Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Scuola Superiore Sant’Anna
Operating Systems - Introduction
Giuseppe Lipari
Fundamentals
• Algorithm:
– It is the logical procedure to solve a certain problem
– Informally specified a a sequence of elementary steps that an
“execution machine” must follow to solve the problem
– not necessarily expressed in a formal programming language!
• Program:
– It is the implementation of an algorithm in a programming
language
– Can be executed several times with different inputs
• Process:
– An instance of a program that, given a set of inputs values,
produces a set of outputs
OS Course - SSSA - 2007
2
Operating System
• An operating system is a program that
– Provides an “abstraction” of the physical machine
through a simple interface
– Each part of the interface is a “service”
• An OS is also a resource manager
– With the term “resource” we denote all physical
entities of a computing machine
– The OS provides access to the physical resources
– The OS provides abstract resources (for example, a
file, a virtual page in memory, etc.)
OS Course - SSSA - 2007
3
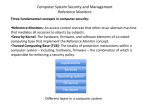
Levels of abstraction
User Level
Kim
Programmer
Level
Web
Browser
System
Level
Lisa
Shell
Bill
Videogame
Printer
Daemon
Interface (System API)
Operating
System
Virtual Memory
Scheduler
Virtual File Sys.
Device Device Device Device Device Device
Driver Driver Driver Driver Driver Driver
HW Level
Main Board
CPU
Keyboard
Network Card
Printer
Video Card
Printer
Hard disk
OS Course - SSSA - 2007
4
Abstraction mechanisms
• Why abstraction?
– Programming the HW directly has several drawbacks
• It is difficult and error-prone
• It is not portable
– Suppose you want to write a program that reads a
text file from disk and outputs it on the screen
• Without a proper interface it is virtually impossible!
OS Course - SSSA - 2007
5
Abstraction Mechanisms
• Application programming interface (API)
– Provides a convenient and uniform way to access to
one service so that
• HW details are hidden to the high level programmer
• Applications do not depend on the specific HW
• The programmer can concentrate on higher level tasks
– Example
• For reading a file, linux and many other unix OS provide the
open(), read() system calls that, given a “file name” allow to
load the data from an external support
OS Course - SSSA - 2007
6
Historical Perspective
• In the beginning was the batch processor
– Huge machines, not very powerful
– Used mainly for scientific computation and military
applications
– Program were executed one at time
• They were called jobs
– Program were simple sequential computations
• Read the input
• Compute
• Produce output
– Non-interactive!
OS Course - SSSA - 2007
7
Batch processor
jobs
Program
Punch
Cards
CPU
Result
• Batch = non-interactive
• The program could not be interrupted or suspended
(non-preemptive)
• Scheduling:
– Priority based (e.g. first the military...)
– FIFO
– Shortest job first (SJF)
OS Course - SSSA - 2007
8
Drawbacks
• CPU was inactive for long intervals of time
– While reading the punch cards, the CPU had to wait
– The punch card reader was very slow
• Solution: spooling
– Use a magnetic disk (a faster I/O device)
– Job were grouped into “job pools”
– While executing one job of a pool, read the next one
into disk
– When a job finishes, load the next one from the disk
– Spool = symultaneous peripheral operation on-line
OS Course - SSSA - 2007
9
Interactivity
• The need for interaction
– For reading input from the keyboard during the
computation
– For showing intermediate results
– For saving intermediate result on magnetic support
• Input/output
– It can be done with a technique called polling
• Wait until the device is ready and get/put the data
• Handshaking
– Again, the CPU was inactive during I/O operations
OS Course - SSSA - 2007
10
Multi-programming
• The natural evolution was “concurrency”
– IDEA: while a job is reading/writing from/to a I/O
device, schedule another job to execute (preemption)
jobs
CPU
Result
Preemption
OS Course - SSSA - 2007
11
Multi-programming
• Multi-programming is very common in real-life
– Consider a lawyer that has many clients
• FIFO policy: serving one client at time, from the beginning
until the court sentence
• In italy, a sentence can be given after more than 10 years.
Imagine a poor lawyer trying to survive with one client for ten
years!
• In reality, the lawyer adopts a TIME SHARING policy!
– All of us adopts a time-sharing policy when doing
many jobs at the same time!
OS Course - SSSA - 2007
12
The role of the Operating System
• Structure of a multi-programmed system
– Who decides when a job is suspended?
– Who decided who is to be executed next?
• In the first computers, these tasks were carried out by the
application itself
• Each job could suspend itself and pass the “turn” to the next
job (co-routines)
• However, this is not very general or portable!
– Today, the OS provide the multiprogramming
services
• The scheduler module chooses which job executes next
depending on the status of the system
OS Course - SSSA - 2007
13
Time sharing systems
• In time sharing systems
– The time line is divided into “slots”, or “rounds”, each
one of maximum length equal to a fixed time
quantum
– If the executing job blocks on a I/O operation, or if the
quantum finishes, it is suspended to be executed
later
jobs
CPU
OS Course - SSSA - 2007
Process
Switch
14
Time sharing systems
• In time sharing systems
– Each process executes approximately as it were alone on a
slower processor
– The OS (thanks to the scheduler) “virtualizes” the processor
• One single processor is seen as many (slower) parallel processors
(one for each process)
– We will see that an OS can virtualize many HW resources
• Memory, disk, network, etc
• Time sharing systems are not predicatable
– The amount of execution time received by one process depends
on the number of processes in the system
– If we want predictable behavior, we must use a RTOS
OS Course - SSSA - 2007
15
Multi-user systems
• The first computers were very powerful and very
expensive
– An university could afford only one mainframe, but
many people needed to access the same computer
– Therefore, the mainframe would give simultanous
access to many users at the same time
– This is an obvious extension of the multi-process
system
• One or more processes for each user
OS Course - SSSA - 2007
16
Multi-user systems
Mainframe
Dumb
Terminal
Dumb
Terminal
Dumb
Terminal
• The terminals had no computing power
– A keyboard + a monitor + a serial line
– Every computation was carried out in the mainframe
– It is like having one computer with many keyboards and
videos
OS Course - SSSA - 2007
17
Multi-user system
• Another dimension was necessary
– The concept of user and account was born
– The first privacy concerns were raised
• Access rules
• Passwords
• Criptography was applied for the first time in a non-military
environment!
– This makes the system more complex!
OS Course - SSSA - 2007
18
Distributed systems
• Finally, distribution was introduced
– Thanks to the DARPA, the TCP/IP protocol was
developed and internet was born
• The major universities in the USA connected their
mainframes
• Mail, telnet, ftp, etc
• The natural evolution was internet and the world wide web
– All of this was possible thanks to
• The freedom of circulation of ideas
• The “liberal” environment in universities
• The need for communication and sharing information
OS Course - SSSA - 2007
19
Distributed systems
• More flexibility
– Client/server architectures
• One server provides “services” to remote clients
• Example: web, ftp, databases, etc
– It is possible to “distribute” an application
• Different “parts” execute on different computers and then
communicate each other to exchange information and
synchronise
• Massively parallel programs can be easily implemented
– Migration
• Processes can “move” from one computer to another to
carry out a certain service
• Examples: agents, videogames, applets, etc
OS Course - SSSA - 2007
20
Classification of Operating Systems
• The OS provides an abstraction of a physical machine
– To allow portability
– To make programmer’s life easier
• The level of abstraction depends on the application
context
– the kind of services an OS provides depend on which kind of
services the application requires
• General purpouses OS should provide a wide range of services to
satisfy as many users as possible
• Specialised OS provide only a limited set of specialised services
– OS can be classified depending on the application context
• General purpouse (windows, linux, etc), servers, micro-kernel,
embedded OS, real-time OS
OS Course - SSSA - 2007
21
Services
• Virtual processor
– An OS provides “concurrency” between processes
• Many processes are executed at the same time in the same
system
• Each process executes for a fraction of the processor
bandwidth (as it were on a dedicated slower processor)
– Provided by the scheduling sub-system
– Provided by almost all OS, from nano-kernels to
general-purpouse systems
CPU
CPU
OS Course - SSSA - 2007
CPU
CPU
22
Services
• Virtual memory
– Physical memory is limited;
– In old systems, the number of concurrent
processes was limited by the amount of physical
memory
– IDEA: extend the physical memory by using a
“fast” mass storage system (disk)
• Some of the processes stay in memory, some are
temporarily saved on the disk
• When a process must be executed, if on the disk, it is
first loaded in memory and then executed
• This technique is called “swapping”
OS Course - SSSA - 2007
23
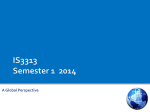
Virtual memory and physical memory
D
A
D
B
E
B
C
E
C
A
CPU
Process A
Process B
•
•
•
Process C
Process E
Process D
Process A
B
B
A
Process E
Process C
D
Virtual memory
Physical memory
Disk
Virtual memory is very large (virtually infinite!)
The program functionality does not depend on the size of the memory
The program performance could be reduced by the swapping
mechanism
OS Course - SSSA - 2007
24
Virtual Memory
• Advantages
– Virtual infinite memory
– The program is not limited by the size of the physical
memory
• Disadvantages
– If we have too many programs, we spend most of the
time swapping back and forth
– Performance degradation!
– Not suitable for real-time systems
• It is not possible to guarantee a short response time
because it depends on the program location
OS Course - SSSA - 2007
25
Virtual File System
• Basic concepts
– File: sequence of data bytes
• It can be on a mass storage (hard disk, cd-rom, etc.)
• It can be on special virtual devices (i.e. RAM disks)
• It can be on a remote system!
– Directory: list of files
• Usually organised in a tree
• Represents how files are organised on the mass storage system
• Virtualisation
– In most OS, external serial devices (like the console or the video
terminal) can be seen as files (i.e. stdin, stout , stderr)
OS Course - SSSA - 2007
26
Virtual file system
• A good virtual file system provides additional features:
– Buffering & caching
• For optimising I/O from block devices
– Transactions
• For example the Reiser FS
– Fault tolerance capabilities
• For example, the RAID system
• Virtual file system is not provided by all OS categories
– Micro and nano kernels do not even provide a file system!
OS Course - SSSA - 2007
27
Privacy and access rules
• When many users are supported
– We must avoid that non-authorised users access
restricted information
– Usually, there are two or more “classes” of users
• Supervisors
• Normal users
– Each resource in the system can be customised with
proper “access rules” that prevent access from nonauthorised users
• For example, the password file should be visible only to the
system supervisor
OS Course - SSSA - 2007
28
Scuola Superiore Sant’Anna
Overview of hardware architectures
Basic blocks
CPU
Main
Memory
Other I/O
devices
BUS
Disk
keyboard
OS Course - SSSA - 2007
Video
30
The processor
• Set of registers
CPU
R0
IP
R1
SP
R2
CR
R3
Execution
Units
–
–
–
–
IP: instruction pointer
SP: stack pointer
A0-A3: general registers
CR: control register
• Execution unit
– Arithmetic unit
– Fetching unit
– Branch prediction unit
• Other components
– Pipeline
– Cache
OS Course - SSSA - 2007
31
Processor registers
• User visible registers
– Used as temporary buffers for processor operations
– Can be in any number
• RISC architectures: array of registers
• CISC architectures: set of registers dedicated to specific operations
• Control and Status registers
– IP
– SP
– CR
Instruction pointer
Stack Pointer
Control Register (or PSW Program Status Word)
OS Course - SSSA - 2007
32
Modes of operation
• Many processors have at least two modes of operation
– Supervisor mode
• All instructions are allowed
• Kernel routines execute in supervisor mode
• The OS must access all features of the system
– User mode
• Not all instructions are allowed
• User programs execute in user mode
• Some instruction (for example, disabling interrupts) cannot be
invoked directly by user programs
• Switching
– It is possible to switch from user mode to supervisor mode with
special instructions
OS Course - SSSA - 2007
33
Main Memory and bus
• The RAM
– Sequence of data locations
– Contains both instructions (TEXT) and data variables
• The bus
– A set of “wires”
• Address wires
• Data wires
– The number of data wires is the amount of bits that
can be read with one memory access
• Current PC buses: 32 bit
OS Course - SSSA - 2007
34
Instruction execution
• We distinguish at least two phases
– Fetching: the instruction is read from the memory
– Execute: the instruction is executed
•
•
•
•
Data processing instr. – the result is stored in registers
Load instr. – the data is loaded from main memory
Store – the data is stored in main memory
Control – the flow of execution may change (change IP)
– Some instruction may be the combination of different
types
Start
Fetch next
instruction
OS Course - SSSA - 2007
Execute
instruction
Halt
35
Stack Frames
Stack
Frame
• The stack is used to
– Save local variables
– Implement function calling
• Every time a function is called
– The parameters are saved on the stack
– Call <address>: The current IP is saved on
the stack
– The routine saves the registers that will be
modified on the stack
– local variables are defined on the stack
– When the function is over the stack is
cleaned and the RET instruction is called
which restores IP
OS Course - SSSA - 2007
y
x
R2
R1
R0
BP
IP
Parameters
Stack
36
External devices
Memory
• I/O devices
– Set of data registers
– Set of control registers
– mapped on certain
memory locations
…
A3B0
A3B2
A3B4
A3B6
A3B8
A3BA
A3BC
BUS
FF00
D0
CR0
FF06
FF02
D1
CR1
FF04
D2
CR2
R0
FF08
CPU
IP
FF0A
SP
R2
CR
I/O device interface
OS Course - SSSA - 2007
R3
R1
37
I/O operations
• Structure of an I/O operation
– Phase 1: prepare the device for the operation
• In case of output, data is transferred to the data buffer
registers
• The operation parameters are set with the control registers
• The operation is triggered
– Phase 2: wait for the operation to be performed
• Devices are much slower than the processor
• It may take a while to get/put the data on the device
– Phase 3: complete the operation
• Usually, cleaning up the control registers
OS Course - SSSA - 2007
38
Example of input operation
• Phase 1: nothing
• Phase 2: wait until bit 0 of CR0 becomes 1
• Phase 3: read data from D0 and reset bit 0 of CR0
BUS
FF00
D0
CR0
FF06
FF02
D1
CR1
FF04
D2
CR2
R0
R0
FF08
CPU
IP
FF0A
SP
R2
CR
R3
I/O device interface
OS Course - SSSA - 2007
R1
39
Example of output operation
• Phase 1: write data to D1 and set bit 0 of CR1
• Phase 2: wait for bit 1 of CR1 to become 1
• Phase 3: clean CR1
BUS
FF00
D0
CR0
FF06
FF02
D1
CR1
FF04
D2
CR2
R0
R0
FF08
CPU
IP
FF0A
SP
R2
CR
R3
I/O device interface
OS Course - SSSA - 2007
R1
40
Temporal diagram
• Polling
– This technique is called “polling” because the
processor “polls” the device until the operation is
completed
– In general, it can be a waste of time
– The processor can executed something useful
while the device is working
– How the processor can know when the device
has completed the I/O operation?
OS Course - SSSA - 2007
41
Interrupts
• Every processor supports an interrupt mechanism
– The processor has a special pin, called “interrupt request (IRQ)”
– Upon reception of a signal on the IRQ pin,
• If interrupts are enabled, the processor suspends execution and
invokes an “interrupt handler” routine
• If interrupts are disabled, the request is pending and will be served
as soon as the interrupts are enabled
Interrupts?
Start
Fetch next
instruction
Execute
instruction
OS Course - SSSA - 2007
Serve
Interrupt
Halt
42
Interrupt handling
• Every interrupt is associated one
“handler”
• When the interrupt arrives
– The processor suspend what is doing
– Pushes CR on the stack
– Calls the handler (pushes the IP on the
stack)
– The handler saves the registers that will be
modified on the stack
– Executes the interrupt handling code
– Restores the registers
– Executes IRET (restores IP and CR)
OS Course - SSSA - 2007
R1
R0
IP
CR
Stack
43
Input with interrupts
• Phase 1: do nothing
• Phase 2: execute other code
• Phase 3: upon reception of the interrupt, read data from
D0, clean CR0 and return to the interrupted code
BUS
FF00
D0
CR0
FF06
FF02
D1
CR1
FF04
D2
CR2
R0
R0
FF08
CPU
IP
FF0A
SP
R2
CR
R3
I/O device interface
IRQ
OS Course - SSSA - 2007
R1
44
Interrupts
• Let’s compare polling and interrupt
Polling
code
Interrupt
handler
Phase 1
Phase 2
Normal
code
Phase 3
OS Course - SSSA - 2007
45
The meaning of phase 3
• Phase 3 is used to signal the device that the
interrupt has been served
– It is an handshake protocol
• The device signal the interrupt
• The processor serves the interrupt and exchange the data
• The processor signal the device that it has finished serving
the interrupt
• Now a new interrupt from the same device can be raised
OS Course - SSSA - 2007
46
Interrupt disabling
• Two special instructions
– STI: enables interrupts
– CLI: disables interrupts
– These instructions are privileged
• Can be done only in supervisor mode
– When an interrupt arrives the processor goes
automatically in supervisor mode
Pending
Interrupt
Interrupt
handler
Normal
code
CLI
STI
OS Course - SSSA - 2007
47
Many sources of interrupts
• Usually, processor have one single IRQ pin
– However, there are several different I/O devices
– Intel processors use an external Interrupt Controller
• 8 IRQ input lines, one output line
BUS
CPU
IRQ
IRQ0
IRQ1
IRQ2
IRQ3
IRQ4
IRQ5
IRQ6
IRQ7
OS Course - SSSA - 2007
I/O
Device
I/O
Device
48
Nesting interrupts
• Interrupt disabling
– With CLI, all interrupts are disabled
• When an interrupt is raised,
– before calling the interrupt handler, interrupts are
automatically disabled
– However, it is possible to explicitely call STI to reenable interrupts even during an interrupt handler
– In this way, we can “nest interrupts”
• One interrupt handler can itself be interrupted by another
interrupt
OS Course - SSSA - 2007
49
Interrupt controller
• Interrupts have priority
– IRQ0 has the highest priority, IRQ7 the lowest
• When an interrupt from a I/O device is raised
– If there are other interrupts pending
• If it is the highest priority interrupt, it is forwarded to the
processor (raising the IRQ line)
• Otherwise, it remains pending, and it will be served when
the processor finishes serving the current interrupt
OS Course - SSSA - 2007
50
Nesting interrupts
• Why nesting interrupts?
– If interrupts are not nested, important services many
be delayed too much
• For example, IRQ0 is the timer interrupt
• The timer interrupt is used to set the time reference of the
system
• If the timer interrupt is delayed too much, it can get lost (i.e.
another interrupt from the timer could arrive before the
previous one is served)
• Losing a timer interrupt can cause losing the correct time
reference in the OS
• Therefore, the timer interrupt has the highest priority and can
interrupt everything, even another “slower” interrupt
OS Course - SSSA - 2007
51
Nested interrupts
High priority
Interrupt handler
Slow Interrupt
handler
Normal
code
OS Course - SSSA - 2007
52
Atomicity
• An hardware instruction is atomic if it cannot be
“interleaved” with other instructions
– Atomic operations are always sequentialized
– Atomic operations cannot be interrupted
• They are safe operations
• For example, transferring one word from memory to register
or viceversa
– Non atomic operations can be interrupted
• They are not “safe” operations
• Non elementary operations are not atomic
OS Course - SSSA - 2007
53
Non atomic operations
• Consider a “simple” operation like
x = x+1;
In assembler
LD R0, x
INC R0
ST x,RO
A simple operation like incrementing a memory
variable, may consist of three machine instructions
If the same operation is done inside an interrupt
handler, an inconsistency can arise!
OS Course - SSSA - 2007
54
Interrupt on non-atomic operations
Handler code
Normal code
int x=0;
...
x = x + 1;
...
void handler(void)
{
...
x = x + 1;
....
}
CPU
R0
01?
x
10
Save registers
...
LD R0, x
INC R0
ST x, RO
...
...
LD R0, x
INC R0
ST x, RO
...
Restore registers
OS Course - SSSA - 2007
Saved registers
0
memory
55
Solving the problem in single processor
• One possibility is to disable interrupts in “critical
sections”
...
CLI
LD R0, x
INC R0
ST x, RO
STI
...
Save registers
...
LD R0, x
INC R0
ST x, RO
...
Restore registers
OS Course - SSSA - 2007
56
Multi-processor systems
• Symmetric multi-processors (SMP)
– Identical processors
– One shared memory
CPU 0
CPU 1
CPU 2
CPU 3
Memory
OS Course - SSSA - 2007
57
Multi-processor systems
• Two typical organisations
– Master / Slave
• The OS runs on one processor only (master), CPU0
• When a process requires a OS service, sends a message to
CPU0
– Symmetric
• One copy of the OS runs indipendentely on each processor
• They must synchronise on common data structures
• We will analyse this configuration later in the course
OS Course - SSSA - 2007
58
Low level synchronisation in SMP
• The atomicity problem cannot be solved by
disabling the interrupts!
– If we disable the interrupts, we protect the code from
interrupts.
– It is not easy to protect from other processors
CPU 0
...
LD R0, x
INC R0
ST x, RO
...
CPU 1
...
LD R0, x
INC R0
ST x, RO
...
...
LD
LD
INC
INC
ST
ST
...
OS Course - SSSA - 2007
R0, x
R0, x
R0
R0
x, R0
x, R0
(CPU
(CPU
(CPU
(CPU
(CPU
(CPU
0)
1)
0)
1)
0)
1)
59
Low level synchronisation in SMP
• Most processors support some special
instruction
– XCH Exchange register with memory location
– TST If memory location = 0, set location to 1 and
return true (1), else return false (0)
void xch(register R, memory x)
{
int tmp;
tmp = R; R = x; x=tmp;
}
XCH and TST
are atomic!
int tst(int x)
{
if (x == 1) return 0;
else {
x=1;
return 1;
}
}
OS Course - SSSA - 2007
60
Locking in multi-processors
• We define one variable s
– If s == 0, then we can perform the critical operation
– If s == 1, the must wait before performing the critical operation
• Using XCH or TST we can implement two functions:
– lock() and unlock()
void lock(int s)
{
int a = 1;
while (a==1) XCH (s,a);
}
void unlock(int s)
{
s = 0;
}
void lock(int x)
{
while (TST (s) == 0);
}
OS Course - SSSA - 2007
61
Locking in multi-processors
CPU 0
CPU 1
L0: TST
JZ
LD
INC
ST
LD
ST
...
s
L0
R0, x
R0
x, R0
R1, 0
s, R1
Lock(s)
L0: TST
JZ
LD
INC
ST
LD
ST
...
s
L0
R0, x
R0
x, RO
R1, 0
s, R1
Lock(s)
x=x+1
Unlock(s)
x=x+1
Unlock(s)
OS Course - SSSA - 2007
TST
TST
JZ
JZ
LD
TST
INC
JZ
ST
TST
LD
JZ
ST
TST
...
JZ
...
LD
s
s
L0
L0
R0, x
s
R0
L0
x, R0
s
R1, 0
L0
s, R1
s
L0
R0, x
(CPU
(CPU
(CPU
(CPU
(CPU
(CPU
(CPU
(CPU
(CPU
(CPU
(CPU
(CPU
(CPU
(CPU
(CPU
(CPU
(CPU
(CPU
0)
1)
0)
1)
0)
1)
0)
1)
0)
1)
0)
1)
0)
1)
0)
1)
0)
1)
62
Locking
• The lock / unlock operations are “safe”
– No matter how you interleave the operations, there is
no possibility that the “critical parts interleave
– However, lock() is an active wait and a possible wast
of time
• The problem of locking is very general
• Solutions will be presented and analysed in
greater details later in the course
OS Course - SSSA - 2007
63