


Symmetric tensors and symmetric tensor rank
... Despite a growing interest in the symmetric decomposition of symmetric tensors, this topic has not been adequately addressed in the general literature, and even less so in the engineering literature. For several years, the alternating least squares algorithm has been used to fit data arrays to a mul ...
... Despite a growing interest in the symmetric decomposition of symmetric tensors, this topic has not been adequately addressed in the general literature, and even less so in the engineering literature. For several years, the alternating least squares algorithm has been used to fit data arrays to a mul ...

high speed cordic design for fixed angle of rotation
... In cascade CORDIC design ,for reducing the area and time-complexities, a hardwired pre-shifting scheme in barrel-shifters of the proposed circuits is proposed [1] .Here CORDIC design is capable of producing angle of rotation with approximated error with in 4 iteration ( no of iteration is reduced to ...
... In cascade CORDIC design ,for reducing the area and time-complexities, a hardwired pre-shifting scheme in barrel-shifters of the proposed circuits is proposed [1] .Here CORDIC design is capable of producing angle of rotation with approximated error with in 4 iteration ( no of iteration is reduced to ...




The geometry of proper quaternion random
... = µq . Also, any pure unit quaternion µ has the property that µ2 = −1. An other important way of looking at quaternions is to consider them as pairs of complex numbers. This can be nicely done using the Cayley-Dickson form of a quaternion q = a + bi + cj + dk which reads: q = z1 + z2 j 1 The ...
... = µq . Also, any pure unit quaternion µ has the property that µ2 = −1. An other important way of looking at quaternions is to consider them as pairs of complex numbers. This can be nicely done using the Cayley-Dickson form of a quaternion q = a + bi + cj + dk which reads: q = z1 + z2 j 1 The ...

Lie Algebras and Representation Theory
... (1) A left action of G on X is a map ϕ : G × X → X such that ϕ(e, x) = x and ϕ(g, ϕ(h, x)) = ϕ(gh, x) for all x ∈ X and g, h ∈ G. (2) Given a left action ϕ : G × X → X and a point x0 ∈ X we define the orbit G · x0 of x0 to be the subset {x : ∃g ∈ G : ϕ(g, x0 ) = x} ⊂ X and the isotropy subgroup Gx0 ...
... (1) A left action of G on X is a map ϕ : G × X → X such that ϕ(e, x) = x and ϕ(g, ϕ(h, x)) = ϕ(gh, x) for all x ∈ X and g, h ∈ G. (2) Given a left action ϕ : G × X → X and a point x0 ∈ X we define the orbit G · x0 of x0 to be the subset {x : ∃g ∈ G : ϕ(g, x0 ) = x} ⊂ X and the isotropy subgroup Gx0 ...


Notes on Smooth Manifolds and Vector Bundles
... is a diffeomorphism for every (U, ϕ) ∈ FM . A composition of two smooth maps (local diffeomorphisms, diffeomorphisms) is again smooth (a local diffeomorphism, a diffeomorphism). It is generally impractical to verify that the map (2.1) is smooth for all (U, ϕ) ∈ FM and (V, ψ) ∈ FN . The following lem ...
... is a diffeomorphism for every (U, ϕ) ∈ FM . A composition of two smooth maps (local diffeomorphisms, diffeomorphisms) is again smooth (a local diffeomorphism, a diffeomorphism). It is generally impractical to verify that the map (2.1) is smooth for all (U, ϕ) ∈ FM and (V, ψ) ∈ FN . The following lem ...

Supersymmetry for Mathematicians: An Introduction (Courant
... minimum, but the equations express only the fact that that the path is an extremum, i.e., a stationary point in the space of paths for the action functional. The variational interpretation of these equations implies at once that the dynamical equations are coordinate independent. Under suitable cond ...
... minimum, but the equations express only the fact that that the path is an extremum, i.e., a stationary point in the space of paths for the action functional. The variational interpretation of these equations implies at once that the dynamical equations are coordinate independent. Under suitable cond ...
MA.912.G.3.3
... On the coordinate plane at right quadrilateral PQRS has vertices with integer coordinates. ...
... On the coordinate plane at right quadrilateral PQRS has vertices with integer coordinates. ...



Spherical Geometry Toolkit Documentation
... and latitude. While these representations are convenient, they have discontinuities at the poles, making operations on them trickier at arbitrary locations on the sky sphere. Therefore, all internal operations of this library are done in 3D vector space, where coordinates are represented as (x, y, z ...
... and latitude. While these representations are convenient, they have discontinuities at the poles, making operations on them trickier at arbitrary locations on the sky sphere. Therefore, all internal operations of this library are done in 3D vector space, where coordinates are represented as (x, y, z ...



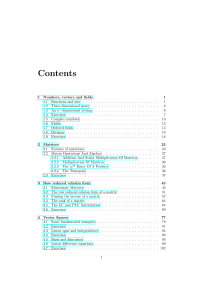
Matrices and Linear Algebra with SCILAB
... write the summation symbol, Σ, with its associated indices, if he used the convention that, whenever two indices were repeated in an expression, the summation over all possible values of the repeating index was implicitly expressed. Thus, the equation for the generic term of a matrix multiplication, ...
... write the summation symbol, Σ, with its associated indices, if he used the convention that, whenever two indices were repeated in an expression, the summation over all possible values of the repeating index was implicitly expressed. Thus, the equation for the generic term of a matrix multiplication, ...

