Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Human genetic variation wikipedia , lookup
Gene expression programming wikipedia , lookup
Genetic drift wikipedia , lookup
Biology and consumer behaviour wikipedia , lookup
Quantitative trait locus wikipedia , lookup
Adaptive evolution in the human genome wikipedia , lookup
Dual inheritance theory wikipedia , lookup
Heritability of IQ wikipedia , lookup
Group selection wikipedia , lookup
Polymorphism (biology) wikipedia , lookup
Koinophilia wikipedia , lookup
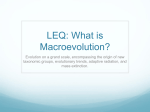
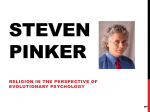
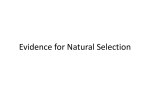
EVOLUTION INTERNATIONAL JOURNAL OF ORGANIC EVOLUTION PUBLISHED BY THE SOCIETY FOR THE STUDY OF EVOLUTION Vol. 57 December 2003 No. 12 Evolution, 57(12), 2003, pp. 2667–2677 THE EVOLUTION OF ENVIRONMENTAL AND GENETIC SEX DETERMINATION IN FLUCTUATING ENVIRONMENTS TOM J. M. VAN DOOREN1,2 1 Section AND OLOF LEIMAR3,4 Animal Ecology, Institute of Biology, Kaiserstraat 63, 2311 GP Leiden, The Netherlands 2 E-mail: [email protected] 3 Department of Zoology, Stockholm University, SE-106 91 Stockholm, Sweden 4 E-mail: [email protected] Abstract. Twenty years ago, Bulmer and Bull suggested that disruptive selection, produced by environmental fluctuations, can result in an evolutionary transition from environmental sex determination (ESD) to genetic sex determination (GSD). We investigated the feasibility of such a process, using mutation-limited adaptive dynamics and individual-based computer simulations. Our model describes the evolution of a reaction norm for sex determination in a metapopulation setting with partial migration and variation in an environmental variable both within and between local patches. The reaction norm represents the probability of becoming a female as a function of environmental state and was modeled as a sigmoid function with two parameters, one giving the location (i.e., the value of the environmental variable for which an individual has equal chance of becoming either sex) and the other giving the slope of the reaction norm for that environment. The slope can be interpreted as being set by the level of developmental noise in morph determination, with less noise giving a steeper slope and a more switchlike reaction norm. We found convergence stable reaction norms with intermediate to large amounts of developmental noise for conditions characterized by low migration rates, small differential competitive advantages between the sexes over environments, and little variation between individual environments within patches compared to variation between patches. We also considered reaction norms with the slope parameter constrained to a high value, corresponding to little developmental noise. For these we found evolutionary branching in the location parameter and a transition from ESD toward GSD, analogous to the original analysis by Bulmer and Bull. Further evolutionary change, including dominance evolution, produced a polymorphism acting as a GSD system with heterogamety. Our results point to the role of developmental noise in the evolution of sex determination. Key words. Adaptive dynamics, canalization, evolutionary branching, sex determination, threshold trait. Received May 12, 2003. Many populations are polymorphic and consist of a small number of distinct morphs. The division into two sexes is by far the most widespread polymorphism, but there are many others, such as the winged and wingless forms in some insect groups. An individual’s morph can be environmentally determined, and thus a case of phenotypic plasticity, but morph determination can also be genetic. It is an issue of general relevance in evolutionary biology to determine the conditions under which either environmental or genetic morph determination is likely to evolve. Our aim here is to investigate this question for the case of the two sexes, using models of the evolutionary dynamics of sex determination. For the sexual morphs, the issue of plasticity versus genetic polymorphism corresponds to environmental sex determination (ESD), with possible polygenic variation, versus major gene genetic sex determination (GSD). In both cases, distinct sexual morphs are present at the phenotypic level, but the manner in which genes and environment affect the alterna- Accepted June 27, 2003. tives differs. Basically, some type of switch between alternative trajectories is needed at a certain point in development. It was noted by Fisher (1930) that GSD can be understood as a polymorphism for a key gene that switches development into one of two alternatives. This general idea has been incorporated into arguments about different forms of polymorphism (e.g., Mather 1955). It can also be that the effects of possible sex genes are small, while environmental cues have prominent effects. Charnov et al. (1976) used the idea of a switch in their reasoning about the evolution of hermaphrodite reproduction versus separate sexes, where they allowed for genetic polymorphism or environmental sensitivity to do the switching. An intermediate system of polyfactorial sex determination is also possible, with comparable contributions from genetic variation and environmental cues (Bull 1983). In the literature on sex determination, several explanations have been put forward for evolutionary transitions between 2667 q 2003 The Society for the Study of Evolution. All rights reserved. 2668 T. J. M. VAN DOOREN AND O. LEIMAR TABLE 1. p e E h(e z E), se z E g(E), sE x(e) xa,b (e) f (e), m(e) bf , b m h̃ (e z E) X(E) F(E), M(E) x9(e) X9(E), F9(E), M9(E) R(x9, x) G(x9, x) Overview of symbols and notation. emigration probability individual environmental variable patch environmental variable probability density and conditional standard deviation of e probability density and standard deviation of E sex-determination reaction norm, probability of becoming a female in environment e sex-determination strategy, which depends on genetic parameters a and b, where a determines reaction norm location, b reaction norm slope competitive ability function ( f , females; m, males) slopes of competitive ability functions distribution of e among candidate parents in patch E proportion females in patch E average competitive abilities in patch E (F, among females; M, among males) mutant sex-determination strategy equivalent to X(E), F(E), and M(E) above, but for mutants x9 average reproductive success of a mutant x9 in a resident population x geometric mean reproductive success of a mutant x9 in a resident population x ESD and GSD. One of them is that there may be genetic variation in traits that differentially favor males and females, for instance, in growth rate. A sex-determining gene tending to produce females could then increase in frequency when closely linked to genes with beneficial effects on females or, in the same way, sex determination could be selected for as a pleiotropic side effect of such genes (Rice 1986). Concerning ESD, Charnov and Bull (1977) suggested that it would appear when there is environmental variation with sufficiently strong differential fitness effects on the sexes— similar to the parental control of sex ratio envisaged by Trivers and Willard (1973). Otherwise, GSD should be expected because of developmental advantages of early sex determination. Bull (1981a) used genetic models to argue that transitions from GSD to ESD could come about in the way suggested by Charnov and Bull (1977), although it has been noted that there may be a tendency for the evolution of sex chromosomes to be irreversible, so that a new mechanism cannot readily evolve (Bull 1983; Bull and Charnov 1985). For the reverse direction, Bulmer and Bull (1982) introduced the idea that a transition from ESD to GSD is possible when ESD leads to excessive fluctuations in the population sex ratio over space or time. When there is variation in environmental conditions differentially favoring males and females, but also larger fluctuations in the population sex ratio than would be warranted from these differential advantages, selection on sex determination traits becomes disruptive, so that genes with major effects on such traits could invade (Bulmer and Bull 1982). Our aim in this paper is to extend the results of Bulmer and Bull (1982) through a more thorough examination of the consequences of stochastic fluctuations for a system of ESD. In particular, we investigate the idea that within-individual variation (Lynch and Walsh 1998), for instance, in the form of developmental noise, could introduce randomness in a switchlike developmental map from environmentally influenced liability to sexual morph, and we examine whether evolution of the degree of randomness can be expected. An important consequence of such randomness would be that it dampens fluctuations in population sex ratios, so that the evolution of appropriate randomness in a switching mechanism could be an alternative to the evolution of GSD. Local fluctuations in patchy environments often play a role in evolutionary explanations of ESD (e.g., Shine 1999). At the same time, the effects of different migration rates on sex determination have hardly been discussed (for an exception, see Reinhold 1998). Whereas Bulmer and Bull (1982) mainly considered the relative magnitudes of within-generation and between-generation environmental variation, we also take into account within-patch and between-patch variation in a metapopulation, allowing an investigation of the effects of different migration rates. DESCRIPTION OF THE METAPOPULATION MODEL Table 1 lists the symbols and notations of the model. Consider a metapopulation with N patches and partial migration, with probability p of leaving the natal patch and entering a dispersal pool. There is no survival cost to dispersal, and dispersers migrate into a randomly chosen patch. In each patch, arriving adults contribute to the production of zygotes in the same way as the local residents. The gametes forming a zygote are drawn from the adult males and females in the patch using a weighted distribution over the parents of either sex. An individual’s weight in the distribution is proportional to its competitive ability. Per patch, a fixed number of K new individuals are formed. Development of individuals into adults occurs in the patch of conception, without any juvenile mortality, and the adult’s sex is determined by a combination of its individual environment and certain of its traits. These traits correspond to the sex-determination strategy. An individual’s external environment during development is assumed to influence the adult competitive ability. In our model, competitive abilities are functions, m(e) for males and f(e) for females, of an individual environmental parameter e (e.g., e could be food supply during development). The parameter e is randomly drawn from a distribution that depends on a patch environmental parameter E, and we write the conditional distribution as h(e z E). For each new generation, E is randomly drawn from the distribution g(E), independently for each patch, corresponding to patch level fluctuations over space and time. When male and female competitive abilities differ in their dependence on e, sex-determination strategies can also become dependent on that environmental variable 2669 EVOLUTION OF SEX DETERMINATION (Charnov and Bull 1977). We write such a strategy as a function x(e) and interpret it as the probability of becoming a female in environment e. It is the evolution of such phenotypes or reaction norms x(e) that we aim to investigate. Shaw-Mohler Fitness Function One feature of our model that greatly simplifies the analysis is that, for a given resident sex determination strategy, the distribution of individuals over sexes and competitive abilities in the next generation will not depend on the state of the population in the current generation. We assume that both the number of patches N and the patch population sizes K are very large and consider a point in time after migration but before reproduction. Note first that the distribution of the individual environmental parameter e among the adults competing for reproduction in a patch with parameter E is given by h̃(e z E ) 5 (1 2 p)h(e z E ) 1 p E h(e z V )g(V ) dV. (1) The reason for the expression is that a proportion (1 2 p) of the individuals stayed in the patch and a proportion p migrated. Integration is over the range of the environmental variable E. When all individuals use strategy x, the proportion of females in a patch with parameter E is E X(E ) 5 x(e)h̃(e z E ) de, (2) and the average competitive ability among the females in the patch is F(E ) 5 1 X(E ) E f (e)x(e)h̃(e z E ) de. (3a) Similarly, the average competitive ability among the males is M(E ) 5 1 1 2 X(E ) E m(e)[1 2 x(e)]h̃(e z E ) de. (3b) Consider an individual using a rare mutant strategy x9. When it has developed in individual environment e and attempts to reproduce in a patch with parameter E, the expected genetic contribution of that individual to the pool of next generation zygotes will be equal to R(x9, x z e, E ) 5 5 1 f (e) 1 x9(e) 2 F(E ) X(E ) 6 m(e) 1 1 [1 2 x9(e)] . M(E ) 1 2 X(E ) (4) The logic behind this expression is that the mutant individual first has its sex determined by the strategy x9(e) and, after either migrating or staying, eventually reproduces in a patch with parameter E. At reproduction, the expected genetic contribution to the pool of next generation zygotes depends on the individual’s competitive ability relative to the average competitive ability of the other adults of the same sex in the patch and on the patch sex ratio. The factor one-half is present because the individual contributes only one of the two gametes that form a zygote. To obtain the expected reproductive success of a random mutant individual reproducing in the patch, we must integrate equation (4) over the distribution (1) of individual environment e, which leads to R(x9, x z E ) 5 5 E R(x9, x z e, E )h̃(e z E ) de 5 6 1 F9(E )X9(E ) M9(E )[1 2 X9(E )] 1 . 2 F(E )X(E ) M(E )[1 2 X(E )] (5) In this expression, the primes denote quantities referring to the mutant strategy, such that F9(E )X9(E ) 5 M9(E )[1 2 X9(E )] 5 E E f (e)x9(e)h̃(e z E ) de and m(e)[1 2 x9(e)]h̃(e z E ) de, (6) (7) corresponding to equations (3a, b). A rare mutant gene will occur predominantly in heterozygous genotypes, so the mutant strategy x9 should be the phenotype of such a genotype. By integrating over the distribution of patch environments E, we get the overall average mutant reproductive success: R(x9, x) 5 E R(x9, x z E )g(E ) dE. (8) The relative rate of increase of the frequency of the mutant gene, when small, is given by the logarithm of R(x9, x). Provided that gene flow from interpatch migration keeps the frequency of the mutant gene spatially homogeneous, we can regard log[R(x9, x)] as the invasion fitness of the mutant (Metz et al. 1992). However, for very low rates of migration gene frequencies may differ between local populations, and it is not clear that (8) can be used to form an invasion fitness. For the special case of no migration (p 5 0), each subpopulation evolves independently in a temporally fluctuating environment, and we should use geometric mean reproductive success to evaluate the possibility of mutant invasion (Lewontin and Cohen 1969). Thus, G(x9, x) 5 E log[R(x9, x z E )]g(E ) dE (9) is an appropriate invasion fitness when p 5 0. As is often the case in simple models with two sexes, our expression (5) has the Shaw-Mohler form (Shaw and Mohler 1953; Charnov 1982; Lessard 1989; Pen and Weissing 2002), where the contribution of a strategy to the next generation is expressed using a sum of ratios of functions of male and female traits. For the special case of full migration (p 5 1), our model corresponds to several previous models aimed at studying ESD (e.g., Bull 1981b; Charnov and Bull 1985, 1989). With zero migration, our model becomes equivalent to a model for a single population with environmental fluctuations within and between generations. 2670 T. J. M. VAN DOOREN AND O. LEIMAR Selection Gradient and Product Rule A traditional way to analyze sex allocation equilibria would be to use equations like (8) or (9) directly. Since R(x, x z E) 5 1, a mutant phenotype x9 can or cannot invade a resident x depending on whether log[R(x9, x)] or G(x9, x) is greater or smaller than zero. We can get additional insight into the nature of the evolutionary stability of genetically monomorphic equilibria by focusing on gradual evolutionary change. For this purpose, we make use of a first-order Taylor expansion of invasion fitness for x9 close to x, an adaptive dynamics approximation (Dieckmann and Law 1996; Metz et al. 1996; Geritz et al. 1998). For x9 close to x, selection will be weak and a mutant gene frequency will be spatially homogeneous also for small values of p. Thus, in the limit of very weak selection, equation (8) provides a valid basis for invasion fitness for any p . 0. For the case of no migration (p 5 0) we should use (9) as invasion fitness. However, as we will see below, (8) and (9) give the same equilibria under gradual evolutionary change, so there will be continuity of equilibria as p approaches zero. We assume that x(e) is a function that depends on the environment e and a limited number of genotypic parameters (but suppress these arguments as much as possible not to clutter notation). If c9 denotes such a parameter of the mutant reaction norm, the partial derivative of R(x9, x z E) in (5) with respect to c9 equals ]R(x9, x z E ) 1 5 ]c9 2 E 5 ]x9(e) f (e) m(e) 2 ]c9 F(E )X(E ) M(E )[1 2 X(E )] 3 h̃(e z E ) de. 6 (10) For the functions we used, continuity properties of x, f, m, and h̃ always allowed differentiation under the integral sign. We obtain the selection gradient sc on c by evaluating the derivative of invasion fitness at c9 5 c, where c is the resident parameter value. Since R(x, x z E) 5 1, both log[R(x9, x)] from (8) and G(x9, x) from (9) give the same expression, sc 5 E ) ]R(x9, x z E ) ]c9 g(E ) dE, (11) c95c for the selection gradient. Because of its special form in models with fitness of the Shaw-Mohler type, the selection gradient (11) can be written as the derivative of a function on phenotype space. For our model such a function is P(x) 5 1 2 E log{F(E )X(E )M(E )[1 2 X(E )]}g(E ) dE, (12) ]P(x) . ]c Sex-Determination Function We modeled sex-determination phenotypes using a family of sigmoid functions, xa,b(e), of the individual environmental variable e, and with two genotypic parameters, a and b. These give the value (a) of the environmental variable where the probability of becoming a female equals one-half, and the slope (b) of the reaction norm at that point (see Fig. 1 for some examples). As sigmoid functions with these properties, we used x a,b (e) 5 F[Ï2p b(e 2 a)], (14) where F(z) is the cumulative distribution of a standard normal variate. We can interpret equation (14) as a threshold trait with discrete developmental responses to a continuously varying liability (Lynch and Walsh 1998). Thus, we can regard y 5 a 2 e 1 d as the realized liability to become male, with the threshold for alternative sexes located at y 5 0. This liability has genotypic or breeding value a in environment e 5 0, and e and d are deviations in the liability due to external individual environment (e) and within-individual random developmental noise (d). When d is normally distributed with standard deviation sd 5 (Ï2p b)21, we obtain the reaction norm (14). Parameter b measures the extent of canalization, that is, when b increases, the relative contribution of developmental noise in sex determination decreases. In line with the interpretation that reduced variance of developmental noise corresponds to a better buffering of a trait (Gibson and Wagner 2000), we say that a high value of b implies more canalization. For our reaction norm specifying probabilities of discrete developmental alternatives, high canalization at the liability level corresponds to a switchlike reaction norm and thus implies high sensitivity to an external environmental factor at the level of the sex ratio probabilities. This is somewhat different from the idea of canalization of morphological traits with a unimodal distribution, where developmental buffering always decreases the environmental sensitivity (Rendel 1967). RESULTS since one readily verifies that sc 5 When evolutionary equilibria can be found by maximizing some product of male and female traits, one often refers to this a product rule (MacArthur 1965; Charnov 1982). In our case, P(x) is the expected value of the logarithm of a product, which can be seen as a generalized product rule (see Leimar 2001). It is important to note that the product rule (12) only applies to gradual evolutionary change in a genetically monomorphic population and does not decide the issue of whether a genetic polymorphism can evolve. (13) It follows that gradual evolutionary change can be understood as a hill-climbing process that increases P(x) over the trait space of genotypic parameters. Hill climbing also occurs when the reaction norm is studied as an infinite-dimensional functional trait, where sex-determination probabilities x(e) per environment evolve independently (O. Leimar, T. J. M. Van Dooren, and P. Hammerstein, unpubl. data). We studied the evolution of parametric reaction norms xa,b of the form (14), in the two-dimensional trait space given by the parameters a and b. We made use of the fitness gradient (sa, sb) from equations (11) or (13) to determine directions in which evolutionary change can occur. We ignored the evolution of competitive ability traits, assuming these to be fixed by stabilizing selection or constraints. As competitive ability functions, we used m(e) 5 am 1 bme and f(e) 5 af 1 bfe. In all examples, females have higher competitive abilities than males for positive e and vice versa for negative e EVOLUTION OF SEX DETERMINATION 2671 (bf . 0 and bm , 0). Negative values of m and f and values larger than one were replaced by zero and one, respectively. With m and f between zero and one, we can interpret them as the probability of succeeding when an opportunity to become parent arises. For these competitive ability functions, female-biased sex ratios can be advantageous at positive values of e, which corresponds to the form (14) of the reaction norm. We have used normal distributions for the patch environmental variable E and the individual external environment e. The patch variable has expected value equal to zero and standard deviation sE and, conditional on the patch variable E, the individual environment e has expected value E and standard deviation sezE. The unconditional variance of e then is the sum of the two variances, s2E 1 s2ezE . As a choice of scale, we kept the sum equal to two and considered the relative contributions from within- and between-patch variation to total environmental variance. Convergence Stable Reaction Norms We calculated the fitness gradient with respect to the parameters a and b numerically, to determine convergence stable reaction norm strategies (Eshel and Motro 1981; Eshel 1983; Christiansen 1991). These are strategies where the fitness gradient equals zero for all strategy parameters and where gradual evolution from nearby strategies converges toward the stable strategy. In our model, convergence stable parameter values (a*, b*) correspond to local maxima of the function P(xa,b) in (12), regarded as a function on the parameter space. Such a point (a*, b*) will attract gradual evolution starting from any point (a, b) on that peak of P(xa,b), which means that (a*, b*) will be absolutely convergence stable (Leimar 2001). For the cases we investigated, the function P(xa,b) was single-peaked with a unique global maximum. Figure 1 illustrates that the convergence stable reaction norm changes from being relatively flat for migration probability close to p 5 0 to an abrupt sex-determination switch when the population is completely mixing (p 5 1). A completely flat reaction norm is the classical Fisherian solution, with 50% allocation to each sex in any environment e (Fisher 1930). An abrupt switch corresponds to the results of Charnov and Bull (1989) for continuous patchiness, which are analogous to the results of Trivers and Willard (1973) on sex allocation, in that a single sex is produced on either side of a threshold value. The switch is located at e 5 0 (Fig. 1), which is the value of the environmental variable where the competitive ability functions of the sexes cross. For low to intermediate values of p, there is a more gradual change from mostly males to mostly females as e increases (Fig. 1). In this manner, a certain amount of developmental noise becomes evolutionarily favored. Reaction norms will be completely flat only when the relative within-patch variation is negligible or when the environmental variable has no effect on competitive abilities. Figures 1A and 1B differ in the ratio s2ezE/sE2 of withinpatch to between-patch environmental variance. When we increase s2ezE/sE2 , the convergence stable reaction norm becomes more switchlike also for fairly small migration probabilities (Fig. 1B). When the variance between patches be- FIG. 1. Convergence stable reaction norms of the adaptive dynamics are shown for different migration probabilities p and for different ratios of the variances of the environmental parameters. (A) s2ezE/sE2 5 0.2. (b) se2zE/sE2 5 1.0. Reaction norms with slopes . 5 are not given a separate migration rate label. m(e) 5 0.5 2 0.1e and f(e) 5 0.5 1 0.1e; s2E 1 s2ezE 5 2.0. comes small, a switchlike reaction norm will not cause very strong fluctuations in the sex ratios of the local populations. Convergence stable reaction norms will have a narrower range of environments over which intermediate sex-determination probabilities occur when population mixing is greater and when the relative magnitude of private to patch environmental variation is greater. An increased level of developmental noise, corresponding to decreased canalization, evolves when there is less population mixing and when environmental variation between patches is comparable to or larger than variation within patches. The qualitative pattern of the results in this example is not 2672 T. J. M. VAN DOOREN AND O. LEIMAR FIG. 2. Pattern of invasion fitness in the space of trait parameters (a, b). Gradual evolution can either increase or decrease trait values, depending on the resident values of a and b. Regions with different directions of evolution are separated by lines and the main direction within each region is indicated by an arrow. Gradual evolutionary change in a and b leads to a convergence stable strategy (a*, b*) 5 (0.0, 0.22), indicated by a dot. In the shaded interval of the line a 5 a* 5 0, invasion fitness shows disruptive selection on the location parameter a. Selection is weakly disruptive at (a*, b*). Parameter values for the competitive abilities and environmental variables are as in Figure 1A and the migration rate p equals 0.3. strongly dependent on the form of competitive ability functions we assumed. For example, we found similar results with sigmoid competitive ability functions instead of linear ones, with female competitive ability independent of e and when the average of E does not coincide with the point where competitive ability functions cross. It is the difference between male and female competitive abilities per environment e that really matters, and our conclusions seem to hold whenever there is a single point where these competitive ability functions cross. Stabilizing or Disruptive Selection Once a population has evolved toward a convergence stable strategy (a*, b*), local invasibility determines what can hap- pen from there. With stabilizing selection in all directions through (a*, b*) in parameter space, no single mutant can invade and evolution comes to a stop. However, there may be neutral or disruptive selection at (a*, b*) for some trait or trait combination. Whether selection is stabilizing or disruptive at a point (a, b) can be determined from the secondorder partial derivatives of invasion fitness with respect to mutant a9 and b9, which can be obtained in a similar way as the first-order partial derivative in (10). With disruptive selection, there may be an accumulation of genetic variation, and a polymorphism of genetically determined strategies can appear through the process of evolutionary branching (Geritz et al. 1998). Disruptive selection favors the extremes of the strategy distribution in the population and intermediates are at a disadvantage. As a consequence, an originally unimodal distribution of traits will become bimodal and one can interpret this as branching of the evolutionary tree. When a trait in a phenotypic model shows evolutionary branching, then a corresponding singlelocus genetic model will show evolutionary branching as well (Van Dooren 2003). For our model, branching can lead from ESD to GSD. Evolutionary branching is a fairly slow process, and one would expect it to occur primarily when there is disruptive selection at a convergence stable point in trait space, because a population will remain near such a point for a long time. However, if a trait evolves very slowly or not at all because of limited genetic variation, branching can occur for other traits that are exposed to disruptive selection. We will consider the possibility that the slope b of the reaction norm could be constrained to evolve slowly, and that there could then be branching in the location parameter a also where b has not reached the equilibrium value b*. Figure 2 shows the directions of increase of invasion fitness at different points in the (a, b) parameter space, for the example with p 5 0.3 in Figure 1A. Selection always favors the location parameter a to become zero, and for a* 5 0 selection will act to adjust the slope to a specific value, which is b* 5 0.2196 in this example. At the point (a*, b*), there is stabilizing selection on the slope b, but very weak disruptive selection on the location a. Considering that b might be constrained to evolve very slowly, we also determined the type of selection on a, at a* 5 0, for different values of b. As shown in Figure 2, we found that selection on a changes TABLE 2. Comparison of evolutionary equilibria of the reaction norm location (a) and slope (b) parameters between the adaptive dynamics approximation and individual-based simulations. The adaptive dynamics results are illustrated in Figure 1. Individual-based 1 Adaptive dynamics Parameters s2e z E s2E p a b 0.333 0.333 0.333 0.333 1.000 1.000 1.667 1.667 1.667 1.667 1.000 1.000 0.0 0.1 0.3 0.5 0.0 0.1 0.000 0.000 0.000 0.000 0.000 0.000 0.022 0.060 0.220 1.360 0.117 0.195 a 20.001 0.003 0.003 0.001 20.006 0.004 6 6 6 6 6 6 b 0.021 0.005 0.007 0.005 0.012 0.006 0.023 0.060 0.215 1.330 0.117 0.192 6 6 6 6 6 6 0.002 0.002 0.004 0.007 0.003 0.003 1 For the simulations, N 5 100 subpopulations with K 5 500 individuals used, except for the p 5 0 cases, where a single subpopulation with K 5 50,000 was used. Data are given as means 6 standard deviations over a large number of generations (50,000 or more; because of genetic drift and environmental fluctuations, population averages of a and b will continue to fluctuate slightly over time in a simulation, also when an equilibrium has been reached). The mutation rate was 0.0002 and the standard deviation of mutational increments was 0.01 both for a and b. We assumed additive genetics in these simulations. EVOLUTION OF SEX DETERMINATION from stabilizing to disruptive when the slope goes above a certain value (b 5 0.2195) located very near the convergence stable slope b*. The strength of disruptive selection on a is greater for larger values of b, which means that branching can occur more readily when the reaction norm is constrained to have a more steplike shape. If the slope can evolve relatively fast, the population may reach (a*, b*) before branching occurs. Because there is weak disruptive selection at (a*, b*), branching could in principle occur at this point, but our individual-based simulations (see below) instead produced a cluster of a genotypes, centered on a* 5 0, corresponding to a balance between mutation, selection, and genetic drift. Thus, the very weak disruptive selection observed at (a*, b*) in adaptive dynamics approximations in practice seems not to split the population into several distinct groups of genotypes. One of the main results by Bulmer and Bull (1982) was that ESD would be favored over GSD when the differential fitness advantages for the sexes in different local environments were great enough in comparison with the magnitude of fluctuations in local sex ratios. We have investigated the importance of the extent of differential fitness advantages for ESD-GSD transitions. We considered different parameters bm and bf of the competitive ability functions, but kept bm 5 2bf, so that a large bf corresponds to large differential fitness advantages for the sexes in different local environments. We found that the equilibrium location was always at a* 5 0 and that the convergence stable slope b* increased with the magnitude of bf, as illustrated in Figure 3A. In all cases we examined, we observed that for bf smaller than a critical value b̂f, there was stabilizing selection on b and very weak disruptive selection on a at the convergence stable (a*, b*). Considering also that the slope b may be constrained to some value different from b*, the value of b where selection on location a (at a* 5 0) changed from stabilizing to disruptive was very close to b* (Fig. 3A). As in Figure 2, selection on location a was disruptive for reaction norms with large b and stabilizing for small b, provided that bf was smaller than b̂ f. For values of bf above the critical value, selection on both slope and location became stabilizing at the convergence stable strategy parameters, and selection on location in fact became stabilizing for all slopes b. At the same time, the convergence stable b* increased rapidly with bf, corresponding to a steplike reaction norm. Figure 3B illustrates that a small migration probability p, which enhances local fluctuations in sex ratios, makes for a larger parameter region with disruptive section, that is, a larger value of b̂ f. Other changes in ecological parameters tending to increase fluctuations in sex ratios, such as a smaller value of s2ezE/sE2 , will have a similar effect of promoting disruptive selection on the location a, which could produce evolutionary branching and GSD. To summarize, we can get evolutionary branching and an ESD-GSD transition if reaction norms for sex determination are constrained to act like fairly abrupt switches, with steeper slopes than the reaction norm favored by the population ecology. For the case of a constrained slope b, our analysis is largely in agreement with that by Bulmer and Bull (1982). Concerning the ecological setting, a low migration rate, little within-patch variation in individual environments relative to 2673 FIG. 3. The convergence stable reaction norm slope b* is shown in (A) as a function of the competitive ability parameter bf, assuming that bm 5 2bf (the convergence stable location is always a* 5 0). Considering that the slope b could be fixed by constraints, the region where selection on the location parameter a is disruptive at a* 5 0 is indicated by shading. For small values of bf, the boundary separating regions with stabilizing and disruptive selection on a nearly coincides with the curve giving b*. The part of this curve where selection on a is disruptive is drawn as a thick line. For values of bf above a threshold value b̂f 5 0.315, selection on a is stabilizing at (a*, b*). For bf . b̂f, selection becomes stabilizing for any value of b. Ecological parameters in (A) are p 5 0.3, se2zE/sE2 5 0.2, and am 5 af 5 0.5. In (B) we have drawn the threshold value b̂ f for different values of the migration parameter p. The threshold becomes smaller when the migration probability increases. between-patch variation, and small differential competitive advantages for the sexes over environments will act in favor of a transition to GSD. Individual-Based Simulations We checked these conclusions and the evolution of major segregating sex-determination effects by means of individual-based simulations. In many sex-determination systems, 2674 T. J. M. VAN DOOREN AND O. LEIMAR a specific signal activates a key gene that controls the first step in a short regulatory cascade (Marin and Baker 1998; Schütt and Nöthiger 2000). It is therefore warranted to study sex determination as a single-locus problem, where all evolutionary change is assumed to occur in the key gene. To investigate the validity of the adaptive dynamics approximation, we ran simulations corresponding to some of the cases in Figure 1 (see Table 2). We used large populations, low rates of mutation, and small mutational increments, to approach a situation of gradual, mutation-limited evolution in an infinite population. In these simulations, we found that GSD failed to become established. Instead, the population evolved to the neighborhood of the convergence stable trait values a* and b* (Table 2). Even though our adaptive dynamics approximations predicted weak disruptive selection on a, a unimodal distribution of genetic variation in a appeared, approximately centered on a*. This distribution seemed to reach an asymptotic standard deviation, without any tendency toward evolutionary branching. The situation was similar for b. Our adaptive dynamics derivation assumed a monomorphic population, and the presence of genetic variation can thus make the approximation slightly inaccurate when disruptive selection is weak. To further investigate the evolution of GSD, we simulated populations of 100 patches with 100 adults produced per patch. Mutation rates per trait parameter and generation were fixed at 0.001 and mutational increments in allelic parameters were drawn from a rectangular distribution with zero mean. We controlled the speeds of evolution of location a and slope b by setting the standard deviation of such a distribution, denoted sa for a and sb for b. We explored a range of initial values of a and b. In cases where we observed branching, the slope b of the initial reaction norm was always greater than the convergence stable b*, and the mutational effects on slope relative to location were small, that is, sb/sa was usually 0.1 or smaller. Additionally, we allowed for dominance evolution in the determination of a and b from the alleles of a diploid genotype. For this we adopted a simple specification for a fully linked dominance modifier, as in Van Dooren (1999). In the simulations, haplotypes indexed i were specified by three parameters: location ai, slope bi, and dominance parameter di, which has a positive value. For a pair of haplotypes i and j, the resulting genotypic location and slope parameters are a5 di ai 1 dj aj di 1 dj b5 di bi 1 dj bj . di 1 dj and (15a) (15b) Thus, the contributions of haplotypes to the genotypic traits a and b are weighted according to their dominance parameters. Just as for the haplotypic parameters ai and bi, the mutational increments in the dominance parameter di was drawn from a rectangular distribution with mean zero and specified standard deviation, sd. However, we did not allow mutation to make di zero or negative. We found that if the initial value of b was large enough and mutational effects in b were small enough, disruptive selection on a could remain substantial for long periods, lead- ing to branching. For instance, with ecological parameters as in Figure 3A, with bf smaller than the threshold b̂ f, and initial conditions corresponding to fairly steplike reaction norms, major sex-determining effects evolved in our simulations. Figure 4 gives an overview of the typical stages in the establishment of major sex-determining alleles. First, evolutionary branching occurs and alleles with major effects become apparent. The population distribution of reaction norms splits up into three bundles, but there is at first no sign of dominance evolution. Once the two alternate homozygote bundles become sufficiently separated, the dominance trait starts evolving. The bundle of heterozygotes then aligns with one of the homozygote bundles, so that only two bundles of reaction norms remain. For the resulting polymorphic population, an individual’s sex is largely determined by its genotype. At the extremes of the distribution of environmental variables, genotypic males still become females and vice versa (patterns of mixed GSD and ESD have been observed; e.g., Lagomarsino and Conover 1993). In the last panel of Figure 4, we changed the migration rate to a higher value, such that the convergence stable reaction norm would be more steplike (cf. Fig. 1A). With this higher migration rate, our individual-based simulation showed that GSD changed back to ESD. Thus, the transition between ESD and GSD in our model is reversible. Another interesting aspect of our simulations is that heterogamety appears in connection with dominance evolution. Figure 5 shows the distribution of haplotypic values for the dominance parameter di and location parameter ai during the simulation in Figure 4. Early in the simulation, there is a single cluster of alleles, near to a 5 0 and the initial value d 5 1 of the dominance parameter. After the establishment of GSD with clear dominance, we see that haplotypes in females cluster in two groups that differ in the location and dominance parameters. In the example in Figure 5, alleles with a positive location value ai have become relatively dominant over alleles with a negative value. The haplotypes in males cluster in the same two groups, but the allele group with positive values of ai contains few individuals. Males have become predominantly homozygous and the females heterozygous for two very different location alleles. We have thus obtained a system with (still incomplete) female heterogamety and a dominant allele for femaleness. Considering a large number of simulation repeats, female and male heterogamety seem about equally likely to evolve. This is expected, based on the entirely symmetric roles of males an females in these simulations. We also simulated cases without an evolving dominance parameter and observed that clear heterogamety did not evolve. DISCUSSION Perhaps the main result of our analysis is that there can be two quite different types of evolutionary responses in sexdetermination traits to fluctuating environments: either the appearance of GSD or increased developmental noise in the ESD mapping from liability to sexual morph. Both of these responses have the property of reducing fluctuations in population sex ratios. When there is little developmental noise and limited genetic variation in the level of randomness, so EVOLUTION OF SEX DETERMINATION 2675 that a norm of reaction is constrained to show a fairly abrupt switch from only males to only females, our analysis essentially confirmed the results by Bulmer and Bull (1982) in a metapopulation setting. A possible difference is that Bulmer and Bull (1982) suggested that a transition from ESD to GSD would come about through mutations with large effects, whereas we have shown that there can also be a more gradual evolutionary accumulation of the extent of polymorphism in sex determination genes, through a process of evolutionary branching (Metz et al. 1996; Geritz et al. 1998). For the shift from GSD to ESD, our simulations revealed that a change in the ecological circumstances, such that ESD no longer would cause excessive fluctuations in population sex ratios, produced a shift from GSD to ESD more or less in the manner suggested by Bull (1981a). If there is sufficient genetic variation in traits influencing the within-individual random variation in liability, so that the slope of a norm of reaction can respond to selection, we found that the population evolved toward the convergence stable trait value and stayed there. While our adaptive dynamics approximation indicated very weak disruptive selection, our simulations produced a unimodal distribution of genotypes centered on the convergence stable strategy. This indicates the limitations of such approximations. Bull (1981b, 1983) noted that increasing environmental fluctuations over space and time would favor a strategy that has a more Fisherian type of sex-determination, with a probability of producing females that tends to 50% in every environment. He interpreted sex determination probabilities that vary gradually with environmental conditions as evidence of the presence of (polygenic) genetic variation in sex determination traits in a population, because he assumed that environmental sex determination entailed a threshold trait with an abrupt switch in the probabilities of becoming either sex (Bull 1983). In our model, smooth reaction norms can occur in genetically monomorphic populations, because we allow the amount of developmental noise at the level of sexdetermination liability to evolve. Imprecise information transfer between environment and gene action could produce such developmental noise, and the level of noise could evolve by reducing or enhancing the precision of information transfer. Little developmental noise, implying a high degree of canalization, corresponds to Bull’s assumptions. Our results suggest that some form of constraint on evolutionary changes ← FIG. 4. Illustration of an individual-based simulation where evolutionary branching occurred. For a random sample of 500 indi- viduals from the population at a given point in time, an individual’s genotypic probability of becoming female in the local environment e where it was born is represented. Mutation rates are 0.001 per trait and generation, and mutational effects have standard deviations sa 5 0.1 for location, sb 5 0.0001 for slope and sd 5 0.1 for dominance. The standard deviation sb was set to be extremely small in this example, such that evolution of the slope parameter hardly occurred. The initial population was monomorphic with haplotypic parameters ai 5 0, bi 5 0.75 and dominance di 5 1. Ecological parameters are as in Figure 1A, with migration probability p 5 0.3, except that the last panel of the figure was obtained by increasing the migration probability to p 5 0.7 and then running the population of the third panel for 5000 additional generations. 2676 T. J. M. VAN DOOREN AND O. LEIMAR FIG. 5. The appearance of heterogamety in the simulation in Figure 4. The panels show bubble plots of location and dominance parameters of haplotypes in males and females (a bubble is drawn, centered at the parameter values of the haplotype, with size proportional to the number of copies of that type among males and females). The top row shows the population of the first panel in Figure 4 and the bottom row the population of the third panel in Figure 4. This last population displays clear differences between males and females in the distribution of haplotypic parameters. Alleles that combine a positive location value with a high dominance value occur much more in females than in males. Most males are homozygotes for a negative location, and most females are heterozygotes with a dominant allele for a positive location value. Because there is little variation in the slope parameter, we do not show it. in the level of developmental noise is needed for a transition from ESD to GSD. Without such a constraint, the Bulmer and Bull (1982) route toward GSD becomes less plausible. Our analysis thus implies a crucial role for noise in the evolution of developmental switches between alternatives, such as the two sexes. Developmental noise is usually studied in genetic networks having the function to produce a single phenotype (Gavrilets and Hastings 1994; Wagner et al. 1997; Kawecki 2000), and in such situations increased canalization is typically favored. This differs from the situation in our analysis, where increased canalization corresponds to a more switchlike reaction norm. We show that it can be evolutionarily favorable to introduce more randomness in development, that is, to decrease canalization. Such noise, usually called ‘‘within-individual variation’’ (Lynch and Walsh 1998), can play the role of a strategic randomization over alternatives that may be favored in fluctuating environments (cf. Haccou and Iwasa 1995; Sasaki and Ellner 1995). Sex-determination genes seem to evolve rather easily (Marin and Baker 1998; Zarkower 2001). Different sex-determination mechanisms occur in closely related taxa and sometimes even within a single species (Bull 1983; Hodgkin 2002). It is likely that transitions between ESD and GSD will be affected by other factors, in addition to the kind of environmental fluctuations in space and time that we have studied here. Examples of such factors could be the presence of genetic conflict between genes with paternal and zygotic expression (Werren and Beukeboom 1998; Werren et al. 2002), sex differences in dispersal combined with spatial heterogeneity (Reinhold 1998), or pleiotropic effects of genes in pathways of sex determination and sexual dimorphism (Kraak and Pen 2002). Nevertheless, for models taking such factors into account, it may still be the case that disruptive selection and the occurrence of evolutionary branching can serve as a paradigm for the emergence of genes with major effects on sex determination. EVOLUTION OF SEX DETERMINATION ACKNOWLEDGMENTS We thank M. Bulmer and J. Bull for helpful comments and P. Hammerstein for genuine interest and inspiring discussion. This research was supported by the European ModLife Research Training Network, funded through the Human Potential Programme of the EU (contract HPRN-CT-2000-00051), by a travel grant from the European Science Foundation Theoretical Biology of Adaptation Programme to TVD, and by grants from the Swedish Research Council to OL. LITERATURE CITED Bull, J. J. 1981a. Evolution of environmental sex determination from genotypic sex determination. Heredity 47:173–184. ———. 1981b. Sex ratio evolution when fitness varies. Heredity 46:9–26. ———. 1983. Evolution of sex determining mechanisms. Benjamin-Cummings, Menlo Park, CA. Bull, J. J., and E. L. Charnov. 1985. On irreversible evolution. Evolution 39:1149–1155. Bulmer, M. G., and J. J. Bull. 1982. Models of polygenic sex determination and sex ratio control. Evolution 36:13–26. Charnov, E. L. 1982. The theory of sex allocation. Pp. 7–18 in S. A. Levin and H. S. Horn, eds. Monographs in population biology. Vol. 18. Princeton Univ. Press, Princeton, NJ. Charnov, E. L., and J. Bull. 1977. When is sex environmentally determined? Nature 266:828–830. ———. 1985. Sex allocation in a patchy environment: a marginal value theorem. J. Theor. Biol. 115:619–624. ———. 1989. The primary sex ratio under environmental sex determination. J. Theor. Biol. 139:431–436. Charnov, E. L., J. Maynard-Smith, and J. J. Bull. 1976. Why be an hermaphrodite? Nature 263:125–126. Christiansen, F. B. 1991. On conditions for evolutionary stability for a continuously varying character. Am. Nat. 138:37–50. Dieckmann, U., and R. Law. 1996. The dynamical theory of coevolution: a derivation from stochastic ecological processes. J. Math. Biol. 34:579–612. Eshel, I. 1983. Evolutionary and continuous stability. J. Theor. Biol. 103:99–111. Eshel, I., and U. Motro. 1981. Kin selection and strong evolutionary stability of mutual help. Theor. Popul. Biol. 19:420–433. Fisher, R. 1930. The genetical theory of natural selection. Clarendon Press, Oxford, U.K. Gavrilets, S., and A. Hastings. 1994. A quantitative genetic model for selection on developmental noise. Evolution 48:1478–1486. Geritz, S. A. H., E. Kisdi, G. Meszena, and J. A. J. Metz. 1998. Evolutionary singular strategies and the growth and branching of the evolutionary tree. Evol. Ecol. 12:35–57. Gibson, G., and G. Wagner. 2000. Canalization in evolutionary genetics: a stabilizing theory? Bioessays 22:372–380. Haccou, P., and Y. Iwasa. 1995. Optimal mixed strategies in stochastic environments. Theor. Popul. Biol. 47:212–243. Hodgkin, J. 2002. Exploring the envelope: systematic alterations in the sex-determination system of the nematode Caenorhabditis elegans. Genetics 162:767–780. Kawecki, T. J. 2000. The evolution of genetic canalization under fluctuating selection. Evolution 54:1–12. Kraak, S. B. M., and I. Pen. 2002. Sex determining mechanisms in vertebrates. Pp. 158–177 in I. Hardy, ed. Sex ratios: concepts and research methods. Cambridge Univ. Press, Cambridge, U.K. Lagomarsino, I. V., and D. O. Conover. 1993. Variation in environmental and genotypic sex-determining mechanisms across a 2677 latitudinal gradient in the fish, Menidia menidia. Evolution 47: 487–494. Leimar, O. 2001. Evolutionary change and Darwinian demons. Selection 2:65–72. Lessard, S. 1989. Resource allocation in Mendelian populations: further in ESS theory. Pp. 207–246 in M. W. Feldman, ed. Mathematical evolutionary theory. Princeton Univ. Press, Princeton, NJ. Lewontin, R. C., and D. Cohen. 1969. On population growth in a randomly varying environment. Proc. Natl. Acad. Sci. 62: 1056–1060. Lynch, M., and B. Walsh. 1998. Genetics and analysis of quantitative traits. Sinauer, Sunderland, MA. MacArthur, R. H. 1965. Ecological consequences of natural selection. Pp. 388–397 in T. H. Waterman and H. Morowitz, eds. Theoretical and mathematical biology. Blaisdell, New York. Marin, I., and B. S. Baker. 1998. The evolutionary dynamics of sex determination. Science 281:1990–1994. Mather, K. 1955. Polymorphism as an outcome of disruptive selection. Evolution 5:52–61. Metz, J. A. J., R. M. Nisbet, and S. A. H. Geritz. 1992. How should we define fitness for general ecological scenarios? Trends Ecol. Evol. 7:198–202. Metz, J. A. J., S. A. H. Geritz, G. Meszéna, F. J. A. Jacobs, and J. S. van Heerwaarden. 1996. Adaptive dynamics: a geometrical study of the consequences of nearly faithful reproduction. Pp. 183–231 in S. J. Van Strien and S. M. Verduyn Lunel, eds. Stochastic and spatial structures of dynamical systems. KNAW Verhandelingen, North Holland. Pen, I., and F. J. Weissing. 2002. Optimal sex allocation: steps towards a mechanistic theory. Pp. 26–45 in I. Hardy, ed. Sex ratios: concepts and research methods. Cambridge Univ. Press, Cambridge, U.K. Rendel, J. M. 1967. Canalisation and gene control. Logos Press, London. Reinhold, K. 1998. Nest-site philopatry and selection for environmental sex determination. Evol. Ecol. 12:245–250. Rice, W. 1986. On the instability of polygenic sex determination: the effect of sex-specific selection. Evolution 40:633–639. Sasaki, A., and S. Ellner. 1995. The evolutionarily stable phenotype distribution in a random environment. Evolution 49:337–350. Schütt, C., and R. Nöthiger. 2000. Structure, function and evolution of sex-determining systems in dipteran insects. Development 127:667–677. Shaw, R. F., and J. D. Mohler. 1953. The selective significance of the sex ratio. Am. Nat. 87:337–342. Shine, R. 1999. Why is sex determined by nest temperature in many reptiles? Trends Ecol. Evol. 14:186–189. Trivers, R. L., and D. E. Willard. 1973. Natural selection of parental ability to vary the sex ratio of offspring. Science 179:90–92. Van Dooren, T. J. M. 1999. The evolutionary ecology of dominancerecessivity. J. Theor. Biol. 198:519–532. ———. 2003. Adaptive dynamics for Mendelian genetics. In J. A. J. Metz and U. Dieckmann, eds. Elements of adaptive dynamics. Cambridge Univ. Press, Cambridge, U.K. In press. Wagner, G. P., G. Booth, and H. Bagheri-Chaichian. 1997. A population genetic theory of canalization. Evolution 51:329–347. Werren, J. H., and L. W. Beukeboom. 1998. Sex determination, sex ratios and genetic conflict. Annu. Rev. Ecol. Syst. 29:233–261. Werren, J. H., M. J. Hatcher, and H. C. J. Godfray. 2002. Maternaloffspring conflict leads to the evolution of dominant zygotic sex determination. Heredity 88:102–111. Zarkower, D. 2001. Establishing sexual dimorphism: conservation amidst diversity? Nat. Rev. 2:175–185. Corresponding Editor: S. Gavrilets