Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Public address system wikipedia , lookup
Electric motor wikipedia , lookup
Negative feedback wikipedia , lookup
Opto-isolator wikipedia , lookup
Brushless DC electric motor wikipedia , lookup
Induction motor wikipedia , lookup
Fire-control system wikipedia , lookup
Brushed DC electric motor wikipedia , lookup
Hendrik Wade Bode wikipedia , lookup
Distributed control system wikipedia , lookup
Wassim Michael Haddad wikipedia , lookup
Stepper motor wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Resilient control systems wikipedia , lookup
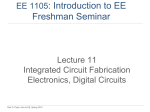
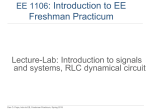
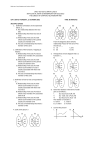
EE 1106: Introduction to EE Freshman Practicum Lecture-Lab 12: Introduction to DC Motors and Control Dan O. Popa, Intro to EE, Spring 2015 Electric Motor Dan O. Popa, Intro to EE, Spring 2015 Electric Motors Dan O. Popa, Intro to EE, Spring 2015 Electric Motor: Electromechanical Model Lorentz Force (EMAG) Faraday’s Law (EMAG), KVL (Electrical) Newton-Euler Law (Mechanical) Dan O. Popa, Intro to EE, Spring 2015 Position/Speed Control + M S1 MOTOR To P1.6 on MSP430 Q1 MPS8098 Dan O. Popa, Intro to EE, Spring 2015 V1 3V H-Bridges • Allows low voltage logic while driving external power to motors. • Easily control current in both directions, allowing motors to move forwards and backwards. • Useful for DC motors, stepper motors, servos, solenoids, etc. Dan O. Popa, Intro to EE, Spring 2015 6 H-Bridges • Each half bridge is a transistor with an enable. Motor Voltage Logic Input Logic Enable Motor Dan O. Popa, Intro to EE, Spring 2015 • LOW Voltage Input Control Logic • HIGH Voltage Output 7 H-Bridge Pinout • • • • • • -EN pins enable output (1 EN pin per pair) -A’s are control inputs -Y’s are outputs -Vcc1 is circuit logic voltage -Vcc2 is the motor supply -Grounds go to ground http://www.ti.com/lit/ds/symlink/l293d.pdf Dan O. Popa, Intro to EE, Spring 2015 8 Full-Bridge with DC Motor Input A Enable + Motor - Input B Dan O. Popa, Intro to EE, Spring 2015 ENABLE Input A Input B Result 1 1 0 Motor turns CW 1 0 1 Motor turns CCW 1 0 or 1 0 or 1 Fast Stop 0 0 or 1 0 or 1 Free Spin 9 Basic Concepts: Control • Machine control refers to a closed-loop feedback system that uses sensory information to control the motion of a machine. A controller accomplishes : – Trajectory tracking – following the prescribed trajectory for the manipulation. – End-point control - reaching a goal configuration in either task or joint space irrespective of the trajectory it is achieved. This is also called the stabilization problem. – Position/velocity control – compensates for errors in knowledge of the systems parameters and suppresses disturbances. Control algorithms can be linear or nonlinear. – Force control – Controlling the force or torque exerted by the motor onto an object in a single or multiple degrees of freedom. Dan O. Popa, Intro to EE, Spring 2015 Position Control of Servo Motor Dan O. Popa, Intro to EE, Spring 2015 Position Control of Servo Motor Transfer function (involves s=jω) Dan O. Popa, Intro to EE, Spring 2015 Torque Control of DC Motor vr = −Rm id Dan O. Popa, Intro to EE, Spring 2015 Feedback System Block Diagram • Automobile Cruise Control Dan O. Popa, Intro to EE, Spring 2015 Feedback System Block Diagram • Temperature control system Dan O. Popa, Intro to EE, Spring 2015 General Control System Block Diagram Dan O. Popa, Intro to EE, Spring 2015 Automatic Control • Control: process of making a system variable converge to a reference value • If r=ref_value=changing - servo (tracking control) • If r=ref_value=constant - regulation (stabilization) • Open loop vs. closed loop (feedback) control r Controller K(s) Plant G(s) + + y r Controller K(s) + Sensor Gain H(s) Dan O. Popa, Intro to EE, Spring 2015 Plant G(s) y Feedback Control • Role of feedback: – Reduce sensitivity to system parameters (robustness) – Disturbance rejection – Track desired inputs with reduced steady state errors, overshoot, rise time, settling time (performance) • Systematic approach to analysis and design – Select controller based on desired characteristics • Predict system response to some input – Speed of response (e.g., adjust to workload changes) • Approaches to assessing stability Dan O. Popa, Intro to EE, Spring 2015 Robots as Complex Systems Controlled by Feedback Robot = an entity that can sense, think and act. Extensions: communicate, imitate, collaborate Classification: manipulators, mobile robots, mobile manipulators. Sense Think Robot Dan O. Popa, Intro to EE, Spring 2015 Act Research in Robotics at Next Gen Systems (NGS) Group http://ngs.uta.edu Tools and Fundamentals Established Technologies Modeling & Simulation Microsystems & MEMS Robotics Control Systems Control Theory Nanotechnology Manufacturing & Automation Algorithms Assistive Robots New applications for robot systems Emerging Technologies Human-like robots Distributed and wireless sensor systems Dan O. Popa, Intro to EE, Spring 2015 Biotechnology Small-scale Micromanufacturing Robotics & Microrobotics Manufacturing Microassembly Micropackaging Sensor & Actuator Arrays NanoManufacturing Final Week Final in-class exam information - Prepare a 3 double-sided page cheat sheet covering material in textbook Chapters 1 through 5 that appears in lecture slides. Topics: 1) Basics of electrical units, basic modules (resistor, sources), 2) Ohm’s Laws, KVL, KCL with independent sources, equivalent resistive networks, 3) Nodal Analysis, Mesh Currents, Thevenin, Superposition, Maximum Power Transfer 4) Nonlinear circuit elements: Transistor, Diode, Op-Amp Final in-lab proficiency exam information - Prepare and review your Vis, Code, procedures for all labs. - Practice wiring up a circuit on breadboard, resistor color code, basic measurements (R, V, I) - Produce your lab notebook for inspection. Dan O. Popa, Intro to EE, Spring 2015 21