Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Fictitious force wikipedia , lookup
Weightlessness wikipedia , lookup
Electromagnetism wikipedia , lookup
Static electricity wikipedia , lookup
Centrifugal force wikipedia , lookup
Friction-plate electromagnetic couplings wikipedia , lookup
Lorentz force wikipedia , lookup
Centripetal force wikipedia , lookup
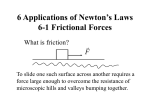
Chap. 8 Friction Chapter Outline Characteristics of Dry Friction Problems Involving Dry Friction Wedges Frictional Forces on Screws Frictional Forces on Flat Belts Frictional Forces on Collar Bearings, Pivot Bearings, and Disks Frictional Forces on Journal Bearings Rolling Resistance 8-1-2 APPLICATIONS In designing a brake system for a bicycle, car, or any other vehicle, it is important to understand the frictional forces involved. For an applied force on the brake pads, how can we determine the magnitude and direction of the resulting friction force? 8-1-3 APPLICATIONS (continued) Consider pushing a box as shown here. How can you determine if it will slide, tilt, or stay in static equilibrium? What physical factors affect the answer to this question? 8-1-4 CHARACTERISTICS OF DRY FRICTION (Section 8.1) Friction is defined as a force of resistance acting on a body which prevents or retards slipping of the body relative to a second body. Experiments show that frictional forces act tangent (parallel) to the contacting surface in a direction opposing the relative motion or tendency for motion. For the body shown in the figure to be in equilibrium, the following must be true: F = P, N = W, and Wx = Ph. 8-1-5 CHARACTERISTICS OF FRICTION (continued) To study the characteristics of the friction force F, let us assume that tipping does not occur (i.e., “h” is small or “a” is large). Then we gradually increase the magnitude of the force P. Typically, experiments show that the friction force F varies with P, as shown in the left figure above. 8-1-6 FRICTION CHARACERISTICS (continued) The maximum friction force is attained just before the block begins to move (a situation that is called “impending motion”). The value of the force is found using Fs = μs N, where μs is called the coefficient of static friction. The value of μs depends on the materials in contact. 8-1-7 Once the block begins to move, the frictional force typically drops and is given by Fk = μk N. The value of μk (coefficient of kinetic friction) is less than μs . • μk are typically 25% smaller than s Contact Materials Coefficient of Static Friction μs Metal on ice 0.03 – 0.05 Wood on wood 0.30 – 0.70 Leather on wood 0.20 – 0.50 Leather on metal 0.30 – 0.60 Aluminum on aluminum 1.10 – 1.70 8-1-8 DETERMING μs EXPERIMENTALLY A block with weight w is placed on an inclined plane. The plane is slowly tilted until the block just begins to slip. The inclination, θs, is noted. Analysis of the block just before it begins to move gives (using Fs = μs N): + ∑ Fy = N – W cos θs = 0 + ∑ FX = μS N – W sin θs = 0 Using these two equations, we get μs = (W sin θs ) / (W cos θs ) = tan θs This simple experiment allows us to find the μS between two materials in contact. 8-1-9 PROCEDURE FOR ANALYSIS (Section 8.2) Steps for solving equilibrium problems involving dry friction: 1. Draw the necessary free body diagrams. Make sure that you show the friction force in the correct direction (it always opposes the motion or impending motion). 2. Determine the number of unknowns. Do not assume F = μS N unless the impending motion condition is given. 3. Apply the equations of equilibrium and appropriate frictional equations to solve for the unknowns. 8-1-10 IMPENDING TIPPING versus SLIPPING For a given W and h, how can we determine if the block will slide first or tip first? In this case, we have four unknowns (F, N, x, and P) and only three EofE. Hence, we have to make an assumption to give us another equation. Then we can solve for the unknowns using the three EofE. Finally, we need to check if our assumption was correct. 8-1-11 IMPENDING TIPPING versus SLIPPING (continued) Assume: Slipping occurs Known: F = μs N Solve: x, P, and N Check: 0 ≤ x ≤ b/2 Or Assume: Tipping occurs Known: x = b/2 Solve: P, N, and F Check: F ≤ μs N 8-1-12 Characteristics of Dry Friction Angle of Friction 靜摩擦角 FS ) N −1 μ S N = tan ( ) N = tan −1 μ S φs = tan −1 ( 動摩擦角 Fk ) N μk N φk = tan −1 ( = tan −1 ( N = tan −1 μ k ) ΦS ≥ ΦK 8-1-13 Characteristics of Dry Friction Angle of Repose 安息角 N = W cos θ S FS = W sin θ S = μS N = μ S (W cos θ S ) ∴θ S = tan −1 μ S 安息角 = 靜摩擦角 8-1-14 Problems Involving Dry Friction Equilibrium Impending Motion at All Points 8-1-15 Problems Involving Dry Friction Tipping or Impending Motion at Some Points , Ph Ph = wx x = w Impending Motion 0 ≤ x ≤ b/2 (F = μ S N ) Tipping x=b/2 (F ≤ μ S N ) h= 一、p增大,x也會增大而往外移 二、h增大,P、F形成的couple增大、x增大 當 wx P x= b 2 h = hmax 8-1-16 Example 8.1 The uniform crate has a mass of 20kg. If a force P = 80N is applied on to the crate, determine if it remains in equilibrium. The coefficient of static friction is = 0.3. 8-1-17 Solution Resultant normal force NC act a distance x from the crate’s center line in order to counteract the tipping effect caused by P. 3 unknowns to be determined by 3 equations of equilibrium. 8-1-18 Solution + → ∑ Fx = 0; 80 cos 30o N − F = 0 + ↑ ∑ Fy = 0; − 80 sin 30o N + N C − 196.2 N = 0 ∑ M O = 0; 80 sin 30o N (0.4m) − 80 cos 30o N (0.2m) + N C ( x) = 0 F = 69.3 N , N C = 236 N x = −0.00908m = −9.08mm Solving 8-1-19 Solution Since x is negative, the resultant force acts (slightly) to the left of the crate’s center line. No tipping will occur since x ≤ 0.4m Max frictional force which can be developed at the surface of contact Fmax = sNC = 0.3(236N) = 70.8N 8-1-20 p. 401, 8-8 The uniform pole has a weight of 150 N and a length of 7.8 m. Determine the maximum distance d it can be placed from the smooth wall and not slip. The coefficient of static friction between the floor and the pole is μs = 0.3. 8-1-21 p. 403, 8-15 The spool has a mass of 200 kg and rests against the wall and on the floor. If the coefficient of static friction at B is (μs)B = 0.3, the coefficient of kinetic friction is (μK)B = 0.2, and the wall is smooth, determine the friction force developed at B when the vertical force applied to the cable is P = 800 N. 8-1-22 p. 405, 8-28 Determine the minimum force P needed to push the two 75-kg cylinders up the incline. The force acts parallel to the plane and the coefficients of static friction of the contacting surfaces are μA = 0.3, μB = 0.25, , and μC = 0.4. Each cylinder has a radius of 150 mm. 8-1-23 8-1-24 8-1-25 p. 408, 8-45 The 45-kg disk rests on the surface for which the coefficient of static friction is μA = 0.2. Determine the largest couple moment M that can be applied to the bar without causing motion. 8-1-26 8-1-27 p. 410, 8-60 If θ =15°, determine the minimum coefficient of static friction between the collars A and B and the rod required for the system to remain in equilibrium, regardless of the weight of cylinder D. Links AC and BC have negligible weight and are connected together at C by a pin. 8-1-28 8-1-29 Wedges (楔) 抬重物省力的工具 若P=0,則摩擦力會使Block(A)靜止稱為self-locking 8-2-1 Screws An inclined plane or wedge wrapped around a cylinder lead l, lead angle θ M = P⋅L = s⋅r 8-2-2 Screws 上移 M PL = r r W , S , R三力平衡 止滑 S= 自動鬆開 必須加外力才不會下滑 使轉開 鎖住,必須加力才可鬆開 8-2-3 p.418, Problem 8-72 The wedge blocks are used to hold the specimen in a tension testing machine. Determine the largest design angle θ of the wedges so that the specimen will not slip regardless of the applied load. The coefficients of static friction are μ A = 0.1 at A and μ B = 0.6 at B. Neglect the weight of the blocks. 8-2-4 8-2-5 p.420, Problem 8-84 The clamp provides pressure from several directions on the edges of the board. If the square-threaded screw has a lead of 3 mm, mean radius of 10 mm, and the coefficient of static friction is μ S = 0.4, determine the horizontal force developed on the board at A and the vertical forces developed at B and C if a torque of M = 1.5 N⋅m is applied to the handle to tighten it further. The blocks at B and C are pin connected to the board. 8-2-6 8-2-7 Flat Belts dθ dθ + μdN − (T + dT ) cos = 0...........(1) 2 2 dθ dθ ΣFy = 0 : dN − (T + dT ) sin − T sin = 0...............(2) 2 2 ΣFX = 0 : T cos 又dT ⋅ sin dθ dθ dθ dθ → 0, sin → , cos →1 2 2 2 2 由(1) ⇒ μdN = dT 由(2) ⇒ dN = Tdθ dT = μdθ 相除 ⇒ T β T2 dT = μ ∫ dθ 積分 ⇒ ∫ 0 T1 T T ⇒ ln 2 = μβ T1 ⇒ T2 = T1 ⋅ e μβ β以弳度 (radian)表示 8-2-8 p.424, 8-92. The boat has a weight of 2500 N ( 250 kg) and is held in position off the side of a ship by the spars at A and B. A man having a weight of 650 N ( 65 kg) gets in the boat, wraps a rope around an overhead boom at C, and ties it to the end of the boat as shown. If the boat is disconnected from the spars, determine the minimum number of half turns the rope must make around the boom so that the boat can be safely lowered into the water at constant velocity. Also, what is the normal force between the boat and the man? The coefficient of kinetic friction between the rope and the boom is μs = 0.15. Hint: The problem requires that the normal force between the man’s feet and the boat be as small as possible. 8-2-9 8-2-10 p.427, 8-108. Determine the maximum number of 25-kg packages that can be placed on the belt without causing the belt to slip at the drive wheel A which is rotating with a constant angular velocity. Wheel B is free to rotate. Also, find the corresponding torsional moment M that must be supplied to wheel A. The conveyor belt is pre-tensioned with the 1500-N horizontal force. The coefficient of kinetic friction between the belt and platform P is μK = 0.2, and the coefficient of static friction between the belt and the rim of each wheel is μs = 0.35. 8-2-11 Bearings and Disks p= P π ( R2 2 − R1 2 ) dF = μ S dN = μ S pdA = μS P π ( R2 − R1 ) 2 2 dA dA = rdrdθ ΣM Z = 0 : M − ∫ A rdF = 0 ∴M = ∫ R2 2π ∫ R1 0 r[ μS P π ( R2 − R1 ) 2 2 ](rdrdθ ) = μS P π ( R2 − R1 2 2 )∫ R2 R1 2π r dr ∫ dθ 2 0 ⎛ R2 3 − R1 3 ⎞ 2 ⎟ ∴ M = μ S P⎜⎜ 2 2 ⎟ 3 ⎝ R2 − R1 ⎠ For pivot bearing : R 2 = R,R1 = 0 2 ⇒ M = μ S PR 3 8-2-12 Journal Bearings r sin φk = rf Σ M Z = 0 : − M + ( R sin φ k ) r = 0 ⇒ M = Rr sin φ k 若 μ k 很小,則 μ k = tan φ k ≈ sin φ k ≈ φ k ⇒ M ≈ Rr μ k ≈ Rr f 8-2-13 Rolling Resistance Wa=P(r cosθ ) ⇒ Wa ≈ Pr Wa P≈ r a:滾動摩擦係數 1 8-2-14 p.443, 8-102. 8-2-15 p.446, 8-117. 8-2-16 8-2-17