Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Velocity-addition formula wikipedia , lookup
Fluid dynamics wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Hunting oscillation wikipedia , lookup
Shear wave splitting wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Classical central-force problem wikipedia , lookup
Equations of motion wikipedia , lookup
Work (physics) wikipedia , lookup
Matter wave wikipedia , lookup
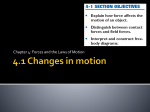
Introduction to Soft Matter Physics- Lecture 5 Submitted by: Ilya Osherov In this lecture we are going to discuss two topics: 1. Fluid dynamics 2. Surface waves 1. Fluid Dynamics 1.1 Simple Shear Figure 1: Simple Shear Force acting on a surface in a viscous fluid is decomposed into components normal to the surface, i.e. pressure, and tangential to the surface, called shear stress σ. In general, the mechanical stress is a tensor, whose diagonal components characterize pressure and non-diagonal components characterize shear stress. For common fluids, the shear stress is proportional to the gradient of velocity field, with viscosity defined as a coefficient of proportionality, such as in Fig. 1. f ∂vx v = σxy = η =η S ∂y h Viscosity causes energy losses, which are calculated per unit time and per unit volume are proportional to viscosity and to the square of velocity gradient. E.g. in Fig. 1: v 2 fv ∂vx 2 ∆E =− = −η = −η ∆t∆V Sh h ∂y We can think of viscous phenomena in terms of momentum transport. The shear stress applied to the upper plate is in fact the momentum flux 1 Jp injected into the system by the force on the boundary. We can easily see this in the following way. First we write: F F ∆t ∆p σxy = = = = Jp S S∆t S∆t Then ∂vx J = −η (1) ∂y is a typical relation from the theory of transport phenomena: velocity gradient leads to the associated flux of momentum. The momentum is getting transported from layer to layer by shear forces in between the layers, or, on the molecular level, by molecules jumping from one layer to another and transporting the moment with them. It is easy to see without solving any equations that in stationary conditions (after long enough time passed since the beginning of motion) the velocity gradient is constant across the liquid depth in Fig. 1: in the stationary conditions the velocities of the layers do not change. This means that the momentum is transported from the upper plate downwards without ”sticking” anywhere, i.e. the momentum flux is constant across the liquid and therefore via Eq. 1 velocity gradient is constant too. We can estimate the characteristic time scales of establishing the gradients by introducing kinematic viscosity ν = η/ρ. Kinematic viscosity has units of m2 /s, same units as diffusion coefficient. In fact, for gases it is equal to the diffusion coefficient of molecules. Shear stress thereby propagates in a diffusion-like manner with a kinetic rate determined by ν. E.g. within time t the stress propagates at the distace: √ y ∼ νt Thus for the system in Fig. 1 the characteristic time to reach the stationary state can be estimated from: tH = H2 v Lets see what happens to the system as it is reaching the steady state. At the beginning the momentum starts propagating in the liquid. Only the upper part of the pool knows about the motion. The gradient is not constant. It equals 0 at the bottom and to some value at the top. The plate is already in motion but the information about the motion has not yet propagated through the whole pool. Lets focus on some layer at the center 2 of the pool. Momentum enters this layer from above. The momentum that will leave this layer downwards will be smaller (since the gradient on the upper side of the layer is larger than that on the lower side), thus some momentum will accumulate in the layer and the layer will accelerate. At this time all the layers are accelerating, the motion is propagating downwards from the upper plate and the velocity gradient is getting distributed over a progressively wider range. After some time the velocity gradient will become constant over the depth of the liquid, and the system will stabilize. The layers will no longer accelerate. All the momentum that will come from above will move through the whole system until it reaches the bottom. 1.2 Navier-Stokes eq. The main equation of fluid dynamics is the Navier-Stokes eq. ∂~v ρ + (~v ∇)~v = −∇p + η∇2~v + sometimes volume forces, e.g ρ~g ∂t Were ρ is fluid density and p is pressure. It is essentially just an application of the second law of Newton to the unit volume portion of fluid. Navier-Stokes equation has to be complemented by the continuity equation, which for incompressible fluid is just div ~v = 0 For compressible liquids div(ρ~v ) = 0 Where ρ is water density. Notice that the amount of the liquid in total is constant (the amount of mass does not change). Navier-Stokes equations are differential equations and have to be supplemented by boundary conditions, which are typically the non-slip conditions, i.e. the velocity of the liquid layer adjacent to the solid surface is equal to the velocity of that surface. We also define a kinetic viscosity which has the units of diffusion coefficient and for gases (not liquids) is in fact equal to the diffusion coefficient (check your Thermo II notes). η ν= ρ Reynolds number is an estimate of the relative importance of the nonlinear term in the Navier-Stokes equation: Re = v 2 /l vl vlρ v∇v ≈ = , = ν∇2 v νv/l2 ν η 3 (2) where v and l are respectively the characteristic velocities and characteristic sizes of the objects. In colloidal physics, the objects are so small (typically < 1µm), that Re 1 and nonlinear term in the Navier-Stokes equation is neglected in most of the cases. Solving field equations is not an easy task even for small Reynolds Numbers for which we can neglect the non linear part. (~v ∇)~v So far there is no general solution for Navier-Stokes differential equations and there is a one milion dollar award prize to be given to the one who will solve the Millennium Problem. However there are solutions in some private cases and it is possible to get a good intuition without actually solving these equations. We are going to discuss a few of the problems in order to develop such an intuition. We can learn many things about the system if we understand a few basic principles in fluid dynamics. The main principles are: • The motion of an object in fluid leads to gradients in velocity, pressure and shear stress (see below) at the distances of about the object size. • Pressure field propagates with the speed of sound: infinitely fast for colloidal-type problems • Shear stress propagates in a diffusion-like manner with a ”diffusion” coefficient of ν (see Eq. 1.34), so that within time t the shear stress 1 propagates to the distances of ∼ (νt) 2 1.3 Basic problem- Periodic Pure Shear Now we demonstrate the use of the above principles by looking at a classical problem of fluid dynamics. The system is similar to the one we dealt with in 1.1 (Fig 1). We apply tangential harmonic force f ∼ sin(ωt) on a surface of unit area in a viscous fluid. The plate moves in one direction of half of the period T , during that time the motion propagates downwards, then the plate changes the direction canceling the effect of prior motion. Thus from the third principal we infer that the shear stress in this system propagates and the motion is confined within the distance r p ν δ ∼ νT /2 ∼ ω 4 1.4 Basic problem - Drag force on a moving sphere, Stokes law A sphere of radius R moves through the liquid with constant velocity v. Liquid exerts a viscous (drag) force acting on the sphere. What is this force? The exact calculation gives F = 6πηRv (Stoke’s law). Let’s see how to obtain this law (up to a numerical coefficient) from qualitative arguments. We understand that shear stress acts over the surface of the sphere, that the shear stress is proportional to velocity gradient, and, the main point, that velocity in the liquid drops from ∼ v at the surface of the sphere to ∼ 0 over the distances of the order of radius R. Thus the velocity gradient can be estimated as v/R. Then F ∼ σS ∼ η∇vS = η v 4πR2 ∼ 4πηRv R The exact solution is F = 6πηRν 1.5 Basic problem- Velocity field around a moving Sphere Figure 2: One sphere in a viscous liquid A sphere moves with low and constant velocity in a liquid. We are interested in how the velocity decays away from the sphere. The exact solution is rather tedious. Thus would like to solve the problem qualitatively. It is intuitive to think that the further the point in liquid is from the sphere the less it feels the effect of the motion. We assume that the velocity field of the sphere decays as a power law: v(r) ∼ r−n . What power n is equal to? Why does liquid move at all? Lets first consider mass conservation in the system. The sphere moves, thus it has to push liquid from the forward direction and get some liquid filled on its back. In order to estimate the power law, let’s think first of a system of an expanding non moving sphere. 5 Its volume grows, the liquid is pushed outwards and according to the conservation of mass law, same mass has to pass through all the closed surfaces around the sphere. Thus we get that that the flux of the velocity is constant v(r)4πr2 = const → v(r) ∼ r−2 The motion of the sphere can be imagined as an expansion in the front and shrinking at the back of the sphere and because of linearity of equations for (Re << 1), well get a field similar to electrical dipole v(r) ∼ r−3 This in fact was a valid consideration. However, the real dependence is v(r) ∝ r−1 . We didnt get the correct result because we ignored viscosity and only considered mass conservation. Another reason for the motion of liquid is viscosity. To take that into account we should consider momentum conservation. Going into the reference frame of the sphere we see that the motion is stationary and therefore the momentum transferred from the sphere to the neighboring layer should pass without changes to system boundaries far away: Jp 4πr2 = Const ⇒ η4πr2 dv dv 1 1 4πr2 = Const ⇒ ∝ 2 → v(r) ∝ dr dr r r 1.5 Basic problem- Two spheres problem (interactions) Figure 3: Two shperes in a viscous liquid A force acting on the second sphere will move it and produce the motion of the liquid around it decaying ∝ 1/r with the distance from the second sphere. The first sphere will be dragged with this motion of the liquid. This type of interactions between the motions of two objects mediated by 6 the liquid are called Hydrodynamic Interaction. Notice that they decay extremely slowly, like ∝ r−1 , much slower than any other interaction. That’s why they usually cannot be neglected in the calculations of dynamics of the system (however, they are totally irrelevant for the statistical properties of a system). A rather symmetric way of writing down these interactions is given below (valid under certain approximation): v1 = F~1 F~2 + 6πηR1 6πηr12 i.e. the velocity of a bead is caused by the forces acting on this bead directly as well as by other forces applied to other objects which act on the bead indirectly, via hydrodynamic interactions . 2. Surface waves (Water waves) 2.1 Introduction Water waves are one of the oldest topics in fluid mechanics. We are going to discuss two different types of surface waves Gravitational waves and Capillary waves. Each type got its name because of the origin of its potential energy. Gravitational waves are connected to the earth gravitation potential where is capillary waves are originated in surface energy of the water. Generally all the waves in nature are partly gravitational and cappillar. For shorter wavelengthes the capilary part is more important and for long wavelengthes the gravitational part is what determines the behavior. We are interested to find out what is the dispersion relation and also to understand the reason for fading of the waves. 2.2 Gravitational waves One has to consider gravitational potential energy, kinetic energy of the fluid and viscous losses. 2.2.1 Deep water (wavelength λ << H depth): Motion is confned to the surface layer of λ in depth; all of the viscous losses happen there; the characteristic velocity of the fluid is similar to surface elevation depreciation speed ∼ ḣ. Like in all oscillators the total energy of the system is the sum of kinetic and potential energies which are functions of distance from the equilibrium point. For now lets assume a regular harmonic oscillator and ignore energy 7 losses. We also assume λ wavelength. We will try to construct an equation similar to harmonic oscillator. Although it is possible to calculate it precisely we will try to get qualitative answer up to pre-factors. First we assume a closed system, a very deep pool. Now lets say that there is a distortion with characteristic height- h on the surface. The characteristic velocity is ḣ. We want to find the gravitational potential energy. The general formula is Mgh. The mass of the moving fluid is M = ρV = ρhLx Ly And we get that the potential energy U = M gh = (ρhLx Ly ) gh = (ρLx Ly )gh2 Kinetic energy is proportional to the square of velocity 1 1 K = M ḣ2 = (ρLx Ly λ) ḣ 2 2 So the total energy E = U + K = Const after differentiation with time U̇ + K̇ = 2 (ρLx Ly ) ghḣ + 1 (ρLx Ly λ) ḧ 2 And if we ignore the factors we get an eq. of the form ḧ + g h=0 λ And this is a harmonic oscillator with dispersion relation r g √ ω= = gq λ The group velocity is vg = √ 1 dw ∼√ ∼ λ dq q From this we see that that group velocity grows as function of wavelength. The only parameter we have in the problem that tells us how much the wave penetrates the water is wavelength λ. There are many ways to explain this. 8 One of which is: even waves with very low amplitude crate motion of the water to the depth because water has to pass very long distances (meters). Wavelength can be up to several meters and thats what will determine how much the disturbance will advance in the liquid. Now well deal with energy losses (viscosity). Well get damped harmonic oscillator. K̇ + U̇ + Ė = 0 Ė = −η(∇v)2 V ≈ −η ḣ λ !2 λLx Ly And from these two eq. We can get the damping coefficient Ė η Γ= = 2 = νq 2 K λ ρ 2.2.2 Shallow water (h H λ): Motion occurs throughout the λ depth of the liquid; the characteristic velocity is much larger (by ∼ H ) than surface elevation/depreciation velocity due to continuity; the largest velocity 1 gradient and hence the main losses occur in a thin (∼ (v/w) 2 ) layer near the bottom. In this case the calculation of potential energy is same as in 2.2.1 but kinetic energy changes. 1 1 K = M ν 2 = (ρLx Ly H)ν 2 2 2 This time we have to move the same amount of mass but through a thinner layer (H instead of λ). From the continuity Eq. the fluid velocity will be much higher than that of surface elevation/depreciation. ḣλ = vH → v = ḣλ H And we get !2 1 1 ḣλ K = M v 2 = (ρLx Ly H) 2 2 H r p k 1p ω= = qH = q gH m λ This is linear dispersion relation. Now we add energy losses. It is natural to deal with them in same way as in 2.1.1 and to get !2 ḣ V2 Ė = −η HLx Ly ≈ −ηLx Ly λ H 9 But this is small contribution compared to the friction losses in the thin layer δ at the bottom of the pool where the problem is similar to that of periodic motion of a plate: ḣ Ė = −η δ !2 δLx Ly ≈ −ηLx Ly Where V2 δ r V ω Now we can the damping coffisient and we will get that for shallow water Ė 2ηH V 2 = Γ= K δρ ḣλ δ= 2.3 Capillary waves The main factor in the potential energy is surface tension energy. When we create a distortion in the pool, we create a new surface and this costs us energy. Surface tension is a necessary feature accompanying phase separation. If not for the surface tension materials would never part from each other. If the surface energy is smaller then 0 it means that materials like to mix. Now well try to understand the source of surface energy by focusing on phase separation between liquid and gas. Any phase is seeking to minimize its free energy, which has two contributions, energy and entropic terms. Gas phase goes for maximal entropy, liquid state compromises on entropy in order to reduce interaction energy due to attraction forces between molecules. Molecules on the surface do not really belong to any of the phases and have an extra free energy associated with them. E.g. as compared to the molecules in the bulk of liquid, they have smaller amount of neighbors and thus lack some negative attractive interactions. This extra free energy is surface tension. In thermodynamics we defined surface tension α as free energy per unit surface: α = fS /∆S If we create a wave in the water the surface area becomes (by means of differential geometry) s 2 2 Z dh dh S = dxdy 1 + + dx dy 10 How much spare surface have we created? s 2 2 Z Z dh dh ∆S = dxdy 1 + + − dxdy dx dy So far we were accurate, now we come back to physics and make an approximation. Lets say all the waves are small (little distortions), from this follows that we have small angles in the problem. 2 dh << 1 dx 2 dh << 1 dy Now we can use Taylor expansion: ! Z 1 dh 2 1 dh 2 ∆S = dxdy 1 + + −1 2 dx 2 dy ! dh 2 dxdy + dy 2 Z 1 h 2 = dxdy∇ h ≈ Lx Ly 2 λ 1 = 2 Z dh dx 2 Thermal fluctuations create small waves in the liquid. These waves can be measured by means of laser light reflection. They are the size of a few nanometers. Now we make an approximation of contribution of surface energy to the total potential energy of the wave. 2 h Fα → U = αLx Ly λ U ≈ αLx Ly q 2 h2 The total dispersion relation for capillary gravitational waves is ω = gq + α 3 q ρ For qg > αρ q 2 the waves are mostly gravitational → λ2 > 11 α ρg Figure 4: Wave Speed as Function of Wave Number We define capillary length r lc = α ρg For lc < λ the gravitational part is more important, otherwise the capillary part is stronger. √ For gravitational waves: ω ∼ q → u ∼ √1q √ √ For capillary waves: ω ∼ q q → u ∼ q For weak perturbations of the surface h(x; y) = h(r⊥ ) the change in surface energy is: " 2 # Z Z α ∂h 2 ∂h α ∂h 2 ∆Fs ≈ dxdy + = d~rn 2 ∂x ∂y 2 ∂~rn Otherwise the treatment is similar to gravitational waves. In general, both capillary and gravitational effects have to be taken into account. Lets draw the speed of the waves as function of q We can create surface waves only from certain minimal speed u0 . As long as we create slower distortion we will not see capillary waves. There is a minimal surface wave velocity under which waves do not begin to from. For example if we move an object through a pool of water at a very small velocity and star accelerating itll take some time until well see triangle waves behind the object. This effect is similar to Cherenkov Effect in solid states physics. Cherenkov radiation (also spelled Cerenkov or sometimes ?erenkov) is electromagnetic radiation emitted when a charged particle passes through an insulator at a 12 speed greater than the speed of light in the medium. The characteristic ”blue glow” of nuclear reactors is due to Cherenkov radiation. It is named after Pavel Alekseyevich Cherenkov, the 1958 Nobel Prize winner who was the first to rigorously characterize it. 2.4. The connection between soap and waves What will happed if we spill a barrel of soap molecules on a water surface? There is no significant change in surface energy but Surfactant molecules change the conditions on the surface to (almost) sticky boundary conditions. 1 Hence, the viscous losses occur in a thin layer near the surface ∼ (v/ω) 2 . This will cause significant chance in the behavior of waves. This happens because soap molecules at large enough concentration create flat layer of molecules that are strongly connected to each other and their interaction swallows the waves. 2.5 Sources http://en.wikipedia.org/wiki/Cherenkov effect http://www.fluidmech.net/jscalc/waves.htm http://www.galleryoffluidmechanics.com/waves/plageb.htm http://www.claymath.org/millennium/Navier-Stokes Equations 13