Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Relativistic mechanics wikipedia , lookup
Wave packet wikipedia , lookup
Old quantum theory wikipedia , lookup
Jerk (physics) wikipedia , lookup
Fictitious force wikipedia , lookup
Classical mechanics wikipedia , lookup
Surface wave inversion wikipedia , lookup
Length contraction wikipedia , lookup
Brownian motion wikipedia , lookup
Hunting oscillation wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Matter wave wikipedia , lookup
Equations of motion wikipedia , lookup
Seismometer wikipedia , lookup
Classical central-force problem wikipedia , lookup
1206 - Concepts in
Physics
Wednesday, November 18th 2009
Notes
• Assignment #6 due today !!! (before NOON)
• Assignment #7 due next Wednesday
• Please pick up Assignments #1 - #5 ....
• Still have midterms (first round) to be picked
up
• Second round of midterms won’t be available
this week.
Example: circular motion with constant
angular speed
A particle rotates counterclockwise in a circle of radius 3.00 m with a constant angular
speed of 8.00 rad/s. At t = 0, the particle has an x coordinate of 2.00 m and is moving to
the right.
We have a particle in uniform circular motion, as the shadow we discussed last lecture
for simple harmonic motion and the reference circle.
So, we can use x = A cos(ωt + Φ) to determine the x coordinate of the rotating
particle, with ω = 8.00 rad/s and A = 3.00 m:
x = A cos(ωt + Φ) = (3.00m) cos(8.00t +Φ)
We can find Φ by using the initial condition x = 2.00 m and t = 0:
2.00m = (3.00m) cos(0 + Φ)
Therefore Φ = cos-1(2.00m/3.00m) = cos-1(0.667) = -48.2° = -0.841 rad
the minus sign is correct, because it was given that the particle moves to the right.
Therefore the x coordinate in dependence of time is: x = (3.00 m) cos(8.00t -0.841)
In a similar way the velocity and acceleration can be expressed in dependence of time.
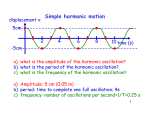
ϕ is called the phase of the movement and describes where in the cycle we start.
Pendulum
A simple pendulum consists of a particle of mass m, attached to a frictionless pivot
P by a cable of length L an negligible mass. When the particle is pulled away from its
equilibrium position by an angle Θ and released, it swings back and forth. By attaching a
pen to the bottom of the swinging particle and moving a strip of paper beneath it at a
steady rate, we can record the position of the particle as time passes. The graphical
record reveals a pattern that is similar (but not identical) to the sinusoidal pattern for
simple harmonic motion.
The force of gravity is responsible for the back-andP
L
Θ
l
T
s
lever arm l is nearly equal to the
arc length s (for small angles)
forth rotation about the axis at P. The rotation speeds
up as the particle approaches the lowest point on the
arc and slows down on the upward part of the swing.
Eventually the angular speed is reduced to zero, and
the particle swings back. From earlier discussion, we
know that a net torque is required to change the
angular speed. The gravitational force mg produces
this torque. The tension T in the cable creates no
torque, because it points directly at the pivot P and,
therefore, has a zero lever arm l, so that τ = -(mg)l.
The minus sign is included since the torque is a
restoring torque: that is, it acts to reduce the angle Θ.
The angle Θ is positive (counterclockwise) , while the
torque is negative (clockwise). The lever arm l is the
perpendicular distance between the line of action of
mg and the pivot P.
P
L
Θ
T
l
s
Let’s look at the similarity between s and l for
small angles Θ (< 10°). If Θ is expressed in
radians, the arc length and the radius L of the
circular path are related, according to s = LΘ.
Under these conditions, it follows that l ≈ s =
LΘ, and the torque created by gravity is
τ ≈ -mgL Θ
we can summarize mgL as one constant k’.
Therefore for small angles the torque that
restores the pendulum to its vertical equilibrium
position is proportional to the angular
displacement Θ.
The expression τ = -k’Θ has the same form as Hooke’s law restoring force for an ideal spring,
F = -kx. Therefore, we expect the frequency of the back-and-forth movement of the pendulum to
be given by an equation analogous to ω = 2πf = sqrt(k/m). In place of the spring constant k, the
constant k’ = mgL will appear, and as usual in rotational motion, in place of the mass m, the
moment of inertia I will appear:
ω = 2πf = sqrt(mgL/I)
(small angles only)
The moment of inertia of a particle of mass m, rotation at a radius r = L about an axis, is given by
I = mL2. Substituting this expression, we obtain ω = 2πf = sqrt(g/L) (small angles only) .
Note! The mass has been eliminated algebraically, so only the length L and the acceleration due
to gravity g determine the frequency of a simple pendulum. For large angles, the pendulum does
not exhibit a simple harmonic motion.
Using a pendulum to keep time
Determine the length of a simple pendulum that will swing back and forth in simple
harmonic motion with a period of 1.00 s.
When a simple pendulum is swinging back and forth in simple
harmonic motions its frequency f is given by f = 1/(2π) sqrt(g/L),
where g is the acceleration due to gravity and L is the length of the
pendulum. We also know that the frequency is the given by 1/T. We can
replace f by 1/T and then solve for L.
The length of the pendulum is
L = T2g/(4π2) = (1.00 s)2(9.80 m/s2)/(4π2) = 0.248 m
If the object performing the movement is extended, the pendulum is
called a physical pendulum. For a rigid object, the proper moment
of inertia must be used. The length L for a physical pendulum is the
distance between the axis at P and the center of gravity of the
object. The next example deals with an important type of physical
pendulum.
Pendulum Motion and Walking
When we walk, our legs alternately swing forward about the hip joint as a pivot. In this
motion the leg is acting approximately as a physical pendulum. Treating the leg as a
uniform rod of length D = 0.80 m, find the time it takes for the leg to swing forward.
The time it takes for the leg to swing forward is one-half of the period T, which is
related to the frequency f by f = 1/T. For a physical pendulum the frequency is given by
f = 1/(2π) sqrt(mgL/I), where the moment of inertia for a thin rod of length D rotation
about an axis perpendicular to one end is given a I = 1/3mD2. Since we are treating the
leg as a thin rod, the center of gravity is a the center L = 0.40 m.
We find f = 1/T = 1/(2π) sqrt(mgL/I)
or T = 2π sqrt(I/mgL)
T = 2π sqrt{(1/3mD2)/(mgL)} = 2πD/sqrt(3gL) = 2π (0.80 m)/sqrt(3x9.8m/s2x0.40m)
= 1.5 s
The desired time is one-half of the period or 0.75 s.
Example: A swinging rod
A uniform rod of mass m and length L is pivoted about one
end and oscillates in a vertical plane. Find the period of
oscillation if the amplitude of the motion is small.
Since the rod (swinging forth and back) is not a point
particle, we use what we have learned about a physical
pendulum. The moment of inertia for a uniform rod about
an axis through one end is 1/3mL2. The distance d from
the pivot to the center of mass of the rod is L/2.
Period T = 2π sqrt(I/mgL)
Pivot
cm
FG = mg
Using the expressions describes above:
T = 2π sqrt{(1/3mL2)/(mgL/2)} = 2π sqrt{2L/3g}
To think about at home: In one of the Moon landings, an astronaut walking on the
Moon’s surface had a belt hanging from his space suit, and the belt oscillated as a
physical pendulum. A scientist on the Earth observed this motion of television and
used it to estimated the acceleration due to gravity on the Moon. Which quantities
would he have to estimate (measure) and how did he make this calculation?
Example for completeness: Torsional Pendulum
A rigid object suspended by a wire attached at the top to a
fixed support forms such a device. When the object is twisted
through some angle Θ, the twisted wire exerts on the object
a restoring torque that is proportional to the angular
position. So, the torsion τ = -κΘ (κ is torsion constant).
(Real life example is swings twisted - they will rotate back)
Applying Newton’s second law fro rotational motion, we
can obtain the equation for simple harmonic oscillation with
the period T = 2π sqrt(I/κ). This looks very similar to the
“linear” pendulum and is called a torsional pendulum. There
is also a small angle restriction here, the situation has to be
within the elastic limit of the wire.
Damped harmonic motion
In simple harmonic motion, an object oscillates with a constant amplitude, because
there is no mechanism for dissipating energy. In reality, however, friction or some
other energy-dissipating mechanism is always present. In the presence of energy
dissipation, the amplitude of oscillation decreases as time passes, and the motion is
not longer simple harmonic motion. Instead, it is referred to as damped
harmonic motion, the decrease in amplitude being called “damping”.
There are different degrees of
damping that can exist. The graph
on the left shows the Amplitude
over time. The red curve shows a
so-called underdamped version, it
is just slightly damped, but still
clearly as oscillation visible.
The damping can be so strong, that the oscillation does not appear. The smallest degree
of damping that completely eliminates the oscillations is termed “critical damping”, and
the motion is said to be critically damped (see green curve). When the damping
exceeds the critical value, the motion is said to be overdamped, and it will take a long
time to return to the equilibrium position (see blue curve).
Driven harmonic motion and
resonance
When energy is continually added to an oscillating system, the amplitude can be
increased significantly - we will look at this effect. Let’s remember, that we need an
agent to apply a force that stretches or compresses a spring initially to start the dimple
harmonic motion. Suppose this force is applied at all times, not just for a brief initial
moment. The force could be provided, for example, by a person who simply pushes and
pulls the object back and forth. The resulting motion is known as driven harmonic
motion, because the additional force drives or controls the behavior of the object to a
large extent. The additional force is identified as the driving force.
There is one particular important case of driven harmonic motion. When the driving
force has the same frequency as the spring system, then it always points in the direction
of the object’s velocity. The frequency of the spring system is f = (1/2π)sqrt(k/m) and is
called a natural frequency, because it is the frequency at which the spring system
naturally oscillates. Since the driving force and the velocity always have the same
direction, positive work is done on the object at all times, and the total mechanical
energy of the system increases. As a result, the amplitude of the vibration becomes
larger and will increase without limit, if there is no damping force to dissipate the
energy being added by the driving force. The situation is known as resonance.
Resonance
RESONANCE
Resonance is the condition in which a time-dependent force can transmit large
amounts of energy to an oscillation object, leading to a large amplitude motion. In the
absence of damping, resonance occurs when the frequency of the force matches a
natural frequency at which the object will oscillate.
The role played by the frequency of a driving force is a critical one. The matching of
this frequency with a natural frequency of vibration allows even a relatively weak force
to produce a large amplitude vibration, because the effect of each push-pull cycle is
cumulative. Resonance can occur with any object that can oscillate, and springs need
not be involved. The greatest tides occur in the Bay of Fundy, which lies between New
Brunswick and Nova Scotia. The difference between water level at high an low tides
averages in some locations 15 m. This phenomenon is partly due to resonance. The
time, or period, that it takes for the tide to flow into and ebb out of a bay depends on
the size of the bay, the topology of the bottom, and the configuration of the shoreline.
The ebb and flow of the water in the bay of Fundy has a period of 12.5 hours, which is
very close to the lunar tidal period of 12.42 hours. The tie then “drives” water into
and out of the Bay of Fundy at a frequency that nearly matches the natural frequency.
The result is the extraordinary high tide. (You can create a similar effect in bath tub by
moving back and forth in synchronism with the waves you’re causing).
Bay of Fundy
Any object has a natural
frequency. In the
construction of bridges,
you need to know this.
You want to avoid
choosing a natural
frequency that is close
to typical interactions.
Tacoma Narrow Bridge
In 1940, turbulent winds set up torsional vibrations in the Tacoma Narrows Bridge,
causing it to oscillate at a frequency near one of the natural frequencies of the structure.
This resonance condition led to the bridge’s collapse
Several versions of this movie are available
on you tube ...
Waves ...
Water waves have two features in common:
• A wave is a traveling disturbance
• A wave carries energy from one place to
another
Basic types of waves
There are two basic types of waves, transverse and longitudinal. We can use Slinky to
demonstrate them.
transversal
longitudinal
TRANSVERSE and LONGITUDINAL waves:
A transverse wave is one in which the disturbance occurs perpendicular to the direction of
travel of the wave.
A longitudianl wave is on in which the disturbance occurs parallel to the line of travel of the
wave.
Transverse waves - examples:
Longitudinal waves - examples:
radio waves
light waves
microwaves
instrument strings (guitar, banjo, ...)
sound wave
A wave can be a mixture of both types, water
waves certainly are





















![[2013 question paper]](http://s1.studyres.com/store/data/008881813_1-433cb609ef4aa3f6141509bf2df16e48-150x150.png)