Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Ficus rubiginosa wikipedia , lookup
Holocene extinction wikipedia , lookup
Overexploitation wikipedia , lookup
Introduced species wikipedia , lookup
Extinction debt wikipedia , lookup
Occupancy–abundance relationship wikipedia , lookup
Ecological fitting wikipedia , lookup
Biodiversity action plan wikipedia , lookup
Island restoration wikipedia , lookup
River ecosystem wikipedia , lookup
Habitat conservation wikipedia , lookup
Latitudinal gradients in species diversity wikipedia , lookup
Coevolution wikipedia , lookup
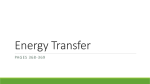
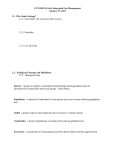
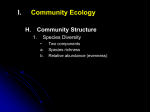
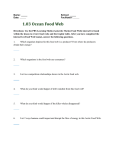
Artif Life Robotics (2002) 6:78-81 9 ISAROB 2002 Takashi Shimada 9 Satoshi Yukawa 9 Nabuyasu Ito Self-organization in an ecosystem Received and accepted: September 27, 2002 A b s t r a c t A n ecosystem, especially a food web, is essentially characterized as a m a n y - b o d y system in which the m e m b e r s interact with each o t h e r u n d e r the limitations of the energy and resources. 1 W e introduce a coevolutional p o p u l a t i o n dynamics m o d e l for food webs which contains energy-conserving interactions, energy dissipation, and rules for changing the degrees of f r e e d o m (extinction and mutation). In this model, the diversity of the system increases spontaneously. T h e statistical p r o p e r t i e s of the system, such as the distribution of the life time of the species, are also discussed. K e y words Ecosystem 9P o p u l a t i o n dynamics 9F o o d webs 9 Evolution - E x t i n c t i o n . M u t a t i o n 9 Self-organization 1 Introduction Since the L o t k a - V o l t e r r a equations were proposed, population dynamics has occupied an i m p o r t a n t position in the study of ecosystems. A l t h o u g h t h e r e are many variations of L o t k a - V o l t e r r a - t y p e models, these can be generalized into the form 2'3 dx i dt - cixi + ~_,aijxixj j (1) where x~, a~j, q represent the p o p u l a t i o n density of the i-th species, the interaction coefficient b e t w e e n the i-th and j-th species, and the intrinsic growth rate, respectively. T h e analysis of this p o p u l a t i o n dynamics and its linearized T. Shimada ( ~ ) 9S. Yukawa 9N. Ito Department of Applied Physics, University of Tokyo, 7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan e-mail: [email protected] This work was presented, in part, at the Sixth International Symposium on Artificial Life and Robotics, Tokyo, Japan, January 15-17, 2001 m o d e l by R. May and others in the 1970s yielded a r e m a r k able harvest. .4 This is the fact that complex systems with strong interactions are m e r e l y stable, which is the o p p o s i t e of the belief at that time. H o w e v e r , it has also b e c o m e k n o w n that the argument of M a y et al. is too strict to prohibit the existence of middle-sized systems with m o d e r a t e interactions. F u r t h e r m o r e , the existence of exceptionally large and strongly interacting systems is also not forbidden. It is also found that such exceptionally large or strongly interacting systems may b e constructed by the trial-andelimination scheme. 7-9 W e now focus on the food web. F o o d webs are the trophic links in ecosystems. Therefore, when using p o p u l a tion dynamics models for ecosystems, one should t r e a t n o t the p o p u l a t i o n but the resource or energy as a the dynamic variables. A s m e n t i o n e d below, this brings a n o t h e r difficulty when trying to m a k e a m o d e l of a food web. A l t h o u g h there are m a n y type of m o d e l s for food webs, 1~ t h e r e has not b e e n a m o d e l in which the system is self-organized f r o m the p o p u l a t i o n dynamics and trial-and-elimination. 2 Model W e now start to construct a m o d e l of a food web from the generalized L o t k a - V o l t e r r a equations (Eq. 1). To give the system a chance to be stable, following the M a y et al. arguments, we set most of the interactions at 0. The average n u m b e r of interactions p e r species is r e p r e s e n t e d as m. Since interactions here are limited to p r e y - p r e d a t o r relations, we also define the interaction coefficients as antisymmetric (aq = -aji). N o t e that the p o p u l a t i o n xi actually refers to the energy or resource in the biomass of the species. It is obvious that the sum of the p o p u l a t i o n is conserved by p r e y - p r e d a t o r interactions. W e then decide that there are single species of plants which have a positive growth rate, and animals which have a negative growth rate. T h e s e conditions c o r r e s p o n d to the p r o d u c t i o n of energy in the plants and energy dissipation by m e t a b o l i s m in animals. T h e trial-elimination scheme is then realized as adding the rules of r a n d o m m u t a t i o n and 79 extinction. New species which have rn totally r a n d o m interactions come randomly. Species whose population becomes very small become extinct and are eliminated from the system. Despite the expectation that the system grows to a rich structure spontaneously, it turns out that this naive modification does not work. Such systems cannot yield a diverse structure, and tend to collapse to a poor structure by mutation and extinction (Fig. 1). The m a i n reason for the failure is a difficulty in deciding suitable values for the interaction coefficients (aij). Since the interaction coefficients have dimensions of time per energy density, they must be distributed over a wide range. For example, the interaction between cows and grass would be represented as far larger than the one between eagles and rats. O n e solution is to decide the proper range for the interaction coefficients according to the trophic levels. However, when we adopt this scheme, we must arrange for the emergence of trophic levels and a large variety of life-styles. Here, we introduce another way, i.e., rescaling the interaction coefficient. In the L o t k a - V o l t e r r a equations, the rate of preying per unit predator is a linear function of the p o p u l a t i o n of the prey. W e modify this preying rate to a function of the ratio of the populations of the prey (j) and the predator (i) as where the size of )~ corresponds to the saturation of the preying rate. This preying rate (Eq. 2) yields the interaction term trophie level 3 ;';". energyflow t r g y flow ~ Fig. 1. An example of the trivial star-like structure which is yielded by simple Lotka Volterra-type interactions. Systems tend to collapse to such structures or totally die out Fig. 3. Time-development of the number of species in the system. The mutation rate is 0.1 per time interval. The four lines represent the total number of species, the species in the second trophic level, the species in the first trophic level, and the species in the third trophic level, in order from the top to the bottom, respectively trophic level 1 Fig. 2. An example of a self-organized food web with a rich structure. Species are represented as circles. Each a r r o w represents a preying interaction. There are 21 species and 3 tropic levels 180 160 140 9~ 120 100 80 Z 6O 40 20 0 0 50000 100000 150000 200000 25000.0 300000 350000 400000 450000 500000 Time 80 Fig. 4. Long-time behavior of the system. The upper line represents a system with weak interactions, and the lower line represents a system with strong interactions 1000 i 900 i . . . . . . i t,,,A i-1 ................................................................................................................................................................................... 800 700 i,,,,~!, " " " " " ~ "d i J J J ff~',,J/!~,/%,~' ............ q' ........................ i ......................... i ......................... ~......................... i ......................... i ..................... :;~;f ................. ~'~'t ....................... ........................ i ......................... i ......................... i ......................... i ........... 600 ~ ,,.';~'!s ......................... - ....................... 500 400 ........................ ......................... ............. ....................... i....................'.,t,~i,:~ ....................................................................... .................................................................................................. 300 ......................... :d, i. + " ' l . ~.. ~,,,,:.~',,~ .d," + ,if ;i - !'.v~,'f " ''r ~ '~i~i, .-: .........t ........... 'J~,r ........... :z,~............. ~+,~,~4~,,,,~,,r .............. kb,,,t,,~,~,.~ .................................................. ,'~,,,,,~ ........ ~ ................ - I 200 / /'?~,.,,+vl~- ' ,~'~"-" 100 L,,.~ :~;,~,,+,,~,~L/fL,,,: 0 [,;(i~ " +i I".! . . . . . 0 500000 '" ~' " ' i ..................... i "',~' + . . . . . . . . . . . le+06 " ............. [. . . . . i 1.5e+06 " ~ d' ~,,b'4. t ++ / 3.5e+06 4e+06 + ........... i...... 2e+06 ,7','1 ............................. !..............~Y,,.,,,-I 2.5e+06 3e+06 Time Fig. 5. Distribution of the lifetime of species. The horizontal axis is the number of mutations which a species has endured before it becomes extinct. In the large-number region, power-law behavior is seen le+07 . . . . . . . . . I' 1 . . . . . . . . . . . . . . . . . . . . . . . le+06 100000 \ 10000 + 1000 \i 100 [ 10 1 110 100 1000 10000 100000 N u m b e r of Mutations Before Extinction 1L aijx i ?~ Xy (3) A l t h o u g h k c a n also b e v a r i e d like a o, i n this a r t i c l e w e s e t a u n i f o r m )~ f o r simplicity. I n t h i s case, w e s h o u l d l i m i t t h e u n i f o r m v a l u e ~. i n e (0,1/2) t o k e e p t h e p r e y i n g r a t e c o n v e x under certain transformation of variables. The metabolism r a t e ci is also u n i f o r m , a n d is c h o s e n t o 1 e x c e p t f o r t h e p l a n t s . T h e n t h e t i m e - e v o l u t i o n e q u a t i o n s in o u r m o d e l a r e easily w r i t t e n as Plants dx', dt = Ox,(1 - x,) + ~.aUx~lx} -x j Animals -d~ti = -- X,9 + 2 aq < 0 aijx~i xl]-)' + Z aijx 1-~ i Xy aii > 0 (a+ = - a , / ~ (-1,1t, ~ ~ (0,1/21 a > 0) (4) 81 where G denotes the growth rate of the plants. The condition aq ~ ( - 1 , 1 ) comes from the requirement that not all the animals can survive when the total population of the prey is smaller than the population of the animals. This model has additional rules to change the degrees of freedom of the system, as described below. 2.1 Additional rules - - If the energy of species i (xi) becomes 0 or less, that species is extinct and the i-th degree of freedom is eliminated. In addition to this rule, an instant extinction rule is applied to a species which is completely isolated from others. Mutation (invasion). A new species comes into the system randomly at any time. The initial energy of the newcomer is chosen to be very small (10 8). The number of interactions is decided randomly in the range of (1, 2m), where m is the average number of interactions per species. The amplitudes of the interactions ( a q ) are also decided randomly from a certain distribution P, which is defined in (0,1). when the average number of interactions (m) and the strength of interactions (decided by P) are chosen to be smaller than the value proposed by May et al. (Fig. 4). In cases where interactions are strong, the system diversity goes on fluctuating, and the power spectrum of the number of species shows the 1/f distribution. In the latter case, the distribution of the life-time of the species shows a powerlaw tail (Fig. 5). Extinction. It is worth stressing that we do not require a threshold for extinction. In Lotka-Volterra-type models, populations of unmatched species decrease exponentially, and therefore a threshold is necessary to cause the extinction. 3'9 In contrast, ai~x~ ~x; type interactions cause the algebraic decay of the unmatched species, so the orbits of the unmatched species decrease to 0 in finite time. The irreversibility of the extinction is represented naturally as the breaking of the uniqueness of the solution at xi - 0. 3 Results We now investigate the model described above by a numerical simulation. The parameters in this simulation are chosen as G = 50 and m = 5. A t the starting time there are only plants in the system. This time the system diversity grows gradually by mutations (invasions), although most of the newcomers fail to survive (Fig. 2). To get the structural information, we classify the species by trophic level. Trophic level is defined as the minimum distance to the plants. In other words, the trophic level of the species who eat the plants is one, and the trophic level of the species who do not eat plants and prey on the species whose trophic level is one is two, and so on. In Fig. 3, we can see the development of the food web at trophic levels. We now consider the long-time behavior of the system. The number of the species grows to an infinite number 4 Summary We have introduced a simple model of a food web. In this simple model, the system self-organizes to a rich structure by modifying the interactions as we have demonstrated. Systems with weak interactions grow to an infinite size. Systems with relatively strong interactions continue growing and shrinking. In the present model, we have two essential features: p r e d a t o r - p r e y interactions, and the directionality of the energy flow, which comes from the introduction of an energy source (plants) and energy dissipation. We have seen that the structure is self-organized by these two factors, as same as in real food webs. References 1. Hirata H (1993) Information of organization in ecological systems: nutrient > energy > carbon. J Theor Biol 162:187194 2. Taylor PJ (1988) Consistent scaling and parameter choice for linear and genelized Lotka-Valterra models used in community ecology. J Theor Biol 135:543-568 3. Tokita K, Yasutomi A (1999) Mass extinction in a dynamical system of evalution with variable dimension. Phys Rev E 60:842847 4. May RM (1972) Will a large complex system be satble? Nature 238:413-414 5. Roberts A (1974) The stability of a feasible random ecosystem. Nature 251:607-608 6. Gilpin ME (1975) Stability of feasible predator-prey systems. Nature 254:137-139 7. Tregonning K, Roberts A (1979) Complex systems which evolve towards homeostasis. Nature 281:563-564 8. Roberts A, Tregonning K (1980) The robustness of natural systems. Nature 288:265-266 9. Taylor PJ (1988) The Construction and Turnover of complex community models having generalized Lotka-Valterra dynamics. J Theor Biol 135:569-588 10. Bak P, Sneppen K (1993) Punctuated equilibrium and criticality in a simple model of evolutions. Phys Rev Lett 71:4083-4086 11. Stauffer D, Jan N (2000) Directed Bak-Snepper model for food chains. Int J Mod Phys C 11:147-151 12. Williams RJ, Martines ND (2000) Simple rules yield complex food webs. Nature 404:180-183