Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Multiferroics wikipedia , lookup
Superconducting magnet wikipedia , lookup
History of metamaterials wikipedia , lookup
Nanochemistry wikipedia , lookup
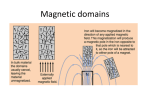
Ferromagnetism wikipedia , lookup
Superconductivity wikipedia , lookup
Scale invariance wikipedia , lookup
Scanning SQUID microscope wikipedia , lookup
Low-energy electron diffraction wikipedia , lookup
Computational Electromagnetics:
Software Development and High Frequency
Modelling of Surface Currents on Perfect Conductors
SANDY SEFI
Doctoral Thesis
Stockholm, Sweden 2005
TRITA-NA-0541
ISSN 0348-2952
KTH School of Computer Science and Communication
ISRN KTH/NA/R-05/41-SE
SE-100 44 Stockholm
ISBN 91-7178-203-6
SWEDEN
Akademisk avhandling som med tillstånd av Kungl Tekniska högskolan framlägges
till offentlig granskning för avläggande av teknologie doktorsexamen i numerisk
analys och datalogi fredagen den 27:e januari 2006 klockan 10.00 i sal E3, Lindstedtsvägen 3, Kungl Tekniska högskolan, Stockholm.
© Sandy Sefi, December 2005
Tryck: Universitetsservice US AB
iii
Abstract
In high frequency computational electromagnetics, rigorous numerical methods become unrealistic tools due to computational demand increasing with the frequency. Instead
approximations to the solutions of the Maxwell equations can be employed to evaluate the
electromagnetic fields.
In this thesis, we present the implementations of three high frequency approximate
methods. The first two, namely the Geometrical Theory of Diffraction (GTD) and the
Physical Optics (PO), are commonly used approximations. The third is a new invention
that will be referred to as the Surface Current Extraction-Extrapolation (SCEE).
Specifically, the GTD solver is a flexible and modular software package which uses
Non-Uniform Rational B-spline (NURBS) surfaces to model complex geometries.
The PO solver is based on a triangular description of the surfaces and includes fast
shadowing by ray tracing as well as contribution from edges to the scattered fields. GTD
ray tracing was combined with the PO solver by a well thought-out software architecture.
Both implementations are now part of the GEMS software suite, the General ElectroMagnetic Solvers, which incorporates state-of-the-art numerical methods. During validations,
both GTD and PO techniques turned out not to be accurate enough to meet the industrial standards, thus creating the need for a new fast approximate method providing better
control of the approximations.
In the SCEE approach, we construct high frequency approximate surface currents extrapolated from rigourous Method of Moments (MoM) models at lower frequency. To
do so, the low frequency currents are projected onto special basis vectors defined on the
surface relative to the direction of the incident magnetic field. In such configuration, we
observe that each component displays systematic spatial patterns evolving over frequency
in close correlation with the incident magnetic field, thus allowing us to formulate a frequency model for each component. This new approach is fast, provides good control of the
error and represents a platform for future development of high frequency approximations.
As an application, we have used these tools to analyse the radar detectability of a new
marine distress signaling device. The device, called "Rescue-Wing", works as an inflatable
radar reflector designed to provide a strong radar echo useful for detection and positioning
during rescue operations of persons missing at sea.
Keywords: High frequency approximations, Maxwell’s equations, Method of Moments,
Physical Optics, Geometrical Theory of Diffraction, Extraction Extrapolation.
Preface
This thesis is focused on the development of high frequency techniques in computational electromagnetics. It is composed of two parts: first, an introduction, giving
background to the subject, followed by a list of papers, each describing relevant
results.
• Paper 1: Sandy Sefi, Fredrik Bergholm, “Modeling and Extrapolating Highfrequency Electromagnetic Currents on Conducting Obstacles”. Proceedings
ICNAAM 2005 International Conference of Numerical Analysis and Applied
Mathematics, Rhodes, Greece, September 2005.
• Paper 2: Sandy Sefi, Fredrik Bergholm, “Extrapolation and Modelling of Method of Moments Currents on a PEC surface”. Technical report, TRITA-NA0539, Royal Institute of Technology presented at the MMWP05 Conference on
Mathematical Modelling of Wave Phenomena, Växjö, Sweden, August 2005.
• Paper 3: Sandy Sefi, Jesper Oppelstrup, “Physical Optics And NURBS for
RCS Calculations”. Proceedings EMB04 Conference on Computational Electromagnetics - Methods and Applications, Göteborg, Sweden, October 2004.
• Paper 4: Tomas Melin, Sandy Sefi, “The Rescue Wing: Design of a Marine
Distress Signaling Device”. Proceedings OCEANS 2005 Conference on Ocean
Science sponsored by the Marine Technology Society (MTS) and the IEEE
Oceanic Engineering Society, Washington DC, United States, September 2005.
• Paper 5: Stefan Hagdahl, Fredrik Bergholm, Sandy Sefi, “Modular Approach to GTD in the Context of Solving Large Hybrid Problems”. Proceedings
AP2000 Millennium Conference on Antennas & Propagation, Davos, Switzerland, April 2000.
• Paper 6: Sandy Sefi, “Architecture and Geometrical Algorithms in MIRA, a
Ray-based Electromagnetic Wave Simulator”. Proceedings EMB01 Conference
on Computational Electromagnetics - Methods and Applications, Uppsala,
Sweden, November 2001.
v
Acknowledgements
This oeuvre has been carried out from August 2000 to September 2005 at the
Department of Numerical Analysis and Computer Science (NADA), at the Royal
Institute of Technology (KTH), in Stockholm, Sweden. During these years, it has
been a true privilege to study at NADA. For this, I am grateful to my supervisor
Prof. Jesper Oppelstrup who offered me such an opportunity. I thank him for his
time, his constant encouragement and for always enlighting the positive side of a
situation.
I am also grateful to my coauthor in half of the papers, Fredrik Bergholm,
for providing invaluable assistance and ultimately made this thesis a reality. His
involvement has considerably enriched this work and I deeply appreciate his willingness to help. I also thank Stefan Hagdahl for his very early efforts as a contributor
as well as Tomas Melin for a pleasant and rewarding collaboration and Martin Nilsson for his comments on the early draft. Lastly, a very special thank you to my
fiancée Eva for her encouragement and great support.
Financial support has been provided by NADA, KTH, PSCI and the National
Aeronautical Research Program (NFFP) within the General ElectroMagnetic Solvers (GEMS) and the Signature Modeling and Reduction Tools (SMART) projects.
vii
Vita
Sandy Sefi was born on March 11, 1974 in Grenoble, France where he graduated in
1997 from the Joseph Fourier University (UJF) with a Degree in Applied Mathematics and Computer Science. He spent the last five months of his graduate diploma
working with Prof. Patrick Chenin in the LMC Laboratory at the Institute for Applied Mathematics of Grenoble (IMAG) on the development of a computer program
for 3D geometrical modelling. After graduation, he was awarded a scholarship from
the French Government to pursue a Master of Science Degree (DESS) in Ingénierie
Mathématiques at the same university.
In May 1998, he left the country to complete a training period at NADA, KTH,
in Sweden and in December the same year he enlisted for a sixteen months French
national service as Coopérant du Service National en Suède, for which he obtained
a scholarship from NADA to work on a survey of numerical methods in Computational Electromagnetics. At the same time, he begun to work in the GEMS project
as well as on the Diplôme de Recherche Technologique (DRT) which he defended in
autumn 2000 at UJF. The same year he was granted a Ph.D. position at NADA
focused on the development of high frequency methods under the supervision of
Prof. Jesper Oppelstrup.
In June 2003, he obtained the Licentiate Degree in Numerical Analysis and
Computer Science at KTH concluding his work on ray tracing in Electromagnetics.
ix
Contents
Contents
xi
1 Introduction
1.1 Outline and main results . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Background: the GEMS project . . . . . . . . . . . . . . . . . . . . .
2 Governing Field Equations
2.1 The Maxwell Equations . . . . .
2.2 Boundary conditions on a Perfect
2.3 Plane wave solution in free space
2.4 The vector Helmholtz Equation .
2.5 Green’s function . . . . . . . . .
2.6 The field integral equations . . .
1
2
4
. . . . . . .
Conductor
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7
8
10
12
12
14
15
3 Scattering Analysis Methods
3.1 Geometrical Theory of Diffraction . . . . . .
3.2 Physical Optics . . . . . . . . . . . . . . . . .
3.3 Method of Moments . . . . . . . . . . . . . .
3.4 Hybrid Methods . . . . . . . . . . . . . . . .
3.5 Modelling the behavior of the surface currents
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
19
19
20
23
25
26
4 Summary of the Papers
4.1 Paper 1: Modelling and Extrapolation, an Extended Abstract
4.2 Paper 2: Modelling and Extrapolation, Continued . . . . . . .
4.3 Paper 3: Physical Optics and NURBS . . . . . . . . . . . . .
4.4 Paper 4: The Rescue Wing, an Engineering Application . . .
4.5 Paper 5: MIRA, a Modular Approach to GTD . . . . . . . . .
4.6 Paper 6: Architecture and Geometrical Algorithms in MIRA .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
31
31
31
32
32
33
34
Bibliography
35
xi
Chapter 1
Introduction
Computational electromagnetics (CEM) may be defined as the branch of electromagnetics that involves the use of computers to simulate electric and magnetic
sources as well as the fields these sources produce in specified environments. In this
work we address the CEM problem of predicting, as realistically as possible, the
electromagnetic behavior of a three-dimensional conducting structure subjected to
an incident wave.
Such models can be applied to a large variety of industrial applications. Computation of mobile phone coverage, design and placement of transmitter or receiver
antennas and stealth aircraft technologies, are a few examples. In the latter application, CEM simulations are conducted to assist the analysis of the radar signature
of an aircraft, either during the design or at manufacturing stages. Ultimately they
aim to replace very expensive and time consuming measurements.
In all these diverse applications the physics is the same: an incident field Einc
or current source1 induces a current Js on the surface of the conductor, which, in
turn, radiates back a scattered field response Escat propagating throughout space.
A8−132
Figure 1.1: Field scattered by an aircraft. In the monostatic configuration we look
for reflections in the radar direction.
1 For
example in the case of transmitting antenna.
1
2
CHAPTER 1. INTRODUCTION
Mesh
CAD
Prototype
CEM Solver for Maxwell Equations
E inc
E
scat
RCS
Measurements
Optimization
Figure 1.2: Design chain leading to the radar signature.
This dynamic interaction can be modeled in several ways. Our methods work
in the frequency domain where all the excitations and their responses are sinusoidal
waves of the same frequency. This allows removal of the time dependence in the
variables. For radar applications, we focus on the high frequency range, a regime
where the wavelengths of the electromagnetic waves are much shorter than the typical dimension of the conductor. We also assume that all the scatterers are perfect
electric conductors (PEC). Physically this means that the fields do not penetrate
the surfaces of the conductor resulting in a null electric field inside the conductor.
The excitations are all plane waves and we look in particular at the monostatic
response, a typical configuration, exemplified in Figure 1.1, where sources and receivers are located at the same position. Figure 1.2 illustrates the typical design
loop applied to the radar cross section (RCS) optimization. The RCS characterizes
the effective area illuminated by the incident plane wave which is scattered back to
the radar. A popular description of the concept of RCS can be found in Paper 4.
RCS is measured in square meters, often normalized and displayed using a logarithmic scale defined in decibel square-meters (dBsm), see Figure 1.3. The reference
0dB corresponds to the return from a sphere of 1m2 cross section.
1.1
Outline and main results
The starting point for modelling the dynamics of the fields is provided by the
fundamental Maxwell equations, to be discussed in detail in Chapter 2. Their
solutions in the frequency domain give rise to a great variety of numerical methods.
Three of them have been studied and implemented in this work. We classify them
into two main groups of frequency methods, the ray-based and the current-based
methods, see Chapter 3.
High frequency approximations which employ “rays” for the computation of the
fields will be referred to as ray-based. More precise definitions of rays and their
1.1. OUTLINE AND MAIN RESULTS
3
Figure 1.3: Typical RCS values in m2 and in dBsm for a range of different objects.
propagation will be given later. These methods require known asymptotic high
frequency solutions such as Geometrical Optics and its generalization, the Geometrical Theory of Diffraction (GTD, UTD) [Keller 62, Pathak 84, McNamara 89].
Ray-based methods are fast and have the advantage to provide a good insight in
the physics of the fields. Paper 5 introduces the implementation of our GTD
solver called MIRA and presents some illustrations for the rays. Paper 6 further
describes the software architecture of MIRA and shows how to design a flexible
architecture which can handle a complex CAD geometry [Farin 88]. The idea is to
avoid simplifications of the geometry of the scatterers and to use, for computations,
the same CAD geometry as used for manufacturing the prototype which is required
for measurements.
When solving the Maxwell equations for the currents on the conductors, the
method will be referred to as current-based. A classic example is the crude currentbased approximation called Physical Optics (PO). Paper 3 presents the implementation of our PO solver. The aim was to assess efficiency and error analysis by
focusing on efficient numerical evaluation of the PO integral, which will be defined
in Chapter 3. An adaptive triangular subdivision scheme for the surface integral is
also provided. In Paper 4, we use this tool to assist the design of a new passive
radar reflector signaling device to be used in case of distress at sea. This represents
4
CHAPTER 1. INTRODUCTION
a good illustration of the potential of these methods to solve real life engineering
problems.
Both GTD and PO can provide very fast results but are approximations that
do not incorporate a complete modelling of the physics and thus, typically degrade
in accuracy. The last contribution is this work, introduced as an extended abstract
in Paper 1 and further developed in Paper 2, draws the basis of a new approximate current-based approach. After a careful examination of the related work in
the introduction, Paper 2 will lead us to the study of the extraction-extrapolation
methods. These methods are based on a simple yet powerful idea: to numerically model (extrapolate) the behavior of the surface current vector fields at high
frequency, using information extracted from lower frequency solutions.
Our extraction-extrapolation approach obtains the behavior of the surface current from Method of Moments (MoM) models at lower frequency. The MoM, see
[Harrington 68, Fares 99], can been viewed as exact brute force technique providing
accurate induced currents, but which do not incorporate any knowledge about the
geometrical structure of the vector field involved. The MoM produces a dense matrix problem, see Chapter 3 for detail, limiting its use to electrically small problems.
In such a context, our goal is to provide a solution when the MoM is no longer an
option and when conventional high frequency techniques fail. In this niche, our new
approach, detailed in Paper 2, is fast, easy to implement and represent a platform
for future development of high frequency approximations.
1.2
Background: the GEMS project
All the numerical methods implemented are now part of the industrial software suite
called GEMS: General ElectroMagnetic Solvers. GEMS has been developed in cooperation with Uppsala University, Chalmers University, Ericsson Microwave Systems AB and Saab AB (Aerotech Telub) during the time period 1998 - 2005, making
the GEMS project the largest Swedish CEM project ever. In the Swedish industry,
GEMS is used by Aerotech Telub and by the Swedish Defense Research Agency
(FOI) to simulate the radar performance of advanced stealth aircraft designs. An
example of such a design, the unmanned aerial vehicle code-named Eikon, is illustrated in Paper 3.
The software suite now incorporates a large choice of numerical tools for various
CEM applications both in time and frequency domain. In the latter, the methods
are efficient for the simulation of single frequency but inefficient for the simulation
of broadband phenomena. Large electrical size problems can be solved using high
frequency approximations. Time domain methods have the exact opposite property,
they are efficient over broad bands but can not efficiently handle high frequency.
In the time domain, GEMS specifies Finite Elements, Finite Volumes and Finite
Differences, see [Taflove 95], as well as hybrid methods between these [Edelvik 02,
Andersson 01, Ledfelt 01, Abenius 04] . In the frequency domain GEMS specifies
Method of Moments, Fast Multipole Method, Geometrical Theory of Diffraction,
1.2. BACKGROUND: THE GEMS PROJECT
5
Physical Optics and Surface Current Extraction Extrapolation, as well as hybrid
methods between these [Nilsson 04, Edlund 01, Hagdahl 05, Sefi 03].
The software is implemented for a number of different computer platforms,
Linux, Sun, IBM, SGI and others, both in serial and parallel versions and mainly
written in the Fortran 90 and MPI programming language. The version control
system CVS [1] is used to keep track of the changes. We use the netCDF [2]
format for output data which allows visualization in Matlab [3] and OpenDX [4].
The geometries are generated by the CAD software CADfix [5]. A more detailed
description of the GEMS software suite can be found in [Oppelstrup 99].
Chapter 2
Governing Field Equations
In this chapter we describe how the Maxwell equations can be derived from the laws
of physics that govern electric and magnetic phenomena, such as Coulomb’s law and
Faraday’s law. We will see that electromagnetic waves are created by time-varying
currents and charges governed by the Maxwell equations. We will demonstrate that
it is possible to write down the fields at a frequency ω > 0
E = iωA − ∇φ
as solutions to the Maxwell equations in form of a complex sum of a magnetic vector
potential A and the gradient of a scalar potential ∇φ. These two potentials will be
found as solutions to vector differential Helmholtz equations, which will be derived
on the surface of the conductors from the Maxwell equations given a sensible choice
of boundary conditions. The vector potential A explains mostly the variations in
the magnetic field, whereas the scalar potential ∇φ can be linked to the variation
of charge. Such analogy, when applied to the tangential component of the magnetic
field on the surface - the current, will come in handy in Paper 1 and Paper 2 to
explain, to decompose and to predict how the surface currents behave.
First, let’s introduce the basic concepts necessary for the derivation of the equations.
Identities for Zero Divergence and Zero Curl of a Vector Field In the
derivation of the equations for the fields, the following identities for the nulls of
divergence and curl, as well as Helmholtz’s theorem will be useful tools.
Identity 1 The curl of the gradient of any scalar field φ is identically zero,
∇ × (∇φ) ≡ 0
It is also true that if the curl of a vector field B is zero, it can be written as the
gradient of a scalar field φ, if ∇ × B ≡ 0 → ∃φ, B = −∇φ. This type of field is
called conservative. This is valid in any system of coordinates. Thus we say that a
conservative field can always be written as the gradient of a scalar field.
7
8
CHAPTER 2. GOVERNING FIELD EQUATIONS
Identity 2 The divergence of the curl of any vector field is identically zero,
∇ · (∇ × A) ≡ 0
It follows that if the divergence of a vector field B is zero, it can be written as the
curl of another vector field A, if ∇ · B ≡ 0 → ∃A, B = ∇ × A. This type of field is
called solenoidal.
Helmholtz’s Theorem 2.1 A general vector field v, which vanishes at infinity,
can be represented as the sum of two independent vector fields; one that is conservative (zero curl) and another which is solenoidal (zero divergence),
v = ∇ × A − ∇φ
In other words, a general vector field which is zero at infinity is completely specified
once its divergence and curl are given.
2.1
The Maxwell Equations
This section results from [Stratton 41], to which the reader can return for more
details. The Maxwell equations involve linear operations on vectorial quantities
E, D, H, B, functions of position (r ∈ IR3 ) and time (t ∈ IR). The vector functions
D and B will later be eliminated from the description of the electromagnetic fields
via suitable constitutive relations. For now, we have
∇ × E = − ∂B
Faraday’s law
∂t
Gauss’ law for electric fields
∇ · D = ρv
∇×H
∇·B
= J +
= 0
∂D
∂t
Ampere’s law
Gauss’ law for magnetic fields
where in SI units,
E
H
D
B
J
ρv
∇·
∇×
Electric field strength (or intensity)
Magnetic field strength
Electric flux density (or displacement)
Magnetic flux density
Current density
Volume charge density
Divergence operator
Curl operator
[V olt/m]
[Ampere/m]
[Coulomb/m2 ]
[W eber/m2 ]
[Ampere/m2 ]
[Coulomb/m3 ]
The first equation is called Faraday’s law and expresses how changing magnetic
fields produce electric fields. The first divergence condition is Gauss’s law and
describes how electric charges produce electric fields. The distribution of charges is
9
2.1. THE MAXWELL EQUATIONS
given by the scalar charge density function ρv . The next equation is Ampere’s law
as modified by Maxwell. It describes how currents and changing electric fields which
act like currents, produce magnetic fields. Finally the second divergence equation
expresses the experimental absence of magnetic charges (magnetic monopoles do
not exist) resulting in the fact that the magnetic flux is solenoidal.
We can simplify the notations by considering time-harmonic fields where the
time-varying fields E oscillating at temporal frequency ω = 2πf , are replaced by
their corresponding vector phasor E(r, t) = Re[e−iωt E(r)]. This leads to the timeharmonic Maxwell equations for single frequency environments,
∇ × E = iωB,
∇·D = ρ
∇ × H = J − iωD
∇·B = 0
The continuity equations for the current The two divergence conditions (the
two Gauss laws) in the Maxwell equations are consequences of the fundamental curl
field equations provided charge is conserved. This is shown by taking the divergence
of the two curl equations (Faraday’s and Ampere’s law), recalling the null identity
for any vector field A, ∇ · (∇ × A) ≡ 0, and by introducing the physical law that
relate the density of current J to the distribution of charge ρv ,
v
∇ · J = − ∂ρ
∂t
Conservation of charge.
(2.1)
It is then enough to study the two curl equations augmented with the continuity
equation Eq. 2.1, see [Stratton 41], in the derivations of the theorems. Our motivation is to use as few concepts as possible to describe the fields. In addition, we
will see that the two curl equations can be written as one second order equation.
The constitutive equations for the medium The Maxwell equations must be
augmented by two constitutive laws that relate E and H to D and B respectively,
E = ǫD and B = µH
(2.2)
where we denote the electric permittivity ǫ = ǫr ǫ0 and the magnetic permeability
µ = µr µ0 . These variables depend on the properties of the matter in the domain
occupied by the electromagnetic fields. ǫ0 and µ0 are constants, ǫ0 = 8.854 ×
10−12 Farads/m and µ0 = 4π × 10−7 Newton/Ampere2 . ǫr and µr are dimensionless
scalar functions characterizing a medium. Vacuum, free space, air and material
with no magnetic or no electric properties have µr = 1 and ǫr = 1. As a result, the
√
speed of the wave in such conditions is given by c = 1/ ǫ0 µ0 .
In GEMS, frequency dispersive materials with ǫ(ω) and metals with µr 6= 1
which behave nearly like PECs at radio frequency are of main interest. However,
ferromagnetic materials with µr ≫ 1, e.g. magnets, require different models.
10
CHAPTER 2. GOVERNING FIELD EQUATIONS
E
H
k
∂Ω
Ω
Figure 2.1: Scattering configuration of a plane wave inducing surface currents on a
perfect conductor Ω.
Before any attempt to write a solution, boundary conditions for both electric
and magnetic fields on the bounding surface should be specified to form a complete
boundary value problem. In particular we are interested in the situation illustrated
in Figure 2.1, where a plane wave travelling in a source-free medium encounters a
PEC scatterer.
2.2
Boundary conditions on a Perfect Conductor
When the space near a set of charges contains electric material, the electric field no
longer has the same form as in vacuum. The interactions between the charges and
the electric field obey the boundary conditions of the Maxwell equations. Together
with the constitutive relations, Eq. 2.2, the Maxwell equations, in presence of a
2.2. BOUNDARY CONDITIONS ON A PERFECT CONDUCTOR
11
prefect conductor Ω, can now be restated as a complete system of equations,
∇ × E = iωµH
in R3 − Ω
ρ
in R3 − Ω
∇·E = ǫ
∇ × H = J − iωǫE
in R3 − Ω
in R3 − Ω
∇·H = 0
n×E
n·E
n×H
n·H
= 0
= ρs
on ∂Ω
on ∂Ω
= Js
= 0
on ∂Ω
on ∂Ω
where n is the normal to the surface S = ∂Ω of the PEC. The expression n · E = ρs
represents the component of E along the normal n, where ρs is the surface charge
density. The tangential component of E is given by n × E = 0. In other words,
the tangential E-field must go to zero on the surface of a conductor. The normal
component of the magnetic field is given by n · H = 0 and the surface currents
are the tangential component of the magnetic field n × H = Js . Other boundary
conditions, for instance for dielectric media, are beyond the scope of this thesis.
At large distance, it is assumed that only outgoing waves are present and that the
fields are bounded when r → ∞.
The energy carried by the field propagates along the Poynting vector k,
k=
1
E×H
µ0
(2.3)
which has the dimension of a power density, watts per square meter. This represents
the direction of the GTD rays described in Paper 5.
We now introduce the wavenumber κ = |k| which satisfies the following relation
in terms of frequency ω and wavelength λ,
κ=
2π
ω
=
.
c
λ
(2.4)
The second order Maxwell equation The two curl equations for the electric
and magnetic fields
∇ × E = iωµH
∇ × H = J − iωǫE
are first order in spatial derivatives. They can be combined into one second order
equation as
∇ × (∇ × E) − κ2 E = iωµJ
(2.5)
thus removing H. Eq. 2.5 will be used later for the derivation of Helmholtz’s
equations.
12
2.3
CHAPTER 2. GOVERNING FIELD EQUATIONS
Plane wave solution in free space
In a source-free medium, the divergence of the electric field is zero, ∇·E = 0. Using
∇ × (∇ × E) = −∇2 E + ∇(∇ · E) in R3 − Ω,
(2.6)
the second order Maxwell system Eq. 2.5 in a source-free medium,
∇ × (∇ × E) − κ2 E = 0,
(2.7)
∇2 E + κ2 E = 0 in R3 − Ω.
(2.8)
simplifies to
Eq. 2.8 is established as Helmholtz’s equation (homogeneous, source-free) and is
also called the wave equation. A possible solution to Helmholtz’s equation is a
plane wave.
E(r) = E0 eik·r
(2.9)
The constant term E0 must be orthogonal to k. Hence the concept of polarization
sets the actual direction of E. The associated magnetic field for a plane wave is
obtained from Faraday’s law
H(r) =
1
k × E0 (r)
Z
(2.10)
where Z is the wave impedance
Z = Zvacuum
2.4
r
µ
;
ǫ
Zvacuum =
r
µ0
= 377Ω
ǫ0
(2.11)
The vector Helmholtz Equation
As mentioned in section 2.1, the two curl equations suffice together with the continuity equation. In the previous section we have seen that the two curl equations can
be replaced by one second order curl equation in E. In this section we demonstrate
that the electric field E is completely determined by one magnetic vector potential A together with the gradient of the scalar potential φ. We show that these
two quantities are derived from the second order Maxwell equation and, when they
fulfill the Lorenz conditions, they satisfy two inhomogeneous Helmholtz equations.
First let’s decompose E in the following complex expression,
E = iωA − ∇φ
(2.12)
2.4. THE VECTOR HELMHOLTZ EQUATION
13
Proof: We start with ∇ × E = iωB. Since the magnetic flux is solenoidal
∇ · B = 0. Then ∃A such that B = ∇ × A, thus ∇ × E = iω∇ × A, that we
restate
∇ × (E − iωA) = 0.
From the null identity of the curl, ∃φ such that E − iωA = −∇φ, that we restate
E = iωA − ∇φ. Such decomposition already appears in [Stratton 41]. However, the authors do not
give any physical interpretation, using it only as a convenient formulation to derive
equations. Note that in Paper 1 and Paper 2, a similar decomposition has been
applied to the surface current vector field.
Let’s now express the quantities A and φ as functions of the surface currents.
To do so, we start from the second order Maxwell system Eq. 2.5
∇ × (∇ × E) − κ2 E = iωµJ.
We insert the electric field defined in Eq. 2.12 into Eq. 2.5 to obtain
∇ × ∇ × (iωA − ∇φ) − κ2 (iωA − ∇φ) = iωµJ.
(2.13)
Because of the null identity ∇ × (∇φ) ≡ 0, this reduces to
iω∇ × (∇ × A) − κ2 iωA + κ2 ∇φ = iωµJ
(2.14)
Imposing the condition,
φ=−
iω
∇·A
κ2
(Lorenz Gauge),
(2.15)
so that the gradient κ2 ∇φ = −iω∇(∇ · A), we obtain
iω∇ × (∇ × A) − iω∇(∇ · A) − κ2 iωA = iωµJ,
(2.16)
which allows us to simplify the expression using the vector triple product
∇ × (∇ × A) − ∇(∇ · A) = −∇2 A.
Thus A satisfies the differential equation of the vector potential,
∇2 A + κ2 A = −µJ
(2.17)
a Helmholtz equation with source term −µJ. Taking the divergence
∇2 (∇ · A) + κ2 ∇ · A = −µ∇ · J
(2.18)
∇2 φ + κ2 φ = − ρǫ
(2.19)
and applying the continuity equation ∇ · J = iωρ with κ2 /ω 2 = µǫ,
we see that φ also satisfies a Helmholtz equation but with source term − ρǫ .
In the next sections, the solutions A and φ of Eq.2.17 and Eq.2.19 respectively,
will be expressed as integral equations using Green’s function.
14
2.5
CHAPTER 2. GOVERNING FIELD EQUATIONS
Green’s function
To get the solution of Helmholtz’s equation with a source term, we introduce an
auxiliary function called Green’s function. First, let δr′ (r) = δ(r − r′ ) denote the
Dirac delta function such that for any continuous function f we have
Z +∞
Z
f (r)δr′ (r)dr =
(2.20)
f (r)δr′ (r)dr = f (r′ ).
−∞
r→r′
This has to be understood as the result of a limit-process, where the source is
distributed over a finite domain which shrinkes until, in the limit, the entire source
is applied at the point r = r′ . Green’s function represents the inverse of the
differential Helmholtz operator [∇2 + κ2 ] which has the Dirac delta function as
source term.
∇2 G(r, r′ ) + κ2 G(r, r′ ) = −δ(r − r′ )
(2.21)
∇2 G + κ2 G is zero everywhere, except possibly at r = r′ . For r 6= r′ we can express
the solution G(r, r′ ) of Eq. 2.21 as an outward spherical wave of origin r′ ,
′
eiκ|r−r |
G(r, r ) =
4π|r − r′ |
′
(2.22)
Green’s method: Let ρ be a function with bounded support, then the solution
ψ(r) to the general Helmholtz equation
∇2 ψ(r) + κ2 ψ(r) = −ρ(r);
ψ → 0 as r → ∞
(2.23)
is given by
ψ(r) =
Z
G(r, r′ )ρ(r′ )dΩ′
(2.24)
Ω
Consequently, to get the solution to our problem, we multiply G(r, r′ ) by the source
function ρ and integrate over the region of interest.
Far field approximation: If we introduce the unit vector r̂ = r/|r| pointing
from the origin of the coordinates to the observation point, the distance |r − r′ |
becomes
p
p
(2.25)
|r − r′ | = r2 + r′2 − 2r · r′ = |r| 1 + [r′2 /|r|2 − 2r̂ · r′ /|r|]
which can be approximated with respect to r2 and in the limit as r → ∞ using
|r − r′ | ≈ |r|(1 + [r′2 /|r|2 − 2r̂ · r′ /|r|]/2)
(2.26)
Through the above Taylor expansion, the term in r′2 becomes negligable,
|r − r′ | ≈ |r| − r̂ · r′
(2.27)
2.6. THE FIELD INTEGRAL EQUATIONS
15
Green’s function in the far field can now be approximated as
G(r, r′ ) ≈
eiκ|r| −iκr̂·r′
e
4π|r|
(2.28)
This approximation will be used later to derive the PO integral studied in Paper 3.
The criterion for far field is that the distance R = |r − r′ | between source point and
observation point, is much larger than both the size of the scattering object and
the wavelength λ.
2.6
The field integral equations
In previous sections we have seen that the field E can be decomposed into
E = iωA − ∇φ
where A satisfies
∇2 A + κ2 A = −µJ
and φ satisfies
ρ
ǫ
Then the electric field E can be computed from the surface currents by using Green’s
method applied to A and φ. We find the solution for the magnetic vector potential
A as
Z
A(r) = µ J(r′ )G(r, r′ )dS ′
(2.29)
∇ 2 φ + κ2 φ = −
S
and, since ρ =
1
iω ∇
· J , the scalar potential as
Z
1
φ=
(∇′ · J(r′ ))G(r, r′ )dS ′
iωǫ S
(2.30)
where S denotes the surface of the PEC with surface currents J and ∇′ denotes the
vector derivative with respect to r′ . With wµ = κZ and wǫ = κZ −1 , we obtain the
integral formulation for the electric field,
Z
Z
iZ
∇(∇′ · J(r′ ))G(r, r′ )dS ′ ,
(2.31)
E = iκZ
J(r′ )G(r, r′ )dS ′ −
κ S
S
and the integral formulation for the magnetic field,
Z
Z
iZ −1
∇(∇′ · J(r′ ))G(r, r′ )dS ′ .
H = iκZ −1
J(r′ )G(r, r′ )dS ′ +
κ
S
S
Green’s function Eq. 2.22 substituted into Eq. 2.31 produce
Z
Z
′
′
eiκ|r−r |
iZ
eiκ|r−r |
′
′
′
J(r′ )
E = iκZ
dS
−
dS ′ ,
∇(∇
·
J(r
))
4π|r − r′ |
κ S
4π|r − r′ |
S
(2.32)
(2.33)
which only depends on the surface currents J. For further readings on the subject
see [Bendali 99]. Now it remains to find an integral equation for the unknown
surface currents J.
16
CHAPTER 2. GOVERNING FIELD EQUATIONS
Electric Field Integral Equation (EFIE)
ent of the total field on the surface, Etan ,
We denote the tangential compon-
Etan = E − (n · E)n = n × E.
(2.34)
If imposing the boundary condition that the total tangential electric field vanishes
on the surface, see Section 2.2, written as
scat
Etan = Einc
tan + Etan = 0
(2.35)
where we define the incident electric field E inc as the field that would exist in the
absence of the scatterer. If assuming that the scattered field E scat also can be
obtained from the solutions to Maxwell’s equations, see [Hodges 97], and written
as
Escat (r) = iωA(r) − ∇φ(r),
(2.36)
then we obtain the famous EFIE (Electric Field Integral Equation) for a PEC as
[iωA(r) − ∇φ(r)]tan = −Einc
tan .
(2.37)
We plug the expression for A, Eq. 2.29, and φ, Eq. 2.30, into Eq. 2.37 and get
Z
Z
iκZ
′
′
′
∇(∇′ · J(r′ ))G(r, r′ )dS ′ ]tan = −Einc
(2.38)
[iκZ
J(r )G(r, r )dS − 2
tan .
κ
S
S
In the next chapter we will see how this integral equation can be solved numerically
using the Method of Moments (MoM) with the surface currents as unknown. Once
the surface currents are determined the scattered field can be found as
Z
1
[−iκZJ(r′ )G(r, r′ ) +
=
n
×
Escat
∇J(r′ ) · ∇G(r, r′ )]dS ′ .
(2.39)
tan
−1
−iκZ
S
Magnetic Field Integral Equation (MFIE) Using the same procedure applied to the magnetic field with the boundary condition of the magnetic field
n × H = J, see Section 2.2, the MFIE (Magnetic Field Integral Equation) is obtained,
Z
J(r)
(2.40)
− n × − J(r′ ) × ∇′ G(r, r′ )dS ′ = n × Hinc (r).
2
S
R
where − is called the principal value integral with regions where the source and field
points coincide have been excluded. The EFIE and the MFIE can be used either
combined or separatly to solve for the currents, except for frequencies corresponding
to interior body resonaces. As it will be shown in the next chapter, if one ignores the
field expressed by the integral term in the MFIE, one obtains the Physical Optics
assumption, that is the current is given by twice the tangential component of the
incident magnetic field J(r) = 2n × Hinc , without the need to solve an integral
equation.
17
2.6. THE FIELD INTEGRAL EQUATIONS
Far field In the far field, Green’s function is approximated by Eq. 2.28 and
plugged into Eq. 2.33 where the divergence can be placed outside the integral using
the definition of the Lorenz Gauge combined with Eq.2.17 and Eq.2.19
E = iκZ[1 −
1
∇∇·]
κ2
Z
S
′
J(r′ ) ·
eiκ(|r|−r̂.r ) ′
dS ,
4π|r|
(2.41)
which can be written as
E = iκZ[1 −
eiκ|r|
1
∇∇·]
2
κ
4π|r|
Z
S
′
J(r′ ) · e−iκr̂·r dS ′ .
(2.42)
It is now suitable to simplify the notation by introducing the vector field defined
by
Z
′
iκ2 Z
J(r′ ) · e−iκr̂·r dS ′ .
(2.43)
K(r) =
4π S
Then the electric field is written as
E = [1 −
1
eiκ|r|
∇∇·](
K(r)).
κ2
κ|r|
(2.44)
Under approximation in the far zone, the operator κ12 ∇∇· in Eq. 2.44 is approximated using the fact that components that vanish faster than 1/κ|r| are negligible,
see [Rumsey 54], such that the dominating contribution to the scattered electric
field becomes
eiκ|r|
Escat =
[K(r) − r̂(K(r) · r̂)].
(2.45)
κ|r|
Using the triple vector identity, we finally get
Escat =
eiκ|r|
[r̂ × (K(r) × r̂)]
κ|r|
(2.46)
which is called the far field radiation integral. This expression is a function of
the direction r to the observation point and of the surface currents only and the
expression [r̂ × (K(r) × r̂)] represents the far field amplitude of the wave. Finally,
the RCS σ is then computed as
σ=
4π scat 2
|E
|
λ2
(2.47)
The magnetic scattered field is found by using Faraday’s law ∇ × E = iκZH by
neglecting the components that vanish faster than 1/κ|r| in the evaluation of the
curl operator,
eiκ|r|
r̂ × [r̂ × (K(r) × r̂)].
(2.48)
Hscat ≈ Z −1
κ|r|
Chapter 3
Scattering Analysis Methods
3.1
Geometrical Theory of Diffraction
Exact solutions to the Maxwell equations are known for canonical scattering geometries such as an infinite cylinder, sphere or cone. For complicated geometries, approximate methods can be derived from these analytical solutions [Kouyoumjian 65].
In the limit of vanishing wavelength (λ → 0), a widespread approximate method
is the Geometrical Theory of Diffraction (GTD) [Keller 62]. It is based on the
fact that diffraction phenomena exhibit local properties at high frequency. As a
consequence, the scattered field does not depend on the interactions from all points
on the surface of the conductor, but rather on the contributions from few points
located in the neighborhood of some special positions called diffraction points.
Under such assumptions, the complex scattered field is analytically approximated with a superposition of known solutions from simple canonical scattering
geometries. The total scatter solution is expanded, see [McNamara 89], as
Escat (r) = eiκΨ(r)
∞
X
(iλ)n En (r)
(3.1)
n=0
where Ψ(r) is the optical distance from the source point r and the amplitude En (r)
is independent of the wavelength λ. Furthermore, GTD postulates that energy
propagates along direct, reflected and diffracted rays. This enables the use of the
ray tracing algorithms introduced in Paper 5 and further detailed in the author’s
Licentiate thesis [Sefi 03] and in [Catedra 98]. These algorithms draw (“trace”) the
various dominant propagation paths between sources and receivers interacting with
the surface of the conductor, describing the following asymptotic phenomena:
• Direct field
• Reflected field
• Diffracted field
19
20
CHAPTER 3. SCATTERING ANALYSIS METHODS
• Multiple fields, e.g. double reflected, diffracted-reflected, ...
The ray trajectories are determined independently and the computational cost depends on the geometry of the obstacle instead of the electrical size.
Despite these nice features, the GTD has a few drawbacks which may sometimes reduce the usefulness of the results. First, there may be many higher order
multiple ray interactions which involved combinations of diffractions, increasing the
complexity of the ray tracing task. This has been addressed in Paper 6. Second,
the accuracy of the calculated field is relatively low since the theory will only yield
the leading terms in the asymptotic high frequency solution of the Maxwell equations.
3.2
Physical Optics
The Physical Optics (PO) technique is also a well-known and widely used high
frequency approximate technique for the calculation of the electromagnetic field
scattered from a PEC illuminated by an incident electromagnetic field. It is a very
fast technique since it does not require an integral equation to be solved. The idea
is to approximate the surface currents as if they were obtained on an infinite flat
plate. Physically it can be interpreted as replacing locally the conductor by a flat
plate and neglecting the contributions from sharp edges, corners and all mutual
interactions such as multiple reflections or creeping waves, what remains being the
main reflection.
In order to derive the PO current, we first need to have a look at the fields
which induce it. As previously mentioned in Chapter 2, the total field E can be
decomposed in a sum of incident and scattered field
ETotal = EInc + EScat .
(3.2)
The boundary conditions on a PEC impose that the tangential component of ETotal
vanishes
n × ETotal = 0 on ∂Ω,
(3.3)
which means
n × EScat = −n × EInc .
(3.4)
Consecutively, the tangential component of the electric fields flips on reflection, as
illustrated in Figure 3.1.
Figure 3.1 displays the two generic cases, the well-known TM- and TE-case,
characterized by magnetic (or electric) incident fields transverse to the plane of
incidence, spanned by k and n. In the TE–case, there is no component normal to
the surface,
n · ETotal = 0, n · HTotal = 0
(3.5)
which means that there are no charges on the surface (ρs = 0). The normal
component of the incident and scattered magnetic fields cancel each other. Due to
21
3.2. PHYSICAL OPTICS
E
H
E
k
H
E
H
H
k
E
n
E
H
H
Etan=0
TM case: tangent. comp. E flips
total tangent H double
E=0
TE case: normal comp. H flips
total tangent H double
tangent. comp. E flips
Figure 3.1: TE, TM: case on a plate.
the dynamics in the Maxwell equations, what is lost in the normal component is
gained by the tangential component making the tangential component for the total
magnetic field double. Thus on the surface where Js = n × HTotal we get
Js = 2n × Hinc
(3.6)
In the TM–case, on the surface, the total E–field has only a component normal
to the surface,
n · ETotal = ρs
(3.7)
which means that we have a maximal transverse charge. The tangential component
of the incident and scattered magnetic fields cancel each other making the tangential
component of the total magnetic field to double, getting once more Eq. 3.6 for the
current.
On an infinite flat plate there is no concentration of charge ∇ · J = 0 in the
lit region. On the shadow side of an infinite plate, no field can penetrate resulting
in no current. This leads to the following surface currents referred to as the PO
currents:
2n × Hinc (lit region)
(3.8)
JP O =
0 (shadow region)
The vector field of the PO currents has zero divergence making it solenoidal.
The next step is to obtain the far field scattered field induced by JP O . From
Eq. 2.46, we directly get
scat
E
Escat =
iκZeiκR
[r̂ ×
=
4πR
iκZeiκR
[r̂ ×
4πR
Z
S
Z
S
′
JP O (r′ )e−iκr̂·r dS ′ × r̂)]
scat
JP O (r′ )e−iκ(k̂
−k̂inc )·r′
dS ′ × r̂]
(3.9)
(3.10)
22
1.5
1.5
1
1
0.5
0.5
0
E
K
−0.5
H
0
E
−0.5
H
−1
−1.5
−1
z
y
CHAPTER 3. SCATTERING ANALYSIS METHODS
−0.5
0
0.5
1
1.5
−1
2
2.5
−1.5
−1
K
−0.5
0
x
0.5
1
1.5
2
2.5
x
Figure 3.2: Direction of PO currents
on a sphere viewed from the top.
Figure 3.3: Direction of PO currents
on a sphere viewed from the side.
For a finite plate and for even moderately high frequencies JP O provides a reasonably good approximation of the surface currents, at least away from diffraction
and creeping wave phenomena generated by the sharp edges of the plate or when
grazing incidence occurs.
In the case of monostatic direction, we have k̂inc = −k̂scat thus Eq. 3.10 simplifies to
iκZeiκR inc
[k̂ ×
=
4πR
Z
inc
·r′
dS ′ × k̂inc ].
(3.11)
Using the associated magnetic field for a plane wave Eq. 2.10 (Hinc =
we obtain
Z
inc ′
i2κeiκR inc
scat
E0
[k̂inc · n̂]ei2κk̂ ·r dS ′ .
E
=
4πR
S
1 inc
×Einc
0 ),
Z k̂
scat
E
S
[2n̂ × Hinc ]ei2κk̂
(3.12)
This is the PO integral which has been further studied in Paper 3. In particular
we observe that the amplitude of the integrand is proportional to cos(n̂, k̂inc ) which
is a slowly varying function over the surface whereas the phase is an exponential
function rapidly varying. We will come back to this point later.
For a smoothly curved perfect conducting body, the PO current is an amazingly
good approximation of the induced surface currents, away from shadow boundaries
and as long as the radius of curvature is larger than the wavelength (high frequency). The physical origin of the PO currents is clear – the magnetic field only.
In Figure 3.2 and Figure 3.3 we see how the direction of the PO current on a sphere
is everywhere perpendicular to the magnetic field. The properties of the direction
of the PO currents have been further detailed in Paper 1 and Paper 2 leading to
the concept of PO streamline. A comparison between the RCS of a sphere obtained
with PO, and the analytic solution for the RCS of a sphere, see Mie solution in
[Bowman 87], can be seen in Figure 3.5.
23
3.3. METHOD OF MOMENTS
Concerning the implementation, two major difficulties need to be treated. First,
the detection of the shadow regions for complex structures has to be taken care of.
Shadowing algorithms for PO has been introduced in Paper 6 and a fast algorithm
based on ray tracing has been proposed in the author’s Licentiate thesis [Sefi 03].
Other known solutions consist in processing the surfaces with a graphical engine.
In [Rius 93] and [Asvestas 95], an image of the surfaces on the computer screen is
used and the shadowing is processed efficiently by the hardware.
A second difficulty is to solve numerically the PO integral, in particular the
′
treatment of the oscillating phase factor ei2κk̂·r . There exist many different ways
which more or less can be grouped into three main basic concepts:
• The most classic way is to evaluated the PO integral using quadrature formulas, for example Gauss quadrature. This requires a number of evaluation
points, proportional to the wave number squared.
• In Gordon’s method [Gordon 94], the surface integral on special geometries
can be converted into simpler single integrals.
• Approximation methods such as stationary phase or linear phase approximation, produce simplified expressions for the integral which can then be solved
analytically. In the stationary phase methods [Catedra 95], an approximation to the integral is found at some points where the phase is stationary.
The problem then reduces to determine the positions of all the stationary
phase points using complex minimization techniques similar to the ones used
in GTD. In the linear phase approximation [Ludwig 68, Moreira 94], polynomial approximations to the phase is used, see Paper 3. Note that partial
quadratic phase approximations which do not include any mixed terms have
been tried in [Crabtree 91].
3.3
Method of Moments
This section explains the theoretical foundations of the very popular and the most
accurate method to solve the integral equation for the surface current J, namely
the Method of Moments [Harrington 68]. To do so, the starting point is to use the
EFIE Eq. 2.38 and to approximate J by the expansion
X
J(r′ ) =
jq fq (r′ )
(3.13)
q
′
where fq (r ) are chosen vector basis functions and jq are scalar coefficients to be
determined. A popular choice of linear basis functions is the Rao-Wilton-Glisson
(RWG) basis functions [Rao 82], which are defined as
lq
ρ+
if r ∈ Tq+
q ,
+ 2A+
q
l
(3.14)
fq (r) =
− q− ρ−
if r ∈ Tq−
q ,
2Aq
0,
otherwize
24
CHAPTER 3. SCATTERING ANALYSIS METHODS
±
where A±
q denote the area of the triangles Tq , lq the length of the qth edge and
±
±
ρq = ±(rq − r) the vector from the free vertices opposite to the qth edge, r±
q , see
Figure 3.4. The basis functions represent the current flowing through the qth edge
n+
ρq+
ge
qth ed
T+
ρqT-
r
r q+
r q-
Figure 3.4: Rao-Wilton-Glisson (RWG) basis function.
from the triangle Tq+ to Tq− . A nice property is that the divergence of the basis
function across the edge is a constant
∇ · fq± = ±
lq
,
A±
q
(3.15)
so no charge can be accumulated along the edge. Multiplying the EFIE with a test
current fp and integrating results in a set of linear equations
[A]{J} = {V }
where the elements of the excitation vector {V } are given by
Z
Vp =
−Einc (r) · fp (r)dS
(3.16)
(3.17)
S
and {J} is the column of the unknown coefficients jq . In Paper 2, the basis function
coefficients have been used as direct input for extrapolation to high frequency. The
25
3.4. HYBRID METHODS
matrix [A] is called the impedance matrix whose entries are given by
Z Z
¯ (r, r′ ) · f (r′ )dSdS ′ ,
fp (r)Ḡ
Apq = iκZ
q
S
where
3.4
(3.18)
S
¯ (r, r′ ) = [1 − 1 ∇(∇′ ·)]G(r, r′ )
Ḡ
κ2
(3.19)
Hybrid Methods
The MoM requires a number of unknowns N inversely proportional to the square of
the wavelength λ2 which makes the size of the impedance matrix unmanageable at
high frequency. Solving the system in Eq.(3.16) with Gaussian elimination requires
O(λ−6 ) arithmetic operations and O(λ−4 ) for storage. To overcome this difficulty,
many types of hybrid approaches have been proposed.
These methods can be classified into four groups. First the methods which focus
on obtaining an approximate sparser impedance matrix using domain decomposition between MoM and PO or MoM and GTD [Thiele 75, Burnside 75, Bouche 93].
The idea is to split the large smooth geometry parts away from small details modelled by MoM. This leads to the popular MoM-PO hybrid solvers [Rahmat-Samii 91,
Jakobus 95, Hodges 97, Taboada 00, Edlund 01]. In our experience, the main weakness of these methods is that of displaying large errors where PO fails [Burnside 87],
i.e. in shadow regions or near edge discontinuities.
Second the methods which also aim to avoid expensive linear algebra but using
instead efficient matrix algorithms such as Multi-grid [Sarkar 02], Wavelet compression [Leviatan 93] or Fast Multipole Method (FMM) [Greengard 87, Rokhlin 92].
FMM which is the most successful, uses block decomposition [Greengard 87] where
the far field elements are regrouped into small low rank blocks [Nilsson 00]. However, the technique still needs to represent the fastest variation of the phase thus
requiring the same large number of unknowns as in MoM.
In the third group, we have the methods which reduce the total number of
unknowns [Taboada 01, Taboada 05]. They typically require difficult alternative
basis functions [Djordjevic 04]. More References as well as descriptions of related
work can be found in the introduction of Paper 2.
Finally, the last group of methods is the Extraction-Extrapolation methods.
They model the behavior of the surface currents by looking at currents obtained
at low frequency [Mittra 94, Aberegg 95] and then extrapolate them to higher frequencies [Altman 96, Altman 99], The latest development in this direction, see next
section for more details, is the Asymptotic Phasefront Extraction (APE) technique
[Kwon 00, Kwon 01], which gives a propagating ray-based description analogue to
GTD of the surface currents.
APE-MoM Phasefronts In [Kwon 01], the goal is to reduce the total number
of unknowns in the MoM procedure by approximating the induced surface current
26
CHAPTER 3. SCATTERING ANALYSIS METHODS
over large smooth regions with one or several linear phase currents,
m
J(r′ ) = Ceik
·r′
,
(3.20)
m
where C is a complex vector amplitude assumed to be constant and k is the
direction of a phasefront travelling on the surface. At each point r′ on the surface,
a local low frequency phase variation is split into several phasefronts of m different
directions. The phasefront extraction is achieved using a multi-dimensional complex
Fourier transform j(ku , kv ) on a rectangular grid of the low frequency complex
current as
Z
inc ′
j(ku , kv ) =
J(r′ )eik ·r dS ′ ,
(3.21)
S
where ku , kv are the components of the projection of kinc on the surface S and J(r′ )
is obtained from a low frequency MoM solution. The dominating components in the
Fourier space are found using a peak-searching procedure for local maximum. Given
m extracted phasefront directions, the linear phase currents are then expanded as
Jh (r′ ) =
X
jh fh (r′ ) +
Nh
Km
XX
Nl
m,p
jl fl eikh
·(r′ −rm )
,
(3.22)
p
where the subscript l indicates elements evaluated over the low frequency sparse
grid and h over the high frequency dense grid away from smooth regions. On the
latter grid, which ideally should correspond to small regions, the basis functions
from MoM are used as usual. Over the large smooth regions, the low frequency
basis functions fl are multiplied by the built-in phase propagation factor to form
the high frequency basis functions. The modified basis functions inherit the quick
variation in the exponential to speed up the surface integration. The wavenumber
is scaled linearly to the right frequency such that
km,p
=
h
λlow m,p
k ,
λhigh l
p = 1, ..., Km
(3.23)
The high frequency approximate current is then plugged into the MoM formulation
with fewer unknowns than the conventional MoM requires. A shortcoming of this
technique is that it still requires computationally expensive numerical integrations
when solving the matrix system.
Thus, one would like to devise a technique which does not require a second MoM
system to be built and solved. In Paper 1 and Paper 2, this has been achieved by
constructing high frequency currents with behaviors obtained from current-based
methods only (MoM and PO), instead of using a propagating ray-based description
of the surface currents.
3.5
Modelling the behavior of the surface currents
Let’s apply the Physical Optics and the Method of Moments techniques described in
the previous sections to the typical scattering problem of a metallic sphere centered
27
3.5. MODELLING THE BEHAVIOR OF THE SURFACE CURRENTS
Normalized monostatic RCS of a PEC−sphere, r=1m
15
10
5
0
σ [dBsm]
−5
−10
PO
Mie serie 100 terms (Exact)
MoM−QMR solver
−15
−20
−25
−30
−35
0
50
100
150
200
250
300
350
400
450
500
f [MHz]
Figure 3.5: Monostatic RCS of a one meter sphere using MoM and PO, compared
to the analytical Mie solution.
at the point (0,0,0), illuminated by a plane wave propagating in (0,0,-1) direction.
For a sphere, the numerical methods can be compared to an analytic solution known
as the Mie-series.
In Figure 3.5, we display the monostatic Radar Cross Section given by the Mieseries along with the solutions obtained with the Physical Optics and the Method
of Moments for various frequencies ranging from 1MHz to 500MHz. Three observations can be made:
• (i) The MoM breaks down due to poor resolution when the wavelength increases. This happens around f=250MHz as expected since the number of
unknowns is kept fixed.
• (ii) For low frequency, all three methods give similar results. The sphere is
too small, compared to the wavelength, to be seen.
• (iii) For high frequency, the PO converges to the Mie-series. The radius of
curvature becomes much bigger than the wavelength, getting closer to the
configuration of a large plate.
28
CHAPTER 3. SCATTERING ANALYSIS METHODS
Surface Currents on a Sphere, ka =1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0H
E
z
z
Surface Currents on a Sphere, ka =0.1
1
0H
−0.2
−0.2
−0.4
−0.4
−0.6
−0.6
−0.8
−1
E
−0.8
−0.8
−0.6
−0.4
−0.2
K
0
y
0.2
0.4
0.6
0.8
−1
−0.8
−0.6
−0.4
−0.2
K
0
y
0.2
0.4
0.6
0.8
Figure 3.6: Directions of the surface currents obtained using MoM on a 1m sphere
viewed from the side, illuminated by a plane wave coming from the top, for k=0.1
and k=1.0. Note that the triangulation is transparent, thus we see currents on the
back and on the front currents simultaneously.
A closer look at the real part1 of the surface currents obtained from the MoM at
low frequency is provided in Figure 3.6. In agreement with the observation (ii) that
the MoM and the PO solutions match, the induced MoM current vectors computed
at the frequency k = 0.1 are aligned like the PO current vectors. Increasing the
frequency to k = 1.0, we observe that the direction of the MoM current vectors
deviate from their PO positions. They tend to point towards the South pole as well
as getting smaller in the shadow zone. Our motivation in Paper 2 is to model this
deviation as well as to predict its behavior at higher frequency.
One clue about the behavior of the deviation is given in Figure 3.7, which
displays the components of one particular vector on the sphere as a function of
the frequency. We observe that each spatial component displays systematic sinus
patterns evolving smoothly over frequency, until the MoM breaks down. Such
patterns describe in fact a rotation of the surface current vector with frequency.
The rotation of the vector takes place in the tangent plane of the surface and,
according to observation (ii), begins at low frequency with a vector aligned to the
PO currents.
In addition, we know from the structure of the incident magnetic field, that the
PO currents run along level curves, referred to in Paper 1 and Paper 2 as PO
streamlines. Figure 3.8 displays the PO streamlines on a sphere for two different
incident illuminations. Thus, in order to estimate the difference between the total
1 The
imaginary part can be treated analogously at a quarter of period later.
3.5. MODELLING THE BEHAVIOR OF THE SURFACE CURRENTS
−3
4
29
Components of current Real(J) on triangle1
x 10
real(Jx)
real(Jy)
real(Jz)
3
Real(Jx), Real(Jy), Real(Jz)
2
1
0
−1
−2
−3
−4
0
50
100
150
200
250
f [MHz]
300
350
400
450
500
Figure 3.7: Variations of the components of one current vector with respect to
frequency computed with the MoM. When the frequency gets too large, the MoM
breaks down requiring more elements per wavelength. Also, frequencies corresponding to interior body resonaces can be observed when all the three components the
become singular.
and PO currents, it makes sense to decompose the total current into one component
along the PO streamline and one component perpendicular to the streamline, as
illustrated in Figure 3.9 and further described in Paper 1. More details are given
in the next Chapter and in Paper 1 and Paper 2.
30
CHAPTER 3. SCATTERING ANALYSIS METHODS
E
H
K
1
1
0.8
0.5
0.6
0.2
z
z
0.4
0
0
−0.2
−0.5
−0.4
−0.6
−0.8
−1
1
−1
−1
1
−0.5
0.5
0
0
0
0
0.5
0.5
−0.5
0.5
−0.5
1
−0.5
1
−1
y
−1
x
y
x
Figure 3.8: PO streamlines on a 1m sphere, illuminated from the top with the magnetic field in y-direction (on the left), illuminated from the side with the magnetic
field in z-direction (on the right).
Jcross
Jmom
Jpo
Figure 3.9: Decomposition of the surface currents along a PO streamline.
Chapter 4
Summary of the Papers
4.1
Paper 1: Modelling and Extrapolation, an Extended
Abstract
In this paper we introduce the decomposition of the surface currents J, expressed in
the triangular-type Rao-Wilton-Glisson (RWG) vector basis functions in the MoM
formulation, into parallel J|| and perpendicular J⊥ vector components, denoted
nxH-parallel currents and cross-currents respectively, relative to the direction of the
incident magnetic field on the surface. These two currents yield systematic spatial
patterns evolving over frequency in close relation to the incident magnetic field,
both on the illuminated and the shadow side of the body. From these observations
we derive two reference models for the scalar components J|| and J⊥ and compare
them to MoM for various frequencies.
The author of the thesis performed the numerical experiments and presented it
at the ICNAAM 2005 International Conference of Numerical Analysis and Applied
Mathematics, Rhodes, Greece, September 2005. The theoretical derivation as well
as the implementation has been made by both authors in cooperation. The idea
of the reference model for the parallel component and the fact that the incident
magnetic field can be used both on the illuminated and the shadow side come from
the first author. The idea for the model of the perpendicular component comes
from the second author.
4.2
Paper 2: Modelling and Extrapolation, Continued
In this paper the analysis presented in Paper 1 is extended. The vector field
decomposition is not standard and yields a better understanding of the structure
of the surface currents as well as the underlying physics governing their spatial
variations, i.e. charge transport and charge accumulation. The oscillating behavior
of the current is strongly linked to that of the incident magnetic field. The reference
models for the components J|| and J⊥ of Paper 1 are modified by coefficients
31
32
CHAPTER 4. SUMMARY OF THE PAPERS
calculated from MoM at low frequency. In the neighborhood of the vertices of the
triangles, the MoM current yield unreliable values. To remedy this, corrections and
smoothing have been implemented. Trends in the modified coefficients have been
studied and have allowed us to better extrapolate the current components to higher
frequency. This approach offers a way of creating new approximated currents.
As a side result, we can observe that the currents on the shadow side of a
roundish body can be modelled by these fairly simple models. Their values at
the transition region into the shadow zone are also well handled by the modified
reference models. Finally, the perpendicular component in our decomposition can
been seen as a measure of the error in the PO current. Thus this provides a
numerical procedure to automatically control the PO error.
The development of the method and the numerical simulations have been done
in close cooperation by both authors as a joined effort. The second author was the
main responsible for the implementation of the modifying coefficients. The author
of this thesis was responsible for the literature studies, the PO streamline concept,
the study of the TE-TM cases and the MoM simulations and presented this paper at
the MMWP05 Conference on Mathematical Modelling of Wave Phenomena, Växjö,
Sweden, August 2005. A shorter version of the report will appear in the proceedings
of the conference.
4.3
Paper 3: Physical Optics and NURBS
In this paper we present an implementation of the Physical Optics (PO) technique
for Radar Cross Section (RCS) application using an adaptive triangular subdivision scheme for the surface integral which arises during the computation of the
electromagnetic scattered fields.
Our interest was to assess efficiency and error analysis. Classically, the PO
surface integral is solved using quadrature formulas which require the wavelength
to be resolved, i.e. the number of elements becomes proportional to the square of
the electrical size. Instead, if we assume linear phase, we can solve the integral
analytically on fewer larger elements, whose number grows only linearly with the
electrical size. The size of the elements is determined by an adaptive scheme which
supplies control of the error during the integration. The solver includes the fast
treatment of the shadowing described in Paper 6 and uses the ray tracer on NURBS
described in Paper 5.
The author of the thesis implemented the PO solver, performed the computations, wrote the paper and presented it at the EMB04 Conference on Computational
Electromagnetics, Göteborg, Sweden, October 2004.
4.4
Paper 4: The Rescue Wing, an Engineering Application
Here we present a multi-disciplinary engineering analysis aiming at the design of a
new marine distress signaling device. The device, called "Rescue-Wing", works as
4.5. PAPER 5: MIRA, A MODULAR APPROACH TO GTD
33
an inflatable radar reflector and is intended for personal use in marine environment,
assisting in localization of persons missing at sea during rescue operations.
The Rescue-Wing is in fact an inflatable gas bag shaped like a wing providing
aerodynamic lift. Tethered to the life jacket of a person in distress, it is filled with
helium to provide aerostatic lift. The Rescue-Wing has been designed to operate
as a balloon in calm winds and, in windy conditions, like a kite. When deployed, it
will position itself in tethered flight 10-15 meters above the sea surface providing a
radar reflector target as well as a strong visual cue for detection and positioning.
The analysis has been focused on the multidisciplinary design task of combining
results from aerodynamics, flight mechanics, structures and electromagnetics into
one design.
In order to assess the Rescue-Wing’s ability to reflect radar signals, electromagnetics simulations have been conducted to predict its RCS. The computations
involved the use of the General Electromagnetic Solvers "GEMS", e.g. the PO
technique described in Paper 3 as well as the Method of Moments. We show how
these methods have been used to assist in the analysis and in the design decision
making process of the radar detectability of the Rescue-Wing, as well as how its
RCS compare to the most popular radar reflectors used on yachts and sailboats.
The first author was responsible for the aerodynamic part and presented the paper at the OCEANS 2005 Conference, Washington D.C., United States, September
2005. The author of the thesis was responsible for the analysis and the computations of the radar cross section. The introduction is a collaborative effort.
4.5
Paper 5: MIRA, a Modular Approach to GTD
In this paper we present the GTD solver MIRA: Modular Implementation of Ray
Tracing for Antenna Applications. The low cost of GTD, compared to the Method
of Moments, is due to both the fact that there is no runtime penalty in increasing
the frequency and that the ray tracing, which GTD is based on, is a geometrical
technique. The complexity is then no longer dependent on the electrical size of the
problem but instead on geometrical sub problems which are manageable.
For industrial applications the scattering geometries, with which the rays interact, are modelled by trimmed Non-Uniform Rational B-Spline (NURBS) surfaces [Piegl 91, deBoor 78] the most recent standard used to represent complex freeform geometries. In this paper we focus especially on the architecture of MIRA that
separates mathematical algorithms from their implementation details and modelling.
The part concerning the geometry has been written by the first author, the
ray-tracing part and the pictures of the rays has been done by the author of the
thesis, the application part, the introduction and the last picture has been created
by the second author.
34
4.6
CHAPTER 4. SUMMARY OF THE PAPERS
Paper 6: Architecture and Geometrical Algorithms in
MIRA
Due to the introduction of NURBS presented in Paper 5, the geometrical sub
problems tend to be mathematically and numerically cumbersome and introduce
complications such as mathematical complexity and several representations of the
same curve.
We show how proper Object Oriented programming techniques has allowed us
to restructure the ray tracer into a flexible software package. The keywords here
are portability and modularity. Implementation of these concepts was realized with
Fortran 90 because of its robustness and portability, although it does not feature
Object Orientation naturally.
A well thought-out software design allows simple and efficient implementation
of geometrical ray tracing algorithms. Our experience is that good software architecture leads to flexibility and modularity, essential in the support of future
enhancements.
As a consequence, the independent modules of MIRA make suitable platforms
for hybrid techniques in combination with other methods such as MoM and PO. In
a first innovative hybrid technique, a triangle-based PO solver uses the shadowing
information calculated with the ray tracer part of MIRA. The occlusion is performed
between triangles and NURBS surfaces rather than between pairs of triangles, thus
reducing the complexity. Then the shadowing information is used in an iterative
MoM-PO process in order to cover higher frequencies, where the contribution of
the shadowing effects, in the hybrid formulation, is believed to be more significant.
This paper was presented at the EMB01 Conference on Computational Electromagnetics, Uppsala, Sweden, November 2001.
Bibliography
[Stratton 41] J.A. Stratton.Electromagnetic Theory. McGraw-Hill, 1941.
[Rumsey 54] V. H. Rumsey. Reaction concept in electromagnetic theory. Physical
Rev. (2), 94:1483 1491, 1954.
[Keller 62] Joseph B. Keller. Geometrical Theory of Diffraction. Journal of the Optical Society of America, Vol. 52(2), pp. 116-130, February 1962.
[Kouyoumjian 65] R.G. Kouyoumjian. Asymptotic High-Frequency Methods. Proc,
IEEE, Vol.53, No. 8, pp. 864-876, August 1965.
[Ludwig 68] A. C. Ludwig, Computation of radiation patterns involving numerical
double integration, IEEE Transactions on Antennas and Propagation, pages
767–769, Nov. 1968.
[Harrington 68] R.F. Harrington. Field Computation by Moment Methods. New
York: Macmillan, 1968.
[Thiele 75] G.A. Thiele and T.H. Newhouse, A hybrid technique for combining moment methods with geometrical theory of diffraction, IEEE Trans. Antennas
Propagat., vol. AP-23, pp. 62-69, Jan. 1975.
[Burnside 75] W.D. Burnside, C.L. Yu and R.J. Marhefka, A technique to combine the geometrical theory of diffraction and moment method, IEEE Trans.
Antennas Propagat.,pp. 551-558, July 1975.
[deBoor 78] C. deBoor, A Practical Guide to Splines. Applied Mathematical Sciences 27, Springer-Verlag, New York, 1978.
[Rao 82] S. M. Rao, D. R. Wilton, and A. W. Glisson. Electromagnetic scattering
by surfaces of arbitrary shape. IEEE Transactions on Antennas and Propagations, 30(3):409418, May 1982.
[Pathak 84] R.G. Kouyoumjian and P.H. Pathak. A Uniform Geometrical Theory
of Diffraction for an Edge in a Perfectly Conducting Surface. Proc. IEEE,
Vol. 62, pp. 1448-1481, November 1984.
35
36
BIBLIOGRAPHY
[Burnside 87] I. J. Gupta, W. D. Burnside, A Physical Optics Correction for
Backscattering from Curved Surfaces, IEEE Transactions on Antennas and
Propagation, vol. 35, N0. 5, May 1987.
[Greengard 87] L. Greengard and V. Rokhlin, A fast algorithm for particle simulations, Journal of Computational Physics, 73(2):325-348, Dec. 1987.
[Bowman 87] J.J. Bowman, T.B.A. Senior, P.L.E. Uslenghi Electromagnetic and
Acoustic Scattering by Simple Shapes, HPC, 1987.
[Farin 88] Gerald Farin. Curves and surfaces for computer aided geometric design:
a practical guide. Academic Press Professional, Inc., San Diego, CA, 1988.
[McNamara 89] D.A. McNamara, C.W.I. Pistorius, J.A.G. Malherbe Introduction
to the Uniform Geometrical Theory of Diffraction, Artech House, London,
1989.
[Glassner 89] Andrew S. Glassner. An introduction to ray tracing. Academic Press
Ltd., London, UK, 1989
[Piegl 91] Les Piegl. On NURBS: A survey. IEEE Computer Graphics and Application, South Florida, 1991.
[Rahmat-Samii 91] C.S. Kim and Y. Rahmat-Samii, Low profile Antenna Study
Using the Physical Optics Hybrid Method (POHM), IEEE Antennas and
Propagation Society Int. Symp., vol.3, pp. 1350-1353, June 1991.
[Crabtree 91] Glenn D. Crabtree, A numerical quadrature technique for physical
optics scattering analysis, IEEE Transactions on Microwave Theory and Techniques, 27(5), Sep. 1991.
[Rokhlin 92] N. Engheta, W. Murphy, V. Rokhlin and V. Vassiliou, The fast multipole method (fmm) for electromagnetic scattering problems, IEEE Trans. on
Antennas and Propagat., vol 40, pp. 634-641, June 1992.
[Numer. Recipes 92] Numerical Recipes in Fortran 77. Cambridge University Press,
Volume 1, 1986-1992.
[Bouche 93] D.P. Bouche, F.A. Molinet and R. Mittra, Asymptotic and Hybrid Techniques for Electromagnetic Scattering, Proceedings of the IEEE,
vol.81(12), Dec. 1993.
[Rius 93] J.M. Rius, M. Ferrando and L. Jofre. GRECO: Graphical Electromagnetic
Computing for RCS prediction in real time. IEEE Antennas and Propagation
Magazine, vol. 35, No.2, pp. 7-17, April 1993.
[Leviatan 93] B.Z. Steinberg and Y. Leviatan, On the use of wavelet expansions in
the method of moments, IEEE Transactions on Antennas and Propagation,
vol. 41, pp. 610–619, 1993
37
[Mittra 94] Z. G. Figan, R. Mittra, A. Boag and E. Michielssen, A technique for
solving scattering problems at high frequencies, Int. URSI Symp., Seattle WA,
June 1994.
[Moreira 94] F.J.S Moreira and A. Prata. A self-checking predictor-corrector algorithm for efficient evaluation of reflector antenna radiation integrals, IEEE
Transactions on Antennas and Propagation, 42(2):246–254, Feb. 1994.
[Gordon 94] William B. Gordon, High Frequency Approximations to the Physical
Optics Scattering Integral, IEEE Transactions on Antennas and Propagation,
42(3), Mar. 1994.
[Catedra 95] M. Domingo, F. Rivas, J.Perez, R.P. Torres, M.F. Catedra. RANURS:
Computation of the RCS of Complex Bodies Modelling Using NURBS Surfaces. IEEE Antennas and Propagation Magazine, vol. 37, No. 6, December
1995.
[Aberegg 95] K.R. Aberegg and A.F. Peterson, ”Application of the Integral
Equation-Asymptotic Phase Method to Two-Dimensional Scattering”, IEEE
Trans. on Antennas and Propagat., vol. 43, pp. 534-537, May 1995.
[Jakobus 95] U. Jakobus and F. M. Landstorfer, Improved PO-MM Hybrid Formulation for Scattering from Three-Dimensional Perfectly Conducting Bodies of
Arbitrary Shape, IEEE Transactions on Antennas and Propagation vol. 43,
pp. 162–169, February 1995.
[Taflove 95] A.Taflove. Computational Electro-dynamics: The Finite-Difference
Time-Domain Method, Artec House, 1995.
[Asvestas 95] J. S. Asvestas, The Physical-Optics Integral and Computer Graphics,
IEEE Trans. on Antennas and Propagat., vol.43(12), Dec. 1995.
[Altman 96] Z. Altman, R. Mittra, O. Hashimoto and E. Michielssen, Efficient
representation of the induced currents on large scatterers using the generalized
pencil of function method, IEEE Trans. on Antennas and Propagat., vol.44(1),
Jan. 1996.
[Hodges 97] R.E. Hodges and Y. Rahmat-Samii, An iterative current-based hybrid
method for complex structures, IEEE Trans. Ant. Propagat. 45 1997.
[Jackson 98] J. D. Jackson. Classical Electrodynamics. 3rd ed. New York: Wiley,
p. 177, 1998.
[Mittra 98] Mittra R., Peterson, A.F. and Ray S.L.. Computational Methods for
Electromagnetics. IEEE Press, 1998.
[Catedra 98] M.F Catedra, J. Perez, I. Gonzalez, I. Gutierrez, F. Saez de Adana.
FASANT (Version S.4) Theoretical Foundations. Signal Theory and Communications Dept., University of Alcala. 1998.
38
BIBLIOGRAPHY
[Altman 99] Z. Altman and R. Mittra,A technique for Extrapolating Numerically Rigourous Solutions of Electromagnetic Scattering Problems to Higher
Frequencies and Thier Scaling Properties, IEEE Trans. on Antennas and
Propagat., vol.47(4), April 1999.
[Fares 99] A. Bendali, M.B. Fares, CESC: CERFACS Electromagnetics Solver
Code. Technical Documentation TR/EMC/99/52, Toulouse, France, 1999.
[Bendali 99] A. Bendali, The Rumsey reaction principle. Lecture notes 1999.
[Oppelstrup 99] R. Buch, J. Long, J. Oppelstrup PSCI Progress Report 1997-1999.
PSCI, KTH, pp 70-82, 1999.
[Kwon 00] D. Kwon, Efficient Method of Moments formulation for large conducting
scattering problems using asymptotic phasefront extraction, Ph.D. dissertation, Dept. Elect. Eng., The Ohio State University, Colombus, OH, 2000.
[Taboada 00] F. Obelleiro, J.M. Taboada, J.l. Rodriguez, J.O. Rubinos and A.M.
Arias, Hybrid moment-method physical optics formulation for modeling the
electromagnetic behavior of on-boaerd antennas, Microwave Opt. Tech. Letter
27,pp. 88-93, 2000.
[Nilsson 00] Martin Nilsson, A fast multipole accelerated block quasi minimum residual method for solving scattering from perfectly conducting bodies, Ant. and
Propag. Society International Symposium No 4, 2000.
[Andersson 01] U. Andersson. Time-Domain Methods for the Maxwell Equations.
Ph.D Thesis, KTH, Stockholm, 2001.
[Ledfelt 01] G. Ledfelt. Hybrid Time-Domain Methods and Wire Models for Computational Electromagnetics. Ph.D Thesis, KTH, Stockholm, 2001.
[Edlund 01] J. Edlund. A Parallel, Iterative Method of Moments and Physical Optics Hybrid Solver for Arbitrary Surfaces. Licentiate Thesis, Uppsala University, 2001.
[Kwon 01] D. Kwon, R.J. Burkholder and P. H. Pathak, Efficient Method of Moments Formulation for Large PEC Scattering Problems Using Asymptotic
Phasefront Extraction (APE), IEEE Trans. on Antennas and Propagat., vol.
49, No.4, April, 2001.
[Taboada 01] J. M. Taboada, F. Obelleiro, and J. L. Rodrígeuz. Improvement of
the hybrid moment method-physical optics method through a novel evaluation
of the physical optics operator. Microwave and Optical Technology Letters.,
30(5):357–363, 2001.
39
[Sarkar 02] C. Su, T.K. Sarkar, Adaptive Multiscale Moment Method (AMMM) for
Analysis of Scattering from Three-Dimensional Perfectly Conducting Structures, IEEE Transactions on Antennas and Propagation, vol. 50, N0. 4, April
2002.
[Edelvik 02] F. Edelvik. Hybrid Solvers for the Maxwell Equations in TimeDomain. Ph.D Thesis, Uppsala University, 2002.
[Sefi 03] S. Sefi. Ray Tracing Tools for High Frequency Electromagnetics Simulations. Licentiate thesis, KTH, Stockholm, 2003.
[Abenius 04] E. Abenius. Time-Domain Inverse Electromagnetic Scattering using
FDTD and Gradient-based Minimization. Licentiate Thesis, KTH, Stockholm, 2004.
[Djordjevic 04] M. Djordjevic and B.M. Notaros, Higher Order Hybrid Method of
Moments-Physical Optics Modeling Technique for Radiation and Scattering
from Large Perfectly Conducting Surfaces, IEEE Transactions on Antennas
and Propagation, Feb 2004.
[Nilsson 04] M. Nilsson. Fast Numerical Techniques for Electromagnetic Problems
in Frequency Domain. Ph.D Thesis, Uppsala University, 2004.
[Hagdahl 05] S. Hagdahl. Hybrid Methods for Computational Electromagnetics in
Frequency Domain. Ph.D Thesis, KTH, Stockholm, 2005.
[Taboada 05] J. M. Taboada, F. Obelleiro, J. L. Rodrígeuz, I. Garcia-Tunon and L.
Landesa, Incorporation of Linear-Phase Progression in RWG basis functions,
Microwave and Optical Technology Letters., 44(2), Jan. 2005.
[1]
CVS, the Concurrent Versions System:
http://www.cvshome.org
[2]
netCDF, the network Common Data Form:
http://www.unidata.ucar.edu/packages/netcdf
[3]
Matlab, the Matrix laboratory:
http://www.mathworks.com
[4]
OpenDX, the Open Visualisation Data Explorer:
http://www.opendx.org
[5]
CADfix: TranscenData
http://www.cadfix.com