Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Mathematical descriptions of the electromagnetic field wikipedia , lookup
Centrifugal force wikipedia , lookup
Relativistic quantum mechanics wikipedia , lookup
Friction-plate electromagnetic couplings wikipedia , lookup
Multiferroics wikipedia , lookup
Magnetic monopole wikipedia , lookup
Magnetoreception wikipedia , lookup
Magnetohydrodynamics wikipedia , lookup
Electromagnet wikipedia , lookup
Magnetochemistry wikipedia , lookup
Electromagnetic field wikipedia , lookup
Electromagnetism wikipedia , lookup
Eddy current wikipedia , lookup
Force between magnets wikipedia , lookup
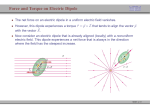
Electromagnetic drag on a magnetic dipole near a translating conducting bar Maksims Kirpo, Saskia Tympel, Thomas Boeck, Dmitry Krasnov, and André Thess Citation: J. Appl. Phys. 109, 113921 (2011); doi: 10.1063/1.3587182 View online: http://dx.doi.org/10.1063/1.3587182 View Table of Contents: http://jap.aip.org/resource/1/JAPIAU/v109/i11 Published by the American Institute of Physics. Related Articles Loss characterization of Mo-doped FeNi flake for DC-to-DC converter and MHz frequency applications J. Appl. Phys. 111, 07E329 (2012) The electron cyclotron resonance ion source with arc-shaped coils concept (invited) Rev. Sci. Instrum. 83, 02A312 (2012) Mid-infrared artificial magnetism directly from magnetic field coupling J. Appl. Phys. 110, 093907 (2011) Effective cancellation of residual magnetic interference induced from a shielded environment for precision magnetic measurements Appl. Phys. Lett. 99, 132506 (2011) Kilohertz magnetic field focusing in a pair of metallic periodic-ladder structures Appl. Phys. Lett. 99, 093501 (2011) Additional information on J. Appl. Phys. Journal Homepage: http://jap.aip.org/ Journal Information: http://jap.aip.org/about/about_the_journal Top downloads: http://jap.aip.org/features/most_downloaded Information for Authors: http://jap.aip.org/authors Downloaded 24 Apr 2012 to 141.24.81.72. Redistribution subject to AIP license or copyright; see http://jap.aip.org/about/rights_and_permissions JOURNAL OF APPLIED PHYSICS 109, 113921 (2011) Electromagnetic drag on a magnetic dipole near a translating conducting bar Maksims Kirpo, Saskia Tympel, Thomas Boeck, Dmitry Krasnov, and André Thessa) Institute of Thermodynamics and Fluid Mechanics, Ilmenau University of Technology, P.O. Box 100565, 98684 Ilmenau, Germany (Received 27 January 2011; accepted 4 April 2011; published online 13 June 2011) The electromagnetic drag force and torque acting on a magnetic dipole due to the translatory motion of an electrically conducting bar with square cross section and infinite length is computed by numerical analysis for different orientations and locations of the dipole. The study is motivated by the novel techniques termed Lorentz force velocimetry and Lorentz force eddy current testing for noncontact measurements of the velocity of a conducting liquid and for detection of defects in the interior of solid bodies, respectively. The present, simplified configuration provides and explains important scaling laws and reference results that can be used for verification of future complete numerical simulations of more realistic problems and complex geometries. The results of computations are also compared with existing analytical solutions for an infinite plate and with a newly developed asymptotic theory for large distances between the bar and the magnetic dipole. We finally discuss the optimization problem of finding the orientation of the dipole relative to the C 2011 American Institute of bar that produces the maximum force in the direction of motion. V Physics. [doi:10.1063/1.3587182] I. INTRODUCTION The present work is devoted to the theoretical investigation of a conceptually simple prototype problem for Lorentz force velocimetry (LFV) and Lorentz force eddy current testing (LET). LFV is a modern, contactless technique for measuring flow rates and velocities of moving conducting liquids. It can be used in situations where mechanical contact of a sensor with the flowing medium must be avoided due to environmental conditions (high temperatures, radioactivity) and chemical reactions.1 Possible applications include flow measurement during the continuous casting of steel, in ducts and open channel flows of liquid aluminum alloys in aluminum production,2 and in other metallurgical processes where hot liquid metal or glass flows are involved. LET can serve as a basic tool for detecting subsurface defects such as cracks in metallic constructions where these defects are critical for safety, e. g. air and railroad transport, engines, bridges, etc. LFV is not the only one known technique for flow rate measurements in opaque conducting liquids,3 however none of these known techniques have found commercial realtime application in metallurgy. Invasive probes, such as the Vives’ probes5 or mechanical reaction probes,4 are not very suitable for flow rate measurements at high temperatures because they require direct contact between the sensor and the often aggressive liquid metal. Ultrasound sensors6 have similar problems, but can be used for hot melts with temperatures up to 800 C.7 Commercially available electromagnetic flowmeters8,9 are often not usable either, since heavy working conditions are typical for metallurgical applications. Inductive flow tomography10 can sometimes be used for reconstruction of the melt flow structure in closed ducts. This technique, however, is too complex to be applied for simple flow metering and requires a) Author to whom correspondence should be addressed. Electronic mail: [email protected]. 0021-8979/2011/109(11)/113921/11/$30.00 solution of inverse problems. So its adaption to industrial processes seems to be overly complicated. At the origin of LFV and LET is Lenz’ rule of magnetic induction. Its application for flow rate measurement was already proposed by Shercliff.8 Eddy currents are induced in a conductor, which is moving in an external (primary) magnetic field. The interaction of these eddy currents with the primary magnetic field depicted in Fig. 1(a) creates a force that opposes the motion according to Lenz’ rule. The magnetic system, which creates the primary magnetic field, experiences a drag force acting along the direction of the conductor motion. Simple estimations show that this force is F rvB2 , where r is the electrical conductivity of the moving conductor, v is the magnitude of the velocity and B is the magnitude of the magnetic induction. Measuring this force, acting on the magnetic system, allows us to measure the velocity of the moving conductor with high accuracy. Since the drag force is proportional to the square of the magnetic induction, it is possible to improve the sensitivity of the measurement technique by increasing the magnetic field intensity in the case when the velocity is independent of the magnetic field, i. e., for solid bodies and duct flows with small Hartmann number. The method, therefore, can be applied to poorly conducting substances like electrolytes, ceramics or glass melts. However, this still requires further research on the proper magnetic system design and optimization as well as an accurate and advanced force measurement system. In general, one cannot find an analytical solution for the force acting on a realistic magnet system even when the motion of the conducting body is very simple. Only a few cases, which replace the real magnet system by a magnetic dipole or a simple coil, are known to have analytical solutions.11–15 However, these simplified problems are of great importance for the theories of LFV because they allow a deeper understanding of the involved processes and provide reference data for complex numerical simulations. 109, 113921-1 C 2011 American Institute of Physics V Downloaded 24 Apr 2012 to 141.24.81.72. Redistribution subject to AIP license or copyright; see http://jap.aip.org/about/rights_and_permissions 113921-2 Kirpo et al. J. Appl. Phys. 109, 113921 (2011) BðrÞ ¼ FIG. 1. Sketch of the studied problem (left) and parameters of the geometry (right). In the present paper, we consider a moving electrically conducting bar with infinite length and square cross section, subjected to the field produced by a magnetic dipole. This problem represents a canonical problem for LFV and LET theory. It generalizes the case of an infinite conducting plate which can be treated analytically.13,15 Its solution can be directly compared with results obtained from LVF and LET applications for duct flows and solids without defects, respectively. The paper is organized as follows: The next section will provide a brief theoretical description of the problem and explain approaches used for the numerical solution; Sec. III will give an overview and analysis of the obtained numerical results and discuss the discovered dependencies in detail. Section IV will introduce the asymptotic theory which explains the behavior of the Lorentz force when the dipole is far away from the bar. Finally, conclusions and further steps of research will be discussed. II. FORMULATION AND NUMERICAL SOLUTION OF THE PROBLEM We consider an electrically conducting nonmagnetic infinite solid bar with a square cross section d d [Fig. 1(b)] which is moving with a constant velocity v ¼ v ex in x direction in the field B of a magnetic dipole with the magnetic dipole moment m ¼ mðkx ex þ ky ey þ kz ez Þ and kx2 þ ky2 þ kz2 ¼ 1. Our ultimate goal is to compute the electromagnetic drag force and torque acting on the dipole for arbitrary dipole location and orientation. The bar translating in the direction orthogonal to its cross section is of primary interest for basic LET configurations. Besides that, it can also be viewed as the first approximation of the mean velocity distribution in a turbulent duct flow with the average velocity v under constant pressure gradient in x direction. The latter, i.e., determination of the average duct flow velocity, is the main task of LFV. Hence, the solution of the moving bar problem is aimed toward a better understanding of LFV principles for fluid flows. With this particular motivation in mind, we do not consider other possible translatory motions of the bar in the present work. The magnetic field of the dipole at the point r is given by16 l0 h r mi 3ðm rÞ 5 3 4p r r (1) assuming that the origin of the coordinate system corresponds to the dipole location. Eddy currents are induced in the bar when it crosses the magnetic field lines. They create a secondary magnetic field b which in this work is assumed to be just a very small perturbation of the external field. This is satisfied in the quasistatic approximation,17 i.e., when the magnetic diffusion time is small compared to the advection time L/v by the velocity v. The length scale L corresponds to the variation scale of the external field, i. e., distance between the dipole and the bar h. The estimation of the magnetic diffusion time is less obvious but its upper limit should be based on the same length scale L ¼ h.18 The assumptions of the quasistatic approximations are then satisfied when the magnetic Reynolds number Rm ¼ l0 rvL is less than unity, where r denotes the electric conductivity. Additionally we consider the so-called kinematic problem where the motion of the bar (velocity v) is prescribed. For further formulation of the problem and presentation of the numerical results we will use nondimensional units based on the characteristic length L0 ¼ d, characteristic velocity equal to the bar velocity V0 ¼ v and the characteristic magnetic field intensity B0 ¼ l0 md3 . This choice of the characteristic parameters leads to the following expressions for the current density j ¼ rvl0 md 3 j and Lorentz force F ¼ rvl20 m2 d 3 F where “star” symbol represents nondimensional quantities. This presentation of the force F allows us to express F as a function of the dipole orientations k ¼ m ¼ ðkx ; ky ; kz Þ, distance between the dipole and the bar h ¼ h=d and the dipole displacement in y direction F ¼ F ðkx ; ky ; kz ; h ; y Þ. Similarly, the torque is defined as T ¼ rvl20 m2 d 2 T and T ¼ T ðkx ; ky ; kz ; h ; y Þ. From now only nondimensional variables will be used and the “star’’ symbol will be omitted below. In the quasistatic approximation, the electric field can be represented as the gradient of the electrical potential /. The induced current density can be expressed by Ohm’s law for a moving conductor as: j ¼ r/ þ v B: (2) The moving bar is electrically neutral and according to the conservation of electric charge, the induced currents should be divergence-free. Hence, the Poisson equation for electrical potential can be obtained taking the divergence of Ohm’s law (2). Since the magnetic field of the dipole (1) is irrotational (r B ¼ 0) and the velocity distribution is uniform, the electrical potential satisfies the Laplace equation: r2 / ¼ 0: (3) A solution of this equation is required to obtain the eddy currents using Eq. (2). Appropriate boundary conditions (BC) require zero normal currents on all side surfaces of the bar, i. e., j n ¼ 0. We also require that the electrical potential and currents should vanish at the remote ends, i. e., at x ! 61. The braking Lorentz force and torque acting on the bar are given by the volume integrals Downloaded 24 Apr 2012 to 141.24.81.72. Redistribution subject to AIP license or copyright; see http://jap.aip.org/about/rights_and_permissions 113921-3 Kirpo et al. Fbar ¼ Tbar ¼ J. Appl. Phys. 109, 113921 (2011) ð j B dV and ðV r ðj BÞdV: (4) V By virtue of Newton’s third law, an opposite force and torque act on the dipole. This force and torque on the dipole are of equal magnitude as Fbar and Tbar . They are given by the formulas F ¼ ðk rÞb and T ¼ k b. The secondary magnetic field b in these expressions is produced by the induced currents in the moving bar. It can be computed at the location of the dipole using the Biot-Savart law. Our attempt to find a general analytical solution of the Laplace equation with the described BC was not successful. TM For this reason an automated Matlab script coupled with the TM Comsol FEM Laplace “pardiso” solver19 was used to solve the problem numerically for the electrical potential using second-order Lagrangian elements.20 The elementary force and torque from every current carrying element of the bar were evaluated and the total force and torque values were obtained taking the volume integral. All integration procedures were TM implemented using built-in Comsol functions. Preliminary computations showed that the accurate solution of the problem requires a very fine grid in the zone of large magnetic field gradients if the dipole is very close to the bar, i. e., h 1 and hmin ¼ 0:01. Therefore, a refined grid was used for simulations as shown in Fig. 2. We have verified by a grid convergence study that computational accuracy is within 5% if the distance between the dipole and the top surface of the moving bar h equals the doubled characteristic size of the element. The computational grid was further refined for very small h 8 102 . The maximal number of elements in the grid was around 105. A second numerical approach has been used to verify the asymptotic theory presented later in section IV for large distances between the dipole and the bar. This approach is based on an in-house finite-difference code for the direct numerical simulation of turbulent magnetohydrodynamic flows.21 The numerical scheme is of second order with collocated grid arrangement. It has very good conservation properties for mass, momentum and electric charge thanks to the particular formulations of the discrete equations proposed in references.22,23 The Poisson equation is solved with the Poisson solver FishPack. Verifications of this code versus a spectral code and details on the algorithms can be found in Krasnov et al.21 The code computes force and torque by the volume integrals (4) with the trapezoidal rule. This in-house code was adapted to simulate a solid bar because it can use much larger structured grids than Comsol, which is important for h 1 cases. To resolve all the effects in the case of large distances h the length of the solid bar was chosen to be proportional to the distance to the dipole, i. e., it was 7.5ph. The code used periodic boundary conditions at x ¼6 7.5ph/2 for electrical potential. They did not influence the obtained solution due to sufficient length of the computational domain. The numerical resolution of the uniform mesh was 8192 256 256 points in x, y, z in all simulations for h 1. FIG. 2. Examples of the refined grid used for numerical simulations with Comsol (the full bar size is 7:5 1 1) (a) is in a plane z = const. and (b) in a plane x = const. III. NUMERICAL RESULTS A. Magnetic dipole in the plane y 5 0 We begin the discussion of the numerical results for the solid bar with a reference case for which an analytical result is available. This reference case is a translating infinite plate of unit thickness, whereas the dipole is vertically oriented.13 The analytical formulas for the x component of the force and the y component of the torque are " # 1 h3 0 ; (5) 1 Fx ¼ 128ph3 ð1 þ hÞ3 " # 1 h2 0 : (6) 1 Ty ¼ 128ph2 ð1 þ hÞ2 For this case, the components of the magnetic moment are k ¼ (0, 0, 1) in our nondimensional representation, and we can compare our simulation results directly by evaluating the ratios Fx =F0x and Ty =Ty0 for different h, as shown in Fig. 3. As expected, the force and torque ratios decrease monotonously as h increases. When h tends to zero, i. e., the magnetic dipole approaches the top surface of the bar, the curves reach unity. This behavior agrees with our expectations Downloaded 24 Apr 2012 to 141.24.81.72. Redistribution subject to AIP license or copyright; see http://jap.aip.org/about/rights_and_permissions 113921-4 Kirpo et al. because the rectangular bar acts on the dipole exactly as the infinite plate if the dipole is very close to its surface. If the dipole is moved to a new position away from the bar, then the force ratio starts to decay until it reaches very small values. This is because the “useful” volume, which the magnetic dipole interacts with, decreases, too. This is, clearly, a distinct feature of the rectangular bar compared to the infinite plate. The data for h > 2 indicate a transition to scaling behavior for large distances, and the ratios Fx =F0x and Ty =Ty0 are related by a constant factor in this range. It can also be noticed that the two curves start to decay at somewhat different values of h with the torque ratio Ty =Ty0 decaying earlier. The critical distance when the influence of the translating bar can be approximated by the infinite plate Eqs. (6) and (7) within 1% error is hC 0:1. We consider now the influence of dipole orientation. As the first step, we focus on the cases when the dipole is aligned with one of the coordinate axes (main orientations), i. e. (1, 0, 0), (0, 1, 0), and (0, 0, 1). These results (integral force and torque) are shown in Figs. 4 and 5. They are tabulated also for other selected ðkx ; ky ; kz Þ in Tables I and II. It can be seen that the other orientations of the magnetic dipole provide smaller values of the Lorentz forces compared with FIG. 3. Ratios of nondimensional forces Fx =F0x and torques T=Ty0 acting on a magnetic dipole located at x ¼ 0, y ¼ 0 for different h and oriented perpendicular to the closest surface, i. e., k ¼ (0, 0, 1). J. Appl. Phys. 109, 113921 (2011) FIG. 4. Nondimensional force Fx acting on the magnetic dipole located at x ¼ 0, y ¼ 0 for different h and dipole orientations. the vertically oriented dipole if it is placed in the lateral midplane of the bar y ¼ 0. For example, the Lorentz force on a dipole oriented in y direction is approximately equal to 25% of the force for a vertically oriented dipole. One might guess that this is due to the lower external field intensity at the base point on the bar beneath the dipole, which is indeed twice lower for the y orientation (0, 1, 0) than for the z orientation. However, this argument seems misleading because the same reduction in the field strength for the x orientation reduces the force only to about 75% of the value obtained for vertically oriented dipole. The spatial organization of the induced currents is therefore decisive for the actual force. We illustrate the influence of the dipole orientation on the current density distribution on the surface of the bar in Fig. 6. It can be noticed that the current density magnitude for (1, 0, 0)-oriented dipole is higher than for (0, 1, 0)-oriented dipole and the current density maximum is better localized in the region of the highest magnetic field intensity for the dipole with (1, 0, 0)-orientation. An analytical solution by Priede et al.15 for Lorentz force in a layer of infinite horizontal extent and arbitrary depth produced by a dipole of FIG. 5. Absolute values of nondimensional torque Ty acting on the magnetic dipole with any k ¼ ðkx ; 0; kz Þ, kx2 þ kz2 ¼ 1 located at x ¼ 0, y ¼ 0 for different h. Downloaded 24 Apr 2012 to 141.24.81.72. Redistribution subject to AIP license or copyright; see http://jap.aip.org/about/rights_and_permissions 113921-5 Kirpo et al. J. Appl. Phys. 109, 113921 (2011) TABLE I. Values of the nondimensional force Fx acting on the magnetic dipole located at x ¼ 0, y ¼ 0 for selected h and dipole orientations. h 0.02 0.10 0.20 0.50 1.00 2.00 5.00 10.0 (0, 0, 1) (0, 1, 0) (1, 0, 0) pffiffiffiffiffiffiffi pffiffiffiffiffiffiffi ð0; 0:5; 0:5Þ pffiffiffiffiffiffiffi pffiffiffiffiffiffiffi ð 0:5; 0; 0:5Þ pffiffiffiffiffiffiffi pffiffiffiffiffiffiffi ð 0:5; 0:5; 0Þ pffiffiffiffiffiffiffiffi pffiffiffiffiffiffiffiffi pffiffiffiffiffiffiffiffi ð 1=3; 1=3; 1=3Þ 3:11 102 2:46 100 2:80 101 1:01 102 4:12 104 9:53 106 3:51 108 3:74 1010 7:83 101 5:98 101 5:75 102 1:20 103 3:91 105 9:64 107 3:83 109 4:15 1011 2:34 102 1:85 100 2:02 101 6:56 103 2:59 104 5:99 106 2:22 108 2:37 1010 1:95 102 1:53 100 1:69 101 5:63 103 2:26 104 5:25 106 1:95 108 2:08 1010 2:73 102 2:16 100 2:41 101 8:31 103 3:35 104 7:76 106 2:87 108 3:05 1010 1:56 102 1:22 100 1:30 101 3:88 103 1:49 104 3:48 106 1:30 108 1:39 1010 2:08 102 1:64 100 1:80 101 5:94 103 2:37 104 5:50 106 2:04 108 2:17 1010 arbitrary orientation shows the same Lorentz force dependence on dipole orientation.24 Different orientations of the dipole can break the symmetry in current density distributions as shown in Figs. 6(d) and 6(e). In such cases not only the main Fx force pffiffiffiffiffifficomponent ffi pffiffiffiffiffiffiffi appears. The simulations have shown, that for ð 0:5; 0:5; 0Þ the force component Fy is present as well. Although it has a is the smaller absolute value than Fx, the order pffiffiffiffiffiffiffiof magnitude pffiffiffiffiffiffiffi same. If the dipole is oriented as ð 0:5; 0; 0:5Þ, then the force component Fy vanishes. Instead a smaller attractive force Fz between the dipole and the bar appears. It is at least one order of magnitude smaller than Fx. It is also interesting to note that the maximal values of the torque component Ty are obtained when the magnetic dipole has ky ¼ 0, i. e., it is oriented in xz-plane only as it is shown in Table II. Moreover, these Ty values are equal within the accuracy of numerical results for different dipole orientations with ky ¼ 0 and kx2 þ kz2 ¼ 1 in the xz-plane. The translational motion of the conducting bar tries to rotate the dipole located in xz-plane around the y axis with a constant torque for given h. This result can be used for rotary flow meters where flow rate is determined by measuring the rotation frequency of a freely rotating magnet placed near the channel. A constant torque has also been noted by Priede et al.,14 where an analytical solution for the angular velocity of a long rotating cylindrical magnet above a translating conducting layer is obtained in two-dimensional approximation. A partial explanation of these results follows simply from inspection of the formula T ¼ k b for the torque on the dipole. We can see that Ty ¼ kz bx kx bz vanishes if the dipole is oriented in y direction, i. e., k ¼ (0, 1, 0). However, the fact that the torque stays the same for any orientation with ky ¼ 0 and kx2 þ kz2 ¼ 1 is not obvious. Equation (4) gives Ty ¼ ð ðrz fx rx fz ÞdV; (7) V where r is taken in the coordinate system whose origin corresponds to the dipole. The integrated torque Ty thus contains contributions from spatial distributions of the Lorentz force densities fx and fz in the bar. Figure 7 shows the force density integrated in every cross section ðð fi dy dz; i ¼ x; y; z (8) vi ¼ depending on the coordinate x for the magnetic dipole with k ¼ ð1; 0; 0Þ. It can be clearly seen that the integrals vx and vz are approximately of same order of magnitude and the integral vy vanishes. The total force in vertical direction ð (9) Fz ¼ vz dx vanishes because vz is an antisymmetric function. But the product rx fz always has a positive value which contributes to the torque Ty. Both products rz fx and rx fz balance in a way that the integrated torque Ty remains constant for any dipole orientation with ðkx ; 0; kz Þ, kx2 þ kz2 ¼ 1. The same applies for the infinite plate as shown by Priede et al.15 Their analytical result for Ty depends on the sum ðkx2 þ kz2 Þ only. After examination of the orientation, we finally comment on the asymptotic behavior of force and torque with the distance h. The double logarithmic representations in Figs. 4 and 5 reveal different power law approximations for different distances h. The power law fitting provides Fx h3 , Ty h2 for small h and Fx h7 , Ty h6 for large h. It can be noticed that these estimations exactly correspond to Eqs. (5) and (6) for the infinite plate in small h region. TABLE II. Values of the nondimensional torque Ty acting on the magnetic dipole located at x ¼ 0, y ¼ 0 for selected h and dipole orientations. h 0.02 0.10 0.20 0.50 1.00 2.00 5.00 10.0 (0, 0, 1) (0, 1, 0) (1, 0, 0) pffiffiffiffiffiffiffi pffiffiffiffiffiffiffi ð0; 0:5; 0:5Þ pffiffiffiffiffiffiffi pffiffiffiffiffiffiffi ð 0:5; 0; 0:5Þ pffiffiffiffiffiffiffi pffiffiffiffiffiffiffi ð 0:5; 0:5; 0Þ pffiffiffiffiffiffiffiffi pffiffiffiffiffiffiffiffi pffiffiffiffiffiffiffiffi ð 1=3; 1=3; 1=3Þ 6:22 100 2:38 101 4:52 102 2:99 103 2:01 104 8:10 106 6:70 108 1:37 109 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 6:20 100 2:30 101 4:62 102 3:01 103 2:01 104 8:11 106 6:71 108 1:37 109 3:11 100 1:19 101 2:26 102 1:50 103 1:00 104 4:05 106 3:35 108 6:84 1010 6:21 100 2:34 101 4:57 102 3:00 103 2:01 104 8:11 106 6:71 108 1:37 109 3:10 100 1:15 101 2:31 102 1:50 103 1:01 104 4:06 106 3:36 108 6:87 1010 4:14 100 1:56 101 3:05 102 2:00 103 1:34 104 5:41 106 4:47 108 9:13 1010 Downloaded 24 Apr 2012 to 141.24.81.72. Redistribution subject to AIP license or copyright; see http://jap.aip.org/about/rights_and_permissions 113921-6 Kirpo et al. J. Appl. Phys. 109, 113921 (2011) FIG. 6. Contours of the nondimensional current density magnitudes and current density vectors on the top surface (z ¼ 1/2) of the bar for h ¼ 0.2 and different orientations of the magneticpdipole. Only the central of the surface is shown. ffiffiffi pffiffipart ffi pffiffiffi The different dipole orientations are (1,0,0) for case (a), (0,1,0) for case (b), (0,0,1) for case (c), (1,1,0)/ 2 for case (d), (1,0,1)/ 2 for case (e), and (0,1,1)/ 2 for case (f). However, the Lorentz force and torque decay faster for moving solid bar than for infinite plate for large h and the Fx h7 dependence for large h is not so obvious. B. Magnetic dipole in cross-sectional plane x 5 0 Since the conducting bar has infinite length, the results are independent of the positions of the dipole along the length of the bar. However, the Lorentz force Fx should change if the dipole is shifted from the symmetry plane y ¼ 0. The presented numerical approach allows us to study this dependence of Fx on the coordinates y and z of the dipole. Pairs of y > 0 and z > 0 values are selected in the x ¼ 0 plane, and the Lorentz force is computed for three main orientations of the dipole. The decay of the Lorentz force is fast and the distribution of the decimal logarithm of the force magnitude allows better resolution of the Fx ðy; zÞ distributions. It can be seen that for the dipole with k ¼ (1, 0, 0) the distribution of Fx ðy; zÞ is completely symmetric about the diagonal y ¼ z as shown in Fig. 8. For the dipole with k ¼ (0, 0, 1) the force distribution Fx ðy; zÞ keeps the symmetry with respect to the y ¼ 0 plane only as it is shown on Fig. 9. These distributions of Fx ðy; zÞ are compatible with the previously described results: the Lorentz force has the smallest value if the dipole is oriented in y direction, i. e., the isolines of the same force magnitude are closer to the surface of the bar. The force distribution Fx ðy; zÞ for the dipole with k ¼ (0, 0, 1) also represents the results for the dipole with k ¼ (0, 1, 0) upon reflection around the diagonal. The nondimensional Lorentz force depends on position of the dipole and on its orientation. It is therefore natural to inquire about the optimal orientation of the dipole for the given positions ðy; hÞ, which gives the largest force component Fx. In the present mathematical model, the induced currents are a linear functional of the applied magnetic field, and the induced magnetic field is neglected in the Lorentz force. For these reasons, the Lorentz force depends quadratically on the applied field. The integrated Lorentz force components are therefore quadratic forms of the dipole orientation vector ðkx ; ky ; kz Þ. In particular, Fx ¼ kiT Aij kj ; (10) where summation on the repeated indices is understood. If the eigenvalue problem Aa ¼ ka is solved,25 then the eigenvector a which corresponds to the largest eigenvalue max(k) of the matrix Aij provides orientation of the dipole with the largest force component Fx. The matrix Aij is symmetric and its six independent elements can be computed using the data from force computations for six different dipole orientations and solving the obtained linear equation system. We have verified that the dipole orientation ðkx ; ky ; kz Þmax , which provides the maximum force Fx, has kx ¼ 0 within the accuracy of numerical results. For different ðy; hÞ pairs the components ky and kz, providing the maximum Lorentz force, are different, requiring tilting of the dipole by a certain angle h between the z axis and direction of the dipole which lies in x ¼ 0 plane. This definition of h is sketched in Fig. 10. Downloaded 24 Apr 2012 to 141.24.81.72. Redistribution subject to AIP license or copyright; see http://jap.aip.org/about/rights_and_permissions 113921-7 Kirpo et al. J. Appl. Phys. 109, 113921 (2011) ÐÐ FIG. 7. Force density integrals vi ¼ fi dy dz, i ¼ x, y, z depending on the coordinate x for the dipole with k ¼ (1, 0, 0) and h ¼ 0.2. The computed eigenvectors with orientations ð0; ky ; kz Þmax are shown in Fig. 11 where every arrow represents direction of the optimal orientation for the dipole located at certain y and h. The angle h between z axis and direction of the eigenvector is shown in Fig. 12 for all studied ðy; hÞ values and in Fig. 13 for two selected distances h. The angle h varies from almost zero for vertical dipole orientation k ¼ (0, 0, 1) at y ¼ 0 and any h to more than 50 for large y and small h. If the dipole is placed very close to the surface of the bar (h ! 0) then the angle h remains small with increasing y until the edge of the bar, i. e., while y < 0.5, and changes rapidly to 50 at y > 0.5 as it is shown in Fig. 13. If the dipole is located at larger h, then the angle h increases monotonously with y. It can be seen that if y or h becomes large, i. e., the dipole is placed very far away from the bar, then its orientation providing the maximum Lorentz force points to the location of the bar. Several numerical simulations were performed for the selected pairs of points (y, h) to verify that the obtained dipole orientation provides the largest Lorentz force Fx. The results of force comparison are combined into Table III and clearly show that the Lorentz force for the optimal orientation of the dipole is always a little greater than the force computed for other selected direction of the dipoles in this point, e. g. the difference is almost 12% at point (y, h) ¼ (0.4, 0.4), which can be significant for LFV application for very small velocity measurements or cases with small electrical conductivity. However, in LFV applications it could be difficult to realize different orientations of magnetization for the real magnets due to their finite size. FIG. 8. Decimal logarithm of the force magnitude distribution for nondimensional force Fx ðy; zÞ, k ¼ (1, 0, 0). The gap in the isoline closest to the bar is due to computational reasons. explained with the help of asymptotic expansions in the small parameter e: ¼ 1/h. Alternatively, the asymptotic approach can be regarded as a long-wave expansion along the length of the bar. The goal of our asymptotic approach is to estimate the Lorenz force Fx acting on the dipole for h 1. We assume that the dipole is placed in the symmetry plane y ¼ 0 but allow for arbitrary dipole orientation. The asymptotic solution is based on the rescaled coordinates x ¼ h^ x, y ¼ y^, z ¼ ^z, whereby one can exploit the slow IV. ASYMPTOTIC THEORY FOR LARGE h The decay of the Lorentz force with the power h7 at large distances is more rapid than one would expect from a simple estimate. The straightforward estimation would involve Fx B20 V based on a characteristic value B0 of the magnetic field and an effective volume V of the bar affected by the magnetic field. With the dipole field decaying according to B0 h3 and V ¼ hd2 one would obtain Fx h5 . The decay with h7 is therefore not obvious. It can be FIG. 9. Decimal logarithm of the force magnitude distribution for nondimensional force Fx ðy; zÞ, k ¼ (0, 0, 1). The gap in the isoline closest to the bar is due to computational reasons. Downloaded 24 Apr 2012 to 141.24.81.72. Redistribution subject to AIP license or copyright; see http://jap.aip.org/about/rights_and_permissions 113921-8 Kirpo et al. J. Appl. Phys. 109, 113921 (2011) FIG. 12. Angle h in degrees between the z axis and direction of the eigenvector. F2x FIG. 10. Definition of the angle h between the z axis and direction of the dipole. variation in x when the parameter e tends to zero. The quantities of interest (i. e., B, /, j, F) are then represented as regular perturbation expansions in the small parameter e, e. g., for the magnetic field: xÞ þ eB1 ð^ x; y^; ^zÞ þ e2 B2 ð^ x; y^; ^zÞ þ …: (11) Bð^ x; y^; ^ zÞ ¼ B0 ð^ The superscripts denote the order of approximation for every term. The expressions for B0 are given in Appendix A. The velocity field is constant and therefore independent of e. We would like to limit ourselves by three leading terms of the Lorentz force Fx series expansion: ð 0 (12) Fx ¼ j0 B0 x dV; F1x ¼ ð j1 B0 þ j0 B1 x dV; ¼ ð j2 B0 þ j1 B1 þ j0 B2 x dV: (14) Then the evaluation of Fx requires computation of these six integrals. Each of them and details of the calculation are considered in the appendix. We only present the key steps of the procedure at this point. The Laplace equation for the leading term /0 of the electrical potential is easily solved by /0 ¼ zB0y yB0z þconst. Therefore j0 ¼ 0 and all integrals containing the current j0 vanish. The first-order term j1 of the current does not vanish. We can determine its components in the yz plane by a stream function representation. There is no contribution to the Lorentz force from such a planar current distribution interacting a field B0 that is constant on each yz plane, Ð with 1 i. e. ðj B0 Þx dV ¼ 0. However, there is a contribution from the interaction with B1 : ð 1 152 2:253 2 j B1 x dV ¼ ð5kx2 þ 7kz2 Þ: (15) e 220 ph7 (13) FIG. 11. The eigenvectors show dipole orientations which provide the highest Lorentz force for different (y, h) pairs. FIG. 13. Angle h in degrees between the z axis and direction of the eigenvector for two selected values of the distance h. Downloaded 24 Apr 2012 to 141.24.81.72. Redistribution subject to AIP license or copyright; see http://jap.aip.org/about/rights_and_permissions 113921-9 Kirpo et al. J. Appl. Phys. 109, 113921 (2011) TABLE III. Nondimensional force Fx for different dipole orientations when the dipole is located at selected points ðy; hÞ. Three last rows show the Lorentz force magnitudes computed for the dipoles which are oriented to get the highest force. Fx at (y, h) Dipole orientation ðkx ; ky ; kz Þ (0.56, 0.04) (0.8, 0.8) (0.4, 0.4) (1, 0, 0) (0, 1, 0) (0, 0, 1) pffiffiffiffiffiffiffi pffiffiffiffiffiffiffi ð 0:5; 0:5; 0Þ pffiffiffiffiffiffiffi pffiffiffiffiffiffiffi ð 0:5; 0; 0:5Þ pffiffiffiffiffiffiffi pffiffiffiffiffiffiffi ð0; 0:5; 0:5Þ (0.136, 0.725, 0.688) (0, 0.563, 0.826) (0, 0.400, 0.916) 0.678 0.671 0.633 0.678 0.659 1.007 1.010 2:10 104 1:38 104 2:39 104 1:74 104 2:24 104 3:18 104 0:88 102 0:38 102 1:17 102 0:63 102 1:03 102 1:20 102 3:28 104 1:36 102 FIG. 14. A comparison between numerically obtained values and large h asymptotic theory for two different dipole orientations. For the last remaining integral we use the continuity equation and the result for /0 to get ð 15 e2 j2 B0 x dV ¼ 16 7 ð35kx2 þ 8ky2 þ 57kz2 Þ: (16) 2 ph By combining all evaluated integrals we see that the leading term of the Lorentz force is given by Fx ¼ 15 2 2 2 45:561k þ 8k þ 71:785k x y z : 216 ph7 (17) We have thereby demonstrated that Fx h7 when h 1. The dependence of the force on the orientation differs from the limit h ! 0 as can be seen from the coefficients multiplying the components ki. In particular, the y orientation becomes even less effective than in the case h ! 0. The in-house finite differences code described in Sec. II is capable of calculating the total Lorentz force for large distances exceeding h > 103 , while the commercial code used in Sec. III can resolve the effects at small distances. In the region where both codes could be used (h between 2 and 80) the largest relative error between the results obtained with the two different codes was not greater than 2%. The asymptotic theory agrees with the values obtained by in-house solver for large h as it is shown in Fig. 14. The observed differences are less than 2% for all orientations of the dipole. V. CONCLUSIONS The electromagnetic drag force and torque acting on a magnetic dipole due to the motion of an electrically conducting bar with square cross section and infinite length have been computed for different orientations and locations of the dipole. The results show that the largest magnitude of the Lorentz force can be obtained for the magnetic dipole oriented in the vertical direction and located in the symmetry plane y ¼ 0 of the bar. The force dependence on the distance h between the dipole and the bar is governed by power laws when the distance h is either small or large relative to the width of the bar. For small distances, the power law is identical to the case of an infinite plate. At large distance, the power law for the bar shows a more rapid decay, which is proportional to h7 , than for the infinite plate. The asymptotic theory that explains the slope of the force decay for large h 1 was developed too. The force magnitude for really large distance h is very small and the obtained analytical result cannot find a practical application for flow rate measurements in liquid metal flows. From the other side, there is a substantial demand for LFV application for electrolyte flows. In these applications the electrical conductivity is several orders of magnitude smaller r 10 100 S/m and, therefore, measured Lorentz force is in a range of 105 N. The developed asymptotic theory can be used to build LFV prototypes for low-conducting liquids. In particular, to investigate them within the model environment where LFV device is located at some distance away from the experimental liquid-metal channel. The slope of the Lorentz force decay for h 1, which is proportional to h7 , is expected to be present in other similar problems involving laminar or turbulent flows in ducts or pipes. Derivation of the asymptotic theory for the translational motion of a solid cylindrical body of round cross section is straightforward and gives a different prefactor but almost the same dependencies on k. It also was found that the optimal orientation of the dipole that produces the maximum Lorentz force strongly depends on its position (y, h). The torque dependence on the distance h is also given by power laws. The torque found to be constant within the accuracy of numerical results for y ¼ 0, ky ¼ 0 and kx2 þ kz2 ¼ 1. The discussed results allow us to evaluate the Lorentz force magnitude and torque for specified h and m. If we take an aluminum bar with v ¼ 1 m/s, d ¼ 5 102 m, r ¼ 3:54 107 (X m)1 , h ¼ 102 m, and dipole moment m ¼ (0, 0, 1) Am2, then the corresponding nondimensional force value taken from Table I is Fx ¼ 0:28 and Fx ¼ rvl20 m2 d 3 Fx ¼ 0:125 N. The analogous computation for Ty with Ty ¼ 4:52 102 gives Ty ¼ 1:01 103 N m. Such values are easily measured with typical laboratory equipment. They show that the LFV approach is quite practical for the envisaged applications. Downloaded 24 Apr 2012 to 141.24.81.72. Redistribution subject to AIP license or copyright; see http://jap.aip.org/about/rights_and_permissions 113921-10 Kirpo et al. J. Appl. Phys. 109, 113921 (2011) Future numerical work will focus on cylindrical geometries and more realistic velocity distributions resembling actual pipe or duct flows. Investigations of the coupled problem where the flow is modified by the Lorentz force will be performed with the finite-difference method presented by Krasnov et al.21 Experimental verification of the obtained results will be performed for different dipole orientations and (y, h) pairs by members of our Research Training Group “Lorentz Force Velocimetry and Lorentz Force Eddy Current Testing’’ project. The solution for the potential is then given by /0 ¼ ^zB0y y^B0z þ const; which gives the currents j0 0. Hence, the integral (12) vanishes and F0x 0. Also, all the integrands involving j0 in Eqs. (13) and (14) are zero. The currents in the bar have to fulfill the continuity equation $ j ¼ 0. Because of Eq. (A2) we have @j0x @j1y @j1z þ þ ¼ 0: @^ x @^ y @^z ACKNOWLEDGMENTS The authors gratefully acknowledge financial support from the Deutsche Forschungsgemeinschaft in the framework of the Research Training Group “Lorentz Force Velocimetry and Lorentz Force Eddy Current Testing” (grant GRK 1567/1). Computer resources were provided by the computing center of Ilmenau University of Technology. APPENDIX A: DETAILS OF THE ASYMPTOTIC ANALYSIS We assume that the dipole is placed in the symmetry plane y ¼ 0 but allow arbitrary dipole orientation. In this situation, the leading order terms of the nondimensional magnetic field components are 1 kx ð2^ x2 1Þ þ 3kz x^ xÞ ¼ ; B0x ð^ 4ph3 ð^ x2 þ 1Þ5=2 xÞ ¼ B0y ð^ ky 1 ; 4ph3 ð^ x2 þ 1Þ3=2 2 B0z ð^ xÞ ¼ 1 3kx x^ þ kz ð2 x^ Þ : 4ph3 ð^ x2 þ 1Þ5=2 (A1) They depend only on x^. The y component of the magnetic field vanishes to leading order for dipoles with orientations k ¼ (0, 0, 1) and k ¼ (1, 0, 0), while B0z vanishes for k ¼ (0, 1, 0). To obtain the currents j0 , j1 and j2 one has to solve the Laplace Eq. (3) for the electrical potential up to the required order of approximation. We find the corresponding equations and boundary conditions for the electric potential at the different orders by substitution of the expansions and grouping terms of different orders. For the expansion of derivatives we note that the Nabla operator takes the form @ @ @ : (A2) r¼ e ; ; @^ x @^ y @^z There is no normal current at insulating walls and @/0 ¼ B0z ; @^ y y^¼60:5 @/0 ¼ B0y : @^z ^z¼60:5 (A3) ðr j1 Þx ¼ @j1z @j1y @2w @2w ¼ 2 2: @^ y @^z @^ y @^z Ohm’s law (2) gives @ @/1 @ @/1 þ B1y B1z ðr j1 Þx ¼ @^z @^ y @^ y @^z 0 @B ¼ x: @^ x (A7) (A8) The above result is obtained remembering that the magnetic field of the dipole is solenoidal and therefore @B0x @B1y @B1z þ þ ¼ 0: @^ x @^ y @^z (A9) Hence, we have to solve the following Poisson equation for the stream function @ 2 w @ 2 w @B0x ; þ 2 ¼ @^ x @^ y2 @^z (A10) where wjwall ¼ 0. Equation (A10) also governs the laminar flow profile in a rectangular duct.26 It can be solved using an infinite series expansion, whereby one finds: ð 0:5 ð 0:5 wd^ yd^z ¼ 0:5 0:5 2:253 @B0x : x 64 @^ (A11) This identity is used to calculate the x component of the first term from integral (13) which also vanishes: ð (A4) (A6) This equation can be automatically satisfied for j0x ¼ 0 if a stream function w ¼ wð^ x; y^; ^zÞ is introduced, i. e., y. We choose w to vanish at the j1y ¼ @w=@^z and j1z ¼ @w=@^ walls and automatically satisfy boundary conditions for currents j n ¼ 0 because the boundary is a streamline of electric current. To obtain an equation for the stream function w we consider the x component of the current curl, For the zero-order approximation the appropriate Laplace equation becomes @ 2 /0 @ 2 /0 þ ¼ 0: @^ y2 @^z2 (A5) ðj1 B0 Þx dV ¼ 2:253 64 ð1 1 B0x @B0x hd^ x 0: @^ x (A12) The second-order terms Eq. (14) should be evaluated Ð 2 to obtain a nonvanishing F . There are two such terms: ðj B0 Þx dV x Ð 1 1 and ðj B Þx dV. The latter integral can be solved using the stream function w by taking into account that Downloaded 24 Apr 2012 to 141.24.81.72. Redistribution subject to AIP license or copyright; see http://jap.aip.org/about/rights_and_permissions 113921-11 Kirpo et al. ðj1 B1 Þx ¼ J. Appl. Phys. 109, 113921 (2011) @ @ @B0 ðwB1y Þ þ ðwB1z Þ þ w x : @^ x @^ y @^z (A13) By using Stokes’ theorem we see that the first two terms do not contribute: which can be computed analytically by integration by parts and variable substitution. We thereby obtain the expression ð 15 ðj2 B0 Þx dV ¼ 16 5 35kx2 þ 8ky2 þ 57kz2 : (A20) 2 ph 1 ð 0:5 ð 0:5 0:5 0:5 @ @ ðwB1y Þ þ ðwB1z Þ d^ yd^z @^ y @^z 0 1 þ ¼ @ w B1y d^z w B1z d^ yA ¼ 0: |{z} |{z} ¼0 (A14) ¼0 Then the integral can be transformed as ð ðj1 B1 Þx dV ¼ ððð wð^ x; y^; ^zÞd^ yd^z @B0x hd^ x: @^ x (A15) Using Eq. (A11), it integrates to ð ðj1 B1 Þx dV ¼ 152 2:253 2 5kx þ 7kz2 : 20 5 2 ph (A16) Ð The integral ðj2 B0 Þx dV contains j2 . To compute the current at second order we again use the continuity equation in the following form @j2y @j2z @j1 @ 2 /0 þ ¼ x¼ : @^ y @^z @^ x @^ x2 (A17) We can use this equation to obtain @B0y @B0 y^ z ; @^ x @^ x 2 0 1 1 @ Bz j2y ¼ y^2 ; x2 2 4 @^ 1 2 1 @ 2 B0y j2z ¼ ^z ; x2 2 4 @^ j1x ¼ ^z (A18) which satisfy the boundary conditions for the current. The x component of the first term of F2x in Eq. (14) is then given by ð 2 0 ðj B Þx dV ¼ ð j2y B0z j2z B0y dV; (A19) A. Thess, E. Votyakov, and Y. Kolesnikov, Phys. Rev. Lett. 96, 164501 (2006). 2 Y. Kolesnikov, C. Karcher, and A. Thess, “Lorentz force flowmeter for liquid aluminum: Laboratory experiments and plant tests,” Metall. Mater. Trans. B. 42B, 441-450 (2011). 3 S. Argyropoulos, Scan-d. J. Metall. 30, 273 (2000). 4 R. Ricou and C. Vives, Int. J. Heat Mass Transfer 25, 1579 (1982). 5 J. Szekely, C. Chang, and R. Ryan, Metall. Trans. B 8, 333 (1977). 6 Y. Takeda, Nucl. Technol. 79, 120 (1987). 7 S. Eckert, G. Gerbeth, and V. Melnikov, Exp. Fluids 35, 381 (2003). 8 J. Shercliff, ed., The Theory of Electromagnetic Flow Measurement (Cambridge University Press, Cambridge, UK, 1962). 9 M. Bevir, J. Fluid Mech. 43, 577 (1970). 10 F. Stefani, T. Gundrum, and G. Gerbeth, Phys. Rev. E70, 056306 (2004). 11 J. Reitz, J. Appl. Phys. 41, 2067 (1970). 12 B. Palmer, Eur. J. Phys. 25, 655 (2004). 13 A. Thess, E. Votyakov, B. Knaepen, and O. Zikanov, New J. Phys. 9, 299 (2007). 14 J. Priede, D. Buchenau, and G. Gerbeth, Magnetohydrodynamics 45, 451 (2009). 15 J. Priede, D. Buchenau, and G. Gerbeth, “Single-magnet rotary fowmeter for liquid metals,” J. Appl. Phys. (submitted). 16 J. Jackson, Classical Electrodynamics, 3rd ed. (Wiley, New York, 1998). 17 P. Roberts, ed., An Introduction to Magnetohydrodynamics (American Elsevier, New York, 1967). 18 When the dipole is far away from the bar the relevant diffusion time could be based on the width of the bar d assuming that the dominant magnetic field balance results from the cross stream diffusion. This situation would be analogous to thin film flows. It would provide a different and weaker constraint for the quasistatic approximation. 19 N. Petra and M. K. Gobbert, in Parallel Performance Studies for COMSOL Multiphysics Using Scripting and Batch Processing, edited by Yeswanth Rao (Proceedings of the COMSOL Conference, Boston, MA, 2009), pp. 1-6. 20 COMSOL Multiphysics Reference Guide, ver. 3.5a (Comsol AB, 2008). 21 D. Krasnov, O. Zikanov, and T. Boeck, “Comparative study of finite difference formulations to simulation of magnetohydrodynamic turbulence at low magnetic Reynolds number,” Comput. Fluids (submitted). 22 Y. Morinishi, T. Lund, O. Vasilyev, and P. Moin, J. Comput. Phys. 143, 90 (1998). 23 M.-J. Ni, R. Munipalli, N. Morley, P. Huang, and M. Abdou, J. Comput. Phys. 227, 174 (2007). 24 As pointed out by the anonymous referee it is actually preferable to work with the induction equation in the quasi-static limit in order to estimate the magnitude of the induced currents. In this formulation, the source term for the induced field is the x derivative of the applied magnetic field. We have computed the modulus of this quantity for different dipole orientations, and find that it accounts for the different magnitudes of the Lorentz force in a straightforward manner. We shall not discuss this issue further since we have performed our study with the electrical potential formulation. 25 G. Strang, ed., Linear Algebra and Its Applications (Thomson Brooks/ Cole, Belmont, 2006). 26 C. Pozrikidis, ed., Introduction to Theoretical and Computational Fluid Dynamics (Oxford University Press, New York, 1997) Downloaded 24 Apr 2012 to 141.24.81.72. Redistribution subject to AIP license or copyright; see http://jap.aip.org/about/rights_and_permissions