Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Nordström's theory of gravitation wikipedia , lookup
Aharonov–Bohm effect wikipedia , lookup
Introduction to gauge theory wikipedia , lookup
Photon polarization wikipedia , lookup
Time in physics wikipedia , lookup
Coherence (physics) wikipedia , lookup
Gravitational wave wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
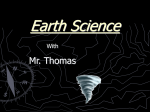
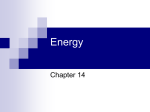
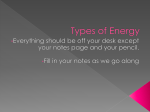
Geophysical Journal International Geophys. J. Int. (2013) 192, 1288–1307 doi: 10.1093/gji/ggs096 Early electromagnetic waves from earthquake rupturing: I. theoretical formulations Yongxin Gao,1,2 Xiaofei Chen,1,2 Hengshan Hu3 and Jie Zhang1,2 1 School of Earth and Space Sciences, University of Science and Technology of China, Hefei, 230026, China. E-mail: [email protected] of Seismology and Physics of Earth’s Interior, University of Science and Technology of China, Hefei, 230026, China. 3 Department of Astronautics and Mechanics, Harbin Institute of Technology, Harbin, 150001, China 2 Laboratory Accepted 2012 November 30. Received 2012 November 26; in original form 2012 July 3 GJI Seismology SUMMARY Earthquake taking place in a fluid-saturated porous medium can generate electromagnetic (EM) waves because of the electrokinetic effect. These generated EM waves arrive at a distant observatory much earlier than the seismic waves because their velocities are much faster than those of the seismic waves. They may explain the early EM signals which have been detected before the detection of the seismic waves after the occurrences of earthquakes. In this study, we attempt to analyse such a kind of early EM signals induced by an earthquake because of the electrokinetic effect. The earthquake is assumed to be a fault slip and is modelled by a moment tensor point source. With Pride’s equations quantifying the coupling between seismic and EM waves, we first present a real-axis integration (RAI) algorithm to calculate the seismoelectric wavefields in a layered porous formation. Although full waveforms can be calculated by such a RAI technique, individual waves cannot be easily separated from the full waveforms. The need to compute the individual waves is eminent for the purpose of investigating the early EM waves, because these EM waves are usually several orders weaker than and are masked by the EM signals accompanying the seismic waves in the full waveforms. Therefore, we further develop a branch-cut integration (BCI) algorithm, by transforming the original wavenumber integral along the real axis in the complex wavenumber plane for the RAI technique to a sum of integrals along the vertical branch cuts and the residues of the poles. For performing the integrations along the vertical branch cuts, determination of the Riemann sheets are explained and displayed. Finally, the seismoelectric wavefields are represented in forms allowing calculating individual waves. Key words: Magnetic and electrical properties; Computational seismology; Wave propagation; Early warning. 1 I N T RO D U C T I O N Electromagnetic (EM) signals were observed after earthquake took place. Some of them were detected before the detection of the seismic waves (Honkura et al. 2002; Okubo et al. 2011), and thus they are the early EM signals that may be associated with the earthquake sources. Others were measured at the time when the seismic waves arrived (Nagao et al. 2000; Matsushima et al. 2002; Karakelian et al. 2002; Tang et al. 2008), and they are the local EM signals accompanying the seismic waves. So far, it is still unclear how both the two kinds of EM disturbances are generated by earthquakes, although some possible mechanisms were proposed for the coupling between the mechanical and EM energies and for explaining the earthquake-induced EM signals, for example the electrokinetic effect (Bernard 1992; Haartsen & Pride 1997; Jouniaux & Ishido 2012), the piezomagnetic effect (Okubo et al. 2011), the motional induction effect (Matsushima et al. 2002; Yamazaki 2012) and the piezoelectric effect (Huang 2002). In this study, we focus on the electrokinetic effect which takes place in a fluid-saturated porous medium such as rocks in the shallow crust. In a fluid-saturated porous medium, the grains in contact with an electrolyte acquire a chemically surface bound charge that is balanced by counter ions in the thin pore fluid layer surrounding the grains. The counter ions are mobile and in diffuse distributions. The ensemble of the bound and diffuse-charge layers is known as the electric double layer, owing to which mechanical and EM energies are coupled. When the porous medium is perturbed, relative fluid-grain motion takes place transporting the mobile ions in the diffuse layer to generate streaming potentials and streaming currents (Pozzi & Jouniaux 1994; Haartsen & Pride 1997), which act as the sources for the EM signals. 1288 C The Authors 2013. Published by Oxford University Press on behalf of The Royal Astronomical Society. Early EM waves 1289 Two kinds of seismoelectric conversions because of the electrokinetic effect were observed in field and laboratory experiments (e.g. Thompson & Gist 1993; Butler et al. 1996; Mikhailov et al. 1997; Garambois & Dietrich 2001; Zhu et al. 2000, 2008; Bordes et al. 2006, 2008; Schakel et al. 2011) and they were interpreted by theoretical simulations (Haartsen & Pride 1997; Garambois & Dietrich 2002; Hu & Liu 2002; Revil & Jardani 2010; Ren et al. 2010; Zyserman et al. 2010) on the basis of Pride’s equations (Pride 1994) in an electrokinetic nature. The first kind of seismoelectric conversion produces a local accompanying EM field restricted to the disturbance region of the seismic wave. It seems to be a reasonable explanation for the observed EM fields synchronized with the seismic waves (Nagao et al. 2000; Karakelian et al. 2002; Tang et al. 2008). Some theoretical simulations of the earthquake-induced EM fields on the basis of the electrokinetic effect can interpret observations well. For example, Hu & Gao (2011) theoretically investigated the electric and magnetic disturbances generated by an earthquake with a finite fault for source. They observed two types of variations in the electric field, that is the coseismic oscillatory and post-seismic decaying changes, which agree well with the observations made by Nagao et al. (2000). The second kind of seismoelectric conversion produces an independently propagating EM wave converted from a seismic wave at an interface with a contrast in mechanical and/or electrical properties (Haartsen & Pride 1997; Garambois & Dietrich 2002). Such a kind of EM wave can also be generated by a mechanical source (Pride & Haartsen 1996) like an earthquake with a double-couple source (Gao & Hu 2010). It propagates at a speed several orders faster than the seismic wave, thus may be a possible explanation of the early EM signals which were detected before the arrivals of the seismic waves (e.g. Honkura et al. 2002; Okubo et al. 2011). This kind of early EM signals are important because they may be used for making earthquake early warning because they arrive at a distant receiver much earlier than the seismic waves, especially the destructive transverse and surface waves. Unfortunately, such EM signals are seldom detected and reported in real cases (Honkura et al. 2002; Okubo et al. 2011), and their characteristics and mechanism are still theoretically unclear. Because the electrokinetic effect is supposed to be a possible mechanism giving rise to the earthquake-induced EM disturbances, the early EM signals resulting from such a mechanism deserve further investigation. To quantitatively model the electrokinetic effect, Pride (1994) derived a set of macroscopic equations that controls the coupled seismic and EM fields in a fluid-saturated porous medium. On the basis of Pride’s equations, Gao & Hu (2010) derived the analytical expression of seismoelectric wavefield radiated by a moment tensor source in an unbounded space. In their work, early EM wave radiated from the source is observed, which arrives much earlier than the seismic P and S waves. Obviously, a full-space solution is not enough for real earthquake case because there are always boundaries, especially the free surface. A multilayered half-space geological model was often used for simplicity, and for this geological model many algorithms have been developed to synthesize theoretical seismograms (e.g. Fuchs & Müller 1971; Chen 1999; Kawai et al. 2006). For the seismoelectric coupling case, there are some algorithms which were developed to calculate the seismoelectric wavefields generated by a point source (Haartsen & Pride 1997; Garambois & Dietrich 2002; Ren et al. 2010) and by a finite fault (Hu & Gao 2011; Ren et al. 2012) in horizontally layered media. One can use these algorithms to solve the seismoelectric wavefields in the frequency-wavenumber domain with the boundary conditions and the source representations, and then obtain the time-space responses of the wavefields by integrating the wavenumber and performing a discrete Fourier transform on the frequency. The integration of the wavenumber is often implemented along the real axis on the complex wavenumber plane by the discrete wavenumber method (Bouchon & Aki 1977), and it is recognized as real-axis integration (RAI). There are also numerical approaches allowing for calculating seismoelectric wavefields in irregular geological models, like the finite difference method (Guan & Hu 2008) and the finite element method (Zyserman et al. 2010). All the approaches mentioned above calculate the entire seismoelectric wavefields and only full waveforms can be obtained. However, a full-waveform solution is not sufficient if we want to investigate the early EM waves from the earthquake rupturing. As will be shown in fig.1 of Gao et al. (2012), that is the companion paper of this study, the amplitudes of the early EM waves are several orders of magnitude smaller than the EM signals accompanying the seismic waves, so that they are often masked in the full waveforms of electric and magnetic fields. Therefore, to precisely analyse such early EM waves, a new algorithm allowing for calculating individual waves is required. One effective way for extracting the individual wave from the full waveform is to apply the branch-cut integration (BCI) method. The main idea of the BCI method is transforming the integral along the real axis in the complex wavenumber plane to a sum of the integrals along the branch cuts and the residues of the poles by Cauchy’s residue theorem. The full wavefield is then represented as a sum of the branch-cut integrals and the residues of the poles, so that contributions from individual waves can be separated. Such a BCI method has been successfully used to calculate the individual waves from the full waveforms of the borehole acoustic wavefields (Peterson 1974; Tsang & Rader 1979; Kurkjian 1985; Liu & Chang 1996; He & Hu 2009; Zhang et al. 2009) and to calculate the seismic head waves (Aki & Richards 2002; Bayanheshig et al. 2002). In this study, we shall extend the BCI method to calculate the early EM waves generated by an earthquake because of the electrokinetic effect in a porous half-space. Pride’s equations (Pride 1994) are utilized to model the coupling between the seismic and EM waves. Although it has certain limitations (details in Hu & Gao 2011), the set of Pride’s equations is presently still among the most effective governing equations for seismoelectric coupling. If one uses the coupling coefficients obtained from experiment for calculation, Pride’s equations should be valid. The structure of the present paper is as follows. In the following section, formulations to calculate seismoelectric wavefield generated by a moment tensor point source in layered media are briefly introduced and the RAI representation of the seismoelectric wavefield is expressed. In Section 3, the seismoelectric wavefield is transformed to a BCI representation, and the BCI path as well as the determination of the Riemann sheets is shown. Conclusions and discussions are given in Section 4. The validation of the BCI algorithm and the numerical experiments shall be performed in the companion paper (Gao et al. 2012). 1290 Y. Gao et al. 2 R A I R E P R E S E N TAT I O N O F T H E S E I S M O E L E C T R I C WAV E F I E L D Pride (1994) presented a set of macroscopic governing equations controlling the coupled seismic and EM fields in a fluid-saturated porous medium. On the basis of Pride’s equations Haartsen & Pride (1997) derived an algorithm to compute the seismoelectric wavefields generated by a point source in a layered media. Their algorithm was developed to allow for a moment tensor source to simulate an earthquake (Hu & Gao 2011). Before presenting our new development, in this section we give a brief introduction to the formulations presented by Haartsen & Pride (1997) and Hu & Gao (2011). In their studies a cylindrical coordinate system (r, θ, z) is adopted and the surface vector harmonics Rmk , Smk and Tmk are introduced, where Rkm (r, θ) = Jm (kr )eimθ ez , m Jm (kr )eimθ eθ , kr m Jm (kr )eimθ er . Tmk (r, θ ) = i Jm (kr )eimθ eθ + kr Smk (r, θ) = −i Jm (kr )eimθ er + (1) (2) (3) In the frequency domain, a field variable ξ can be represented in terms of these surface vector harmonics as a Fourier-Hankel transform, ξ (r, θ, z, ω) = ξr (r, θ, z, ω)er + ξθ (r, θ, z, ω)eθ + ξz (r, θ, z, ω)ez = +∞ dk 0 n ξ̂1 (k, m, z, ω)Smk + ξ̂2 (k, m, z, ω)Tmk + ξ̂z (k, m, z, ω)Rkm , (4) m=−n where, Jm (kr ) is the m-order Bessel function of the first kind, Jm (kr ) = k1 dJmdr(kr ) , k is the horizontal wavenumber, er , eθ and ez are the coordinate unit vectors. The field vector ξ can be the solid displacement u, the relative fluid-solid displacement w, the electric field E, the magnetic field H, etc. The order n of the summation is determined by the azimuthal symmetry of the point source. n = 0 if the source is azimuthally uniform like an explosion source or a vertical point force. n = 1 if the source is a point force with a non-zero horizontal component. n ≤ 2 if the source is a moment tensor. ξ̂ is the field vector in the new coordinates composed of Smk , Tmk and Rkm . Applying the transformation in eq. (4), we then split Pride’s equations into two independent systems. One is the PSVTM set coupling the propagation of the fast compressional waves (P f ), slow compressional waves (Ps), shear waves with polarizations in the vertical plane of propagation (SV ) and EM waves with transverse polarizations of the magnetic fields (T M). The other is the SHTE set coupling the propagation of the horizontally polarized shear waves (S H ) and EM waves with transverse polarizations of the electric fields (T E). In each set, the governing equation takes the following form ∂ B(k, m, z, ω) = A(k, ω)B(k, m, z, ω) + F̄(k, z, ω), ∂z (5) where B denotes the displacement-stress-EM vector, and F̄ denotes the source vector. A is a matrix depending on the frequency ω, the wavenumber k and the parameters of the porous medium. The detailed expressions of A and F̄ are given by Haartsen & Pride (1997). The vectors B in the two systems are written as BV = [û 1 , û z , ŵz , τ̂1z , τ̂zz , −P, Ĥ2 , Ê 1 ]T , (6) B H = [û 2 , τ̂2z , Ĥ1 , Ê 2 ]T , (7) where, τ is the bulk stress tensor and P is the pore fluid pressure. The superscripts ‘V’ and ‘H’ correspond to the PSVTM and SHTE systems, respectively. The superscript ‘T’ denotes the transpose. The wavefields in both the PSVTM and SHTE systems can then be solved separately in terms of plane wave theory with the following boundary conditions and source representations, respectively. The boundary condition at the interface of depth z which separates two different porous layers requires the continuity of the vector B across the interface, that is B(z − ) = B(z + ). (8) The boundary condition at the free surface requires that the tractions are free and the horizontal components of the electric field E and the magnetic field H are continuous. The free surface condition for the PSVTM system is ⎡ ⎤ ⎡ ⎤ 0 ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ τ̂zz ⎥ ⎢0⎥ ⎢ ⎥ = ⎢ ⎥, ⎢ ⎥ ⎢ ⎥ ⎢ − P̂ ⎥ ⎣0⎦ ⎢ ⎦ ⎣ q0 Ĥ2 + ε0 Ê 1 0 τ̂1 (9) Early EM waves whereas that for the SHTE system is ⎤ ⎡ ⎤ ⎡ τ̂2 0 ⎦ = ⎣ ⎦, ⎣ 0 μ0 Ĥ1 − q0 Ê 2 where q0 = 1291 (10) s02 − p2 is the vertical slowness of the EM0 wave in the air (which is taken as a vacuum). s0 = √ ε0 μ0 is the slowness of the EM0 wave, where ε0 and μ0 are the permittivity and permeability of the vacuum. Ê 1 , Ê 2 , Ĥ1 and Ĥ2 correspond to the values at the top of the porous layer right below the free surface. As an underground earthquake source is considered, there is only an upgoing EM wave in the air. Therefore, the condition for the continuity of E and H can be written as in eqs (9) and (10). The contribution of the source is represented by a discontinuity of the vector B on the horizontal plane at depth z s , where the source is located, B(z s+ ) − B(z s− ) ≡ S(k, m, ω). (11) S(k, m, ω) is the so-called displacement-stress-EM discontinuity vector for the point source (Haartsen & Pride 1997). Using all the boundary conditions and the source representation, one can solve the wavefields in the frequency-wavenumber domain. With a Fourier transform back to the time-space domain, one obtains +∞ +∞ n ξz (r, θ, z, t) = e−iωt dω kdk Jm (kr )ξ̂z (k, m, z, ω)eimθ , (12) −∞ ξr (r, θ, z, t) = 0 m=−n +∞ +∞ e−iωt dω 0 kdk n m × J (kr )ξ̂2 (k, m, z, ω) − i Jm (kr )ξ̂1 (k, m, z, ω) eimθ , kr m −∞ (13) m=−n ξθ (r, θ, z, t) = +∞ −∞ × e−iωt dω n m=−n +∞ 0 kdk m [ kr Jm (kr )ξ̂1 (k, m, z, ω) + i Jm (kr )ξ̂2 (k, m, z, ω)]eimθ . (14) To model an earthquake, Hu & Gao (2011) derived the discontinuity vector S(k, m, ω) for a moment tensor source with Mi j denoting its i jth component. For each component, the expression of S(k, m, ω) and the value of m, that is the order of the summation in eqs (12)–(14), are different. For m = 0, only the components Mx x , M yy , Mzz , Mx y and M yx contribute to S(k, m, ω) in the forms T M 2G M s(ω) C ik (15) 0, Mzz , − Mzz , Mx x + M yy − ik 1 − Mzz , 0, 0, 0, 0 , SV (k, 0, ω) = 2π 2 S H (k, 0, ω) = T ik s (ω) 0, Mx y − M yx , 0, 0 , 2π 2 (16) where = H M − C 2 , and s(ω) is the Fourier transform of the source time function. H , C, M and G are elastic moduli. One can refer to Haartsen & Pride (1997) for their detailed expressions. For m = ±1, only the components Mx z , M yz , Mzx and Mzy contribute to S(k, m, ω) in the forms T s (ω) 1 k ik (17) ±i Mx z + M yz , 0, 0, 0, (∓Mzx ± Mx z ) + Mzy − M yz , 0, 0, 0 , SV (k, ±1, ω) = 2π 2G 2 2 S H (k, ±1, ω) = s (ω) 2π T Mx z ∓ i M yz , 0, 0, 0 . 2G For m = ±2, only the components Mx x , M yy , Mx y and M yx contribute to S(k, m, ω) in the forms T k s (ω) ik V Mx x − M yy ∓ Mx y + M yx , 0, 0, 0, 0 , S (k, ±2, ω) = 0, 0, 0, − 2π 4 4 S H (k, ±2, ω) = T ik k s (ω) 0, ∓ Mx x − M yy + Mx y + M yx , 0, 0 . 2π 4 4 (18) (19) (20) 1292 Y. Gao et al. Once a moment tensor source is determined, field variables in frequency domain in eqs (12), (13) and (14) can then be expanded as +∞ ξz (r, θ, z, ω) = kdk{ J0 (kr )ξ̂z (k, 0) 0 + J1 (kr )ξ̂z (k, 1)eiθ − J1 (kr )ξ̂z (k, −1)e−iθ (21) + J2 (kr )ξ̂z (k, 2)e2iθ + J2 (kr )ξ̂z (k, −2)e−2iθ }, +∞ ξr (r, θ, z, ω) = 0 0 kdk i J1 (kr )ξ̂1 (k, 0) ξ̂2 (k, 1) − i ξ̂1 (k, 1) + i J2 (kr )ξ̂1 (k, 1) eiθ + J1 (kr ) kr ξ̂2 (k, −1) − i ξ̂1 (k, −1) + i J0 (kr )ξ̂1 (k, −1) e−iθ + J1 (kr ) kr ξ̂2 (k, 2) − i ξ̂1 (k, 2) + i J3 (kr )ξ̂1 (k, 2) e2iθ + 2J2 (kr ) kr ξ̂2 (k, −2) − i ξ̂1 (k, −2) −2iθ − i J1 (kr )ξ̂1 (k, −2) e + −2J2 (kr ) , kr +∞ ξθ (r, θ, z, ω) = (22) kdk − i J1 (kr )ξ̂2 (k, 0) ξ̂1 (k, 1) + i ξ̂2 (k, 1) − i J2 (kr )ξ̂2 (k, 1) eiθ + J1 (kr ) kr ξ̂1 (k, −1) + i ξ̂2 (k, −1) + J1 (kr ) − i J0 (kr )ξ̂2 (k, −1) e−iθ kr ξ̂1 (k, 2) + i ξ̂2 (k, 2) − i J3 (kr )ξ̂2 (k, 2) e2iθ + 2J2 (kr ) kr ξ̂1 (k, −2) + i ξ̂2 (k, −2) −2iθ + −2J2 (kr ) . + i J1 (kr )ξ̂2 (k, −2) e kr (23) In eqs (21)–(23) ξ̂1 (k, m), ξ̂2 (k, m) and ξ̂z (k, m) are short for ξ̂1 (k, m, z, ω), ξ̂2 (k, m, z, ω) and ξ̂z (k, m, z, ω), respectively. The integrals on the right sides of eqs (21)–(23) are mostly performed along the real axis of the horizontal wavenumber k plane, and they are the RAIs. As these integrals compute the entire wavefield as a whole, only full waveforms of the seismic or EM wavefields can be obtained whereas individual waves cannot be separated from the full waveforms. As will be shown in fig.1 of Gao et al. (2012), the early EM waves cannot be calculated by the RAI method. Therefore, in the following section, we will transform the real-axis integrals in eqs (21)–(23) into branch-cut integrals that allow extracting individual waves from the full waveforms. 3 B C I R E P R E S E N TAT I O N O F T H E S E I S M O E L E C T R I C WAV E F I E L D 3.1 Partition of the complex k-plane and determination of the Riemann sheets As displayed in Fig. 1, a porous half-space geological model is considered. The porous medium is homogeneous and isotropic. A Cartesian coordinate system is set up on the Earth surface with x, y and z indicating the north, east and downward directions, respectively. The earthquake source is represented by a moment tensor and buried at depth z s . The receiver is located several metres under the free surface. The corresponding field variables ξ̂1 (k, m), ξ̂2 (k, m) and ξ̂z (k, m) in the frequency-wavenumber domain in the PSVTM and SHTE systems are solved by a process described in Appendix A. Then, by performing the integrations of k in eqs (21)–(23), one can obtain the frequency-space responses of the field variable ξ in the time-space domain. In the half-space model we used, five body waves are involved. One is the EM wave travelling in the air and is denoted by EM0 . The other four are the P f , Ps, S and EM waves that propagate in the porous medium. We define kl with l = {0, em, p f , sv, ps} as the wavenumbers of these five body waves kl = ωsl , (24) Early EM waves 1293 Figure 1. Geological model of this study. The Cartesian coordinates system is set up on the Earth surface with x, y and z indicating the north, east and downward directions, respectively. Figure 2. Partition of the complex k-plane and choices of the Riemann sheets for the case, Cem < C p f < Cs < C ps . The hyperbolic lines which depart from the branch points (solid points) are the Sommerfeld branch cuts, on which we have Im(klz ) = 0 with l = {0, em, p f , sv, ps}. OA is the RAI path. A BCI path including a semi-circle of infinite radius and five pairs of vertical branch cuts around the branch points is constructed. When the BCI path goes across the Sommerfeld branch cuts the integrand shifts from one Riemann sheet to another. The k-plane is divided into 16 Riemann sheets, each of which is numbered and denoted by five plus/minus signs inside a parenthesis. where sl is the slowness. The subscript ‘0’ corresponds to the EM0 wave propagating in the air. The expressions of s p f , s ps , ss and sem are listed in Appendix B. In the process of solving ξ̂1 (k, m), ξ̂2 (k, m) and ξ̂z (k, m) in Appendix A the vertical slowness ql is involved, (25) ql = ± sl2 − p2 , where p = k/ω is the horizontal slowness. Let klz = ωql be the vertical wavenumber, we then obtain klz = ± kl2 − k 2 . (26) klz The signs ‘±’ appearing in eqs (25) and (26) are because of the fact that is a double-valued function of the horizontal wavenumber k, indicating that kl is a branch point of klz . Therefore, ξ̂1 (k, m), ξ̂2 (k, m) and ξ̂z (k, m) are multivalued functions of k. Note that integrals in eqs (21)–(23) cannot be performed unless the integrands are single-valued. For this reason choice should be made between the alternative values z ) ≥ 0, of the vertical wavenumbers klz . For the RAI, we choose the values of klz with positive imaginary parts, that is Im(k0z ) ≥ 0, Im(kem z z z Im(k p f ) ≥ 0, Im(ks ) ≥ 0 and Im(k ps ) ≥ 0, because the integration path is always on the principal Riemann sheet (Aki & Richards 2002). However, for the BCI, the situation is complicated. In what follows, we will discuss the choices of the values of klz and also the determination of the Riemann sheets. A complex horizontal wavenumber k-plane is displayed in Fig. 2, where k0 , kem , k p f , ks and k ps denote the locations of the branch points. The hyperbolic lines which depart from these branch points are the so-called Sommerfeld branch cuts (Chew 1990). On these cuts, we have Im(klz ) = 0, (27) which implies Re(k)Im(k) = Re(kl )Im(kl ) = Cl . (28) 1294 Y. Gao et al. √ Here, Cl is a constant if the frequency and the parameters of the medium are given. Note that the EM0 wave has a real slowness s0 = μ0 ε0 , which make the wavenumber k0 real and cause C0 = 0. Therefore the Sommerfeld branch cut corresponding to the k0 branch point reduces to the imaginary axis and part of the real axis. For the porous medium, the P f wave is always faster than the S wave so that Re(k p f ) < Re(ks ). The Ps wave is a very slow and highly attenuated wave and it can be regarded as a fluid diffusion process at earthquake wave frequencies (less than several hertz; Chandler & Johnson 1981). Therefore, it is always valid that Re(k p f ) < Re(ks ) < Re(k ps ). In general, Im(k p f ) and Im(ks ) are nearly equal to each other and they are much smaller than Im(k ps ) so that we have C p f < Cs < C ps . The EM wave travelling in the porous medium is usually faster than the P f wave indicating that Re(kem ) < Re(k p f ). It should be noted that the porous medium is conductive and the EM wave propagating in it is dispersive and attenuated. In very low frequencies, the propagation of the EM wave degenerates to a diffusion process (Løseth et al. 2006), and the phase velocity of the EM wave may be smaller than the P f or even S waves, making Re(kem ) > Re(k p f ) or even Re(kem ) > Re(ks ). However, in that case the EM wave will arrive later than the seismic wave and it will not be helpful for earthquake early warning. Thus, we ignore that case and only consider the situation where Re(kem ) > Re(k p f ). We should also note that the attenuation of the EM wave indicated by Im(kem ) increases with the conductivity of the porous medium. Therefore, there is a relation among the four body waves in the form Cem < C p f < Cs < C ps or C p f < Cem < Cs < C ps or C p f < Cs < Cem < C ps . We ignore the case C p f < Cs < C ps < Cem because in that situation the EM wave should be highly attenuated and it may not be detectable. Hence, in the following sections we will discuss three possible cases, respectively. For the case Cem < C p f < Cs < C ps , the distributions of the Sommerfeld branch cuts are shown in Fig. 2. The path OA is for the RAI. It is always located in the so-called principal or physical Riemann sheet (Aki & Richards 2002), in which the values of klz are chosen with non-negative imaginary parts, that is Im(klz ) ≥ 0, according to the radiation condition. The radiation condition requires that neither the EM0 wave in the air with a factor exp(−ik0z z) where z < 0 nor the seismic/EM waves in the porous half-space with factors exp(iklz z) where z > 0 1 :(+,+,+,+,+), which implies increase in amplitude when they travel to the infinity. The principal Riemann sheet is denoted in Fig. 2 by z ) ≥ 0, Im(k zp f ) ≥ 0, Im(ksz ) ≥ 0 and Im(k zps ) ≥ 0. In the following pages, we will use similar denotations to represent Im(k0z ) ≥ 0, Im(kem z ) ≥ 0, Im(k zp f ) ≥ 0, Im(ksz ) ≥ 0 the other Riemann sheets. For example, (−,+,+,+,+) denotes the Riemann sheet with Im(k0z ) < 0, Im(kem z and Im(k ps ) ≥ 0. The plus or minus symbols inside the parenthesis (−,+,+,+,+) indicate the signs of the imaginary parts of the vertical z , k zp f , k zp f and k zps , respectively. wavenumbers k0z , kem In Fig. 2, we construct a closed contour of integration by enclosing the RAI path OA with an semi-circular arc of infinite radius (A to L) in the upper half of the complex k plane, an integration path LO along the negative real axis, small arcs around the branch points and vertical branch cuts which are parallel to the imaginary axis and emanate from the branch points to the semi-circular arc of infinite radius. A similar contour of integration for calculating the individual waves for a borehole case is given by Liu & Chang (1996). In their paper, it is shown that the Sommerfeld branch cuts departing from the branch points kl are the equiphase lines of arg(klz ) = 0. If the integration path goes across these equiphase lines, the continuity of arg(klz ) requires that the signs of Im(klz ) should be changed, making the integrand shift from the principal Riemann sheet to the non-principal Riemann sheet or from one non-principal Riemann sheet to another. In Fig. 2, we find that the integration path intersects the five Sommerfeld branch cuts several times and is divided into several segments by those cuts. These segments are on the different Riemann sheets, because once the integration path passes across anyone of the Sommerfeld branch cuts Riemann sheet should be shifted. The determination of the Riemann sheet and the division of complex k-plane can be explained as follows. On the integration paths OA, AB and Bk ps the integrand is on the principal Riemann sheet denoted by (+,+,+,+,+), which z ), Im(k zp f ), Im(ksz ) and Im(k zps ) are all positive. When the path goes from the branch point k ps upwards to point C, means that Im(k0z ), Im(kem it crosses the k ps -branch cut making Im(k zps ) negative, and the integrand is then shifted onto the (+,+,+,+,−) Riemann sheet. Subsequently, the integration path goes from point C to point ks . Before the path goes through the k ps -branch cut Im(k zps ) remains negative and the integrand keeps on the (+,+,+,+,−) Riemann sheet. When the path passes through the k ps -branch cut, Im(k zps ) becomes positive and the integrand turns back onto the (+,+,+,+,+) sheet again. The path proceeds upwards from ks to E and goes in sequence through the ks - and k ps -branch cuts, making the integrand shift from the (+,+,+,+,+) sheet onto the (+,+,+,−,+) and (+,+,+,−,−) sheets, respectively. One can determine the Riemann sheets for the rest segments of the integration path from point E to point O using the same way. Finally, we find that the complex k-plane is divided into 16 Riemann sheets by the integration path. Each Riemann sheet is numbered and denoted by five plus/minus signs inside a parenthesis as shown in Fig. 2. For the case C p f < Cem < Cs < C ps , the distributions of the Sommerfeld branch cuts are shown in Fig. 3. In contrast to the case Cem < C p f < Cs < C ps (Fig. 2), the kem -branch cut is located above the k p f -branch cut and beneath the ks -branch cut. We construct a BCI path as shown in Fig. 3. The BCI and traditional RAI paths constitute a closed contour. Note that the BCI path is different from what is shown in Fig. 2 because the kem -branch cut is located above the k p f -branch cut. The complex k-plane is then divided into 15 Riemann sheets. For the case C p f < Cs < Cem < C ps , the distributions of the Sommerfeld branch cuts are shown in Fig. 4. Different from the cases Cem < C p f < Cs < C ps (Fig. 2) and C p f < Cem < Cs < C ps (Fig. 3), the kem -branch cut is located above the ks -branch cut and beneath the k ps -branch cut. The BCI path is constructed as shown in Fig. 4, and then the complex k-plane is divided into 14 Riemann sheets. 3.2 Wavefield representation Before we make transformation on the real-axis integrals in eqs (21)–(23), we first introduce a formula. Consider an integral expressed as follows +∞ Jm (kr )X (k)kdk. (29) I = 0 Early EM waves 1295 Figure 3. Partition of the complex k-plane and choices of the Riemann sheets for the case, C p f < Cem < Cs < C ps . The hyperbolic lines which depart from the branch points (solid points) are the Sommerfeld branch cuts, on which we have Im(klz ) = 0 with l = {0, em, p f , sv, ps}. OA is the RAI path. A BCI path including a semi-circle of infinite radius and five pairs of vertical branch cuts around the branch points is constructed. When the BCI path goes across the Sommerfeld branch cuts the integrand shifts from one Riemann sheet to another. The k-plane is divided into 15 Riemann sheets, each of which is numbered and denoted by five plus/minus signs inside a parenthesis. Figure 4. Partition of the complex k-plane and choices of the Riemann sheets for the case, C p f < Cs < Cem < C ps . The hyperbolic lines which depart from the branch points (solid points) are the Sommerfeld branch cuts, on which we have Im(klz ) = 0 with l = {0, em, p f , sv, ps}. OA is the RAI path. A BCI path including a semi-circle of infinite radius and five pairs of vertical branch cuts around the branch points is constructed. When the BCI path goes across the Sommerfeld branch cuts the integrand shifts from one Riemann sheet to another. The k-plane is divided into 14 Riemann sheets, each of which is numbered and denoted by five plus/minus signs inside a parenthesis. ξ̂1 (k,1) Here, X (k) can be ξ̂1 (k, m), ξ̂2 (k, m), ξ̂z (k, m) or a combination of ξ̂1 (k, m), ξ̂2 (k, m) and kr in eqs (21)–(23), for example ξ̂2 (k,1)−i . kr Therefore, the integral in eq. (29) can represent any term on the right sides of eqs (21)–(23). Using the property of the Bessel function 1 (1) Hm (kr ) + Hm(2) (kr ) , 2 we rewrite the integral in eq. (29) as +∞ +∞ 1 (1) (2) I = Hm (kr )X (k)kdk + Hm (kr )X (k)kdk , 2 0 0 Jm (kr ) = I1 Hm(1) (kr ) and where Im(kr ) → ∞, then Hm(1) (kr ) → 0, (30) (31) I2 Hm(2) (kr ) are the Hankel functions of m order. According to the property of the Hankel functions, we know that if (32) and Hm(2) (kr ) → ∞. (33) 1296 Y. Gao et al. Therefore the integrand in I1 in eq. (31) approaches zero whereas that in I2 becomes infinite on the semi-circular arc of infinite radius shown in Figs 2–4. With the closed integration contours that we have constructed in Figs 2–4, we apply Cauchy’s residue theorem for the integrand in I1 , and then obtain +∞ 0 Hm(1) (kr )X (k)kdk + Hm(1) (kr )X (k)kdk + cuts 0 Hm(1) (kr )X (k)kdk = 2πi −∞ I1 Res( p j ), (34) j I3 where ‘cuts’ represent the vertical integration paths around the branch points in Fig. 2–4 (e.g. path Jk0 K), and Res( p j ) is the residue at the jth pole. In eq. (34) the contribution from the semi-circular arc of infinite radius vanishes because of Jordan’s lemma. The contributions from the small arcs around each branch point are zero (Tang & Cheng 1991). Using the following property of the Hankel function Hm(1) (−kr ) = −(−1)m Hm(2) (kr ), (35) we transform the integral denoted by I3 in eq. (34) to I3 = ∞ Hm(2) (kr )(−1)m X (−k)kdk. (36) 0 In Appendix C, we derive that ξ̂1 (−k, 0) = −ξ̂1 (k, 0), (37) ξ̂2 (−k, 0) = −ξ̂2 (k, 0), (38) ξ̂z (−k, 0) = ξ̂z (k, 0), (39) ξ̂1 (−k, ±1) = ξ̂1 (k, ±1), (40) ξ̂2 (−k, ±1) = ξ̂2 (k, ±1), (41) ξ̂z (−k, ±1) = −ξ̂z (k, ±1), (42) ξ̂1 (−k, ±2) = −ξ̂1 (k, ±2), (43) ξ̂2 (−k, ±2) = −ξ̂2 (k, ±2), (44) ξ̂z (−k, ±2) = ξ̂z (k, ±2). (45) Because X (k) can be ξ̂1 (k, m), ξ̂2 (k, m), ξ̂z (k, m) or a combination of ξ̂1 (k, m), ξ̂2 (k, m) and kr , we find that for each term on the right sides of eqs (21)–(23) the following equation is valid (−1)m X (−k) = X (k). (46) We take eq. (21) for example. For the first term, with m = 0 we have ξ̂z (−k, 0) = ξ̂z (k, 0) according to eq. (39). For the second term, with m = 1 and ξ̂z (−k, 1) = −ξ̂z (k, 1), we have (−1)1 ξ̂z (−k, 1) = ξ̂z (k, 1). For the third term, with m = −1 and ξ̂z (−k, −1) = −ξ̂z (k, −1), we then have (−1)−1 ξ̂z (−k, 1) = ξ̂z (k, 1). One can further verifies that eq. (46) is always true for the rest terms on the right sides of eqs (21)–(23). Using eq. (46), we can transform eq. (36) to I3 = ∞ Hm(2) (kr )X (k)kdk = I2 . (47) 0 Combining eqs (29), (31), (34) and (47) yields I = I1 + I2 = I1 + I3 = − Hm(1) (kr )X (k)kdk + 2πi cuts j Res( p j ). (48) Early EM waves 1297 Substituting X (k) by ξ̂1 (k, m), ξ̂2 (k, m), ξ̂z (k, m) and the combination of ξ̂1 (k, m), ξ̂2 (k, m) and kr into eqs (21)–(23), we can rewrite these three equations as (1) kdk{ H0 (kr )ξ̂z (k, 0) ξz (r, θ, z, ω) = − cuts (1) + H1 (kr )ξ̂z (k, 1)eiθ − H1 (kr )ξ̂z (k, −1)e−iθ (1) (1) + H2 (kr )ξ̂z (k, 2)e2iθ (49) + H2 (kr )ξ̂z (k, −2)e−2iθ } Res( p j )m , + 2πi (1) m=0,±1,±2 j (1) ξr (r, θ, z, ω) = − kdk{i H1 (kr )ξ̂1 (k, 0) cuts + ξ̂2 (k, 1) (1) H1 (kr ) − i ξ̂1 (k, 1) (1) + i H2 (kr )ξ̂1 (k, 1) eiθ kr ξ̂2 (k, −1) − i ξ̂1 (k, −1) (1) + i H0 (kr )ξ̂1 (k, −1) e−iθ kr ξ̂2 (k, 2) − i ξ̂1 (k, 2) (1) (1) + i H3 (kr )ξ̂1 (k, 2) e2iθ + 2H2 (kr ) kr ξ̂2 (k, −2) − i ξ̂1 (k, −2) (1) (1) − i H1 (kr )ξ̂1 (k, −2) e−2iθ } + −2H2 (kr ) kr Res( p j )m , + 2πi (1) + H1 (kr ) m=0,±1,±2 (50) j (1) ξθ (r, θ, z, ω) = − kdk{−i H1 (kr )ξ̂2 (k, 0) cuts + ξ̂1 (k, 1) (1) H1 (kr ) + i ξ̂2 (k, 1) (1) − i H2 (kr )ξ̂2 (k, 1) eiθ kr ξ̂1 (k, −1) + i ξ̂2 (k, −1) (1) − i H0 (kr )ξ̂2 (k, −1) e−iθ kr ξ̂1 (k, 2) + i ξ̂2 (k, 2) (1) (1) + 2H2 (kr ) − i H3 (kr )ξ̂2 (k, 2) e2iθ kr ξ̂1 (k, −2) + i ξ̂2 (k, −2) (1) (1) + i H1 (kr )ξ̂2 (k, −2) e−2iθ } + −2H2 (kr ) kr Res( p j )m . + 2πi (1) + H1 (kr ) m=0,±1,±2 (51) j Finally, we find that the total wavefield is represented by a sum of integrals along the vertical branch cuts and the residues of the poles. One can solve the frequency-domain response of the field ξ by using eqs (49)–(51), and then obtain its time-domain waveform by applying an inverse Fourier transform. 4 C O N C LU S I O N S A N D D I S C U S S I O N S We developed a BCI algorithm to calculate the seismoelectric wave fields generated by an earthquake, which is modelled by a moment tensor point source. To theoretically model the coupling between the seismic and EM waves in an electrokinetic nature, Pride’s equations were utilized. As a traditional way to calculate the seismoelectric wavefields in a layered formation, the RAI method was reviewed and the corresponding formulations were presented. Because the integration with respect to the wavenumber k is performed along the real axis of the complex k plane, only full waveforms could be obtained by the RAI method. Instead, a BCI path in the upper half of the complex k plane was constructed, comprising of a semi-circular arc of infinite radius, five pairs of vertical branch cuts, small arcs around the branch points and the negative real axis. The BCI path plus the RAI path, that is the positive real axis, constitutes a closed contour on the complex k plane. By applying Cauchy’s residual theorem, we transformed the original real axis integral to one along the vertical branch cuts plus the residues 1298 Y. Gao et al. of the poles that are located in the closed contour. The detailed formulations associated with the BCI method were derived and shown as eqs (49)–(51). To perform the integration along the BCI path, one should note that the path is partitioned by the Sommerfeld branch cuts to several segments, which are located on different Riemann sheets. The determination of the Riemann sheets were explained and displayed in Figs 2–4. One should also pay attention to the poles. Although all poles are complex in value, only the pole located in the principal Riemann sheet does not carry energy away from the interface. This non-leaky pole contributes to the guided wave, that is the Rayleigh wave, as a half-space model is used in this study. Because there are also integration path segments which lie on the non-principal Riemann sheets, the leaky poles need to be taken into account. It was pointed out by Liu & Chang (1996) that the residues of the leaky poles near the vertical branch cuts should be included, otherwise the result will deviate from the true solution. Although the BCI technique is not as straightforward as the RAI one, it offers certain advantage. The BCI technique provides a possibility to separate individual waves, because the wavefields shown in eqs (49)–(51) are divided into the contributions from the integrals along the vertical branch cuts and the residues of the poles. For an acoustic logging case, using a similar BCI technique, Liu & Chang (1996) calculated the compressional head wave by calculating the integral along the vertical branch cut around the P-wave branch point and the residues of the leaky poles near that branch cut. It was shown that the head wave evaluated by the BCI technique agrees well with that in the full waveform resulting from the RAI method. Our ultimate purpose is to reveal the characteristics of the early EM wave caused by an earthquake. We expect the early EM waves could be evaluated by implementing the integration along the vertical branch cuts around the k0 and kem branch points and calculating the residues of the leaky poles (if any) near the two cuts. This expectation shall be examined in the companion paper (Gao et al. 2012). In a summary, a BCI technique for the purpose of calculating the early EM wave was established. In theory, full waveforms calculated by such a technique is equivalent to that by the RAI one. The equivalence and the validity of our BCI technique shall be examined in Gao et al. (2012), where application of the BCI technique to numerical investigations on the early EM wave shall also be presented. AC K N OW L E D G M E N T S This work is supported by National Natural Science Foundation of China (Grant Nos. 41204039, 41174110, 41090293), Special Funds for Sciences and Technology Research of Public Welfare Trades (Grant No. 201011044), China Postdoctoral Science Foundation funded project (Grant No. 2012M511413) and Chinese Academy of Sciences/State Administration of Foreign Experts Affairs International Partnership Program for Creative Research Teams. REFERENCES Aki, K. & Richards, P.G., 2002. Quantitative Seismology, University Science Books, Sausalito, California. Bayanheshig, Ma, J., Zhang, W. & Wang, K., 2002. Numerical analysis of partial and full wave acoustic field in the fluid layer embedded in Biot two-phase medium, J. Geophys., 45(Suppl), 274–288. Bernard, P., 1992. Plausibility of long distance electrotelluric precursors to earthquakes, J. geophys. Res., 97(B12), 17 531–17 546. Bordes, C., Jouniaux, L., Dietrich, M., Pozzi, J.P. & Garambois, S., 2006. First laboratory measurements of seismo-magnetic conversions in fluid-filled Fontainebleau sand, Geophys. Res. Lett., 33(1), L01302, doi:10.1029/2005GL024582. Bordes, C., Jouniaux, L., Garambois, S., Dietrich, M., Pozzi, J.P. & Gaffet, S., 2008. Evidence of the theoretically predicted seismo-magnetic conversion, Geophys. J. Int., 174(2), 489–504. Bouchon, M. & Aki, K., 1977. Discrete wave-number representation of seismic-source wave fields, Bull. seism. Soc. Am., 67(2), 259– 277. Butler, K.E., Russell, R.D., Kepic, A.W. & Maxwell, M., 1996. Measurement of the seismoelectric response from a shallow boundary, Geophysics, 61(6), 1769–1778. Chandler, R.N. & Johnson, D.L., 1981. The equivalence of quasistatic flow in fluid-saturated porous-media and Biot’s slow-wave in the limit of zero frequency, J. Appl. Phys., 52(5), 3391–3395. Chen, X., 1999. Seismogram synthesis in multi-layered half-space Part I. Theoretical formulations, Earth. Res. China, 13, 149–174. Chew, W.C., 1990. Waves and Fields in Inhomogenous Media, Van Nostrand Reinhold, New York. Fuchs, K. & Müller, G., 1971. Computation of synthetic seismograms with the reflectivity method and comparison with observations, Geophys. J. R. astr. Soc., 23(4), 417–433 Gao, Y. & Hu, H., 2010. Seismoelectromagnetic waves radiated by a double couple source in a saturated porous medium, Geophys. J. Int., 181(2), 873–896. Gao, Y., Chen, X., Hu, H. & Zhang, J., 2012. Early electromagnetic waves from earthquake rupturing: II. validation and numerical experiments, Geophys. J. Int, doi:10.1093/gji/ggs097. Garambois, S. & Dietrich, M., 2001. Seismoelectric wave conversions in porous media: field measurements and transfer function analysis, Geophysics, 66(5), 1417–1430. Garambois, S. & Dietrich, M., 2002. Full waveform numerical simulations of seismoelectromagnetic wave conversions in fluidsaturated stratified porous media, J. geophys. Res., 107(B7), 2148, doi:10.1029/2001JB00316. Guan, W. & Hu, H., 2008. Finite-difference modeling of the electroseismic logging in a fluid-saturated porous formation, J. Comput. Phys., 227(11), 5633–5648. Haartsen, M.W. & Pride, S.R., 1997. Electroseismic waves from point sources in layered media, J. geophys. Res., 102(B11), 24 745–24 769. He, X. & Hu, H., 2009. Borehole flexural modes in transversely isotropic formations: low-frequency asymptotic velocity, Geophysics, 74(4), E149– E158. Honkura, Y., Matsushima, M., Oshiman, N., Tunçer, M.K., Bariş, Ş., Ito, A., Iio, Y. & Işikara, A.M., 2002. Small electric and magnetic signals observed before the arrival of seismic wave, Earth Planets and Space, E-letter, 54(12), E9–E12. Hu, H. & Gao, Y., 2011. Electromagnetic field generated by a finite fault due to electrokinetic effect, J. geophys. Res., 116, B08302, doi:10.1029/2010JB007958. Hu, H. & Liu, J., 2002. Simulation of the converted electric field during acoustoelectric logging, SEG Expanded Abstr., 1817–1820. Huang, Q., 2002. One possible generation mechanism of co-seismic electric signals, Proc. Japan. Acad., 78(7), 173–178. Jouniaux, L. & Ishido, T., 2012. Electrokinetics in Earth sciences: a tutorial, Int. J. Geophys., doi:10.1155/2012/286107. Early EM waves Karakelian, D., Beroza, G.C., Klemperer, S.L. & Fraser-Smith, A.C., 2002. Analysis of ultralow-frequency electromagnetic field measurements associated with the 1999 M 7.1 Hector Mine, California, earthquake sequence, Bull. seism. Soc. Am., 92(4), 1513–1524. Kawai, K., Takeuchi, N. & Geller, R.J., 2006. Complete synthetic seismograms up to 2 Hz for transversely isotropic spherically symmetric media, Geophys. J. Int., 164, 411–432. Kennett, B.L.N. & Kerry, N.J., 1979. Seismic-waves in a stratified half Space, Geophys. J. R. astr. Soc., 57(3), 557–583. Kurkjian, A.L., 1985. Numerical computation of individual far-field arrivals excited by an acoustic source in a borehole, Geophysics, 50(5), 852–866. Liu, Q.H. & Chang, C., 1996. Compressional head waves in attenuative formations: Forward modeling and inversion, Geophysics, 61(6), 1908– 1920. Løseth, L.O., Pedersen, H.M., Ursin, B., Amundsen, L. & Ellingsrud, S., 2006. Low-frequency electromagnetic fields in applied geophysics: Waves or diffusion? Geophysics, 71(4), W29–W40. Matsushima, M. et al., 2002. Seismoelectromagnetic effect associated with the İzmit earthquake and its aftershocks, Bull. seism. Soc. Am., 92(1), 350–360. Mikhailov, O.V., Haartsen, M.W. & Toksöz, M.N., 1997. Electroseismic investigation of the shallow subsurface: field measurements and numerical modeling, Geophysics, 62(1), 97–105. Nagao, T., Orihara, Y., Yamaguchi. T., Takahashi., I., Hattori, K., Noda, Y., Sayanagi, K. & Uyeda, S., 2000. Co-seismic geoelectric potential changes observed in Japan, Geophys. Res. Lett., 27(10), 1535–1538. Okubo, K., Takeuchi, N., Utsugi, M., Yumoto, K. & Sasai, Y., 2011. Direct magnetic signals from earthquake rupturing: Iwate-Miyagi earthquake of M 7.2, Japan, Earth planet. Sci. Lett., 305(1–2), 65–72. Peterson, E.W., 1974. Acoustic-wave propagation along a fluid-filled cylinder, J. Appl. Phys., 45(8), 3340–3350. Pozzi, J.-P. & Jouniaux, L., 1994. Electrical effects of fluid circulation in sediments and seismic prediction, C.R. Acad. Sci. Paris, 318(1), 73–77. Pride, S.R., 1994. Governing equations for the coupled electromagnetics and acoustics of porous-media, Phys. Rev. B, 50(21), 15 678–15 696. Pride, S.R. & Haartsen, M.W., 1996. Electroseimic wave properties, J. acoust. Soc. Am., 100, 1301–1315. 1299 Ren, H., Chen, X. & Huang, Q., 2012. Numerical simulation of coseismic electromagnetic fields associated with seismic waves due to finite faulting in porous media, Geophys. J. Int., 188(2), 925–944. Ren, H., Huang, Q. & Chen, X., 2010. Analytical regularization of the highfrequency instability problem in numerical simulation of seismoelectric wave-fields in multi-layered porous media, Chinese. J. Geophys., 53(3), 506–511. Revil, A. & Jardani, A., 2010. Seismoelectric response of heavy oil reservoirs: theory and numerical modelling, Geophys. J. Int., 180(2), 781–797. Schakel, M.D., Smeulders, D.M.J., Slob, E.C. & Heller, H.K.J., 2011. Seismoelectric interface response: Experimental results and forward model, Geophysics, 76(4), N29–N36. Tang, J. et al., 2008. Coseismic signal associated with aftershock of the Ms 8.0 Wenchuan earthquake. Seismol. Geol., 30(3), 739–745. Tang, X. & Cheng, C.H., 1991.ON The “resonant compressional and shear waves” in a fluid-filled borehole, Chinese. J. Geophys., 34(1), 125–128. Thompson, A.H. & Gist, G.A., 1993. Geophysical application of electrokinetic conversionn, Leading Edge, 12, 1169–1173. Tsang, L. & Rader, D., 1979. Numerical evaluation of the transient acoustic waveform due to a point source in a fluid-filled borehole, Geophysics, 44(10), 1706–1720. Yamazaki, K., 2012. Estimation of temporal variations in the magnetic field arising from the motional induction that accompanies seismic waves at a large distance from the epicentre, Geophys. J. Int., 190, 1393– 1403. Zhang, X., Zhang, H. & Wang, X., 2009. Acoustic mode waves and individual arrivals excited by a dipole source in fluid-filled boreholes, Sci. China. Ser. G, 52(6), 822–831. Zhu, Z., Haartsen, M.W. & Toksöz, M.N., 2000. Experimental studies of seismoelectric conversions in fluid-saturated porous media, J. geophys. Res., 105(B12), 28 055–28 064. Zhu, Z., Toksöz, M.N. & Burns, D.R., 2008. Electroseismic and seismoelectric measurements of rock samples in a water tank, Geophysics, 73(5), E153-E164. Zyserman, F.I., Gauzellino, P.M. & Santos, J.E., 2010. Finite element modeling of SHTE and PVSTM electroseismics, J. appl. Geophys., 72(2), 79–91. A P P E N D I X A : S O L U T I O N S O F WAV E F I E L D S I N T H E P S V T M A N D S H T E S Y S T E M S F O R T H E H A L F - S PA C E M O D E L A1 PSVTM system For PSVTM system the displacement-stress-EM vector BV in eq. (6) is expressed as BV (z) = DV WV (z), (A1) where DV is a 8 × 8 matrix, DV = b−P f , b−Ps , b−SV , b−T M , b+P f , b+Ps , b+SV , b+T M , (A2) and WV (z) is a 8 × 1 vector representing the amplitudes of the downgoing and upgoing waves, WV (z) = [wz−P f , wz−Ps , wz−SV , wz−T M , wz+P f , wz+Ps , wz+SV , wz+T M ]T . (A3) The expressions of b∓P f , b∓Ps , b∓SV and b∓T M have been derived by Haartsen & Pride (1997). Here, we rewrite them as b∓P f = [D11 p, ± D21 , ± D31 , ± D41 p, D51 , D61 , D71 , D81 p]T , (A4) b∓Ps = [D12 p, ± D22 , ± D32 , ± D42 p, D52 , D62 , D72 , D82 p]T , (A5) b∓SV = [±D13 , D23 p, D33 p, D43 , ∓ D53 p, D63 , D73 , ± D83 ]T , (A6) b∓T M = [±D14 , D24 p, D34 p, D44 , ∓ D54 p, D64 , D74 , ± D84 ]T , (A7) 1300 Y. Gao et al. where ⎡ ⎤ ⎡ ! ⎤ D11 1 spf ⎢ ⎥ ⎢ ⎥ ! ⎢D ⎥ ⎢ ⎥ ⎢ 21 ⎥ ⎢ q p f s p f ⎥ ⎢ ⎥ ⎢ ⎥ ! ⎢D ⎥ ⎢ ⎥ ⎢ 31 ⎥ ⎢ a p f q p f s p f ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ! ⎥ ⎢ D41 ⎥ ⎢ 2iωGq p f s p f ⎥ ⎢ ⎥ ⎢ ⎥, ⎢ ⎥=⎢ ⎢ D51 ⎥ ⎢ iωs p f (H − 2Gp2 /s 2 + a p f C) ⎥ ⎥ pf ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ D61 ⎥ ⎢ iωs (C + a M) ⎥ pf pf ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎥ ⎢ D71 ⎥ ⎢ ⎥ 0 ⎢ ⎥ ⎢ ⎣ ⎦ ⎣ ⎦ D81 b p f /s p f ⎡ ! ⎤ 1 s ps ⎢ ⎥ ⎢ ⎥ ⎢ D ⎥ ⎢ q !s ⎥ ⎢ 22 ⎥ ⎢ ps ps ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ D ⎥ ⎢ a q !s ⎥ ⎢ 32 ⎥ ⎢ ps ps ps ⎥ ⎢ ⎥ ⎢ ⎥ ! ⎢ ⎥ ⎢ ⎥ ⎢ D42 ⎥ ⎢ 2iωGq ps s ps ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥=⎢ ⎥, 2 2 ⎢ D52 ⎥ ⎢ iωs ps (H − 2Gp /s ps + a ps C) ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ D62 ⎥ ⎢ iωs ps (C + a ps M) ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ D72 ⎥ ⎢ 0 ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ D82 b ps /s ps ⎡ ⎡ D12 ⎤ ⎡ ⎤ ⎤ (A10) ⎡ ⎤ ! qem sem ⎢ ! ⎢ ⎥ ⎥ ⎢ −1 s ⎢D ⎥ ⎥ em ⎢ ⎢ 24 ⎥ ⎥ ⎢ ⎢ ⎥ ⎥ ⎢ −a !s ⎢D ⎥ ⎥ ⎢ em em ⎢ 34 ⎥ ⎥ ⎢ ⎢ ⎥ ! ⎥ ⎢ ⎢ ⎥ ⎥ 2 2 ⎢ iωG(qem − p ) sem ⎥ ⎢ D44 ⎥ ⎢ ⎢ ⎥ ⎥ ⎢ ⎥,= ⎢ ⎥, ⎢ 2iωGqem /sem ⎢ D54 ⎥ ⎥ ⎢ ⎢ ⎥ ⎥ ⎢ ⎢ ⎥ ⎥ ⎢0 ⎢ D64 ⎥ ⎥ ⎢ ⎢ ⎥ ⎥ ⎢ ⎢ ⎥ ⎥ ⎢ bem sem /μ ⎢ D74 ⎥ ⎥ ⎢ ⎢ ⎥ ⎥ ⎣ ⎣ ⎦ ⎦ D84 bem qem /sem D14 (A9) ⎡ ⎤ ! q s ss ⎢ ! ⎢ ⎥ ⎥ ⎢ −1 s ⎢D ⎥ ⎥ s ⎢ ⎢ 23 ⎥ ⎥ ⎢ ⎢ ⎥ ⎥ ⎢ −a !s ⎢D ⎥ ⎥ ⎢ s s ⎢ 33 ⎥ ⎥ ⎢ ⎢ ⎥ ! ⎥ ⎢ ⎢ ⎥ ⎥ 2 2 ⎢ iωG(qs − p ) ss ⎥ ⎢ D43 ⎥ ⎢ ⎢ ⎥ ⎥ ⎢ ⎥,= ⎢ ⎥, ⎢ 2iωGqs /ss ⎢ D53 ⎥ ⎥ ⎢ ⎢ ⎥ ⎥ ⎢ ⎢ ⎥ ⎥ ⎢0 ⎢ D63 ⎥ ⎥ ⎢ ⎢ ⎥ ⎥ ⎢ ⎢ ⎥ ⎥ ⎢ bs ss /μ ⎢ D73 ⎥ ⎥ ⎢ ⎢ ⎥ ⎥ ⎣ ⎣ ⎦ ⎦ D83 bs qs /ss D13 (A8) (A11) where μ is the magnetic permeability. ql = sl2 − p2 with l = { p f, ps, s, em}. al are the amplitude ratios of the relative fluid-solid displacement to the solid displacement, that is w/u, whereas bl are the amplitude ratios of the electric field to the displacement, that is E/u for the body waves travelling in the porous medium. Their expressions as well as the slownesses sl are listed in Appendix B. As sl and ql are even in p, we easily find that Di j with i, j = {1, 2, ..., 8} are all even functions of p. According to Kennett & Kerry (1979) and Haartsen & Pride (1997), the effect of the source is represented by a displacement-stress-EM discontinuity vector S = B s+1 (z s ) − B s (z s ) = DW(z s ), (A12) Early EM waves 1301 where, W(z s ) is the amplitudes of the downgoing and upgoing waves at depth z s . For the PSVTM system, eq. (A12) can be written as ⎡ D11 p D12 p ⎢ ⎢D ⎢ 21 ⎢ ⎢D ⎢ 31 ⎢ ⎢ ⎢ D41 p ⎢ ⎢ ⎢ D51 ⎢ ⎢ ⎢ D61 ⎢ ⎢ ⎢0 ⎢ ⎣ D81 p D12 p − D13 D11 p − D14 D13 D14 D22 D23 p D24 p − D21 − D22 D23 p D24 p D32 D33 p D34 p − D31 − D32 D33 p D34 p D42 p D43 D44 − D41 p − D42 p D51 D52 D52 D53 p D62 0 0 D61 0 D73 D74 0 D82 p D54 p D83 D84 D81 p D43 D44 − D53 p − D54 p D62 0 0 0 D73 D74 D82 p − D83 − D84 DV ⎤⎡ ws−P f ⎤ ⎡ s1 ⎤ ⎥⎢ ⎥ ⎢ ⎥ ⎥ ⎢ w−Ps ⎥ ⎢ s ⎥ ⎥⎢ s ⎥ ⎢ 2⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎥ ⎢ w−SV ⎥ ⎢ s ⎥ ⎥⎢ s ⎥ ⎢ 3⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎥ ⎢ −T M ⎥ ⎢ ⎥ ⎥ ⎢ ws ⎥ ⎢ s4 ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎥⎢ ⎥ = ⎢ ⎥. +P f ⎥ ⎢ −ws ⎥ ⎢ s5 ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎥⎢ ⎥ ⎢ ⎥ +Ps ⎥ ⎢ −ws ⎥ ⎢ s6 ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎥ ⎢ −ws+SV ⎥ ⎢ s7 ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎦⎣ ⎦ ⎣ ⎦ +T M −ws s8 WV (z s ) (A13) SV Using the expressions of SV for the moment tensor sources shown in eqs (15), (17) and (19), one can solve eq. (A13) to obtain the unknown amplitudes of the downgoing and upgoing waves at z = z s , that is WV (z s ). Then the amplitudes of the upgoing waves at the free surface +P f z = z 0 , that is w0 , w0+Ps , w0+SV and w0+T M , can be obtained using the following relation ⎡ +P f w0 ⎤ ⎡ ⎢ +Ps ⎥ ⎢ ⎢w ⎥ ⎢ ⎢ 0 ⎥ ⎢ ⎢ ⎥ ⎢ ⎢ w+SV ⎥ = ⎢ ⎢ 0 ⎥ ⎢ ⎣ ⎦ ⎣ +T M w0 ⎤⎡ eiωq p f zs eiωq ps zs eiωqs zs eiωqem zs ws+P f ⎤ ⎥ ⎢ +Ps ⎥ ⎥⎢w ⎥ ⎥⎢ s ⎥ ⎥⎢ ⎥ ⎥ ⎢ w+SV ⎥ . ⎥⎢ s ⎥ ⎦⎣ ⎦ +T M ws (A14) Using the conditions at the free surface shown in eq. (9), we have ⎡ J−V −P f w0 ⎤ ⎢ ⎥ ⎢ w−Ps ⎥ ⎢ 0 ⎥ ⎢ ⎥ ⎢ w−SV ⎥ ⎡ 0 ⎤ ⎢ 0 ⎥ ⎢ ⎥ ⎥ ⎢ −T M ⎥ ⎢ 0⎥ ⎢ w0 ⎥ ⎢ ⎢ ⎥ ⎢ ⎥ ⎥, J+V × ⎢ +P f ⎥ = ⎢ ⎥ ⎢ w0 ⎥ ⎢ 0 ⎢ ⎥ ⎢ ⎥ ⎢ +Ps ⎥ ⎣ ⎦ ⎢ w0 ⎥ 0 ⎢ ⎥ ⎢ +SV ⎥ ⎢w ⎥ ⎢ 0 ⎥ ⎣ +T M ⎦ w0 (A15) where, ⎡ JV ;± ±D41 p ⎢ ⎢ D51 ⎢ =⎢ ⎢ D61 ⎢ ⎣ D81 ε0 p ± D42 p D43 D44 D52 ∓ D53 p ∓ D54 p D62 0 D82 ε0 p μ0 D73 ± ε0 D83 0 μ0 D73 ± ε0 D83 ⎤ ⎥ ⎥ ⎥ ⎥. ⎥ ⎥ ⎦ (A16) 1302 Y. Gao et al. Then we solve the amplitudes of the downgoing waves at the free surface according to eq. (A15). The amplitudes of the upgoing and downgoing waves at an arbitrary depth z (0 ≤ z < z s ) can be obtained from the following equation ⎤ ⎡ −P f ⎤ ⎡ −P f ⎤ ⎡ iωq z e pf w0 wz ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ w−Ps ⎥ ⎢ w−Ps ⎥ ⎢ eiωq ps z ⎥ ⎢ ⎥⎢ 0 ⎥ ⎢ z ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎢ ⎥ ⎢ w−SV ⎥ ⎢ −SV ⎥ iωqs z e ⎥ ⎢ ⎥ ⎢ w0 ⎥ ⎢ z ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ −T M ⎥ ⎢ −T M ⎥ ⎢ iωqem z e ⎥ ⎢ ⎥ ⎢ w0 ⎥ ⎢ wz ⎥ ⎢ ⎥⎢ ⎥ ⎢ (A17) ⎢ ⎥ ⎥. ⎢ +P f ⎥ = ⎢ +P f −iωq z pf ⎥ ⎢ ⎥ ⎢ w0 ⎥ ⎢ wz e ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ +Ps ⎥ ⎢ +Ps ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ w0 ⎥ ⎢ wz e−iωq ps z ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎢ ⎥ ⎥ ⎢ +SV ⎥ ⎢ +SV ⎥ −iωqs z ⎢ ⎥ ⎢ ⎥ ⎢ wz e ⎥ ⎢ ⎥ ⎢ w0 ⎥ ⎢ ⎦ ⎣ +T M ⎦ ⎣ +T M ⎦ ⎣ −iωqem z wz e w0 Finally, by using BV = DV WV we solve the components of the solid displacement, the electric and magnetic fields ⎡ −P f ⎤ wz ⎢ ⎥ ⎢ w−Ps ⎥ ⎢ z ⎥ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ û 1 D11 p D12 p D13 D14 D11 p D12 p − D13 − D14 ⎢ w−SV ⎥ ⎢ z ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ û z ⎥ ⎢ D21 D22 D23 p D24 p − D21 − D22 D23 p D24 p ⎥ ⎢ −T M ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ wz ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ Ĥ2 ⎥ ⎢ 0 D74 0 0 D73 D74 ⎥ 0 D73 ⎢ ⎥=⎢ ⎥ × ⎢ +P f ⎥ . ⎢ wz ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ Ê ⎥ ⎢ D p D p D D84 D81 p D82 p − D83 − D84 ⎥ 82 83 ⎢ +Ps ⎥ ⎢ 1 ⎥ ⎢ 81 ⎥ ⎢ wz ⎥ ⎣ ⎦ ⎣ ⎦ ⎢ ⎥ D21 b p f D22 b ps D23 pbsv D24 pbem − D21 b p f − D22 b p f D23 pb p f D24 pb p f Ê z ⎢ +SV ⎥ ⎢ wz ⎥ ⎢ ⎥ ⎣ +T M ⎦ wz (A18) A2 SHTE system For SHTE system the displacement-stress-EM vector B H in eq. (7) is expressed as B H (z) = D H W H (z), (A19) where D H is a 4 × 4 matrix, D H = [b−S H , b−T E , b+S H , b+T E ], (A20) with ⎡ b∓S H b ⎤ ⎥ ⎢ ⎢ ∓iωqs G ⎥ ⎥ ⎢ ⎥ =⎢ ⎢ ∓bs qs !μ ⎥ , ⎥ ⎢ ⎦ ⎣ bs ⎡ ∓T M 1 1 (A21) ⎤ ⎥ ⎢ ⎢ ∓iωqem G ⎥ ⎥ ⎢ ⎥ =⎢ ⎢ ∓bem qem !μ ⎥ . ⎥ ⎢ ⎦ ⎣ bem W H (z) represents the amplitudes of the downgoing and upgoing waves W H (z) = wz−S H , wz−T E , wz+S H , wz+T E . (A22) (A23) Early EM waves For the SHTE system, the contribution of the source shown in eq. (A12) is represented as ⎡ −S H ⎤ ws ⎢ −T E ⎥ ⎢w ⎥ ⎥ −S H −T E +S H +T E ⎢ s H ⎢ ⎥ b ,b ,b ,b ⎢ −w+S H ⎥ = S . ⎢ ⎥ s ⎣ ⎦ DH −ws+T E 1303 (A24) W H (z s ) H Using the expressions of S for moment tensor sources shown in eqs (16), (18) and (20), one can solve eq. (A24) and get the unknown amplitudes of the downgoing and upgoing waves at z = z s , that is W H (z s ). The amplitudes of the upgoing waves at the free surface z = z 0 , denoted by w0+S H and w0+T E can then be obtained using the following relation ⎡ +S H ⎤ ⎡ iωq z ⎤ ⎡ +S H ⎤ w0 e ss ws ⎣ +T E ⎦ = ⎣ ⎦⎣ ⎦. (A25) iωqem z s w0 e ws+T E With the boundary conditions at the free surface shown in eq. (10), we have ⎤ ⎡ −S H ⎤ ⎡ qem w0 qs ⎦ ⎣ −T E ⎦ ⎣ bs (μq0 + μ0 qs ) bem (μq0 + μ0 qem ) w0 ⎡ ⎤ ⎡ +S H ⎤ − qem − qs w0 ⎦ ⎣ +T E ⎦ . = −⎣ bs (μq0 − μ0 qs ) bem (μq0 − μ0 qem ) w0 (A26) After solving w0−S H , w0−T E , w0+S H and w0+T E , we can obtain the amplitudes of the downgoing and upgoing waves at an arbitrary depth z(0 ≤ z < z s ) ⎡ −S H ⎤ ⎡ iωqs z ⎤ ⎡ −S H ⎤ e w0 wz ⎢ −T E ⎥ ⎢ iωq z ⎥ ⎢ −T E ⎥ ⎢w ⎥ ⎢ e em ⎥⎢w ⎥ ⎢ z ⎥ ⎢ ⎥⎢ 0 ⎥ ⎢ ⎥=⎢ ⎥⎢ ⎥ (A27) ⎢ w+S H ⎥ ⎢ ⎥ ⎢ w+S H ⎥ e−iωqs z ⎢ z ⎥ ⎢ ⎥⎢ 0 ⎥ ⎣ ⎦ ⎣ ⎦⎣ ⎦ wz+T E e−iωqem z w0+T E Finally, we solve the displacement û 2 , the electric field Ê 2 , the magnetic fields Ĥ1 and Ĥz using following relation ⎤ ⎡ −S H ⎤ ⎤ ⎡ û 2 wz 1 1 1 1 ⎢ ⎥ ⎢ ⎥ ⎢ −T E ⎥ ! ! ! ! ⎢ ⎢ Ĥ1 ⎥ ⎢ −bs qs μ − bem qem μ ⎥ ⎥ bs qs μ bem qem μ ⎥ ⎢ wz ⎢ ⎥ ⎢ ⎥ ⎢ ⎥=⎢ ⎥⎢ ⎥ ⎢ Ê 2 ⎥ ⎢ bs ⎥ ⎢ w+S H ⎥ . b b b em s em ⎢ ⎥ ⎢ ⎥⎢ z ⎥ ⎣ ⎦ ⎣ ⎦⎣ ⎦ ! ! ! ! bs p μ bem p μ bs p μ bem p μ wz+T E Ĥz ⎡ (A28) A P P E N D I X B : S L O W N E S S E S O F T H E B O D Y WAV E S I N T H E P O R O U S M E D I U M The slownesses of the compressional waves are expressed as " ρt 4ρ̃ρ ρ̃ L 2 2 2s p f, ps = γ ∓ γ − , + H M − C2 ρ ε̃ (B1) where the sign ‘−’ corresponds to the P f wave whereas the sign ‘+’ corresponds to the Ps wave, γ = ρ M + ρ̃ H (1 + ρ̃ L 2 /ε̃) − 2ρ f C , H M − C2 ρt = ρ − ρ 2f /ρ̃. (B2) (B3) ρ = (1 − φ)ρs + φρ f is the bulk density. ρs and ρ f are densities of the solid grain and the pore fluid, respectively. ρ̃ = iη/ωκ is the effective complex fluid density, where η is the fluid viscosity and κ is the dynamic permeability. L is the dynamic electrokinetic coupling coefficient. ε̃ = ε + iσ/ω − ρ̃ L 2 is the effective complex electrical permittivity of the material, where σ is electrical conductivity and ε is the electrical permittivity of the bulk material and can be expressed by the permittivity of the vacuum ε0 , the porosity φ, the solid grain permittivity εs , the 1304 Y. Gao et al. fluid permittivity ε f and the tortuosity α∞ as ε = ε0 [φ(ε f − εs )/α∞ + εs ]. In earthquake wave frequency band (less than several hertz), κ, L and σ vary little with the frequency and they are taken as their respective static values, that is κ0 , L 0 and σ0 . The slownesses of the transverse waves are 2 2ss,em ρ̃ L 2 ρt + με̃ 1 + ± = G ε̃ " ρ̃ L 2 ρt − με̃(1 + ) G ε̃ 2 − 4μ ρ 2f L 2 G , (B4) where the sign ‘+’ in front of radical corresponds to the S wave whereas the sign ‘−’ corresponds to the EM wave.The amplitude ratios of the relative fluid-solid displacement to the solid displacement for the four body waves, that is al with l = { p f, ps, sv, em}, are apf = − a ps = − H s 2p f − ρ Cs 2p f − ρ f , (B5) H s 2ps − ρ , Cs 2ps − ρ f G 2 ρ , as = ss − ρf G G 2 ρ aem = . sem − ρf G (B6) (B7) (B8) The amplitude ratios of the electric field to the solid displacement, that is bl , are iωρ̃ L apf , ε̃ iωρ̃ L a ps , b ps = ε̃ iωμρ̃ L as , bs = − 2 ss − με̃ iωμρ̃ L aem . bem = − 2 sem − με̃ bpf = (B9) (B10) (B11) (B12) A P P E N D I X C : P RO O F O F E Q S ( 3 7 ) – ( 4 5 ) For the PSVTM system, we denote Q1 = diag([1, p, p, 1, p, 1, 1, 1]). By left-multiplying the both sides of eq. (A13) by Q1 , one obtains Equation ⎡ D11 p D12 p ⎢ ⎢D p ⎢ 21 ⎢ ⎢D p ⎢ 31 ⎢ ⎢ ⎢ D41 p ⎢ ⎢ ⎢ D51 p ⎢ ⎢ ⎢ D61 p ⎢ ⎢ ⎢0 ⎢ ⎣ D81 p D13 D14 D11 p D23 p2 D24 p2 − D21 p D32 p D33 p2 D34 p2 D42 p D43 D52 p D53 p2 D54 p2 D62 p 0 0 0 D73 D74 D82 p D83 D84 − D13 − D14 ⎤⎡ ws−P f ⎤ ⎡ s1 ⎤ ⎥⎢ ⎥ ⎢ ⎥ ⎥ ⎢ w−Ps ⎥ ⎢ s p ⎥ ⎥⎢ s ⎥ ⎢ 2 ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎢ −SV ⎥ ⎢ s p ⎥ − D31 p − D32 p D33 p2 D34 p2 ⎥ ⎥ ⎢ ws ⎥ ⎢ 3 ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎥⎢ ⎥ ⎢ ⎥ − D41 p − D42 p D43 D44 ⎥ ⎢ ws−T M ⎥ ⎢ s4 ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎥⎢ ⎥=⎢ ⎥. D51 p D52 p − D53 p2 − D54 p2 ⎥ ⎢ −ws+P f ⎥ ⎢ s5 p ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎥ ⎢ −ws+Ps ⎥ ⎢ s6 ⎥ D61 p D62 p 0 0 ⎥⎢ ⎥ ⎢ ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎢ −ws+SV ⎥ ⎢ s7 ⎥ 0 0 D73 D74 ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎦⎣ ⎦ ⎣ ⎦ D81 p D82 p − D83 − D84 −ws+T M s8 D22 p D44 D12 p − D22 p D23 p2 D24 p2 (C1) Early EM waves 1305 The above equation can then be changed to ⎡ D11 D12 ⎢ ⎢D ⎢ 21 ⎢ ⎢D ⎢ 31 ⎢ ⎢ ⎢ D41 ⎢ ⎢ ⎢ D51 ⎢ ⎢ ⎢ D61 ⎢ ⎢ ⎢0 ⎢ ⎣ D81 D13 D14 D11 D12 − D13 − D14 D22 D23 p2 D24 p2 − D21 − D22 D23 p2 D24 p2 D32 D33 p2 D34 p − D31 − D32 D33 p2 D34 p2 D42 D43 − D41 D44 2 D54 p 2 D52 D53 p D51 D62 0 0 D61 0 D73 D74 0 D82 D83 D84 D81 − D42 D43 D44 − D53 p − D54 p2 2 D52 D62 0 D82 0 0 D73 D74 − D83 − D84 D ⎤⎡ ws−P f p ⎤ 1 (±i Mx z 2G + M yz ) ⎢ ⎢0 ⎢ ⎢ ⎢0 ⎢ ⎢ ⎢0 ⎢ ⎢ S ( p, ±1) = ⎢ ωp2 ⎢ 2 (∓Mzx ± Mx z ) + ⎢ ⎢ ⎢0 ⎢ ⎢ ⎢0 ⎢ ⎣ 0 s1 ⎤ ⎥⎢ ⎥ ⎢ ⎥ ⎥ ⎢ w−Ps p ⎥ ⎢ s p ⎥ ⎥⎢ s ⎥ ⎢ 2 ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎥ ⎢ w−SV ⎥ ⎢s p⎥ ⎥⎢ s ⎥ ⎢ 3 ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎥ ⎢ −T M ⎥ ⎢ ⎥ ⎥ ⎢ ws ⎥ ⎢ s4 ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎥⎢ ⎥=⎢ ⎥. ⎥ ⎢ −ws+P f p ⎥ ⎢ s5 p ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎥ ⎢ −ws+Ps p ⎥ ⎢ s6 ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎥ ⎢ −ws+SV ⎥ ⎢ s7 ⎥ ⎥⎢ ⎥ ⎢ ⎥ ⎦⎣ ⎦ ⎣ ⎦ −ws+T M s8 (C2) S According to eqs (15), (17) and (19), we get ⎡ ⎤ 0 ⎢ M ⎥ ⎢ ⎥ ⎢ H M−C 2 Mzz p ⎥ ⎢ ⎥ ⎢ −C Mzz p ⎥ ⎢ H M−C 2 ⎥ ⎢ ⎥ ⎢ iωp ⎥ 2G M ⎢ 2 (Mx x + M yy ) − iωp 1 − H M−C 2 Mzz ⎥ ⎢ ⎥ S ( p, 0) = ⎢ ⎥, ⎢0 ⎥ ⎢ ⎥ ⎢ ⎥ ⎢0 ⎥ ⎢ ⎥ ⎢ ⎥ ⎢0 ⎥ ⎢ ⎥ ⎣ ⎦ 0 ⎡ ⎡ (C3) ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥, iωp2 ⎥ (M − M ) zy yz 2 ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ (C4) T iωp ωp S ( p, ±2) = 0, 0, 0, − (Mx x − M yy ) ∓ (Mx y + M yx ), 0, 0, 0, 0 . 4 4 (C5) We rewrite eq. (A15) as ⎡ D41 p ⎢ ⎢ D51 ⎢ ⎢ ⎢ D61 ⎢ ⎣ D81 ε0 p D42 p D43 D44 D52 − D53 p D62 0 ⎤⎡ −pf w0 ⎤ ⎥ ⎢ − ps ⎥ ⎢ ⎥ − D54 p ⎥ ⎥ ⎢ w0 ⎥ ⎥⎢ ⎥ ⎥ ⎢ w−sv ⎥ 0 ⎥⎢ 0 ⎥ ⎦⎣ ⎦ μ0 D73 + ε0 D83 w0−em D82 ε0 p μ0 D73 + ε0 D83 ⎡ −D41 p − D42 p D43 ⎢ ⎢ D51 D52 D53 p ⎢ = −⎢ ⎢ D61 D62 0 ⎢ ⎣ D81 ε0 p D82 ε0 p μ0 D73 − ε0 D83 D44 ⎤⎡ +pf w0 ⎤ ⎥ ⎢ + ps ⎥ ⎥⎢w ⎥ ⎥⎢ 0 ⎥ ⎥⎢ ⎥ ⎥ ⎢ w+sv ⎥ . 0 ⎥⎢ 0 ⎥ ⎦⎣ ⎦ μ0 D73 − ε0 D83 w0+em D54 p (C6) 1306 Y. Gao et al. Left-multiplying both sides of eq. (C6) by Q2 = diag([1, p, p, 1]), we then get ⎤ ⎡ −pf ⎤ D41 D42 D43 D44 w0 p ⎥ ⎢ − ps ⎥ ⎢ 2 2 ⎢ ⎥ ⎢ D51 D52 − D53 p − D54 p ⎥ ⎥ ⎢ w0 p ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎢ −sv ⎥ ⎢ D61 D62 0 0 ⎥ ⎥ ⎢ w0 ⎥ ⎢ ⎦⎣ ⎦ ⎣ −em D81 ε0 D82 ε0 μ0 D73 + ε0 D83 μ0 D73 + ε0 D83 w0 d− ⎡ ⎤ ⎡ +pf ⎤ −D41 − D42 D43 D44 w0 p ⎢ ⎥ ⎢ + ps ⎥ 2 2 ⎢ D51 ⎥ ⎢ ⎥ D52 D53 p D54 p ⎢ ⎥ ⎢ w0 p ⎥ ⎢ ⎥ ⎢ ⎥ = −⎢ ⎥ ⎢ w+sv ⎥ . D62 0 0 ⎢ D61 ⎥⎢ 0 ⎥ ⎣ ⎦⎣ ⎦ D81 ε0 D82 ε0 μ0 D73 − ε0 D83 μ0 D73 − ε0 D83 w0+em ⎡ (C7) d+ For m = 0 and m = ±2, S ( p, 0) and S ( p, ±2) in eqs (C3) and (C5) are odd in p. Because the matrix D in eq. (C2) is even in p, ws+P f +P f and ws+Ps are even functions of p whereas ws+SV and ws+T M are odd functions of p. By using eq. (A14), we get that w0 and w0+Ps are even +SV +T M + are odd functions of p. Because d in eq. (C7) is even in p, the right side of eq. (C7) is odd in p. As functions of p whereas w0 and w0 −P f d− is also even in p, w0 and w0−Ps are then even in p, whereas w0−SV and w0−T M are odd in p. Subsequently, with eqs (A17) and (A18), we easily find that û 1 , Ê 1 and Ĥ2 are odd functions of p, whereas û z and Ê z are even functions of p for m = 0 and m = ±2, indicating û 1 (− p, 0) = −û 1 ( p, 0), (C8) Ê 1 (− p, 0) = − Ê 1 ( p, 0), (C9) ξ̂z (−k, 0) = ξ̂z (k, 0), (C10) û z (− p, 0) = û z ( p, 0), (C11) Ê z (− p, 0) = Ê z ( p, 0), (C12) û 1 (− p, ±2) = −û 1 ( p, ±2), (C13) Ê 1 (− p, ±2) = − Ê 1 ( p, ±2), (C14) Ĥ2 (− p, ±2) = − Ĥ2 ( p, ±2), (C15) û z (− p, ±2) = û z ( p, ±2), (C16) Ê z (− p, ±2) = Ê z ( p, ±2). (C17) For m = ±1, according to eq. (C4) we know S ( p, ±1) is an even function of p. Hence, by using eq. (C2) we find that ws+P f and ws+Ps are +P f odd functions of p whereas ws+SV and ws+T M are even functions of p. Then we get from eq. (A14) that w0 and w0+Ps are odd in p, whereas −P f +SV +T M −Ps are even in p. By applying eq. (C7) we get that w0 and w0 are odd functions of p, whereas w0−SV and w0−T M are even w0 and w0 functions of p. Subsequently, we obtain from eq. (A18) that û 1 , Ê 1 and Ĥ2 are even in p, whereas û z and Ê z are odd in p for m = ±1, indicating û 1 (− p, ±1) = û 1 ( p, ±1), (C18) Ê 1 (− p, ±1) = Ê 1 ( p, ±1), (C19) Ĥ2 (− p, ±1) = Ĥ2 ( p, ±1), (C20) û z (− p, ±1) = −û z ( p, ±1), (C21) Ê z (− p, ±1) = − Ê z ( p, ±1). (C22) For the SHTE system, we rewrite the source discontinuity vector shown in eqs (16), (18) and (20) as Early EM waves T iωp (Mx y − M yx ), 0, 0 , S H ( p, 0) = 0, 2 T Mx z ∓ M yz S H ( p, ±1) = , 0, 0, 0 , 2G T ωp iωp S H ( p, ±2) = 0, (Mx x − M yy ) + (Mx y + M yx ), 0, 0 . 4 4 1307 (C23) (C24) (C25) For m = 0 and m = ±2, we find that both S H ( p, 0) and S H ( p, ±2) are odd functions of p. From eq. (A24), we can find that ws+S H and ws+T E are odd in p because D H is even in p. According to eqs (A25) and (A26) we know that w0+S H ,w0+T E , w0−S H and w0−T E are all odd functions of p. By using eq. (A28), we find that û 2 , Ê 2 and Ĥ1 are odd in p, whereas Ĥz is even in p, indicating û 2 (− p, 0) = −û 2 ( p, 0), (C26) Ê 2 (− p, 0) = − Ê 2 ( p, 0), (C27) Ĥ1 (− p, 0) = − Ĥ1 ( p, 0), (C28) Ĥz (− p, 0) = Ĥz ( p, 0), (C29) û 2 (− p, ±2) = −û 2 ( p, ±2), (C30) Ê 2 (− p, ±2) = − Ê 2 ( p, ±2), (C31) Ĥ1 (− p, ±2) = − Ĥ1 ( p, ±2), (C32) Ĥz (− p, ±2) = Ĥz ( p, ±2). (C33) For m = ±1, S ( p, ±1) is an even function of p. We then find that u 2 , E 2 and H1 are even in p, whereas Hz is odd in p, that is H û 2 (− p, ±1) = û 2 ( p, ±1), (C34) Ê 2 (− p, ±1) = Ê 2 ( p, ±1), (C35) Ĥ1 (− p, ±1) = Ĥ1 ( p, ±1), (C36) Ĥz (− p, ±1) = − Ĥz ( p, ±1). (C37) Because k = ωp and in the present paper ω is set to be real, with ξ̂ denoting û, Ê and Ĥ, we finally have that for m = 0, ξ̂1 (−k, 0) = −ξ̂1 (k, 0), (C38) ξ̂2 (−k, 0) = −ξ̂2 (k, 0), (C39) ξ̂z (−k, 0) = ξ̂z (k, 0), (C40) for m = ±1, ξ̂1 (−k, ±1) = ξ̂1 (k, ±1), (C41) ξ̂2 (−k, ±1) = ξ̂2 (k, ±1), (C42) ξ̂z (−k, ±1) = −ξ̂z (k, ±1), (C43) and for m = ±2, ξ̂1 (−k, ±2) = −ξ̂1 (k, ±2), (C44) ξ̂2 (−k, ±2) = −ξ̂2 (k, ±2), (C45) ξ̂z (−k, ±2) = ξ̂z (k, ±2). (C46)