lower the total energy gained by the electrons. Next figure will demonstrate this, as it shows total initial and final speeds of the transfered electrons. 52 Figure 3.23: Total final speed of the transfered electrons with and without the noncoplanar component of the magnetic field in adiabatic regime. The increase in electron speed comes from parallel component since in perpendicular direction it is insignificant in nonadiabatic case while in adiabatic case it is non existant because the perpendicular acceleration is restricted by the magnetic moment conservation. In next figure(3.24) we see typical increase in parallel acceleration for different noncoplanar magnetic field component strengths in adiabatic regime. Finally we conclude that the early assumption for noncoplanar component of the magnetic field are verified are found to be correct and electron dynamics with changing strength of By are explained. 53 Figure 3.24: Total final parallel speed of the transfered electrons with and without the noncoplanar component of the magnetic field in adiabatic regime. 54 Chapter 4 Emitted Radiation As stated before in most cases radiation emitted from heated electrons is the only evidence of the shockwave presence. Using our model we can estimate radiation power from heated downstream electrons in different astrophysical objects. We calculate the radiation power of the electrons from our model in nonrelativistic and relativistic(supernova) cases and compare it to the measured values. In first part, nonrelativistic case, we calculate radiation power for cyclotron and breaking radiation with near earth shock parameters and in the second part, relativistic case, supernova shockwave is simulated and total radiated power for x-ray breaking radiation is calculated. 4.1 Nonrelaivistic case As we stated in the introduction shock waves are important sources of radiation. It is easy to calculate the frequency of the radiation since in our non relativistic case it is just line emission at an electron gyrofrequency. ν= e·B 2π · me (4.1) For downstream strength of the magnetic field of about 50nT to 100nT it gives us emission 55 at the radio region with wavelengths of 100km to 200km. We can calculate radiated power for single electron from Larmor’s equation. P = 2e2 · a2 3c3 (4.2) e·B . me We will calculate radiated power per cubic centimeter for typical nonadiabatic case. We take with a = v⊥ · ωg and ωg = electron perpendicular speed distribution for case of θu = 75 and θd = 87.5, Δφ = 0.27 without the By component and ramp width of L = 0.001. The equation we use to calculate the total radiated power is just the integral of distribution of transmitted electrons perpendicular velocities, number of electrons for each velocity, times P for each velocity. The boundaries of the integral are taken from the velocities distribution. Finally we divide the result by the number of electrons, nel , to receive the power for single electron and multiply by ρ to get radiated power for cubic centimeter Prad ρ = nel V ⊥2 V ⊥1 [F (V⊥ ) · P (V⊥ )] dV⊥ (4.3) where F (V⊥ ) is the downstream perpendicular velocity distribution and P (V ⊥ ) is the radiaerg tion power at a specific perpendicular velocity. In our case the result is P rad = 2.1 · 10−31 cm 3 . The power is extremely low so we can assume that the cyclotron radiation from the near earth shock waves is not a significant source of radiation. Next we calculate the breaking radiation from the accelerated electrons in the downstream region. We use the following expression for the calculation of the radiation power(27): P = 1.4 · 10−27 ne [cm−3 ]ni [cm−3 ](Te [K])1/2 erg cm3 (4.4) Near earth upstream particle density is about 5cm−3 (31) and the temperatures that are taken from our simulations are 3, 6, 9·105[K] for the adiabatic moderately nonadiabatic and nonadiabatic 56 cases respectivly. The radiation energy is in the UV wavelength and lower and using the expression erg above we have the radiation power of: 6.9, 9.8, 11.9 · 10−22 3 . This value is much larger than cm one we got for the cyclotron radiation and can be measured in cases where the emitting volume is large enought. 4.2 Relativistic case To produce simulation of relativistic shock wave we made some changes to the simulation parameters and field profiles. Our new parameters are as follows(21; 22; 23; 24; 25; 26): Mach number mi Vu2 km is M=30, upstream flow speed is Vu = 4000 , eΔφ = 0.15 = 12.53Kev, magnetic comsec 2 pression ratio is R=30 in the overshoot and downstream strength of the magnetic field is R=5. The magnetic field profile is shown in figure (4.1). Initial electron distribution is taken at temperature of 5.53·10 4[K]. The simulations are made for two cases of ramp width, L=0.001 and L=0.01. The results of the simulations are as follows: Final temperature for transfered electrons is 6.6 · 107 [K], 5.7Kev for L=0.001, while final temperature for wide ramp, the adiabatic case, is too low to produce x-ray radiation. We want to calculate the breaking radiation power of the final downstream electron distribution. We make use of the following equation for breaking radiation power: P = 1.4 · 10 −27 −3 −3 ne [cm ]ni [cm ](Te [K]) 1/2 erg cm3 (4.5) for Maxwell downstream distribution of the electrons. In our case the distribution differs from Maxwell’s but the power can still be approximated since the difference between the distributions will not result in large difference in radiation power. The estimate for electron and proton density in the upstream is 0.5cm −3 to 5cm−3 (22; 30) and in the downstream it increases by facerg tor of 5. For nonadiabatic case the emitted radiation power ranges from ≈ 7.1 · 10 −23 3 to cm 57 Figure 4.1: Magnetic field profile for relativistic simulation. erg . Now we would like to estimate the total radiation power of a typical SNR cm3 using our model of heating. Typical radiation producing volume in the SNR is about 10 56 − ≈ 7.1 · 10−21 1057 cm−3 (29). Thus for the nonadiabatic case the total radiation power in X-ray spectrum is in erg order of ≈ 7.1 · 1033 − 7.1 · 1036 , which is compatible with observations(28). sec 58 Chapter 5 Conclusions Understanding electron heating and acceleration by collisionless shocks is very important for understanding emission observed in a number of astrophysical objects. In the present work we have studied the electron dynamics in the quasi-perpendicular shock front in adiabatic and nonadiabatic regimes. The analysis has been done using numerical analysis of test particle motion in prescribed stationary electric and magnetic fields. We have studied the dependence of the transition from the adiabatic heating to non-adiabatic heating and the distribution of the transmitted electrons on the shock parameters, like ramp width, cross-shock potential, the angle between the shock normal and upstream magnetic field, and the noncoplanar component of the magnetic field. Ramp width was found to have the most influence on the electron dynamics. As the ramp becomes thinner and the electric field gradient becomes bigger we saw transition between the adiabatic to nonadiabatic regime. Instead of the usual electron gyration in the ramp in adiabatic case we saw high increase of the electron’s Vx velocity in the first half of the ramp and transformation of gained velocity into gyration velocity in the second half of the ramp, where the adiabaticity is restored. In the course of the acceleration electrons acquire a substantial part of the cross-shock potential which, in turn, constitutes a substantial part of the incident ion energy. As expected the result of this transition was substantially higher downstream temperatures of electron distributions, 59 heated in the direction perpendicular to the magnetic field. Electron reflection off the shock front was also enhanced in the nonadiabatic case, due to higher gyration velocities and more chances to be reflected within the ramp by the increasing magnetic field. While the transition to nonadiabatic regime is largely determined by the ramp width, the energy available for electron heating is provided by the cross-shock potential, and the downstream temperature correlates with the potential. The effect of the cross-shock potential on electron reflection was was found to be weak and negative: increased cross shock potential decreased reflection for all ramp widths. In wide ramp it was expected since higher cross shock potential simply accelerates the electrons along magnetic field reducing mirroring. In nonadiabatic case were higher perpendicular speeds in the ramp can occur the effect of acceleration along the magnetic field was still stronger that the effect of enlargening of the perpendicular speed resulting lower reflection when the potential increases. Simulations with change in the angle between the shock normal and the upstream magnetic field did not provide any new information relevant to the nonadiabatic case. The behavior we saw is consistent with the results obtained in the past, namely decreased reflection as the angle increases, since the loss cone also becomes bigger as the angle increases. The main effect of the noncoplanar component of the magnetic field was found to be changing the cross shock potential. We saw that decrease of By increased the cross shock potential, however the increase was very small for adiabatic case, usually less then 10 percent which is not enought to change the regime of the electron, and even smaller in the nonadiabatic case. In both cases the final effect was the increase in reflection as the By increased. Finally we applied the model to x-ray radiation power output of a typical supernova. To achieve this objective simulations were made with shock parameters consistent with available data for supernovae. Breaking radiation power was calculated and total power output was found to be erg which is compatible with current observations. ≈ 1033 − 1037 sec 60 Bibliography [1] C.C. Goodrich , J.D. Scudder, J.Geophys.Res., 89, 6654-6662, 1984. [2] M.H. Farris , C.T. Russel, J.Geophys.Res., 98, 15285, 1993. [3] B.T. Tsurutani , R.G. Stone, Geophysical Monograph 34. [4] B.T. Tsurutani , R.G. Stone, Geophysical Monograph 35. [5] J.A. Newbury , C.T. Russel , M. Gedalin, Geophys.Res. Letters, 24, 1975, 1997. [6] M. Gedalin , M.A. Balikhin , V.Krasnosselskikh, Adv.Space Res., 15, 247, 1995. [7] J.A. Newbury , C.T. Russel , M. Gedalin J.Geophys.Res., 103, 29581, 1998. [8] E.W. Greenstadt , C.T. Russel , J.T. Gosling, J.Geophys.Res., 85, 2124, 1980. [9] J.R. Wygant , M. Bensadoun , F.S. Moser, J.Geophys.Res., 92, 11109, 1987. [10] M.A. Balikhin, J.Geophys.Res., 107,A8, 10.1029/2001JA000327 , 2002. [11] S.J. Schwartz, J.Geophys.Res., 93, 12923, 1988. [12] C.S. Wu, J.Geophys.Res., 89, 8857, 1984. [13] M.F. Thomsen, J.Geophys.Res., 92, 10119, 1987. [14] M. Gedalin , K. Gedalin, J.Geophys.Res., 100, 9481, 1995. 61 [15] M. Gedalin , K. Gedalin, J.Geophys.Res., 93, 19911, 1995. [16] M. Gedalin , U. Griv , M.A. Balikhin Nonl.Proc.Geophys., 4, 173, 1997. [17] M. Gedalin , M.A. Balikhin, Nonl.Proc.Geophys., 4, 167, 1997. [18] M. Gedalin , M.A. Balikhin , V.Krasnosselskikh, Adv.Space Res., 15, 225, 1995. [19] D. Krauss-Varban , C.S. Wu, J.Geophys.Res., 94, 15267, 1989. [20] M.F. Thomsen , J.T. Gosling , S.J. Bame , M.M. Mellot, J.Geophys.Res., 90, 137, 1985. [21] J.M. Laming ,Ast.J.Supplment Series., 127, 409, 2000. [22] J.M. Laming ,Astrophysical Journal., 546, 1149, 2001. [23] J. Vink , J.M. Laming ,Astrophysical Journal., 587, L31, 2003. [24] J. Vink ,Advances in Space Research., 33, 356, 2004. [25] J. Vink ,Nuclear Physics B., 132, 21, 2004. [26] J.D. Jackson Classical Electrodynamics. [27] S.N. Walker, H.St.C.K. Alleyne, M.A. Balikhin, M. Andre, and T. S. Horbury ,Annales Geophysicae., 22, 2291, 2004. [28] K. Torii, H. Uchida, K. Hasuike, and H. Tsunemi., arXiv:astro-ph/0601569 v1, 2006. [29] J. Vink, J. Bleeker, K.V. DER Heyden, A. Bykov , A Bamba, R. Yamazaki., arXiv:astroph/0607307 v1, 2006. [30] J.M. Laming ,Astrophysical Journal., 563, 828, 2001. [31] T.K. Suzuki and Shu-ichiro Inutsuka., arXiv:astro-ph/0511006 v8, 2006. 62































































![NAME: Quiz #5: Phys142 1. [4pts] Find the resulting current through](http://s1.studyres.com/store/data/006404813_1-90fcf53f79a7b619eafe061618bfacc1-150x150.png)