Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Elementary particle wikipedia , lookup
Aharonov–Bohm effect wikipedia , lookup
Diffraction wikipedia , lookup
Woodward effect wikipedia , lookup
History of subatomic physics wikipedia , lookup
Density of states wikipedia , lookup
Introduction to gauge theory wikipedia , lookup
Work (physics) wikipedia , lookup
Thomas Young (scientist) wikipedia , lookup
Equations of motion wikipedia , lookup
Time in physics wikipedia , lookup
Matter wave wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
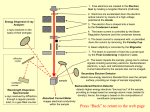
RF ELECTRON LINAC SHU-HONG WANG (王书鸿) Institute of High Energy Physics (IHEP) Yuquan Road 19, Beijing 100049, China E-mail: [email protected] RF Electron Linac is introduced in this lecture note, including the principles of acceleration, their basic features, main structures, pre-injector, longitudinal and transverse motions, and beam physics for a high current and high energy injector linac. 1. Introduction to RF Electron Linac 1.1. Properties of the RF Electron Linac Electrons can be resonantly accelerated, along an almost linear orbit, by an rf electric field. This accelerating facility is called RF Electron Linac. The rf accelerating field is either a traveling wave in loaded waveguides, or a standing wave in loaded cavities. RF electron linac has the following features, compared with other types of accelerator: ♦ It has no difficulties with the beam injection (into the linac) and ejection (from the linac ), compared with the circle / ring-type accelerators. ♦ It can accelerate electrons from low energy (a few tens keV) to very high energy (~ TeV), does not like dc high-voltage accelerator which has the dc voltage breakdown limitation, and does not like electron ring-type accelerator which has a beam energy loss limitation caused by the synchrotron radiation. ♦ It can provide a high current (or high intensity) beam with transverse focusing and longitudinal bunching. ♦ It can work at a pulsed mode with any duty factor, and / or at a CW mode. ♦ It can be designed, installed and commissioned section by section. ♦ It is mostly equipped by rf accelerating structures, not easy to be operated and maintained with high stability and reliability, and its construction and operation costs per unit beam power are expensive compared with circle / ring accelerators. 1.2. Applications of RF Electron Linac ♦ To be as injectors for synchrotrons, synchrotron radiation light sources and electron-positron colliders. ♦ Medical uses, such as radiotherapy and production of medical isotopes. ♦ Industrial irradiation for various materials and products. 1 ♦ Linac-based Free Electron Laser (FEL). ♦ Electron-positron linear colliders. 2. Elementary Principles of RF Electron Linac 2.1 Acceleration with RF Linac Assuming an rf electric-magnetic (EM) field travels in a uniform cylindrical waveguide, its fundamental mode TM01 has the EM components of longitudinal electric field E and azimuthal magnetic field B, as shown in Figure.1. Their distributions are analytically described with following expressions; Figure 1. EM field pattern of TM01 mode ' E z (r , z, t ) = E 0 J 0 (k c r )e jωt − k z , E r (r , z , t ) = jE 0 [1 − ( ' ω cr 2 1 / 2 ) ] J 1 (k c r )e jωt − k z , ω Eθ = 0 , (1) ' Bθ (r , z, t ) = jμ 0 E 0 J 1 (k c r )e jωt −k z , Br = B z = 0 . where J0 and J1 are zero-order and first-order Bessel functions, respectively; k c = ω cr / ω is the wave number, its frequency is the waveguide's cutoff frequency ω cr , and its p h a s e v e l o c i t y i s t h e v e l o c i t y o f l i g h t . T h e c u t o f f frequency for a given radius R of the waveguide can be obtained from the boundary condition of Ez (R) = 0, i. e the first root of J 0 (k c R) = 0 : Kc R = ω cr c 2 R = 2.405 (2) k ' = α + jk 0 , where α is the field attenuation factor due to the rf loss on a resistive wall; k 0 = ω vp is a wave number with frequency ω and phase velocity vp. Let us first consider the case of no power loss (ideal conductor, α = 0), then its propagation property (dispersive relation) is as follows: ω ω ω k 0 2 = ( ) 2 − k c 2 = ( ) 2 − ( cr ) 2 . c c c It describes the relations among kc, ω and k0 in J 0 (k c r )e j (ωt − k 0 z ) (3) , as shown in Figure 2. Figure 2 . Dispersion curve for a uniform waveguide For TM01-mode to exist in the waveguide, k 0 should be a real number, so that ω ≥ ω cr . This means that only the waves with ω ≥ ω cr can be propagated in the waveguide. But their phase velocity is vp = ω k0 = c 1 − (ω cr / ω ) 2 ≥c (4) Figure 3. Disk-loaded TW structure Obviously, these waves can not resonantly accelerate electrons. To have an accelerating structure in which the propagated waves have v p ≤ c , we must modify the structure to slow down the v p , for 3 instance, by introducing a periodic disk-loaded structure, as shown in Figure 3. Then the wave amplitude is periodically modulated: E z (r , z , t ) = E L c (r , z )e j (ωt − k0 z ) (5) where E L c (r , z ) is a periodic function with period d = Lc . This is Floquet theorem: at the same locations in different periods, the amplitudes of the propagated field are the same but their phases differ by a factor of e jk0 Lc . We can express E L c (r , z ) as a Fourier series in z : E Lc (r , z ) = ∞ ∑ n = −∞ E n J 0 ( k n r )e −j 2πn z Lc (6) where the coefficients E n J 0 (k n r ) are the solutions of the wave motion equation with cylindrical boundary condition, so that E z (r , z , t ) = ∞ ∑ n = −∞ E n J 0 (k n r )e j (ωt − kn z ) (7) where k n = k 0 + 2πn / Lc is the wave number of the n th space harmonic, which has the phase velocity of vnp = ω kn = ω k 0 (1 + 2πn / k 0 Lc ) ≤c (8) With above expressions we find that : ♦ A traveling wave consists of infinite space harmonic waves, as shown in Figure 4. ♦ Harmonic waves with n > 0 , propagating in the + z direction, are forward waves; those with n < 0 , propagating in the − z direction, are back waves. ♦ If each forward wave has the same amplitude and phase velocity as a back wave, then they form a standing wave. Therefore a method of analysis using space harmonic waves can be used to describe both standing waves and traveling waves. ♦ Because of the various space harmonic waves have different phase velocities, only one of the harmonic waves can be used to resonantly accelerate particles. The fundamental mode (n = 0) generally has the largest amplitude and hence is used for acceleration. 4 Figure 4. Brillouin diagram for a periodically loaded structure [5] ♦ When a TW is used to accelerate particles, a particle that “ rides ” on the wave at phase ϕ0 and moves along the axis has an energy gain per period ( Lc , cell length) of ΔW = e E0Lccosϕ0 where E0 is the field on axis, averaged over a period 1 E0 = Lc L ∫0 c E z (0, z )dz . (9) (10) ♦ Figure 4 also shows a second upper branch, which is one of an infinity of such high-order modes (HOMs), and intercepts the v p = c line. These modes are so-called wake fields, which can be excited by the transversely offset beam. 2.2 Essential Parameters of a TW Accelerating Structure 2.2.1 Shunt-Impedance Zs The shunt-impedance per unit length of the structure is defined as Zs = Ea 2 − dPw / dz (MΩ/m). (11) It expresses that, given the rf power loss per unit length, how high an electric field E a can be established on the axis. Since Pw ∝ Ea2 , therefore Z s is independent of E a and the power loss, depends only on the structure itself: its configuration, dimension, material and operating mode. 5 2.2.2 Quality Factor Q The unloaded quality factor of an accelerating structure is defined as Q= ωU − dPw / dz (12) where U is the stored energy per unit length of structure. The Q also describes the efficiency of the structure. With this definition one can see that, given the stored energy, the higher the Q , the less the rf loss; or given rf loss, the higher the Q , the higher the E a (since U ∝ E a2 ). 2.2.3 Zs/Q With the definitions of Z s and Q , we have Zs/Q = Ea2/ωU . (13) This defines that for establishing a required electric field E a , the minimum stored energy required. Obviously Z s / Q is independent of power loss in the structure. 2.2.4 Group Velocity vg It is the velocity of the field energy traveling along the waveguide, v g = Pw / U (14) where Pw is the power flow, defined by integrating the Poynting vector over a transverse plane within the inner diameter of the dick. For TM01-mode, Pw = ∫0a E r H ϑ 2πrdr here a is the iris radius, and for this mode, E r ∝ r and H θ ∝ r , so that v g ∝ a 4 . 2.2.4 Attenuation Constant We define τ 0 = ∫0Ls α ( z )dz 6 (15) as the attenuation constant, where α ( z ) is the attenuation per unit length of the structure, as mentioned in section 2.1. This is one of the most important parameters for TW structures, since it defines the ratio of output power to input power for an accelerating section (of length Ls ), and determines the power loss per unit length Pout = Pin e −2τ 0 and dPw Pin = (1 − e − 2τ 0 ) dz Ls (16) It is clear that, the larger the τ0, the smaller the output power, and hence the higher the rate of power use. On the other hand, a smaller τ0 gives a larger group velocity of the structure and thus a larger inner radius of the disk ( v g ∝ a 4 ) and a larger transverse acceptance. Finally, τ0 should be chosen by a compromise between these two effects. The residual output power is absorbed by a load installed at the end of the section, as shown in Figure. 5. (a) Disk-loaded TW Structure (b) SW Structure Figure 5. Power absorber at the end of a TW section 2.2.6 Working Frequency The working frequency is one of the basic parameters of the structure, since it affects on most of the other parameters according to the following scaling laws: Q ∝ f 0−1 / 2 , ♦ Shunt-impedance Z s ∝ f 01 / 2 , ♦ Quality Factor ♦ Total rf peak power Ptot ∝ f 0−1 / 2 , ♦ Minimum energy stored Z s / Q ∝ f 0 , ♦ RF energy stored U ∝ f 0−2 , ♦ Power filling time t F ∝ f 0−3 / 2 , ♦ Transverse dimension of structure a and b ∝ f 0−1 . The final choice of f 0 is usually made by adjusting all of the above factors and by considering the available rf source as well. Most electron linac work at a frequency of about 3000 MHz (S-band), e.g. 2856 MHz (λ ≈ 10.5 cm) for the SLAC linac and many others. 2.2.7 Operation Mode 7 Here we define the operation mode, which is specified by the rf phase difference between two adjacent accelerating cells. For instance 0-mode, π/2-mode, 2π/3 -mode and π-mode are the operation modes that have the phase differences of 0, π /2, 2π/3 and π, respectively, between two adjacent cells, as shown in Figure. 6. Figure 6. Operation modes For a disk-loaded TW structure the optimum operation mode is the 2π/3-mode, that has the highest shunt-impedance, as indicated in Figure. 7. Figure 7 Shunt-impedance vs. operation modes in TW structure [2] 3. Traveling Wave Accelerating Structure There is no firm rule with which to decide whether a traveling wave or a standing wave structure is to be chosen. However, traveling wave structure is usually used when dealing with short beam pulses and when particle velocities approach the velocity of light, as is the case with electrons. 8 3.1 Constant Impedance Structure With the definitions of structure parameters, the rf power distribution along the linac section is dPw ωP = − w = −2α 0 Pw dz Qv g where α0 is the attenuation per unit length of structure, α 0 = the (17) ω . If the structure is uniform along 2Qv g z axis, from the above equations, we have Ea 2 = ωZ s Qv g Pw dE a ωE a =− = −α 0 E a 2Qv g dz and For a uniform structure, α0=constant, E a ( z ) = E 0 e −α 0 z , and Pw ( z ) = P0 e −2α 0 z . Thus in a constant-impedance structure, E a (z ) and Pw (z ) are decrease along the At the end of a section with length L s : E a ( Ls ) = E 0 e −τ 0 where τ 0 = α 0 L s = ωL s 2Qv g z axis in a section. Pw ( Ls ) = P0 e −2τ 0 and (18) (19) is the section attenuation. The energy gain of an electron that "rides" on the crest of the accelerating wave and moves to the end of section is 1 − e −τ 0 . Using E 02 = 2Z sα 0 Pin ( Pin =input power), then ΔW = e ∫0Ls E a ( z )dz = eE0 Ls τ0 ΔW = e 2 Z s Pin Ls ⋅ ( 1 − e −τ 0 τ0 ) (20) For an optimized design of a constant impedance structure, we should maximize ΔW . Given Pin and L s we make Z s ⇒ maximum and ( 1 − e −τ 0 τ0 ) max ⇒ τ 0 = 1.26 (21) Given L s and Q , we can obtain the optimized group velocity v g . Obviously the smaller v g , the bigger τ0, and the bigger v g , the lower E 0 . An effective way to control v g is to adjust the inner radius a of the disk along the section. On the other hand, the power filling time of a waveguide is t F = Ls / v g = 2πτ 0 / ω . To decrease t F , then, τ0 should be < 1.26. 9 3.2 Constant Gradient Structure To keep E a = E 0 = constant along the structure, the structure is not made uniform, so that α0 = α0( z ). The question is how to determine α0( z ). Let us change the radii of the structure, a and b , to vary v g and to keep frequency constant along the section, also to keep the variations of Q and Z s along z so small that they can be neglected, then we have dPW / dz = −2α 0 ( z ) Pw and PLs = P0 e −2τ 0 where τ 0 = ∫0Ls α 0 ( z )dz is a section attenuation. Since E a2 = − Z s (22) dPw , to keep E a = constant, we dz need dPw / dz = const., so that PLs − P0 Pw ( z ) = P0 + Ls ⎡ 1 − e −2τ 0 z = P0 ⎢1 − Ls ⎣⎢ ⎤ z⎥ ⎦⎥ (23) Thus in a constant gradient structure, Pw should be linearly decreased along the structure. With dPW / dz = −2α 0 ( z ) PW and v g ( z ) = ω / 2Qα 0 ( z ) , we have α 0 ( z) = and v g ( z) = 1 ⋅ 2 Ls ωL s 1 − e −2τ 0 z 1− (1 − e − 2τ 0 ) Ls 1− ⋅ (24) z (1 − e − 2τ 0 ) Ls (25) 1 − e − 2τ 0 Thus in a constant gradient structure, the v g (z ) also decreases along the structure in the same way as Q PW (z ) . The energy gain for an on-crest particle is ΔW = e ∫0Ls E a ( z )dz = eE 0 Ls Since E 0 2 = − Z s dPLs dz = Z s P0 (1 − e − 2τ 0 ) , then Ls ΔW = e Z s P0 Ls (1 − e −2τ 0 ) (26) To have ΔWmax , we should have Z s ⇒ maximum and τ0⇒ maximum, all power should be lost in the structure. On the other hand we should also consider the filling time, t F = 2Qπ / ω , and τ0 should be chosen by a compromise among some effects. An example of a SLAC constant gradient structure 10 is shown in Figure 8. Each section is designed to be a tapered structure: 2b ≈ 8.4 to 8.2 cm, 2a ≈ 2.6 to 1.9 cm, v g / c ≈ 0.021 to 0.007, L s = 3.05 m, and Z s ≈ 57 MΩ/m. The advantages of the constant gradient structure are its uniform power loss and lower average peak surface field, thus most TW electron linacs are designed as constant gradient structures. Figure 8. Parameters of a SLAC constant gradient Structure [2] 4. Standing Wave Accelerating Structure 4.1 Standing wave for acceleration A direct and a reflected sinusoidal varying waves, traveling with the same velocity but in opposite directions, combine to create a standing wave (SW) pattern. If the amplitudes of the direct and reflected wave are A and B, respectively, the SW pattern has maximum A+B and minimum A-B, distant from each other by d = π / 2k 0 , with k 0 = ω / v p . The average amplitude of the SW pattern is A, hence the same as the direct traveling wave (TW). Such a SW pattern is not useful since the reflected wave only dissipates power traveling backwards and does not contribute to the acceleration of particles. However, SW accelerators use both the direct and reflected waves to accelerate particles. It can be understood from Figure 4: at the points where the direct and reflected space harmonics join, they have the same phase velocity, and if this velocity synchronous with the particle, both harmonics contribute to the acceleration. 11 From Figure.4 again, one finds that SW accelerators operate either at the lowest or highest frequency of the pass band, where k n L = Nπ , and N = 0,±1 . That means the operation modes in SW accelerators is either 0 or π . 4.2 Stabilized SW accelerating structure In addition to the high accelerating efficiency, the structure should have a high stability as well in the operation. 4.2.1 Properties of a structure with single-periodic chain A linac structure usually consists of a series period to provide a space harmonic wave that has phase velocity to be equal to the particle velocity for accelerating particles resonantly. In this case the structure has only one kind of period, or so-called single-periodic chain. It is known that in a cavity many "separated modes" can be excited, such as TM010, TM011,..TM01n and so on. They have different frequencies and amplitudes. On the other hand, in a single-periodic chain, many "operating mode" can be excited, that are defined by their phase shift between adjacent periods, such as 0, π/2, π-modes. These two kinds of modes are related to and different from each other. To simply study the properties of a single-periodic structure, an equivalent circuit is usually used. In this analytical way each period of the structure is described by an equivalent circuit with lumped parameter (L,C,R) and all periods in the structure are coupled each other with those lumped parameters. Assuming that a structure consists of N periods (cells) in the chain, and is terminated by an half cell at both ends. Each mode's frequency, amplitude and phase can be obtained by solving N+1 coupled equations. With the periodic property of the chain, the nth solution of these equations can be X n = An cos nϕ n , n = 0, 1, 2,...N (27) where An is a constant and ϕn is the phase shift between adjacent cells. For a SW structure, at the two ends of the chain we have X0 = XN, so that Nϕ = qπ , q = 0, 1, 2,....N. (28) Then the coupled equations have their solutions of Eigen function (field amplitude) X n q = A0 cos( 12 qnπ ) N (29) and Eigen value (frequency) ωq = ωa (30) 1 + k c cos(qπ / N ) where ωa is the resonant frequency in each cell. These equations describe the dispersion relation, by that one can see: ♦ If a chain consists of N+1 cells, then only N+1 modes can be excited in the chain. ♦ Each ωq corresponds a mode which has a phase shift of ϕ = qπ/N between adjacent cells. ♦ The number q for the modes of 0, π/2 and π-modes are 0, N/2 and N, respectively, and only when N is even, there is a π/2-mode in the chain. ♦ The band width of the chain is ωb=ωπ-ω0, as shown in Figure.9. Usually the coupling constant kc<< 1 (e.g 5%), then ωb ≈ kcωa, is proportional to kc. Figure 9. Band width and modes ♦ The mode separation between two adjacent modes is varied with mode's number. From (30), tt is easy to have the following expressions of the mode separations at 0-, π/2- and π - modes: ( Δω ωa ) 0,π = k cπ 2 4N 2 , and ( Δω ωa )π / 2 = k cπ 2N (31) Thus the biggest mode separation is at π/2-mode and it is proportional to kc/N2, while the smallest one is at 0- and π-modes dω ≈ 0 for 0 and ♦ The group velocity of each mode can be also easily obtained, for instance v g = dk dω π-modes, and v g = = ω a k c Lc / 2 for π/2-mode. Thus π/2 mode has the biggest group velocity dk 13 and hence the fastest energy propagation in the structure. This is very helpful to overcome the beam loading effect, particularly for high current beam acceleration. ♦ π-mode is located at the edge of the pass band. Both of the forward wave of n = 0 and its backward wave's harmonic wave of n = 1 make the contributions to accelerate particles, see Figure. 4, hence it has the highest shunt impedance compared with all other modes. On the contrary π/2-mode has the lowest shunt impedance, since all of its backward waves have the phase velocities in the opposite direction to particle's motion, so they do not make any contribution to the acceleration and just to be lost on the cavity wall. A brief summary of mode's comparison is listed in Table 1. Table 1. A brief summary of mode's comparison Effective shunt impedance π-modes π/2-mode maximum minimum Mode's separation minimum maximum Group velocity minimum maximum Field distortion by perturbation maximum minimum By Table 1, one can see that for a SW structure, 0-mode or π-mode has the highest shuntimpedance but the lowest group velocity, thus it has high accelerating efficiency but may not be stable in operation. On the other hand, the π /2-mode has the lowest shunt-impedance but the largest group velocity, and thus has lower accelerating efficiency but high operation stability. To have a structure with both high efficiency and high stability, the solution is to use a so-called biperiodic structure, which combines the advantages of π-mode and π/2-mode. 4.2.2 Properties of a biperiodic chain The purpose of introducing a biperiodic chain is to have an operation mode which can combine all advantages of π/2 and π-modes, and hence to form a very effective and very stable accelerating structure. Let us introduce a coupling periodic chain to the accelerating periodic chain and to form a biperiodic chain. By adjusting the coupling chain to make its pass band to be coupled resonantly with the accelerating pass band, so that at 0-mode or π-mode there is also a faster group velocity and a bigger mode separation, as shown in Figure. 10. The example of this kind of structure for electron linac is so called coupled-cavity linac (CCL). 4.3 Coupled-Cavity Linac (CCL) 14 The CCL is operated at π/2-mode of the biperiodic chain. In this structure, the couple element is also cavity-type. There are two types of CCL for the electron linac. One is onaxis-coupled structure, where each couple cavity is located on axis and between two accelerating cavities, as indicated in Figure 11 (b). Another one is so called side-coupled structure, as shown in Figure 11 (c) Figure 10. Resonantly coupling of accelerating passband with coupling passband Figure 11 π / 2 -mode operation of a cavity resonator chain.[3] 15 and in Figure 12, where each couple cavity is alternately located at the side of the accelerating cavity. The coupling factors for both on-axis-coupled and sidecoupled structures are adjusted by modifying the slot size between accelerating cavity and coupling cavity. In the side-coupled structure, the traveling ways for beam and for rf field are separated, so that both accelerating cavity and coupling cavity can be optimized independently from each other. Figure 12 Side-Coupled Cavity structure 5. Electron Pre-injector Linac As we have mentioned at the beginning of this lecture note that electron linacs are widely used as the injectors of synchrotrons, SR light sources and ring-type electron-positron colliders, linac based FEL, radiotherapy machines, and electron-positron linear colliders. All of these electron linacs should have the pre-injectors at the beginning, even though these pre-injectors are some different from each other for the various uses. However, they consist of most basic and common components of the electron linac. Figure 13 shows a schematic layout of an injector linac. Two types of electron pre-injector are commonly used: a dc high voltage gun with a bunching (velocity modulation) system (as shown in Figure 13), and an rf gun followed by a short accelerating structure. 16 Figure. 13 Schematic layout of an electron injector linac [5] The dc electron gun has a cathode (thermionic or photo-cathode) and an anode. It produces electrons with pulse lengths of 1 μs to several μs and a beam energy of 50 keV to 200 keV. If the gun uses a thermionic cathode, then a wire-mesh control grid is needed to form a beam pulse, which normally works at a voltage of about minus 50V with respect to the cathode. The cathode consists of some oxide and is heated to reduce the work function of electron emission. Beam dynamics in the gun is usually simulated with the EGUN code. Since the electrons from the gun have the velocities of v < c (e.g. ~ 0.5 c), the electron bunch can be shortened by using a bunching system that modulates the electron velocity with an rf field in the cavity or in the waveguide bunchers, followed by a drift space. The rf is phased with respect to electron beam such that the front electrons experience a decrease in energy and the back electrons experience an increase in energy. Beams can be bunched to about 100 of the fundamental frequency. The bunched beam is accelerated to about 20~50 MeV before the space charge effects can be neglected in these system. The first stage of bunching the beam from the dc high voltage gun is commonly accomplished by using SW single-cavity bunchers, followed by some TW bunchers for further bunching and acceleration. Usually the first few cells of the TW buncher have v p < c in order to synchronize with the beam. If the gun uses a photo-cathode, then the electrons are produced by the photo-electric effect, using a laser pulse incident on the cathode, and no grid in the gun. The rf gun is followed by an accelerating structure, since the electrons from the cathode are soon bunched by the rf field. The rf gun consists of one or more SW cavities with the cathode installed in the upstream wall of the first cavity. Compared with the dc gun, the rf gun has the advantage of quickly accelerating electrons to relativistic velocity (about 5 to 10 MeV), which avoids collective effects such as the space-charge effect and provides a shorter bunch length and lower beam emittance at the cathode. However, the rf gun has some time-dependent effects due to its time-dependent rf field, which may dilute the performance of electron bunches. 6. Longitudinal Motion 17 The principles of the longitudinal motion (described in this section) and the transverse motion (described in the next section) are almost the same both for electron linac and proton linac. However, since the static mass of proton is much heavier then electron (by a factor of about 1830), so that in the RF linacs, mostly β= v/c < 1 for protons and β=1 for electrons, and hence there are some differences between proton and electron in these motion., that will be mentioned somewhere in these sections. 6. 1 Stable Synchronous phase in Linacs In the linacs, the stable synchronous phase should be selected in a phase region where the electric field is rising with time, as shown in Figure 14. For high energy electrons (β=1), the longitudinal phase oscillation (any particle in a bunch to the reference particle or synchronous particle) is almost disappeared. One can put the beam bunch just on crest to have the maximum acceleration. However if electron bunch charge is high (e.g. > 1 nC) and bunch length is small, then the longitudinal wake field effect will induce an additional energy spread of the bunch (single bunch beam loading effect). To cure this effect, we have to select the bunch center off crest. Figure 14. Stable synchronous phase for linacs 6.2 Longitudinal Motion Equation The energy gain per cell for synchronous and non-synchronous particles are given as follows, respectively: δWs = eE 0TLc cosϕ s , and δW = eE 0TLc cosϕ (32) where T is so called time transit factor which will be talked about in the Proton Linac Chapter. For the TW accelerating structure, T = 1, and for the SW structure, T< 1. Assuming ΔW = δW − δWs is small that dΔW = eE 0T (cos ϕ − cos ϕ s ) dz (33) where ΔW = m0 c 2γ s3 β s Δβ , and Δβ = β − β s . Simultaneously, their phase difference and velocity difference per cell are given by follows, respectively: z − zs β 2 λ dΔϕ Δϕ = ϕ − ϕ s = − 2π , and Δβ = − s (34) β sλ 2π dz 18 Combining ΔW and Δϕ expressions, one can get longitudinal motion equation for non-synchronous particles: 2πeE0T 1 d dΔϕ ( β s3γ s3 )+ (cos ϕ − cos ϕ s ) = 0 (35) 3 3 dz dz m0 c 2 β s3γ s3 λ βsγ s ΔW dΔϕ = dz m0 c 2 So the longitudinal motion equation describes the non-synchronous particle’s motion in ( ΔW , Δϕ ) phase space. Since Δγ = γ − γ s = − λ 2π β s3γ s3 6.3 Stability of the Longitudinal Motion Assuming that the accelerating rate (per unit length) is so small that one can neglect its damping d (β sγ s ) , then the longitudinal motion equation can be simplified as: term dz d 2ϕ dz d( or then 2 + 2πeE 0T m0 c 2 β s3γ s3 λ (cos ϕ − cos ϕ s ) = 0 (36) 2πeE0T dϕ )=− (cos ϕ − cos ϕ s )dz dz m0 c 2 β s3γ s3 λ (37) using dz = dϕ dϕ / dz 2πeE 0T dϕ dϕ d( ) = − (cos ϕ − cos ϕ s )dϕ dz dz m0 c 2 β s3γ s3 λ by integrating above equation both sides, and considering dϕ 2π ΔW =− 3 3 dz β s γ s λ m0 c 2 we have c1Wk2 + c 2 (sin ϕ − ϕ cos ϕ s ) = H ϕ 2 eE T 2π ΔW . where c1 = 3 3 , c 2 = 0 2 , Wk = δγ = βsγ s λ m0 c m0 c 2 (38) The 1st term in left side of Equation (40) is a “kinetic energy”, and the 2nd is a “potential energy” of the motion, and the Hϕ in right side is an integration constant, or say Hamitonian. Hence Equation (40) describes the energy conservation of motion. That is Liouville’s theorem: in a motion system which can be described by a Hamitonian, the area surrounded by a phase trajectory is constant. The potential well and phase trajectory are shown in Figure 15. 19 Figure 15. Potential well and stable region of the longitudinal motion. By these figures, one can see that: π z Within − < ϕ s < 0 , there is a potential well, all particles in the well are steady oscillated 2 around the synchronous particle ( Ws , ϕ s ) and are steady accelerated along the structure. z The boundary of stable region is ϕ 2 < ϕ < −ϕ s where, ϕ 2 is a solution of H ϕ (ϕ 2 ) = H ϕ (−ϕ s ) . For a small angle oscillation, ϕ 2 ≈ 2 ϕ s , so that the width of stable region ≈ 3 ϕ s . z The phase boundary of stable region (so called “Separatrix”, “fish” or “bucket”) is described by c 2 [sin( −ϕ s ) − (−ϕ s ) cos ϕ s ] = H ϕ . z The energy boundary of stable region can be obtained by taking Wk ,max = ΔWmax m0 c 2 ⎡ 2eE 0Tβ s3γ s3 λ ⎤ =⎢ (ϕ s cos ϕ s − sin ϕ s )⎥ 2 ⎢⎣ πm0 c ⎥⎦ 6.4 Acceleration Effects 20 ϕ = ϕs , 1/ 2 (39) d ( β sγ s ) . If we now take it account into dz the motion equation, then one can find that the related phase trajectory is changed a little, but the phase area surround by this trajectory is still a constant. For the acceleration of very low-βparticles, if the variations of βs and γs in a cell are so large that can not be neglected, then this stable phase area is increased and hence the accelerator’s acceptance is improved. In this case the bucket’s boundary is changed from a “fish” to a “golf club”, as shown in figure 16. In above description we have ignored the damping term Figure 16 Stable boundaries (a) fish (ignoring acceleration) (b) golf club (including acceleration) 6.5 Small Angle Oscillation Expending cos ϕ ≈ cos ϕ s − (ϕ − ϕ s ) sin ϕ s − (ϕ − ϕ s )2 cos ϕ s, 2 and just taking its linear term for small angle oscillation, then the longitudinal motion is linearized as d 2 (Δϕ ) dz where k l2 = 2 + k l2 (Δϕ ) = 0 2πeE0T sin ϕ s m0 c 2 β s3γ s3 λ (40) is the phase oscillation wave number. 2π ≥ 10λ and f l ≤ 10% f rf . As β → 1 , kl the phase oscillation is going to be disappeared. For a small angle oscillation, one can easily get the phase damping law: The related phase oscillation period and frequency are Ll = Δϕ ∝ ( βγ ) −s 3 / 4 , and ΔW ∝ ( βγ ) 3s / 4 also as shown in Fig.17. 21 (41) Figure 17. Phase damping in small angle oscillation. 7. Transverse Motion 7.1 Field Distribution Near Axis of Structure In this section we discuss the transverse motion both for electron linac and proton linac with TW (waveguide, TM01-like mode) and SW (cavity, TM010-like mode), respectively. Since in the linacs, beam is accelerated along / near axis, hence the RF field distribution near the axis is the most interested. 1) Ez Expression Let us start with wave motion equation in cylindrical coordinate system: ∇ 2 E (r ) + k 2 E (r ) = 0 , ∇ 2 H (r ) + k 2 H (r ) = 0 and consider the axis-symmtry of TM01 and/or TM010 modes ∂E ∂2E = 0 , and = 0 , ( also for H ) ∂ϑ ∂ϑ 2 so that ∂ 2 Ez 1 ∂ ∂E z (r )+ + k 2 Ez = 0 r ∂r ∂r ∂z 2 moving the 2nd and 3rd terms to the right side, and integrating over r, we have ⎞ ∂E z 1 ⎛ ∂ 2 Ez + k 2 E z ⎟dr = − ∫ r⎜ 2 ⎜ ⎟ ∂r r ⎝ ∂z ⎠ Assuming the radius of the cylinder R, and expanding the field near axis, r << R, by r 2 ∂ 2 Ez E z (r , z , t ) = E z (0, z , t ) + ( ) r =0 + ........ 2 ∂r 2 ∂E z over r, and omit the terms above r3, we have then integrate ∂r 22 ∂E z r ⎡⎛ ∂ 2 E z = − ⎢⎜ ∂r 2 ⎢⎜⎝ ∂z 2 ⎣ ⎤ ⎞ ∂2Ez 1 ⎡⎛⎜ ∂ 2 E z ⎟ ⎢ = − + (k 2 E z ) r =0 ⎥ , and ⎟ 2 ⎢⎜⎝ ∂z 2 ⎥⎦ ∂r 2 ⎠ r =0 ⎣ ⎤ ⎞ ⎟ + (k 2 E z ) r =0 ⎥ ⎟ ⎥⎦ ⎠ r =0 so that E z (r , z , t ) = E z (0, z , t ) − r2 4 ⎡⎛ ∂ 2 E z ⎢⎜ ⎢⎣⎜⎝ ∂z 2 ⎤ ⎞ ⎟ + ( k 2 E z ) r =0 ⎥ ⎟ ⎥⎦ ⎠ r =0 (42) For a SW structure, the field distribution does not change with time except its amplitude, so one can separate the varieties of r, z, and t as E z (0, z , t ) = Ε z (0, t ) cos(ωt + ϕ 0 ) (43) where ϕ0 is the phase at t = 0. Assuming the structure is periodic with period of Lc, then according to the Flouqeut theorem, the field can be expressed by a periodic function: Ε z (0, z ) = ∞ ∑ −∞ An cos( 2πn z) Lc (44) Put (44) into (43) then E z (0, z , t ) = ∞ ∑ −∞ Bn cos(ωt − 2πn z + ϕ0 ) Lc (45) It means that the Ez field consists of a series of space harmonic waves, which have wave numbers and phase velocities, respectively, as follows: kn = 2πn ω , and v pn = Lc kn (46) Take a harmonic wave of n = 1, which has the phase velocity vp1 as the same as particle’s velocity v, then E z (0, z , t ) = B1 cos(ωt − 2πn z + ϕ0 ) Lc (47) For a synchronous acceleration with 0-mode, for instance, the phase velocity and the length of each accelerating period should be kept as: v p1 = ω 2π / Lc = Lc = v or Lc = vTrf = βλ Trf 23 (48) where the particle’s velocity variation within a period is assumed to be omitable.Above equation is so called resonant / synchronous accelerating condition. From E z (0, z , t ) expression mentioned above, one has ∂ 2 E z (0, z , t ) ∂z 2 = −( 2π 2 ) E z (0, z , t ) βλ ω 2π Put this equation into(44), and consider k 2 = ( ) 2 = ( ) 2 , then we have c λ ⎡ πr 2 ⎤ E z (r , z , t ) ≈ E z (0, z , t ) ⎢1 + ( ) (49) βγλ ⎥⎦ ⎣ To reduce the beam energy spread, one should take r ↓, λ↑, βγ↑. 2) Er Expression Similar with deduction of Ez expression, the Er expression can be deduced as π (50) Ε z (0, t ) sin(ωt + ϕ 0 ) βλ It shows that E r (r , z , t ) is increased linearly with r, but decreased with βλ. E r (r , z, t ) = −r 3) Hθ Expression Similarly, we can have πcε 0 Ε z (0, z ) sin(ωt + ϕ 0 ) (51) λ Hθand Er contribute the transverse forces to particle’s motion, their force’s ratio is −eμ 0 v z H ϑ = −β 2 H ϑ (r , z, t ) = −r eE r Since these two forces have different signs (+/-) from each other, hence the total transverse force is eπ (52) Fr = eE r − eμ 0 v z H ϑ = −(1 − β 2 )r Ε z (0, z ) sin(ωt + ϕ 0 ) βλ Obviously, when β→ 1, then Fr → 0. For a synchronous particle we take ωt + ϕ 0 = ϕ s , and − π 2 ≤ ϕ s < 0 for a stable longitudinal motion. Then we find that if β< 1, Fr> 0 , defocusing force. if β→1, Fr → 0. Therefore we have to introduce a focusing force into the linac, e.g. a series of quardrupole magnets to keep transverse motion to be stable. 24 7.2 Focusing Element and Transverse Motion Equation A typical transverse focusing element is a quadrupole (magnetic or electric). It produces the transverse forces (Lorentz forces) when a particle is in a quadrupole and offseted from longitudinal axis, as shown in Fig 18. In an ideal quadrupole field the pole tips have hyperbolic profiles and ∂B y ∂B . produce a constant transverse quadrupole gradient G = x = ∂x ∂y Figure 18 A quadrupole magnet cross section B0 . r0 For a particle moving along the z direction with velocity v and with transverse coordinates (x, y),the Lorentz force components are For a pole tipe with radius r0, and pole-tip field B0, then the gradient is G = Fx = −evG x , and F y = evG y If eG is positive, the quadrpole lens focuses in x and defocuses in y. The transverse motion equations (Hill’s Equations) of this particle in this lens are d 2x dz 2 + k 2 ( z ) x = 0 , and where k 2 ( z ) = eG ( z ) m0 cβγ d2y dz 2 − k 2 ( z) y = 0 (53) is so called focusing strength. Although individual lenses focus in only one plan ( say in x plan ), they can be combined (so called lattice) with both polarities to give overall strong focusing (Alternating Gradient Focusing , Periodic Focusing System) in both x and y plans, as shown in Figure 19. 25 Figure 19. FODO quadrupole lattice with accelerating gaps (or tubes) 7.3 Matrix Solution of Hill’s Equation A quadupole-transport (drift) channel can be described by the motion equation: x '' + K ( z ) x = 0 (54) 2 where x '' = d x , and K ( z ) = k 2 ( z ) . dz 2 if K = 0, drift motion ; K > 0, focusing; K < 0, defocuing. Above equation is a linear second-order differential equation, its solution can be given in matrix form: ⎡ x ⎤ ⎡ m11 ⎢ x ' ⎥ = ⎢m ⎣ ⎦ ⎣ 21 m12 ⎤ ⎡ x 0 ⎤ m 22 ⎥⎦ ⎢⎣ x 0' ⎥⎦ (55) (a) Drift space ( K = 0 ): ⎡1 l ⎤ M =⎢ ⎥ ⎣0 1⎦ where l = drift length (b) Focusing quadrupole ( K=eG/m0βγ> 0) ⎡ ⎢ cos K l M =⎢ ⎢⎣− K sin K l sin K l ⎤ ⎥ K ⎥ cos K l ⎥⎦ (c ) Defocusing quadrupole ( K=eG/m0βγ< 0) ⎡ sinh K l ⎤ ⎢ cosh K l ⎥ M =⎢ K ⎥ ⎢⎣ K sinh K l cosh K l ⎥⎦ (d) Thin lens: 26 A quadupole lens approaches its thin-lens approximation when Kl → 0 , while K l remains finite. Then we have ⎡ 1 M = ⎢± 1 ⎢ f ⎣ 0⎤ ⎥ 1⎥ ⎦ where f is the focal length, "+"---defocusing; "–" ---focusing and eGl 1 = Kl= f m0 cβγ The total transfer matrix through a sequence of constant elements is obtained by forming the product of the individual M matrices, such as: M = M n M n −1...., M 3 M 2 M 1 . 7.5 Courant-Snyder invariant As we have discussed that the transverse motion equations (Mathieu-Hill Equation) are: eG kx = x '' + K x ( z ) x = 0 m0 βγ eG y '' + K y ( z ) y = 0 ky = − m0 βγ Their solutions in a phase-amplitude form could be x( z ) = A β ( z ) cos(ψ ( z ) + δ ) x' ( z ) = − A β ( z) [α ( z ) cos(ψ ( z ) + δ + sin(ψ ( z ) + δ )] where A and δ are the constants of integration, and α ( z ) ≡ − The amplitude function, (or β - function), satisfies 2 ββ '' − β ' 2 +4 β 2 K x = 4 , (with phase advance of β ' ( z) 2 dψ 1 = ) dz β Let us introduce the Courant-Snyder invariant A 2 = γx 2 + 2αxx ' + βx '2 = constant. (58) 27 with γ = 1+α 2 β 7.6 Transfer Matrix Through One Focusing Period The transfer matrix M through one full period can be written: ⎡cos σ + α sin σ M (z → z + Lp ) = ⎢ ⎣ − γ sin σ β sin σ ⎤ cos σ − α sin σ ⎥⎦ (59) 1) Here σ is the phase advance per period of every particle, each lying on its own trajectory ellipse. If the focusing is either too strong or not enough, then the solution is unstable. The required condition for stability of the transverse motion is trM < 2 . Here “tr” is the trace of the M matrix. From above equation we find that the stability requirement corresponds to cos σ < 1 , or say 0 < σ < π . 2) Each particle’s motion in the linear system (only with linear forces) has an ellipse trajectory in phase space of ( x, x’ ) or ( y, y’ ), as shown in figure 25. This ellipse is described with three 1+α 2 independent parameters:ε(ellipse area), α and β(ellipse shape); with γ = . These parametersε, α, β and β(or γ ) are involved in above matrix M, and be called as Courant-Snyder parameters or Twiss parameters. The unit of ε: m.rad (or mm.mrad), The unit of β: m (or cm, mm ). The unit of γ: 1/m. α is dimensionless. Figure 25. An ellipse trajectory in phase space 7.7 Acceptance, Emittance and Beam Matching Accelerator’s Acceptance From (60) in (x, x’) plan, the maximum outer boundary of the phase space (ellipse, determined by the M matrix) is called as Acceptance, with its 28 x max = ra = Aβ max . (60) Here ra is the inner radius of accelerating tube, and A is the acceptance value of this accelerator: A= ra2 β max , and β max is determined by the focusing strength. Beam emittance Beam emittance is a beam projection in the phase space (say x and x’). In a linear system, the emittance has a shape of ellipse usually. The beam emittance (its area and shape) at each location along the linac axis is determined by both initial beam parameters and accelerator structures. The outer ellipse of the projection in the phase space is so called Beam Emittance, or say the beam emittance is defined to be the phase space (x, x') occupied by the beam: ε = γ b x 2 + 2α b xx ' + β b x ' 2 (61) Beam Matching If the injected beam’s ellipse is well matched to the focusing system, that means at the injection location every particle’s trajectory has the same orientation and same shape of the ellipse as the ones of acceptance (determined by the accelerator). If the injected beam is not matched with the accelerator acceptance, then the beam’s trajectories in the phase space will be changed from its original one to the new one which is determined by the accelerator. In this case the beam projection in the phase space or say its emittance will be enlarged, and may induces beam loss. Therefore, a beam matching to the accelerator at the injection location is very important to keep the beam quality. It is clear that a beam matching in the 4-dimentional transverse phase spaces (x, x', y, y') requires following 4 conditions: α bx = α ax , α by = α ay , β bx = β ax , β by = β ay hence one can adjust 4 quadrupoles’ gradient prior its injection into the accelerator’s periodic focusing system. If the beam is not matched, then the beam emittance will be enlarged by a factor of Bmag : ε 2 = Bmag ε 1 Bmag = α α ⎤ 1 ⎡ β1 β b + + β b β1 ( b + 1 ) 2 ⎥ ⎢ 2 ⎣ β b β1 β b β1 ⎦ (62) where α1 , β 1 designed lattice (acceptance) parameters at the injection position and α b , β b unmatched beam parameters at the injection position. It is convenient to express the equation of beam emittance in a matrix form as 29 X T σ −1 X = 1 [ ⎡x⎤ where X = ⎢ ' ⎥ , and X T = x ⎣x ⎦ σ −1 = (63) ] x ' is the transpose matrix; 1 ⎡γ α ⎤ ⎡ β −α⎤ and its inverse matrix is σ = ε ⎢ ⎥ ⎢ ⎥ ε ⎣α β ⎦ ⎣− α γ ⎦ By this expression of the emittance, for a well matched beam’s motion from location 1 to location 2 with transfer matrix of R, then its emittance at location 2 can be obtained by σ 2 = Rσ 1 R T . (64) It is worth to mention that for the beam transformation in a periodic focusing lattice, the phase advance σ per period Lp is related to the βfunction by Lp σ = ∫ 0 dz β( z ) (65) and the average βover the period is approximately β ≈ σ / L p . The βmax is usually located in the middle point of focusing quadrupole, and the βmin in the middle point of defocusing quadrupole. Normalized Emittanc If the emittance is defined in the phase space of ( x, Px ), where Px is the momentum of the beam in x-plan, then in the linear transformation of beam motion(including acceleration), the emittance (the phase space area occupied by the beam) is constant according to Liouville’s theorem. We call this emittance as normalized emittance. If the emittance is defined in the phase space of (x, x’ ), where x’= dx/dz then even in the linear transformation of beam motion(including acceleration), the emittance is not constant during acceleration, since x' ∝ Px / βγ . We call this emittance as un-normalized emittance, or simply emittance. 8. Beam physics of high energy / current electron injector linac Both factory type of e+e- colliders and the 3rd generation light sources need their injector linacs to have high energy (for full energy injection) and high current (for having high beam injection rate into rings) with small beam emittance and small energy energy spread. To have those high quality beams from the injector linacs, one has to consider some beam physics issues to overcome the possible beam performance dilutions caused by the high current. 8.1 Space charge effects on the low energy part of the injector 30 Let us consider two of many electrons in a bunch going on the same direction. There are two kinds of forces acting on each electron and caused by all other electrons in the bunch . One is the statistic electric force eE r according to the Coulomb law. Another one is the Lorenz force with the magnetic field Bθ caused by the moving electrons according to the Ampere law z F1 = eEr = e2 r ∫ n( r )dr ε 0r 0 e e 2 v 2 μ0 r F2 = − v × Bθ = − ∫ n( r )dr c cr 0 where n(r ) is the charge density distribution function. The total space charge force is z Fsc = e( Er − v Bθ ) = eEr (1 − β 2 ) = eEr / γ 2 c (66) So that if β < 1 , Fsc ≠ 0 ; and if β = 1 , Fsc = 0 . The longitudinal space charge effects will cause an additional beam energy spread and the transverse space charge force will cause a normalized emittance growth. For the beam coming from thermionic cathode electron gun which is commonly used for the injector linac, the beam energy (depending on the extract voltage between anode and cathode) is usually 80 keV ~ 200 keV, the related β = 0.413 ~ 0.659 , hence the space charge effects may be strong for the high current beam, e.g. for 10 A with 1 ns beam pulse (the pulse charge 10 nC/pulse). To partially cure these effects, a higher extract voltage of the gun is preferable. Here are some examples of simulated beam performances with different extract voltages by the EGUN and PARMELA codes. Figure 26 shows the normalized beam emittance variations along the pre-injector (consisting of an electron gun, an bunching system and an pre-accelerator up to about 30 MeV with optimized solenoid focusing field) for gun extract voltages of 80 kV, 120 kV and 200 kV. Some drupes of the emittance just downstream of the buncher are due to the beam loss in the bunching processes. From this figure one can see that the final normalized emittance at the exit of the pre-accelerator is about 3.5 πcm-mrad for 80 keV beam and less than 2.0πcm-mrad for 150 keV beam. Figure 28 shows the longitudinal bunch distribution in a beam pulse with different gun extract voltages. One can see by this figure that, if the gun extract voltage is high than 150 kV then a clean three bunches’ pattern can be obtained by the buncher (2856 MHz). It means that with this beam energy from the gun the longitudinal space charge effects can be well cured in the bunching processes. 31 Normalized emittance (cm.mrad) 4 3.5 3 2.5 2 1.5 1 0.5 0 120KV, Xrms 80KV,Xrms 150KV, Xrms Z 82 100 120 169 274 365 386 Location along the pre-injector(cm) Figure 26. Normalized beam emittance variation along the pre-injector a) 80 kV b) 120 kV c) 150 kV Figure 27. Bunched particle distribution in energy-phase space with different gun voltage 8.2 Wakefield effects As the beam current increasing the head particles in a bunch (or the upstream bunch in a bunch train) may produce the electric-magnetic fields in the structure, which travel in the structure following the head particles (or the upstream bunch). These fields are called to be single bunch wakefield (or multibunch wakefields) which act on the tail particles in a bunch (or on the downstream bunches) longitudinally and transversely and make the beam performance dilutions. Figure 28 shows the transverse wakefield effects when the bunch offset from the axis transversely. 32 Figure 28 Transverse wakefield effects Upper is single bunch effect and lower is the multi-bunch effect 8.2.1 Single bunch longitudinal effect The single bunch wake effect can be well described by a two-macroparticle model. The energy variation due to the single bunch longitudinal wake for head and tail macroparticles (each having charge of Ne/2 and separated by a distance d) respectively are dEh Ne2 =− W// (0) and 4 dz dEt Ne2 Ne2 =− W// (0) − W// ( d ) 4 2 dz (67) For the SLAC type accelerating structure (2856 MHz) and if with a bunch length of 3 mm, the calculated wake functions are W// (0) = 225V / pC / m and W// (3mm) = 57.4V / pC / m . Hence one can estimate the averaged bunch energy loss (beam loading) in the accelerating structures and the energy difference between head and tail macroparticles leading to the additional beam energy spread. To compensate the averaged bunch energy loss, one can apply a litter more RF power from the power source. While to compensate the bunch energy spread, one can put the bunch center off crest of the accelerating wave, so that the particles in the tail and head parts having higher and lower energy gain, respectively. 8.2.2 Multi-bunch longitudinal wake effect For multi-bunch dynamics only the fundamental accelerating mode (beam loading) is important, and for a constant gradient structure, the loaded accelerating gradient is dE dE0 W// ( s )Qbτ 1 − e −2τ ( − e − 2τ ) = − − 2τ 2 τ dz dz 1− e 33 (68) where Qb is the bunch charge, τ the attenuation of the structure and W// ( s ) the wake function at a distance of s. The long range wakefields can be specified in a simply form in which wakefields from one bunch to the next are presented by a point-like wake kick V/pC/m plus its first derivative in position s along the bunch. For the SLAC type S-band structure, if τ = 0.57 , Qb = 2.5nC and there are 3 bunches in 1 ns beam pulse with bunch spacing 10.5 cm, then we have W// (10.5cm) = 53.11V / pC / m and W// ( 21cm ) = 40.47V / pC / m To compensate the multi-bunch longitudinal wake effect, the simplest scheme is that the amplitude of the input rf field is linearly ramped during the bunch train injection in to the structure. One could adjust the timing of the bunch train, for example, let the 1st, the 2nd and the 3rd bunches enter the structures at 0.70 ns, 0.35 ns and 0 ns respectively, before the filling time of 0.83μs, so that the input RF field in the structure is ramped during the beam pulse and hence the most bunch to bunch energy variation in a short bunch may be compensated. The best timing can be defined by measuring each bunch’s energy with beam position monitor (BPM) installed at a downstream position where the dispersion is larger 8.2.3 Single bunch transverse wake effects By the two macroparticle model, if the initial bunch offset x0 at z = 0 , then at z = s , the tail particle’s further offset caused by the wake W⊥ (d ) of head particle is ⎡ Δx ⎤ Ne2W⊥ ( d ) = ×s ⎢ ⎥ 4kE ⎣ x0 ⎦ max where k is the quadrupole focusing strength. k ∝ magnetic gradient (69) Lq ∂B , with quadrupole effective length Lq , E ∂r ∂B and particle energy E. For the SLAC type structure, if the bunch length is 3 ∂r mm, then we have W⊥ (3mm ) = 3.4kV / pC / m 2 . To cure this effect the well known BNS damping can be employed. In this scheme, the accelerating phase of the bunch center is selected in the range of 0 < ϕ < π / 2 , so that the tail particle in the bunch will have its energy of less than the head particle. Since the focusing strength is inversely proportional to the beam energy, hence the tail particle will meet its stronger focusing than the head particle. The cost of using this scheme is a dilution of bunch energy spread. As we have seen from the formula (71), the single bunch transverse effect is inversely proportional to the bunch energy. Thus in the low energy part of the injector linac, one can employ the BNS damping scheme and then in the high energy part one can shift the accelerating phase of the bunch center to the normal range of −π / 2 < ϕ s < 0 so that the bunch energy spread can be damped soon after. 34 For the most injector linacs which are not long enough to employ the BNS damping scheme (only SLC-linac used), then an orbit correction scheme may be adopted to cure the single bunch transverse wakefield effect, together with controlling the misalignment of the accelerating structures. This scheme will be discussed in the later. 8.2.4 Multi-bunch transverse wake effects As it is well known, the multi-bunch transverse wake causes the cumulative BBU (Beam BreakUP) effect. Different from the single bunch BBU, its wake function W⊥ (d ) is dominated by one or a few resonators having large shunt-impedance r⊥n , ωnd r ω − ω d W⊥ ( d ) = ∑ ⊥ n n e 2 cQn sin( n ) . Q c n n (70) As the same as the long range longitudinal wake, the long range transverse wakefields from one bunch to the next can also be represented by a point-like wake kick V/pC/m2 plus its first derivative in position d along the bunch. By this simplification, for SLAC-type (2856 MHz, 10.5 cm wavelength) structure and if 3 bunches ina bunch train, one has W⊥ (10.5cm) = 2.064kV / pC / m 2 and W⊥ ( 21cm) = 0.548kV / pC / m 2 To cure this BBU effect except controlling the misalignment of the accelerating structures, an orbit correction scheme can be adopted. 8.3 Chromatic effect If a high current beam has a large energy spread in the low energy part of the linac, then a chromatic effect may be appeared in the quadrupole focusing system. Since the quadrupole focusing strength is inversely proportional to the particle’s energy ΔE ∂B 1 ∂B and Δk ∝ 2 E ∂r E ∂r giving the magnetic field gradient, hence the particles with different energies will meet the different focusing strength leading to an normalized emittance growth. To cure this effect, one may need to optimize the bunching processes to make the bunch energy spread as small as possible giving a high bunching efficiency, and may employ a high accelerating gradient to make the bunch energy increasing as rapid as possible. k∝ 8.4 Dispersive effect If the high current beam has an offset with respective to the quadrupole center, then the beam may be affected by a dipole component in the quadrupole system and make the particle’s trajectory further oscillated along the linac axis 35 ΔE i E where α is the dispersive function caused by the dipole component. In the low energy part of the linac usually the beam energy spread is not so small that the oscillation trajectories of particles with different energy could be separated leading to an effective emittance growth with respect to the linac axis. To cure this effect, one has to control the quadrupole misalignment and employ the beam orbit correction scheme. xi = α References 1. 2. Lapostolle and A. Septier, Eds., Linear Accelerators, North Holland and Wiley, 1970. G. A. Loew and R. Talman, Elementary principles of linear accelerators, AIP Conf. Proc. 105, 1983. 3. T. P. Wangler, Principles of RF Linear Accelerators, Jone Wiley & Sons, Inc. 1998. 4. D.H. Whittum, Introduction to Electrodynamics for Microwave Linear Accelerators, SLAC-PBU-7802, April 1998. 5. A. W. Chao and M. Tigner, Eds., Handbook of Accelerator Physics and Engineering, World Scientific Publishing Co., Inc., 1998. The relevant Sections in this Handbook are as follows: 1.6.10 G.A. Loew, Linear accelerator for electrons , p. 26. 2.4 H.G. Kirk, R. Miller and D. Yeremian, Electron gun and preinjector, p. 99. 7.3.5 G.A. Loew, Normal Conducting υp = c Linac Structures , p. 516. 6.7 Z.D. Farkas, RF Pulse Compression, p. 374. 7.1.1 A.D. Yeremian , R.H. Miller, Electron gun and preinjector, p. 419. 2.5.1 K. Thompson , K. Yokoya, Collective effect in high energy electron linacs, p. 103. 36