Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Mercury-arc valve wikipedia , lookup
History of electric power transmission wikipedia , lookup
Stray voltage wikipedia , lookup
Utility frequency wikipedia , lookup
Power inverter wikipedia , lookup
Voltage optimisation wikipedia , lookup
Electrical ballast wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Current source wikipedia , lookup
Ground loop (electricity) wikipedia , lookup
Distributed element filter wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Television standards conversion wikipedia , lookup
Chirp spectrum wikipedia , lookup
Two-port network wikipedia , lookup
Three-phase electric power wikipedia , lookup
Mains electricity wikipedia , lookup
Integrating ADC wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Amtrak's 25 Hz traction power system wikipedia , lookup
Opto-isolator wikipedia , lookup
Wien bridge oscillator wikipedia , lookup
Alternating current wikipedia , lookup
Current mirror wikipedia , lookup
HVDC converter wikipedia , lookup
Phase-locked loop wikipedia , lookup
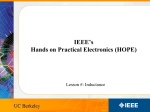
The Effect of Ripple Steering on Control Loop Stability for a CCM PFC Boost Converter Fariborz Musavi, Murray Edington Department of Research, Engineering Delta-Q Technologies Corp. Burnaby, BC, Canada [email protected], [email protected] Abstract—In this paper, an average switch model approach to the power stage modeling, feedback compensation and dynamic analysis of PFC boost converters with coupled magnetic filter is presented. The model is expressed by derivation of power stage transfer functions for a conventional boost converter, and then followed by the power stage transfer functions for a PFC boost converter with coupled magnetic filter. Experimental and simulation results of a prototype boost converter converting universal AC input voltage to 400 V DC at 1.8 kW are given to verify the proof of concept, and analytical work reported. The experimental results demonstrate that the model can correctly predict the steadystate and large signal dynamic behavior of a CCM PFC boost converter with coupled magnetic filter. I. INTRODUCTION Coupled magnetics filter techniques, known also as ripple steering techniques [1], have existed for many years, and have been applied to several topologies [2, 3]. As shown in Figure 1, this technique replaces a series smoothing inductor with a pair of coupled inductors and a blocking capacitor. The circuit works by allowing the DC component of the input current to pass through the series winding, at the input, while the high frequency ripple component is filtered by steering it through the additional coupled inductor and capacitor combination. 1 Wilson Eberle, 2 William G. Dunford Department of Electrical and Computer Engineering University of British Columbia | 1 Okanagan | 2 Vancouver 1 Kelowna, BC, Canada | 2 Vancouver, BC, Canada 1 [email protected] | 2 [email protected] complexity, especially in its differential filtering section, which includes Cx capacitors and differential mode inductors. Reducing the Cx capacitors to a minimal size has an additional benefit for applications with tight specifications on standby power consumption. Cx capacitors cause a considerable reactive current to flow through the filter, which is a source of additional and unwanted loss. Furthermore, with ripple steering, the discharge resistor that must be placed in parallel to Cx for safety reasons can be higher. As a result, both losses are minimized. With ripple steering, the control strategy for the PFC stage is similar to that of a conventional boost converter, but the power stage transfer functions are different. This paper proposes a model to verify the effect of the added coupled filter to the power stage transfer functions, which can be used to design the feedback loop compensation. Figure 2. Modified PFC boost converter with coupled inductors. II. Figure 1. Smoothing transformer in a coupled filter. AVERAGE SWITCH MODEL A Model for the PWM-switch was first introduced in [6, 7]. It was then adopted for different converters in [8-12]. For the average switch model of a converter, the active and passive switches shown in Figure 3 are replaced with the PWM-switch equivalent circuits shown in Figures 4 and 5. Ripple steering for PFC boost converters has been presented in [4, 5]. Figure 2 illustrates the modified PFC boost converter with a coupled inductor. The ripple-steering technique has several advantages in a PFC boost converter. Since it eliminates most of the differential-mode conducted noise, it enables the reduction in EMI filter size and Figure 3. One active switch and one passive switch. This work has been sponsored and supported by Delta-Q Technologies Corporation. Figure 7. Circuit of coupled inductors. Figure 4. PWM-Switch. (4) (5) (6) From above equations, Figure 7 can be replaced with its equivalent circuit shown in Figure 8 [2]. Figure 5. PWM-Switch with dependant voltage and current sources. Applying this model to a modified boost converter with coupled inductors, any of the transfer functions between the output variables (output voltage and inductor current) and the input variables (input voltage and duty ration) can be derived. Applying the PWM switch model results in the equivalent circuit shown in Figure 6, and by application of superposition and circuit theory, the power stage transfer functions can be derived: . . (1) . Figure 8. Equivalent circuit of coupled inductors. The equivalent circuit of coupled inductor can be modeled as: (7) (8) . . . (2) . The low voltage loop cut off frequency of around 10 Hz is well below the LB×Co resonant frequency (around 125 Hz), so the voltage loop transfer function can be approximated by: (3) .∆ . . Figure 9. Modified boost converter with coupled inductors. Figure 9 shows the equivalent circuit of boost converter with a coupled inductor, where active and passive switches are replaced by the averaged model of PWM switch. By application of superposition and other circuit theory, the power stage transfer functions can be derived: . Figure 6. Conventional boost converter with PWM switch. III. . . PWM SWITCH MODEL OF BOOST CONVERTER WITH COUPLED INDUCTOR In order to model the boost converter with coupled inductors, the winding arrangements shown in Figure 7 can be described mathematically by: . . . . . (9) . . 1 . (10) 3 2 . 2 1 . 2 2 . 1 3 (11) The voltage loop transfer function approximation is also valid here, enabling (10) to be simplified as (3). Figure 10 shows the Bode plot of current loop transfer functions for the modified boost converter with coupled inductor and a conventional boost converter. 75 The open loop bode plot is given in Figure 13. As it can be seen, at cross over frequency, the open loop has a phase margin of 65°, providing for a stable design. 75 0 50 − 25 25 − 60 0 − 90 − 25 − 120 − 50 Conventional Boost Plant Transfer Function Phase and Magnitude − 75 3 1×10 4 Plant Transfer Function Phase and Magnitude − 150 − 150 − 75 10 5 1×10 − 120 Phase (Degree) − 90 0 Magnitude (dB) − 60 25 − 50 − 30 − 30 Modified Boost Plant Transfer Function Phase and Magnitude Phase (Degree) Magnitude (dB) 50 0 Controller Type II Phase and Magnitude 6 1×10 1×10 100 3 1×10 − 180 7 1×10 4 1×10 5 1×10 6 1×10 − 180 7 1×10 Frequency (Hz) Frequency (Hz) Figure 10. Current loop plant Bode plots. LB = 400 µH, Co = 1000 µF, RL = 88 Ω, Ldc = 400 µH, Lac = 250 µH, M = 260 µH, Cs = 1 µF. Figure 11. Current loop plant and Compensator Type II Bode plots. LB = 400 µH, Co = 1000 µF, RL = 88 Ω, R2 = 11.5 kΩ, C2 = 4.7 nF and C3 = 230 pF. As it can be noted that the phase margins for both converters are the same and steady at -90 °. But, the main difference is at the crossover frequencies, where for the conventional boost it is significantly lower. If the same feedback compensation network were to be used for both converters, the steady state and large signal responses would be inadequate for the coupled inductor boost. FEEDBACK COMPENSATION DESIGN A. Current Loop Compensation for the Conventional Boost Converter Figure 11 illustrates the current loop plant and a type II compensator Bode plots. The current loop power stage has a cross over frequency at 10 kHz, so a type II compensator was chosen with a pole and zero, as shown in Figure 12. The compensator has a pole at zero frequency, and another pole at: (12) f C R C and one zero at: f C R C C (13) Figure 12. Type II compensator network. − 90 100 80 − 108 60 40 − 126 20 0 − 20 − 144 Phase (Degree) The compensation is selected so that the open-loop transfer function achieves the following criteria: 1. A high gain at low frequency in order to compensate the steady state error. 2. A gain slope maintained at -20 dB/dec around the crossover frequency in order to ensure enough phase margin and, therefore, closed-loop stability. 3. A very small gain at high frequency in order to reduce the influence of the switching harmonics and overall noise. Magnitude (dB) IV. − 40 − 60 − 80 − 100 3 1×10 Compensated Current Loop Plant (Open Loop) Phase and Magnitude 4 1×10 − 162 5 1×10 − 180 6 1×10 Frequency (Hz) Figure 13. Open loop Bode plot for current loop. LB = 400 µH, Co = 1000 µF, RL = 88 Ω, R2 = 11.5 kΩ, C2 = 4.7 nF and C3 = 230 pF. B. Voltag Loop Compensation for the Conventional Boost Converter The voltage loop transfer function and compensator network Bode plot is given in Figure 14. The compensator 100 − 36 Plant Transfer Function Phase and Magnitude − 72 0 Controller Type II Phase and Magnitude − 20 − 108 Phase (Degree) − 60 25 Controller Type II Phase and Magnitude Modified boost Plant Transfer Function Phase and Magnitude 0 − 40 − 60 − 120 − 150 3 4 1×10 1×10 5 6 1×10 − 180 7 1×10 Frequency (Hz) Figure 16. Current loop plant and compensator Bode plots for boost converter with coupled inductor. RL = 88 Ω, Ldc = 400 µH, Lac = 250 µH, M = 260 µH, Cs = 1 µF, R2 = 22.1 kΩ, C2 = 1 nF and C3 = 150 pF. − 144 − 100 150 − 80 125 10 100 − 180 3 1×10 Frequency (Hz) 100 − 45 75 25 60 − 75 20 − 99 0 − 20 − 126 Phase (Degree) − 72 − 40 − 60 − 160 0 − 25 − 50 Compensated Current Loop Plant (Open Loop) Phase and Magnitude − 140 50 80 40 − 120 100 Magnitude (dB) 1 Figure 14. Voltage loop plant and compensator type II Bode plots. LB = 400 µH, Co = 1000 µF, RL = 88 Ω, R2 = 75 kΩ, C2 = 1 µF and C3 = 100 nF. − 100 10 Compensated Current Loop Plant (Open Loop) Phase and Magnitude 100 1×10 3 4 1×10 1×10 5 − 180 − 200 6 1×10 Frequency (Hz) Figure 17. Open loop plant Bode plot for boost converter with coupled inductor. RL = 88 Ω, Ldc = 400 µH, Lac = 250 µH, M = 260 µH, Cs = 1 µF, R2 = 22.1 kΩ, C2 = 1 nF and C3 = 150 pF. − 153 − 80 − 100 0.1 1×10 100 − 90 Phase (Degree) Magnitude (dB) 50 − 50 10 40 Magnitude (dB) − 30 − 25 60 − 100 0.1 75 0 80 20 0 Phase (Degree) 100 Magnitude (dB) for the voltage is a type II compensator. In the compensator network, the voltage error amplifier gain is adjusted with compensation components to attenuate the double-line frequency ripple on the output capacitor to obtain the desired reduction of the 3rd harmonic THD. C3 sets the reduction level, R2 sets the phase margin to 45 degrees at cross over frequency, and C2 sets the beginning of the phase boost. The desired cross over frequency for voltage loop is around 10 Hz, where the line frequency varies from 50 Hz to 60 Hz. 1 10 100 − 180 3 1×10 Frequency (Hz) Figure 15. Open loop plant Bode plot for voltage loop. LB = 400 µH, Co = 1000 µF, RL = 88 Ω, R2 = 75 kΩ, C2 = 1 µF and C3 = 100 nF. Figure 15 shows the open loop Bode plot of compensated voltage loop. As it can be seen, it has a high gain at low frequencies, and at cross over frequency, the open loop has a phase margin of 55° which is a stable design. C. Current Loop Compensation for Boost Converter with Coupled Inductor Figure 16 shows the current loop plant and a type II compensator Bode plots. The current loop power stage has a cross over frequency at 20 KHz. The open loop Bode plot is given in Figure 17. As it can be seen, at the cross over frequency, the open loop has a phase margin of 50° which is a stable design. D. Voltag Loop Compensation for Boost Converter with Coupled Inductor The voltage loop transfer function approximation is also valid here, so the voltage loop plant transfer function does not change with coupled inductor in a boost converter. As a result, the voltage loop compensation network is the same as in section B. V. SIMULATION RESULTS PSIM simulation was used to verify the feedback loop design for steady state and large signal perturbation. Figure 18 shows the simulation results of boost converter with coupled inductors, converting universal AC input voltage at 240 V to a load at 400 V DC and 1.6 kW. Figure 19 illustrates: Top: The boost inductor current in a conventional boost converter - No Filtering technique. Middle: The boost inductor current with ripple steering technique applied, and Bottom: Series capacitor current in the coupled inductor filter. Figure 20 shows a coupled inductor used. The inductor values are: Ldc = 400 uH, Lac = 250 uH, M = 265 uH and the series capacitor Cs = 1 uF. Figure 18. PSIM simulation circuit for ripple steering ttechnique applied to PFC boost converter. 12 10 8 6 4 2 0 Figure 21. Inductor current Idc ripple at 120 V input and 800 W output Experimental. -2 I(M1_1) 12 10 8 6 4 2 0 -2 I(M1_2) 4 2 0 -2 -4 0.16 0.17 0.18 0.19 0.2 Figure 19. Inductor Current - No Filtering technique (T Top) – Ripple Steering Technique (Middle), Series cap current (Bottom). VI. EXPERIMENTAL RESULLTS Prototypes of the boost converter with ccoupled inductors and conventional boost converter were buuilt to verify the proof-of-concept and analytical work prresented and to benchmark the proposed compensation netw work design. Figure 22. Inductor current Idc ripple at 120 V input and 800 W output Simulation. w the experimental and Figure 21 and Figure 22 show simulation ripple current waveformss in the dc inductor under the following operating conditions: Vin = 120 V, Iin = 15 A, Po = 800 W, Vo = 400 V and 70 kHzz. Figure 23 and Figure 24 show the experimental current waveforms in the ac inductor under the same test condition. w the experimental and Figure 25 and Figure 26 show simulation ripple current waveformss in the dc inductor under the following operating conditions: fsw = 70 kHz, Vin = 240 V, Iin = 15 A, Po = 1600 W and Vo = 400 V. Figure 20. Coupled inductors used in experim mental circuit. Figure 23. Inductor current Iac at 120 V input and 800 W output Experimental. Figure 26. Inductor current Idc ripple at 240 V input and 1600 W output Simulation. ac Inductor Current 8 6 4 2 0 -2 -4 -6 -8 0.17 0.175 0.18 0.185 Time (s) 0.19 0.195 Figure 24. Inductor current Iac at 120 V input and 800 W output Simulation. Figure 25. Inductor current Idc ripple at 240 V input and 1600 W output Experimental. 0.2 Figure 27. Inductor current Iac at 240 V input and 1600 W output Experimental. Figure 28. Inductor current Iac at 240 V input and 1600 W output Simulation. Figure 27 and Figure 28 show the experimental and simulation low frequency current waveforms in the ac inductor under the following operating conditions: fsw = 70 kHz, Vin = 240 V, Iin = 15 A, Po = 1600 W and Vo = 400 V. VII. CONCLUSIONS An averaged PWM model for boost converters with the ripple steering technique has been developed and the effect of ripple steering on the design of the current loop compensation network has been studied. Analytical and simulation results were compared with experimental results for a prototype converter circuit converting the universal AC input voltage to a load at 400 V DC and 1.6 kW. The proposed model shows an accurate prediction of steady state and large transient behavior for the boost converter with coupled inductors. REFERENCES [1] [2] [3] D.C. Hamill ;P.T.Krein, "A `zero' ripple technique applicable to any DC converter " in IEEE Power Electronics Specialists Conference, PESC. vol. 2, 1999, pp. 1165 - 1171. J.W. Kolar ; H. Sree ; N. Mohan ; F.C. Zach, "Novel aspects of an application of `zero'-ripple techniques to basic converter topologies " in Power Electronics Specialists Conference, PESC. vol. 1, 1997, pp. 796 - 803. N.K. Poon ; J.C.P. Liu ; C.K. Tse ; M.H. Pong, "Techniques for input ripple current cancellation: classification and implementation," IEEE Transactions on Power Electronics, vol. 15, pp. 1144 - 1152 2000. [4] J. Wang ; W.G. Dunford ; K. Mauch, "Analysis of a ripple-free inputcurrent boost converter with discontinuous conduction characteristics " IEEE Transactions on Power Electronics, vol. 12, pp. 684 - 694, 1997. [5] E. Chou ; F. Chen; C. Adragna ; B. Lu, "Ripple steering AC-DC converters to minimize input filter " in IEEE Energy Conversion Congress and Exposition, ECCE, 2009, pp. 1325 - 1330. [6] V. Vorperian, "Simplified analysis of PWM converters using model of PWM switch, Part I: Continuous conduction mode " IEEE Transactions on Aerospace and Electronic Systems, vol. 26, pp. 490 496 1990. [7] V. Vorperian, "Simplified analysis of PWM converters using model of PWM switch, Part II: Discontinuous conduction mode," IEEE Transactions on Aerospace and Electronic Systems, vol. 26, pp. 497 505 1990. [8] F. Musavi ; K. Al-Haddad ; H.Y. Kanaan, "A large signal averaged modelling and control of paralleled DC/DC converters with automatic load sharing," in IEEE Applied Power Electronics Conference and Exposition, APEC. vol. 2, 2005, pp. 1353 - 1358. [9] E. Van Dijk ; J.N. Spruijt ; D.M. O'Sullivan ; J.B. Klaassens, "PWMswitch modeling of DC-DC converters " IEEE Transactions on Power Electronics, vol. 10, pp. 659 - 665 1995. [10] Y.W. Lu ; W. Zhang ; Yanfei Liu, "A large signal dynamic model for single-phase AC-to-DC converters with power factor correction " IEEE Power Electronics Specialists Conference, PESC, vol. 2, pp. 1057 - 1063, 2004. [11] Yan-Fei Liu ; P.C. Sen, "Large-signal modeling of hysteretic currentprogrammed converters " IEEE Transactions on Power Electronics, vol. 11, pp. 423 - 430, 1996. [12] Byungcho Choi ; Sung-Soo Hong ; Hyokil Park, "Modeling and small-signal analysis of controlled on-time boost power-factorcorrection circuit " IEEE Transactions on Industrial Electronics, vol. 48, pp. 136 - 142, 2001.