Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Electric motor wikipedia , lookup
Portable appliance testing wikipedia , lookup
Audio power wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Mechanical-electrical analogies wikipedia , lookup
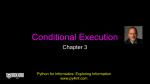
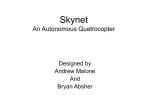
Electrical ballast wikipedia , lookup
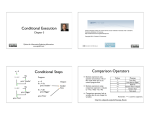
Ground (electricity) wikipedia , lookup
Current source wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Opto-isolator wikipedia , lookup
Induction motor wikipedia , lookup
Power inverter wikipedia , lookup
Electric power system wikipedia , lookup
Electrical substation wikipedia , lookup
Electrification wikipedia , lookup
Three-phase electric power wikipedia , lookup
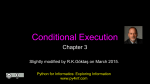
Power MOSFET wikipedia , lookup
Distribution management system wikipedia , lookup
Amtrak's 25 Hz traction power system wikipedia , lookup
Brushed DC electric motor wikipedia , lookup
Surge protector wikipedia , lookup
Voltage regulator wikipedia , lookup
Power electronics wikipedia , lookup
Buck converter wikipedia , lookup
History of electric power transmission wikipedia , lookup
Stepper motor wikipedia , lookup
Rectiverter wikipedia , lookup
Stray voltage wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Power engineering wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Voltage optimisation wikipedia , lookup
Individual Subsystem Testing Report Zero Tilt Frostburg State University Kaetie Combs, Francisco Diaz , Sean Hughes, Jared Hughes, Andrew Huntley, Subhasis Ghosh, Mayowa Ogundipe, Derek Val-Addo, Michael Stevenson, Shaun O’Donnell, Ian Cuddahee, Michael Young, David Wall February 13 2012 RockSat-C 2012 ISTR 1 Mission Overview • Mission Statement: Zero Tilt’s goal is to provide, for the first time, a stable environment throughout the flight of a Sounding Rocket via two concurrent objectives: – Tilt correction system – Despun platform system whs.mil RockSat-C 2012 ISTR 2 Mission Objectives • We plan to: – Counteract the platform spin – Orient the platform parallel to the earth’s surface at all times • We expect to prove that it is possible to correct spin, tilt, and determine the altitude based upon a level reference. • This could benefit any scientific experiment that requires stabilization RockSat-C 2012 ISTR 3 Mission Objectives: Theory and Concepts • The underlying theory and concepts: – negative feedback control systems – concepts of torque and centripetal force – Micro electromechanical systems (MEMS) – Real-Time Systems Theory (for multitasking RockSat-C 2012 ISTR 4 Mission Overview: Mission Requirements • Mission Objectives: – Counter the spin of the rocket during flight. – Keep a level surface to earth using our conceptual design. – Prove successful by using the stored gyroscope output and the feedback from various motors. • Minimum success criteria – Our main goals as the Zero Tilt team is to receive results indicating that we achieved zero tilt for the flight of a sounding rocket. RockSat-C 2012 ISTR 5 Functional Block Diagrams Zero Tilt System Tilt System Power System Despun System shoponline2011.com RockSat-C 2012 ISTR 6 Power Subsystem (Despun) Power Supply: 9 volt Lithiums 24 Volt Total Flash Memory Voltage Regulator 24 to 5 Volts Voltage Regulator 5 to 3 volts De-spin Motor Atmega 32 Processor High G Accelerometer High G Accelerometer RockSat-C 2012 ISTR 7 Power Subsystem (Tilt) Power Supply: 9 volt Lithiums 24 Volt Total Flash Memory Voltage Regulator 24 to 3 volts Voltage Regulator 24 to 6 volts Spin Motor Voltage Regulator 24 to 5 volts Tilt Motor Gyroscope Atmega 32 Processor Low G Accelerometer RockSat-C 2012 ISTR 8 Despun System High G Accelerometer Flash Memory Atmega 32 Processor High G Accelerometer Motorcontroller/Driver Despun Motor RockSat-C 2012 ISTR 9 Tilt System Spin Motor Flash Memory Atmega 32 Processor Tilt Motor Low-G Accelerometer Gyroscope RockSat-C 2012 ISTR 10 Changes from CDR • Decided to consider a new servo motor that has lower power requirements, a faster response time, and more torque. • We are running power wires from slip ring directly onto board due to our decision to limit our turn radius on the tilt platform. • Due to Servo Considerations some minor design changes are being made for placement on Tilt platform. RockSat-C 2012 ISTR 11 Program Management and Team Updates Pictured from left to right: Mayowa Ogundipe, Subhasis Ghosh, Jared Hughes, Ian Cuddahee, Sean Hughes Derek Val-Addo, Andrew Huntley, Kaetie Combs, Michael Stevenson, Francisco Diaz, Michael Young, Dr. Mohammed Eltayeb, Shaun O’Donnell, David Wall RockSat-C 2012 ISTR 12 Schedule Update • We are on schedule electrically and are waiting on the fabrication of mechanical parts to finish testing. • We have shifted the completion of the mechanical tests later because of machining time. • We are focusing our efforts on completing the electrical elements so that we know they will be reliable on the mechanical layout. • Our main concern is completing our mechanical fabrication so we can finish testing. RockSat-C 2012 ISTR 13 Subsystem Overview • Subsystems – Electrical • Discussion by Mayowa Ogundipe, and Derek Val-Addo – Power • Discussion by Andrew Huntley, Jared Hughes, and Sean Hughes – Mechanical • Discussion by Shaun O’Donnell, and David Wall nisd.net RockSat-C 2012 ISTR 14 Electrical Subsystem Update • Status – What is complete/what has been tested? – What has not yet been checked out? RockSat-C 2012 ISTR 15 Electrical Subsystem Update (Continued) RockSat-C 2012 ISTR 16 Electrical Subsystem Update • What were the results? – We were able to collect gyroscope and accelerometer data. (dps for gyroscope, and voltage for the accelerometer) – We were able to convert dps to degrees for the Gyroscope and voltage to g’s for the accelerometer. – We were able to program the servo motor to react to changes in degree measure read from the gyroscope, either positive or negative. lochnessproject.org RockSat-C 2012 ISTR 17 Power Subsystem Update • Status – What is complete/what has been tested? – What has not yet been checked out? RockSat-C 2012 ISTR 18 Power Subsystem Update Power Requirements Device maximum Current drawn(mA) Max Operating Operating Voltage(V) Voltage Total Current drawn(mA/H) number Maximum power dissapation(W) Atmega 32 1.1 2.7-5.5 5.5 2 2.2 0.0121 High-G Accelerometer ADXL278 2.9 5(+-5%) 5 2 5.8 0.029 Low-G Accelerometer ADXL203 1.1 5 5 1 1.1 0.0055 Motor Controller TB6585FG 14 4.7 4.7 1 14 0.0658 Voltage Regulator MAX3379 0.3 1.2-5.5 5.5 7 2.1 0.01155 Gyroscope L3G3200D 6.1 2.4-3.6 3.6 1 6.1 0.02196 5 2.7-3.6 3.6 2 10 0.036 150 4.8-6 6 1 150 0.9 2000 24 24 1 2000 48 230 4.8-6 6 1 230 1.38 2421.3 50.46191 Flash memory AT26DF161A Motor 2 HS145CR Motor 0 3268...BX4 SC Motor 1 HS-5245MG Total Lithuim Batteries Alkaline ENERGIZER LA522 Current provided 27003400mA/hr 18002600mA/hr 1000 mA Continous Current Weight Voltage Total Batteries 15 1.5 16 23 1.5 16 33.9 grams 9 6 RockSat-C 2012 ISTR 19 Mechanical Subsystem Update • Status – What is complete/what has been tested? – What has not yet been checked out? RockSat-C 2012 ISTR 20 Mechanical Subsystem Update • Discussion of current mechanical objectives including machining schedule, tilt platform construction, and slip ring mounting RockSat-C 2012 ISTR 21 Plan for Subsystem Integration RockSat-C 2012 ISTR 22 Lessons Learned • Subsystem testing requires rigid time restraints and an understanding of the time required to complete tasks. Taking into account setbacks and off-ramps. Designing a system would benefit also from an understand as to how it will be constructed. Engineering tasks are best approached by assigning specific tasks and deadlines to groups so that any dependencies can be accounted for. • If we started this project over we would ensure more carefully that the pieces selected could perform their designated tasks. We would also assign more ambitious deadlines and complete dependent items in a more time efficient manner. • So far, by designating tasks we have been able to work ahead in certain areas and share discoveries with the entire team. We have class discussions and demonstrations that function as learning tools for all of us. http://sparetimeuniversity.com/?page_id=153 RockSat-C 2012 ISTR 23 Conclusions In conclusion we hope to get up to speed with our mechanical subsystem. We intend to continue work with the electrical system and iron out Flash memory requirements and PCB board layouts so they will be ready for the Systems Integration Testing. We need to more extensively test power and ensure that our new selected batteries can supply the current and voltage needed. RockSat-C 2012 ISTR 24