Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Centripetal force wikipedia , lookup
Uncertainty principle wikipedia , lookup
Symmetry in quantum mechanics wikipedia , lookup
Laplace–Runge–Lenz vector wikipedia , lookup
Gibbs paradox wikipedia , lookup
Relativistic quantum mechanics wikipedia , lookup
Brownian motion wikipedia , lookup
Quantum vacuum thruster wikipedia , lookup
Photon polarization wikipedia , lookup
Accretion disk wikipedia , lookup
Classical mechanics wikipedia , lookup
Elementary particle wikipedia , lookup
Equations of motion wikipedia , lookup
Work (physics) wikipedia , lookup
Angular momentum wikipedia , lookup
Angular momentum operator wikipedia , lookup
Center of mass wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Classical central-force problem wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Specific impulse wikipedia , lookup
Atomic theory wikipedia , lookup
Relativistic angular momentum wikipedia , lookup
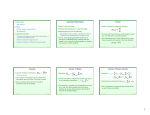
Physics 201 8: Linear Momentum and Collisions •Linear Momentum and its Conservation •Impulse and Momentum •Collisions •Elastic and Inelastic Collisions in One Dimension •Two Dimensional Collisions •The Center of Mass •Motion of a System of Particles •Rocket Propulsion Linear Momentum and its Conservation Linear momentum p = mv Newtons Second law dv dp F tot = ma = m = dt dt (if the mass is constant closed system ) dp \ F tot = 0 =0 dt p = CONSTANT Dp = 0 F12 1 2 F21 By Newtons Third Law F12 = F21 If we consider the two objects as ONE composite object, then the total force on the composite object F tot = F 12 F21 = 0 DP tot = 0 = Ptot, f P tot,i P tot, f = P tot,i P tot = P1 P 2 P1, f P 2, f = P 1,i P 2,i Impulse and Momentum dp= Fdt dp = Dp= Fdt =I I is called the Impulse of the force I= F dt =area under force versus time gra Dp I F= = Dt Dt Collisions Basic Assumption Forces during the collision dominate all other forces present, so only they need be considered This assumption implies that only contact forces between the objects are important , i.e. that the system is closed This in turn implies that the Total Linear Momentum of the system is conserved Dptot = 0 Perfectly Inelastic Collisions The two particles stick together after the collision v1f = v 2f Thus using Dptot = 0 in one dimension m1 v1i m 2v 2i = m1 v f m 2v f = v f (m1 m 2) m1 v1i m 2v 2i vf = (m1 m2 ) Elastic Collisions both Momentum ANDKinetic Energy are conserved m 1 v 1i m 2 v 2i = m1 v1f m 2v 2f 1 1 1 1 m1 v1i2 m 2 v 22i = m 1v 1f2 m 2 v 22f 2 2 2 2 1 m v 2 v 2 = 1 m v 2 v 2 1 ( 1i 1f ) 2 ( 2f 2i ) 2 2 m1 (v1i v 1f )(v1i v1f ) = m 2 (v 2f v 2i )(v 2f From conservation of total momentum(1) eq. m v v1f ) = m 2 (v 2f v 2i ) 1 ( 1i \ (v1i v 1f ) = (v 2f v 2i ) v1i v 2i = (v1f v 2f ) (1) (2 ) v 2i ) Two Dimensional Collisions d=impact parameter use Dp = 0 for all collisions and DK = 0 for elastic collisions where p = mv 1 2 and K = m v 2 can always choose a frame of reference in which one of the particles is at rest and the moving particles trajectory to be the x - axis The Center of Mass In a system of two or more particles, the system moves as though all the mass were concentrated at a point.That point is called the center of mass . m r 1 r = = mr M m m (x i y j z k) 1 x i y j z k = m (x i y j z k) = M m k k k =1,n cm k k k =1,n k k =1, n k k k k k =1,n cm cm cm k k k =1, n k =1,n k k k Center of mass of extended objects 1 rcm = M 1 rdm= M object rr(r)dr; r = (x,y,z);; dr =dxdydz object dm r(r) = ; M= dV dm object c 1 xcm = M 1 xr(r)dr; ycm = M object 1 yr(r)dr; zcm = M object zr(r)dr object Motion of a System of Particles drcm d 1 v cm = = dt dt M 1 1 m k r k = mkvk = M M k k ptot i.e. v cm = ptot = M vcm M similarly d 1 a cm = = dt dt M dvcm k 1 m k v k = M k 1 mkak = M Ftot i.e. a cm = F tot = M acm M ptot pk = M F tot k k Fk = M The effect of an external force is to change the momentum of the entire system. If the external force is zero the system maintains a zero or constant velocity and the total momentum of the system is conserved Rocket Propulsion A rocket is a system with mass M moving at a velocityv . When the gases are expelled with exhaust velocity v e , then the rocket changes its velocity by d v . Thus through conservation of momentum M dv = vedM M v i = ( M - d M ) v f d M v e M d v = v d M if M > > d M e dv = ve dM M M D v = v e ln i M f Thrust: F = M dv dM = ve dt dt