Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Newton's theorem of revolving orbits wikipedia , lookup
Routhian mechanics wikipedia , lookup
Atomic theory wikipedia , lookup
Modified Newtonian dynamics wikipedia , lookup
Specific impulse wikipedia , lookup
Mass in special relativity wikipedia , lookup
Classical central-force problem wikipedia , lookup
Work (physics) wikipedia , lookup
Relativistic angular momentum wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Equations of motion wikipedia , lookup
Electromagnetic mass wikipedia , lookup
Centripetal force wikipedia , lookup
Mass versus weight wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Seismometer wikipedia , lookup
Moment of inertia wikipedia , lookup
Chapter 8 Rigid Body Rotation: Axis Direction Fixed
Chapter 8 begins the discussion of rigid bodies, a system of particles with fixed relative
positions. Previously we have dealt with movement of a particle: if a rigid body does not
rotate it usually can just be treated by these earlier techniques. In Chapter 8 we discuss
only rotations about an axis of rotation that has a fixed orientation so that the rigid body
rotates in a fixed plane. We will define again the things you saw in University Physics,
center of mass, moment of inertia, Newton’s second law for rotation, angular momentum
for this situation. We will extend the ideas from that course.
After Chapter 8 we will jump to Chapter 10, but then return to Chapter 9 that discusses
rigid body rotation about a general axis. In that case the moment of inertia becomes a
tensor, angular momentum and angular velocity are not necessarily parallel, and we will
be able to discuss gyroscopes and tops.
1
Center of Mass of a Continuous Rigid Body
In Chapter 7 we defined the center of mass for a system of particles as
P
xi m i
xcm = P
mi
(1)
with similar expressions for y and z coordinates.
For a continuous body the summation becomes an integral and we can write
R
x dm
xcm = R
dm
(2)
where we envision the continuous object broken into small pieces of mass dm and coordinate
x. But how do we evaluate this integral? We must write dm in terms of space-variables,
and to do so we use the density and the volume. The density is a function of position,
ρ(x, y, z) and in Cartesian coordinates the volume is dv = dx dy dz. Then
R
R
R
ρ x dv
ρ y dv
ρ z dv
xcm = R
ycm = R
zcm = R
(3)
ρ dv
ρ dv
ρ dv
1
In practice there are several things we can do to make calculation simpler.
1. Look to see if an object can be considered as a combination of simpler objects: a
sledge hammer can be considered as a solid cylinder (the handle) with a second
cylinder (the head) mounted perpendicular to the first.
2. Look for symmetry. If there is a plane of symmetry, the center of mass must be
located on that plane. If there is an axis of symmetry the center of mass must be
located on that axis.
3. Look for ways to convert the 3D integral into a 2D or 1D integral.
Example Consider a planar half circle of radius R and uniform density. Locate the center
of mass.
Since the object is planar, the center of mass must lie in the plane. Also there is
an obvious symmetry line. Let’s call the symmetry axis y. The areal density is
2M
σ = M/( 21 πR2 ) = πR
2.
Consider a horizontal sliceplocated at a height y above the base and of height dy.
The width of the slice is 2 R2 − y 2 and this times dy is the area. Therefore
dm =
Hence
ycm =
1
M
Z
4M p 2
R − y 2 dy
πR2
R
y
0
4M p 2
4R
R − y 2 dy =
2
πR
3π
e.g. 1 Find the center of mass of a cylinder of radius r and length L.
e.g. 2 Find the center of mass of a uniform planar triangle with a base of w and a length
of `. Give answer measured from the tip.
e.g. 3 Suppose we make a strange hammer using a cylinder of mass m, radius r, and
length L, with a triangular head mounted at right angles to the cylinder with center
of base at center of cylinder end, mass 3m, base w and length `. Find the center of
mass
e.g. 4 Find the center of mass of a solid hemisphere of radius R, measured from the flat
base.
e.g. 5 Find the center of mass of a hemispherical shell of radius R, measured from the
flat base.
2
1.1
Numerical Integrals in Mathematica
In some cases a closed integral form is not practical. If you can write the integral, you can
use Mathematica (or Maple) to do the integral. For example, look at the Solid Cone of
Variable
p Density example in the text, the center of mass of a solid unit cone with density
ρ = x2 + y 2 . The first task is figuring out the limits of the integrals.
Once that is done, Mathematica can be used to evaluate the integral by typing
N Integrate[z Sqrt[x2 +y 2 ], {x, −1, 1}, {y, −Sqrt[1−x2 ], Sqrt[1−x2 ]}, {z, Sqrt[x2 +y 2 ], 1}]
Here the capital letters and form of the brackets, [ or {, must be used. This returns the
answer 0.418879.
For free you can go to http://integrals.wolfram.com/index.jsp to do integrals.
2
Kinetic Energy and Moment of Inertia: Rotation About
a Fixed Axis
Consider a flat object in the x-y plane (a laminar object) rotating about the z-axis, k̂,
perpendicular to the lamina. A point at location ~ri has a speed of vi = ri ω where ω is the
angular speed common to all points on the lamina. The angle between the position and
velocity vectors for a rigid object is always 90◦ .
As a vector equation ω
~ = ω k̂ and
~vi = ω
~ × ~ri
(4)
The system kinetic energy due to the rotation is (I could use integral signs and a differential
mass elements dm rather than summations)
Trot =
X1
2
mi vi2 =
1 X
mi ri2 ω 2
2
We define the moment of inertia about the z-axis to be
Z
X
X
Iz =
mi ri2 =
mi (x2i + yi2 ) = (x2 + y 2 ) dm
(5)
(6)
This is a constant for the object that depends on the choice of axis. It does not require a
laminar object. Then
1
Trot = Iz ω 2
(7)
2
3
Similarly we can compute the angular momentum about the axis of rotation and find
that
Z
Z
Lz = [~r × dm ~v ]z = ωr2 dm = Iz ω
(8)
Since we have
~
~ = dL
N
dt
(9)
we can write for a rigid object
Nz = Iz
dω
dt
(10)
~ will
CAVEAT: Once we get to Chapter 9 life is NOT this simple! I will be a tensor, and L
not be in the same direction as ω
~.
3
Calculating the Moment of Inertia for a Rigid Object
About a Fixed Axis
First let us define the word moment. A moment is a weighted sum (integral) of a quantity
multiplied by its position raised to some power. The center of mass is related to the first
moment of mass.
Z
X
1
First Moment =
m1 ri = r dm
(11)
We use the second moment
Second Moment =
X
m1 ri2 =
Z
r2 dm
(12)
to find the moment of inertia. To evaluate the integral, we express dm in terms of coordinates and density,
Z
Z
I = r2 dm = ρ r2 dv
(13)
e.g. 1 Find the moment of inertia for a thin uniform rod of mass m, length a about (a) an
axis at one end (b) an axis through its center of mass. The axis is perpendicular to
the rod. Note that unlike mass, the moment of inertia is dependent on the location
of the origin of the coordinate system.
e.g. 2 Find the moment of inertia of a ring of mass m, radius a about an axis through
center perpendicular to the plane of ring.
e.g. 3 Find the moment of inertia of a solid disk of mass m, radius a about an axis through
center perpendicular to the plane of disk.
4
e.g. 4 Find the moment of inertia of a solid cylinder of mass m, radius a, height L about
an axis through center perpendicular to the plane of end of the cylinder.
e.g. 5 Find the moment of inertia of a solid sphere of mass m, radius a, about an axis
through center.
3.1
Perpendicular Axis Theorem for Lamina
For a laminar object in the x-y plane (z = 0) rotating around the z-axis,
X
Iz =
mi (x2i + yi2 )
(14)
If we rotate the lamina around the x-axis instead, and use zi = 0,
X
Ix =
mi yi2
(15)
Therefore for a lamina
Iz = Ix + Iy
(16)
e.g. 1 Find the moment of inertia of a solid disk of radius a, mass m about an axis through
its diameter.
e.g. 2 Find the moment of inertia of a rectangular lamina of mass m and dimensions a, b
about an axis through the center of mass and perpendicular to the slab.
3.2
Parallel Axis Theorem
Consider an object rotating about a z-axis located arbitrarily. The distance from this axis
to a parallel axis passing through the center of mass will be denoted `.
Iz =
X
mi (x2i + yi2 ) =
X
mi (xic + xcm )2 + (yic + ycm )2
Expanding this out we will get 4 terms, two of which sum to 0, leaving
X
2
Iz = m`2 +
mi (x2ic + yic
)
(17)
(18)
e.g 1 Find the moment of inertia of a thin rod about one end by using the parallel axis
theorem.
e.g. 2 Find the moment of inertia of a pendulum consisting of a rod of length ` and mass
m1 attached to a disk of radius a and mass m2 . Assume that the center of the disk
is attached to the end of the rod. Use an axis at the far end of the rod.
e.g. 3 Find the moment of inertia of a solid cylinder of length b, radius a, mass m, rotating
about an axis through the center of mass but perpendicular to the rod.
5
3.3
Conservation of Energy With Rotation About a Fixed Axis
We include rotational kinetic energy in our expressions for the energy of a system, and
then providing that non-conservative forces do no work, Ti + Vi = T + V .
Example Suppose I have a solid sphere of radius a and mass m supported on an ideal
pivot (no friction) through a horizontal axis through its center of mass. A chain of
mass m/4 is wrapped around the top half (π radians) of the sphere almost perfectly
in balance, but the single link of the chain will start the sphere rotating. At the
instant the chain leaves the sphere, find the angular speed of the sphere. Assume
that the chain does not slip on the sphere.
The normal force at the pivot does no work, so we can use conservation of energy.
4
Radius of Gyration and the Physical Pendulum
All the moments of inertia that we have calculated can be summarized as
I = mk 2
(19)
where k has units of length. Thus for a rod pivoted around one end, k 2 = a2 /3, for a
sphere about an axis through a diameter, k 2 = 2a2 /5. The quantity k is called the radius
of gyration and depends on the geometry of the object and the location of the axis. Table
1 has values of k 2 . We will now look at the physical pendulum and get its period (small
angle oscillations first) in terms of the radius of gyration.
A rigid body rotates about an axis located a distance ` from the center of mass. The
gravitational torque is
~ = ~` × m~g
N
(20)
with magnitude
N = mg` sin θ
(21)
This is a restoring torque, so we can write Newton’s Law as
I ω̇ = −mg` sin θ
g`
θ̈ = − 2 sin θ
k
g`
0 = θ̈ + 2 sin θ
k
6
(22)
Table 1: Squares of Radius of Gyration for Some Objects
Body
Axis (through cm unless noted)
k2
Thin rod, length a
Normal to rod
a2
12
Normal to rod at end
a2
3
Parallel to b
a2
12
Rectangular lamina, a × b
Normal to lamina
a2 +b2
12
Plane of lamina
a2
4
Normal to lamina
a2
2
Plane of hoop
a2
2
Normal to hoop
a2
Thin cylindrical shell, radius a, length b
Longitudinal axis
a2
Solid cylinder, radius a, length b
Longitudinal axis
a2
2
Circular lamina, radius a
Laminar hoop, radius a
Normal to longitudinal axis
a2
4
+
b2
12
Thin spherical shell, radius a
A diameter
2 2
3a
Solid spherical shell, radius a
A diameter
2 2
5a
Rectangular parallelepiped, a × b × c
Normal to ab face
4.1
a2 +b2
12
Small Angle Oscillations
For small angle sin θ ≈ θ so we have
0 = θ̈ +
g`
θ
k2
(23)
with solution
θ = Θ0 cos(2πf0 t − δ)
where
r
2πf0 =
7
g`
k2
(24)
(25)
The phase constant, −δ, and amplitude, Θ0 , are determined by the initial conditions. The
period is
s
k2
T0 = 2π
(26)
g`
A simple pendulum consists of a small massive ball at the end of a string of length ` = L
of negligible mass so that k 2 = L2 and the period is
s
L
T0 = 2π
(27)
g
Hence a physical pendulum has the same period as a simple pendulum of length Lsp =
k 2 /`.
e.g. 1 A thin meterstick is pivoted about one end. What is the length of the equivalent
simple pendulum? We’ll check this out experimentally.
We can cast the parallel axis theorem in terms of the radius of gyration, with k and kcm
being the radii of gyration about a general axis and about an axis through the center of
mass respectively.
2
k 2 = kcm
+ `2
(28)
Thus
s
T0 = 2π
4.2
2 + `2 )
(kcm
g`
(29)
Measuring g: Kater’s pendulum
We can use pendula to determine g. Period can be measured accurately by measuring oscillations with an electronic timer for an extended period of time. Providing the amplitude
is small we might expect a timing accuracy of 0.01 s during a measurement of 500 s, or 2
parts in 105 .
If we employ a simple pendulum we need to measure its length precisely and trust that
it meets the criteria for a simple pendulum. The length measurement is less precise than
the time measurement since the string might stretch, and we need to have a hole in the
pendulum bob making the location of its center of mass more difficult to determine.
The same caveats apply to a physical pendulum, but more so. We need to measure the
distance from pivot to center of mass accurately, thus must have a very precise measure of
center of mass, and have the moment of inertia precisely determined. This is hard to do
to match the precision in timing.
8
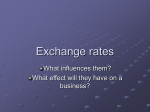
Figure 1: Kater’s pendulum from http://en.wikipedia.org/wiki/Kater’s pendulum. Knife
edges are points a. Parts b and c are the coarse and fine adjustments for the position of
the second mass.
Kater’s Pendulum is an approach that allows us to get very precise measurements of g
without having to measure/compute the center of mass or the moment of inertia.
A Kater’s Pendulum, http://en.wikipedia.org/wiki/Kater’s_pendulum, is a physical
pendulum that has at least one part adjustable in position. The pendulum has two knife
edges toward either end of the pendulum. When supported from knife edge 1 the distance
to the center of mass is `1 and the period is T1 . When supported from knife edge 2 the
distance to the center of mass is `2 and the period is T2 .
We can write the period using the radii of gyration and the parallel axis theorem,
2 + `2 )
(kcm
1
g`1
(k 2 + `22 )
= 4π 2 cm
g`2
T12 = 4π 2
T22
(30)
2 and equating the two to eliminate this variable, results
Rearrange these to solve for kcm
in
g
`1 T12 − `2 T22 = `21 − `22 = (`1 + `2 )(`1 − `2 )
(31)
2
4π
Rearranging
2(`1 T12 − `2 T22 )
8π 2
=
(32)
g
(`1 + `2 )(`1 − `2 )
Now express the numerator of the right side as
`1 T12 + `1 T12 − `2 T22 − `2 T22 + `2 T12 − `2 T12 + `1 T22 − `1 T22
(33)
And factoring terms this is
(`1 + `2 )(T12 − T22 ) + (`1 − `2 )(T12 + T22 )
(34)
8π 2
T 2 + T22 T12 − T22
= 1
+
g
`1 + `2
`1 − `2
(35)
and substituting back,
9
To get g from this we would still need the values of `1 and `2 , BUT if we now adjust the
movable mass so that T1 = T2 = T ,
8π 2
2T 2
=
g
`1 + `2
(36)
We have already discussed how to measure the period with precision, say 2 parts in 105 .
We can also measure knife edge to knife edge with precision by using a traveling microscope
for example and determine it to within 0.05 mm for a 500 mm separation or 1 part in 105 .
Thus combining the errors we can expect a precision of 3 parts in 105 !
Fowles and Cassiday refer to two axes on a physical pendulum that have identical periods
as centers of oscillation. This seems to be a non-standard term, I have found it in no other
texts, and Google returns results that say center of oscillation is synonymous with radius
of gyration.
4.3
Large Angle Oscillations and the Elliptic Integral
In the small angle approximation we have the period of oscillation of a physical pendulum
about an axis a distance ` from the center of mass is
s
k2
T0 = 2π
(37)
g`
To get the result for large angles we start with the energy equation, E = T + V . For
potential energy, V = mgh and we will choose h = 0 when the pendulum is in equilibrium.
When the pendulum is rotated through an angle θ, the center of mass rises a distance
h = `(1 − cos θ). When the pendulum reaches maximum angle θ0 it has no kinetic energy.
We can thus write
1 2
I θ̇ + mg`(1 − cos θ) = mg`(1 − cos θ0 )
(38)
2
With a little algebra this becomes
r
2g`
dθ
=
(cos θ − cos θ0 )
(39)
dt
k2
We choose t = 0 to be when θ = 0 and we can rearrange and integrate this equation to get
the time taken to reach an angle θ
s
Z θ
k2
dθ
√
t=
(40)
2g` 0
cos θ − cos θ0
10
It is convenient to introduce a change in variables here. Let
sin φ =
1
θ
sin
K
2
(41)
where K = sin θ20 . The text uses lower case k, but that can be confused with the radius
of gyration, so I will use capital K. With some work (guess what will be on next problem
set) the integral can be written
s
s
Z φ
k2
dφ
k2
p
≡
t=
F (K, φ)
(42)
2g` 0
2g`
1 − K 2 sin2 φ
and the F is the incomplete elliptic integral of the first kind. F must be compute numerically, and tables of values are available. An online calculation tool for elliptic integrals
is at http://keisan.casio.com/ and look in the Special Functions section (or search on
keisan casio elliptic). If you want an incomplete integral of the first kind at this site, you
must use arguments of k = sin(θ0 /2) and x = sin φ.
When we reach the amplitude θ0 , we have φ = π/2. The time from the above equation is
1/4 of the period, so we can write
s
s
Z π/2
k2
dφ
k2
p
T =4
≡4
F (K, π/2)
(43)
2g` 0
2g`
1 − K 2 sin2 φ
and this is called the complete elliptic integral of the first kind. It is denoted commonly as
K(k).
e.g. A physical pendulum is made from a solid sphere of diameter 32 cm and given the
amplitude of 120◦ . Find the period of the pendulum and compare to the result obtained
from the small angle approximation.
4.4
Elliptic Integrals of second and third kind
Other elliptic integrals exist and are used in other applications. The incomplete elliptic
integral of the second kind is
Z φq
E(K, φ) =
1 − K 2 sin2 φ dφ
(44)
0
The incomplete elliptic integral of the third kind is
Z φ
dφ
p
Π(K, n, φ) =
2
2
0 (1 + n sin φ) 1 − K 2 sin φ
In both of these, K < 1. For the third integral, n is an integer.
11
(45)
5
Laminar Motion of A Rigid Body
Thus far we have had an axis of rotation that was fixed, both in location and orientation.
We now move to laminar motion, such as a ball rolling down a ramp, where the axis of rotation remains fixed in orientation, but where the axis can move and even accelerate.
We start with the relation between torque and angular momentum in an inertial frame
~
dL
~
=N
dt
(46)
or
X
d X
~ri × mi~vi =
~ri × F~i
(47)
dt
Now suppose we evaluate the torques and angular momenta relative to a reference frame
O0 that is allowed to accelerate. Refer to Figure 8.5.1 to see
~ri = ~r0 + ~ri0
~vi = ~v0 + ~vi0
(48)
where ~r0 , ~v0 are the position and velocity of the non-inertial frame relative to the inertial
one. In the inertial frame we have Newton’s Second Law, F~i = d(mi~vi )/dt and hence can
calculate the torque relative to the non-inertial frame.
X
~ 0 =
N
~r10 × F~i
X
d
=
~ri0 × mi (~v0 + ~vi0 )
dt
X
d~v
X
d
0
+
=
mi~ri0 ×
~ri0 × mi~vi0
dt
dt
X
X
d
= −~v˙0 ×
mi~ri0 +
~ri0 × mi~vi0
(49)
dt
The time derivative can come out of the second term because in the chain rule (d~ri0 /dt) ×
~vi0 = 0. The summation in the second term is just the angular momentum evaluated about
O0 so we have
X
~0
dL
~ 0 = −~r¨0 ×
N
mi~ri0 +
(50)
dt
This is more complicated than Equation 46, but in three special cases the first term disappears.
1. The acceleration, ~r¨0 , of O0 is zero. This covers rotation about a fixed axis as well as
rotation about an axis having constant velocity.
12
2. O0 is at the center of mass. For O0 at the center of mass, by definition
This lets us write the non-inertial torque equation as
0
~ cm
dL
0
~ cm
~˙
N
=
= Icm ω
dt
P
mi~ri0 = 0.
(51)
3. O0 passes through the point of contact between a rolling object and the support, and
there is rolling without slipping.
~0
~ 0 0 = dLO0 = IO0 ω
N
~˙
(52)
O
dt
Note that the moments of inertia are different in these last two equations. If in doubt,
evaluate about the center of mass for the case of laminar motion.
NOTE: this discussion was for laminar motion. More general motion such as the rotation
of a top is much more complicated as we shall see in Chapter 9.
6
Examples of Laminar Motion
We will use Equations 51 or 52 and Newton’s Second Law,
F~ = m~¨rcm
(53)
to solve problems involving laminar rotation.
E.g. Body rolling on an inclined surface. Suppose a round object having mass m,
2 can roll down a surface inclined to the
radius a, and moment of inertia Icm = mkcm
horizontal by θ.
Choose a cartesian coordinate system with the x-axis parallel to the incline (See
Figure 8.6.1). The forces are the gravitational force, and the contact force between
the body and the surface which we conveniently decompose into normal and frictional
components.
Newton’s Laws then become
mẍcm = mg sin θ − FP
(54)
mÿcm = −mg cos θ + FN
(55)
We constrain the object to remain on the surface, hence ÿcm = 0 and FN = mg cos θ.
Using the Rotational Newton’s Second Law, Equation 51,
aFP = Icm ω̇
13
(56)
We have two equations, but three unknowns, the two accelerations ẍcm , ω̇ and the
frictional force FP . We have not yet used the constraint “rolling without slipping”.
Rolling Without Slipping If the coefficient of static friction is large enough, the
object will roll without slipping or skidding. The simple model of friction has
an inequality for static friction, FP ≤ µs FN , so we cannot calculte the frictional
force this way. However, in this case the x-velocity and angular velocity are
related
ẋcm = aω
(57)
ẍcm = aω̇
(58)
The rotational equation of motion becomes aFP = Icm x¨cm /a and this allows us
to eliminate FP in the translational equation of motion to yield
mẍcm = mg sin θ − m
2
kcm
ẍcm
a2
g sin θ
2 /a2
1 + kcm
ẍcm =
(59)
(60)
Since the acceleration is constant, this equation can easily be integrated to get
velocity and position as functions of time. Instead of choosing the center of
mass for O0 we could have chosen the point of contact. This is done as Example
8.6.1 in the text.
Knowing the acceleration ẍcm we can then determine the actual value of the
static frictional force.
Rolling and skidding If the object skids, the frictional force is a kinetic one, and
we can write FP = µk FN = µk mg cos θ.
The translational and rotational equations are
mẍcm = mg(sin θ − µk cos θ)
(61)
2
mkcm
ω̇ = mg(µk a cos θ)
(62)
Integrating these to get velocities,
ẋcm = g(sin θ − µ cos θ)t
µk a cos θ
ω = g
t
2
kcm
These are both proportional to time, so we define the ratio
2
ẋcm
kcm
tan θ
γ=
= 2
−1
aω
a
µk
14
(63)
(64)
(65)
We have γ ≥ 1 with γ = 1 being the case of rolling without slipping. Thus the
object will roll without slipping providing
µcrit =
tan θ
1 + (a/kcm )2
(66)
To get a feel for the solution, choose a solid ball of radius 25 cm on a board
inclined by 45◦ with coefficient of kinetic friction 0.20. We find a center of mass
acceleration of 5.54 m/s2 and an angular acceleration of 13.9 rad/s2 . You can
verify that the accelerations are NOT related by ẍ = aω̇.
A spinning billiard ball A solid billiard ball of radius a is initially spinning about a
horizontal axis with angular speed ω0 and zero center-of-mass velocity. The coefficient
of kinetic friction between the ball and the table is µk . How far does the ball travel
before it begins rolling without slipping?
The equations of motion are
ẍ = FP /m = µk g
µk ga
ω̇ = N/I = − 2
kcm
(67)
(68)
Integrate these once to get
ẋ = µk gt
(69)
µk ga
ω = ω0 − 2 t
kcm
(70)
Notice that the center of mass speed is increasing, while the angular speed is decreasing. At the critical point where slipping stops, tc , the relation ẋ = aω is true.
µk ga
µk gtc = a ω0 − 2 tc
(71)
kcm
Solve for time
aω0
tc =
µk g
1
1 + (a/kcm )2
(72)
and use this in the translational kinematics equation (with our initial conditions)
1
a2 ω02
xc = ẍt2c =
2
2µk g
1
1 + (a/kcm )2
2
(73)
Putting in some numbers, a = 2.8 cm, ω0 = 24 rad/s2 , and µk = 0.10, we find
t = 0.196 s and x = 1.88 cm.
15
Ladder on Smooth Surfaces A uniform ladder (think thin rod) of mass m and length
` is placed at an initial angle of θ0 from the horizontal against a smooth wall—the
floor is also smooth. There being no friction, the ladder will begin to move. At what
angle will the ladder leave the wall?
The forces on the ladder are the weight, −mg ĵ, and normal forces at the wall and
floor, FN 2 î, FN 1 ĵ. We can write the translational equations of motion as
mẍcm = FN 2
(74)
mÿcm = FN 1 − mg
(75)
For an arbitrary angle θ the center of mass is located at xcm = ` cos θ/2, ycm =
` sin θ/2. Taking derivatives
`
ẋcm = − sin θ θ̇
2
`
`
ẍcm = − sin θ θ̈ − cos θ θ̇2
2
2
`
ycm
˙
=
cos θ θ̇
2
`
`
ÿcm =
cos θ θ̈ − sin θ θ̇2
2
2
(76)
(77)
(78)
(79)
Writing the energy equation
1
1
mv 2 + Icm θ̇2 + mgycm = mgy0,cm
2 cm 2
(80)
2 = ẋ2 + ẏ 2 = `2 θ̇ 2 /4, and using
We can get the center of mass velocity from vcm
cm
cm
2
Icm = m` /12 and expressing all variables in terms of θ the energy equation can be
manipulated to
r
3g
θ̇ =
(sin θ0 − sin θ)
(81)
`
Take the time derivative to get
1 3g
` (− cos θ)θ̇
θ̈ = q 2
3g
` (sin θ0
− sin θ)
=−
3g
cos θ
2`
(82)
Put the expressions for θ̇, θ̈ into Equations 77 and 74,
3mg
sin θ cos θ
3mg
3
FN 2 = −
−
+ cos θ sin θ0 − sin θ cos θ = −
cos θ sin θ0 − sin θ
2
2
2
2
(83)
16
The ladder loses contact with the wall when the normal force FN 2 is zero, or
sin θ =
2
sin θ0
3
(84)
For a specific case, if θ0 = 75◦ then θ = 40◦ . It is instructive to determine the normal
force from the ground at the point the ladder leaves.
7
Rotational Impulse and Collisions
Earlier we defined linear impulse (P in our text) on an object,
Z
~
~
J ≡ P = F~ dt
(85)
and the net impulse equals the change in momentum.
P~ = m~v 0 − m~v
(86)
Similarly we can define the rotational impulse
Z
~
~ dt
Prot = N
(87)
and for the case of laminar rotation
Prot = Iω 0 − Iω
(88)
If the linear impulse is applied so that its line of action is a distance ` from the reference
axis, then
Prot = P `
(89)
Eight Ball in the Corner Pocket What must be the height of the bumper on a pool
table to allow balls to elastically bounce off the bumper without skidding?
Call the radius of the ball a and the height of the bumper h. The ball has an initial
velocity v î and a final velocity v 0 î. A horizontal impulse P î is supplied by the
bumper. Applying linear and rotational Impulse Momentum Theorems,
P
= mv 0 − mv
(90)
0
(91)
P (h − a) = Iω − Iω
The no-skid conditions require
v = aω
v
0
17
= aω
(92)
0
(93)
Combining,
P + mv = mv 0 = maω 0
P (h − a)
P + maω = ma
+ω
I
ma(h − a)
P = P
I
2ma2
= ma(h − a)
5
7
a
h =
5
(94)
(95)
(96)
(97)
(98)
In other words, the bumper height must be 7/10 of the diameter of the ball. Check
it out!
Center of Percussion Consider a baseball bat, mass M , suspended so that it is free to
move. A ball, mass m, strikes the bat at some point. What are the subsequent
motions of the bat and the ball?
Refer to figure 8.7.1. If the ball initially moves to the right along the x-axis, it
bounces off and moves at a different velocity in the −x-axis. The motion of the bat
is more complicated, being a combination of translation and rotation.
If the ball strikes the bat at its center of mass, the bat will end up in pure translation.
Is it possible to find a location so that some point on the bat has no translational
velocity?
There is an impulse P~ between ball and bat. We can write
P~
−P~
= M~vcm
= m~v1 − m~v0
(99)
(100)
From rotational impulse we can write for the bat,
ω−0=
P `0
Icm
(101)
where `0 is the distance from the center of mass to the impact point. We can write the
velocity of another point a distance ` from the center of mass as
P
P `0
1
``0
−
`=P
−
(102)
vO = vcm − `ω =
M
Icm
M
Icm
This velocity can be zero providing
``0 =
Icm
M
18
(103)
So if we know where we hold the bat, O, and the distance to the center of mass, `, the
center of percussion is located at `0 from the center of mass or ` + `0 from where we are
holding the bat.
19