Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Riemannian connection on a surface wikipedia , lookup
Metric tensor wikipedia , lookup
Wave–particle duality wikipedia , lookup
Cartesian coordinate system wikipedia , lookup
Cartesian tensor wikipedia , lookup
Covariance and contravariance of vectors wikipedia , lookup
Event symmetry wikipedia , lookup
Lorentz transformation wikipedia , lookup
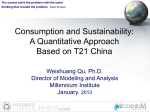
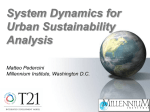
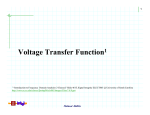
Physics 344 Foundations of 21st Century Physics: Relativistic and Quantum Systems Instructor: Dr. Mark Haugan Office: PHYS 282 [email protected] TA: Dan Hartzler Office: PHYS 7 [email protected] Grader: Fan Chen Office: PHYS 222 [email protected] Office Hours: If you have questions, just email us to make an appointment. We enjoy talking about physics! Help Session: Thursdays 2:00 – 4:00 in PHYS 154 Reading: Chapters 1 through 8 in Six Ideas that Shaped Physics, Unit R. Exam 1: Wednesday, October 5 at 8:00pm in WTHR 104 The Aberration of Starlight As is often the case, care in choosing the coordinate system to represent a physical system can make it easier to predict and explain phenomena. In relativistic situations, one often has the added difficulty of dealing with two coordinate systems, S and S’ , at once. We require S’ to be in standard orientation relative to S so that we can use the standard form of the Lorentz transformation equations a to analyze situations S: inertial frame in which the Sun is essentially at rest throughout the year. Earth is moving in the x direction at speed V = 30 km/sec at t = 0. Sun So, S’ in standard orientation and moving at speed V relative to S has the Earth momentarily at rest at the origin and is a good approximation to a coordinate system fixed in an observatory on Earth near t = t’ = 0. y Earth location at t = 0 z x We are interested in observations of a star made near that time. The star in question is located on the positive y axis of S, so a photon that arrives at the Earth’s location at t = 0 has traveled straight down the y axis. The red dots are events on its worldline. The time and space separations measured between them in S are ∆t21, ∆x21 = 0 and ∆y21 = - c∆t21. We use the Lorentz transformation equations to determine the time and space separations between events 1 and 2 measured in S’. ′ = γ∆t21 ∆t21 y 1 ′ = −γ V ∆t21 ∆x21 ′ = −c∆t21 y’ ∆y21 2 Sun z x We conclude that the star will be observed in the direction inclined at an angle θ toward the x’ axis and away from the y’ axis with tan θ ≈ θ = 1 ′ ∆y21 2 ′ ∆x21 ′ | γV | ∆x21 = ≈ 10−4 radians ′ | c | ∆y21 This is a bit more than 20 seconds of arc and easily measured by astronomers. x’ Six months later, the position of this star measured in the Earth’s frame will be inclined at the same angle but in the opposite direction from the y’ axis. S: inertial frame in which the Sun is essentially at rest throughout the year. Sun V Earth location at t = 6 months y Q1. The direction of a star located on the x axis measured in the Earth observatory at these two times would be Earth location at t = 0 z x A) inclined 20 arcseconds away from the x’ direction, toward y’ direction at t = 0 and away at t = 6 months B) inclined 20 arcseconds away from the x’ direction, away from y’ direction at t = 0 and toward at t = 6 months * C) along x’ axis at both times. Observations of such yearly variations in the relative directions of stars were first reported by Bradley in 1728. Geometry The examples we examined briefly during recitation yesterday were intended to remind us that geometry is about spatial properties like lengths of line segments and angles between them that are independent of any coordinate system that we might choose to use to represent the segments. They were also intended to remind us of some of the ways in which we’ve learned to analyze geometrical situations without choosing a coordinate system. In the context of the Euclidean geometry it is extremely useful to connect the geometrical properties of line segments like QP with the algebraic properties of directed line segments like the separation or displacement vector that runs from P to Q. Q ∆rQP P The algebra of such vectors includes the dot product which allows us to express and work with geometric properties and relationships like lengths and angles algebraically, independent of any specific coordinate system. So, for example, the squared length of the segment is simply 2 ∆rQP = ∆rQP ⋅ ∆rQP We can also use this algebra to establish geometrical relationships (theorems) without ever specifying a coordinate system. C = B− A A θ B A ⋅ B = A B cos θ geometric definition of the dot product. For example, the cosine law ( Even when we use a coordinate system to represent a situation, this kind of coordinate-free reasoning is a powerful tool. For example, A = cos θ xˆ + sin θ yˆ )( ) 2 | C | = C ⋅C = B − A ⋅ B − A = B ⋅ B − 2A⋅ B + A⋅ A 2 2 =| B | −2 | A || B | cos θ + | A | y unit circle A θ B = cos ϕ xˆ − sin ϕ yˆ so, A ⋅ B = cos(θ + ϕ ) = (cos θ xˆ + sin θ yˆ ) ⋅ (cos ϕ xˆ − sin ϕ yˆ ) = cos θ cos ϕ − sin θ sin ϕ ϕ x B since xˆ ⋅ xˆ = 1 xˆ ⋅ yˆ = 0 yˆ ⋅ yˆ = 1 Spacetime Geometry Since physics, like geometry, happens whether or not we choose a coordinate system to represent a physical, or geometrical, situation, we expect to be able to reason in coordinate-free, therefore, geometrical, ways about relativistic physics. Actually, we have been using the fact that directed line segments in spacetime diagrams “add” head-totail and can be multiplied by scalars like vectors all along. Let’s simply be explicit about it by introducing dimensionless unit vectors parallel to an inertial coordinate system’s time and space axes so that we ⇒ can write ∆sQP = ∆tQPtˆ + ∆xQP xˆ t Q ⇒ ∆tQP 4-vector separation ∆sQP ∆tQP tˆ P ∆xQP xˆ ∆xQP x Consider two such spacetime separation 4-vectors 2 t ⇒ ⇒ ∆s20 = ∆t20tˆ + ∆x20 xˆ ⇒ ∆s20 ⇒ Their difference is another separation 4-vector ⇒ ⇒ ∆s10 ⇒ ∆s21 = ∆t21tˆ + ∆x21 xˆ = ∆s20 − ∆s10 = ( ∆t20tˆ + ∆x20 xˆ ) − ( ∆t10tˆ + ∆x10 xˆ ) = ( ∆t20 − ∆t10 ) tˆ + ( ∆x20 − ∆x10 ) xˆ ⇒ ∆s21 = ∆s20 − ∆s10 ⇒ ∆s10 = ∆t10tˆ + ∆x10 xˆ ⇒ 1 0 x so, the familiar algebra of vector addition and multiplication by scalars correctly expresses the way that coordinate differences represent separations between pairs of events. It turns out that we can introduce a dot product* that correctly expresses the the relationship between the squared interval separating a pair of events and the coordinate differences that represent their spacetime separation. ⇒ ⇒ tˆ ⋅ tˆ = 1 ∆s10 ⋅ ∆s10 = ( ∆t10tˆ + ∆x10 xˆ ) ⋅ ( ∆t10tˆ + ∆x10 xˆ ) since xˆ ⋅ tˆ = 0 2 2 2 2 ˆ ˆ ˆ = ∆t10t ⋅ t + 2∆t10 ∆x10 xˆ ⋅ t + ∆x10 xˆ ⋅ xˆ = ∆t10 − ∆x10 xˆ ⋅ xˆ = −1 * A mathematician would refer to this as a psuedo-dot or psuedo-inner product because of the – signs. The minus sign on the right simply expresses the fact that the dimensionless unit vector in the x direction points in a spacelike direction, as do the unit vectors in the y and z directions. tˆ ⋅ tˆ = 1 ⇒ ⇒ ∆s10 ⋅ ∆s10 = ( ∆t10tˆ + ∆x10 xˆ ) ⋅ ( ∆t10tˆ + ∆x10 xˆ ) since xˆ ⋅ tˆ = 0 = ∆t102 tˆ ⋅ tˆ + 2∆t10 ∆x10 xˆ ⋅ tˆ + ∆x102 xˆ ⋅ xˆ = ∆t102 − ∆x102 xˆ ⋅ xˆ = −1 The geometric interpretation of this spacetime dot product is confirmed by the fact that the dot product of two 4-vectors is an invariant. Consider, 2 2 2 ∆s21 = ∆t21 − ∆x21 = (∆t20 − ∆t10 ) 2 − (∆x20 − ∆x10 ) 2 2 t ⇒ ⇒ ⇒ ∆s21 = ∆s20 − ∆s10 ⇒ 2 = (∆t20 − 2∆t20 ∆t10 + ∆t102 ) 2 − (∆x20 − 2∆x20 ∆x10 + ∆x102 ) 2 2 = ∆t20 − ∆x20 ∆s20 − 2 ( ∆t20 ∆t10 − ∆x20 ∆x10 ) ⇒ ∆s10 1 + ∆t102 − ∆x102 0 ⇒ x ⇒ ⇒ ⇒ ≡ ∆s − 2 ∆s20 ⋅ ∆s10 + ∆s102 2 20 The dot product ∆s20 ⋅ ∆s10 = ( ∆t20 ∆t10 − ∆x20 ∆x10 ) must be an invariant, i.e., frameindependent quantity, because the intervals between event pairs are. Timelike Displacement 4-Vectors and Particle 4-Velocity We will examine the relationship between the dimensionless unit vectors of an inertial coordinate system S and those of a system S’ in standard orientation relative to S in detail next time. However, because we know how coordinate differences representing the spacetime separations between pairs of events transform, using SR units, ∆t ′ = γ ( ∆t − V ∆x ) ∆x′ = γ (∆x − V ∆t ) ∆y′ = ∆y ∆z′ = ∆z we know how things have to work out. The 4-vector representing the spacetime separation between a pair of events is not invariant in the way that the interval between the events is, but the 4-vector is a new kind of frame-independent (geometrical) object that will be represented by different components in different frames, ⇒ ∆s = ∆ttˆ + ∆xxˆ + ∆yyˆ + ∆zzˆ = ∆t ′tˆ′ + ∆x′xˆ′ + ∆y′yˆ ′ + ∆z′zˆ′ Considering the separation 4-vector for two events on the worldline of a particle and using what we’ve learned about proper time, we can introduce a frame independent way to deal with particle motion. As we’ve done before, we consider pairs of events on a particle’s world line close enough so that the particle’s velocity does not change appreciably in the time-like interval. This means that the proper time lapse measured between the events by a clock moving with the particle is simply the invariant timelike interval between the events. 1 ∆x21 2 ∆y21 2 ∆z21 2 ) +( ) +( ) ∆t21 ( c 2 ∆t21 ∆t21 ∆t21 ∆t ∆τ 21 = 1 − v 2 / c 2 ∆t21 = 21 γ ∆τ 21 = 1 − This diagram is drawn from the perspective of a frame S and in that frame the particle’s displacement 4-vector is represented as 2 ⇒ ∆t21 ∆s21 1 ∆x21 ⇒ ∆s21 = ∆t21tˆ + ∆x21 xˆ + ∆y21 yˆ + ∆z21 zˆ We can use it and the proper time interval to construct a 4-vector that provides a frame-independent way to work with the particle’s motion. The particle’s 4-velocity vector is simply the displacement 4-vector rescaled by dividing it by the corresponding invariant proper time interval. So, ⇒ ∆s21 = ∆t21tˆ + ∆x21 xˆ + ∆y21 yˆ + ∆z21 zˆ t and ⇒ event 2 on worldline ⇒ ∆τ 21 = ∆s21⋅ ∆s21 ⇒ = 1 − ( vx2 − v y2 − vz2 )∆t21 ≡ 1 γ ∆s21 ∆t21 ∆t21 ∆x21 event 1 on worldline yields ⇒ ⇒ u≡ ∆s21 ∆t21 ˆ ∆x21 ∆y ∆z = t+ xˆ + 21 yˆ + 21 zˆ ∆τ 21 ∆τ 21 ∆τ 21 ∆τ 21 ∆τ 21 = γ tˆ + γ vx xˆ + γ vy yˆ + γ vz zˆ particle worldline x ⇒ ⇒ Notice that because ∆τ 21 = ∆ s21⋅ ∆ s21 particle 4-velocity is a dimensionless unit vector tangent to the particle’s worldline, ⇒ ⇒ ⇒ u⋅ u ≡ ⇒ ⇒ ⇒ ∆s21 ∆s21 ∆s21⋅ ∆s21 ⋅ = =1 2 ∆τ 21 ∆τ 21 ∆τ 21 Particle 4-velocity is a useful, frame-independent measure of particle motion because its components in any frame S are simply related to the components of the particle’s velocity measured in that frame. Since ⇒ ∆s21 ∆t21 ˆ ∆x21 ∆y21 ∆z21 ˆ ˆ u≡ = t+ x+ y+ zˆ ∆τ 21 ∆τ 21 ∆τ 21 ∆τ 21 ∆τ 21 = γ tˆ + γ vx xˆ + γ vy yˆ + γ vz zˆ ⇒ we have vx = ux / ut , vy = uy / ut and vz = uz / ut . Also, because a particle’s 4-velocity is simply its displacement 4-vector rescaled by a scalar, the Lorentz transformation equations transform the components of the 4-velocity from a frame S to S’ in the same way that they transform components of the displacement 4-vector, in SR units, ut ' = γ ( ut − Vu x ) u x′ = γ (u x − Vut ) u y′ = u y u z′ = u z which is much simpler transformation equations for velocity components that we derived earlier.