Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Hunting oscillation wikipedia , lookup
Velocity-addition formula wikipedia , lookup
Coriolis force wikipedia , lookup
Jerk (physics) wikipedia , lookup
Nuclear force wikipedia , lookup
Modified Newtonian dynamics wikipedia , lookup
Electromagnetism wikipedia , lookup
Equations of motion wikipedia , lookup
Classical mechanics wikipedia , lookup
Mass versus weight wikipedia , lookup
Centrifugal force wikipedia , lookup
Fictitious force wikipedia , lookup
Fundamental interaction wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Newton's laws of motion wikipedia , lookup
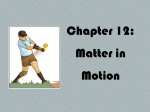
Note 05 Applying the Laws of Motion Sections Covered in the Text: Chapter 5 In this note we apply Newton’s Laws to solve some specific problems. We describe an object in uniform circular motion and consider the physics of an object moving through a viscous medium. We begin with the concept of friction. The existence of the force of friction eluded the natural philosophers such as Aristotle and others well into modern times. Indeed, it could be said that the understanding of the force of friction paved the way for the laws of motion. Forces of Friction Whenever two objects in contact are moved one against the other, some resistance to the movement is observed. This resistance is attributed to a force of friction over the area of the surfaces in contact. Two forces have been identified, the force of static friction and the force of kinetic friction. In both cases, the force is directed opposite to the direction of motion or to the direction of impending motion (in the case of objects not actually moving). Both types of friction are commonly quantified in terms of a coefficient. The motion of an object through a viscous medium such as air or a fluid is also resisted by a force of friction. Static Friction We all learn in childhood that in order to make an object like a block move across a floor we need to apply a force to the block. Careful study reveals that if the force applied is not great enough, then the block does not move. If the force is increased steadily, then a condition is eventually reached at which the block “breaks free” from the supporting surface and moves. This effect is interpreted to be the result of a force of static friction between the block and the supporting surface. The origin of the force is not difficult to identify. A critical observation is that the same object can be moved more easily over a smooth surface than a rough one. This means that the underside of the block and the supporting surface are not infinitely smooth. Microscopic jagged points in both surfaces must catch one another thereby resisting movement. Before the onset of movement, the force of static friction equals the applied force (as required by Newton’s third law) and is directed opposite to the applied force (or opposite to the direction of impending motion). This force is found to be proportional to the normal force the supporting surface exerts on the object (which is the same as the weight of the object if the surface is horizontal). Kinetic Friction We soon learn as well that once the block is moving, less force is required to keep the block moving at constant speed than is required to get the block moving in the first place. This implies the existence of a force of kinetic (moving) friction. If a force is applied to keep the block moving at constant speed, then the force of friction equals the applied force (as required by the first law). This force, too, is found to be proportional to the normal force. All things being equal the force of kinetic friction is less than the force of static friction. A wealth of experimental evidence reveals that the forces of static and kinetic friction can be written and f s ≤ µs n …[5-1a] f k = µk n , …[5-1b] where µ s and µ k are the coefficients of static and kinetic friction, respectively, and n is the normal force. Eq[51a] gives an upper bound; the maximum force of static friction is f s.max = µsn , which exists just before the block moves. Figure 5-1 summarizes these and other observations about static and kinetic friction. Figure 5-1. How the forces of static and kinetic friction vary with the force applied. 05-1 Note 05 Unhappily, the forces of static and kinetic friction are “messy” forces in the sense that the corresponding coefficients are not true physical constants; they depend on the types of materials in contact, on the smoothness of the surfaces and on environmental factors such as humidity and the existence of lubrication. Let us consider an example. (a) Before the block moves, the three forces put the block in a state of translational equilibrium. Applying Newton’s second law in component form to the block gives the equations and Example Problem 5-1 Determining µ s and µk Experimentally For any two dry materials in contact, the coefficients of static and kinetic friction can be calculated with the help of the simple apparatus sketched in Figure 5-2. A block made of the one material is placed on the surface of an inclined plane made of the other material. The angle θ of the plane is increased slowly until the block starts to move. (a) How is the coefficient of static friction related to the critical angle θc at which the block starts to move? (b) Describe how the coefficient of kinetic friction might be subsequently found. ∑F x = mg sin θ – f s = 0 , …[5-2a] ∑F = n – mg cosθ = 0 . …[5-2b] y These equations apply for any angle θ of inclination. But at the critical angle θc at which the block is on the verge of slipping, the force of static friction has its maximum magnitude, µsn. Thus eq[5-2a] at that point gives mg sin θ c = µsn . …[5-3a] Now rearranging eq[5-2b] we have mg cos θc = n . …[5-3b] Dividing eq[5-3a] by eq[5-3b] gives µs = tanθ c . …[5-4a] Thus the coefficient of static friction equals the tangent of the critical angle. Thus a measurement of θc enables us to calculate µ s . Figure 5-2. Free-body diagram of a block on an inclined plane. (b) The coefficient of kinetic friction can be found as follows. Ordinarily, if the angle of inclination were held constant after the block starts to move, then the block would actually accelerate down the incline. But if immediately after the block starts to move, the angle were reduced to, say, θ’ so that the block moves down the incline at constant speed then the first law requires that the sum of the x-components of force is zero, i.e., Fx = 0 . ∑ Thus from eq[5-2a] Solution: For convenience we choose a coordinate system in which the x-axis points downwards parallel to the incline and the y-axis points upwards perpendicular to the incline. Three forces act on the block whether it is moving or not: the component of the force of gravity acting parallel to the incline downwards, the normal force acting perpendicular to the incline and the force of friction (static or kinetic depending on whether the block is stationary or moving) acting upwards parallel to the incline. 05-2 f k = mg sinθ , and f k = µk n = µk mgcosθ '= mgsin θ ' . Thus µk = tanθ ' . …[5-4b] € Thus the coefficient of kinetic friction equals the tangent of the angle θ’. Since θ’ is observed to be less than θc it follows € that µk < µs . Note 05 Example Problem 5-2 Calculating Coefficients of Friction the corresponding position vectors. In the elapsed time ∆t = tf – ti the position vector sweeps out an angle ∆θ. A wooden block of mass 1.00 kg is placed on an inclined plane made of steel. The angle of inclination of the plane is slowly increased, until at 32.0˚ the block starts to move. Subsequently, when the angle is reduced to 26.0˚, the block moves at a constant speed down the incline. (a) Calculate the coefficients of static and kinetic friction. (b) Calculate the maximum force of static friction and the force of kinetic friction. vi f Δr i ri Δθ vf rf vi Δθ Solution: (a) From eqs[5-4] we have: Δv vf µs = tan 32.0o = 0.625 and µk = tan 26.0 o = 0.488 . (b) The maximum force of static friction is f s = mg sin θc = (1.00kg)(9.80m.s –2 )sin32.0 o = 5.19 N. and the force of kinetic friction is f k = mg sinθ ' , = (1.00kg)(9.80m.s –2 )sin26.0 o = 4.30 N. Figure 5-3. A particle moving clockwise with uniform circular motion. We wish (1) to show that the particle is undergoing an acceleration, (2) to calculate the magnitude of that acceleration and (3) to show that the acceleration vector is directed towards the center of the circle. The first thing to appreciate about this kind of motion is that although the particle is moving with constant speed and the magnitude of the velocity vector does not change, the direction of the velocity vector does change and changes continuously. A diagram illustrating the relationship between the velocity vectors is shown to the right in the figure. From this diagram it can be seen that Thus the force required to start the block moving is greater than the force required to keep the block moving at constant speed once it is moving. Newton’s Second Law Applied to a Particle in Uniform Circular Motion We have all seen objects being spun in a circle. A ball on the end of a string is one example. With the tools we have developed we can describe this motion. Consider a ball modelled as a particle moving clockwise in a circle at constant speed v (Figure 5-3). Shown are two positions i and f on the particle’s path. The vectors locating i and f relative to the center of the circle are also shown, along with the instantaneous velocity vectors of the object at the two positions. The instantaneous velocity vectors point along tangents to the particle’s path and are therefore perpendicular to Δv = v f – v i . Since the direction of the particle’s velocity vector is changing, the particle is, by definition, undergoing an acceleration. According to its definition laid down in Note 03, the average acceleration is the change in velocity divided by the elapsed time: a= v f – v i Δv = . t f – ti Δt …[5-5] You should be able to see that the triangles formed by the position and velocity vectors in the figure are isosceles triangles and are similar having the same inner angle ∆θ. Thus the following relationship holds:1 1 These ratios define the inner angle in radians. There will be 05-3 Note 05 | Δv | | Δr | = . v r Subsituting for |∆ v | from eq[5-5] we can obtain the magnitude of the average acceleration: | a | Δt | Δr | = v r v | Δr | . r Δt | a |= yields We have already seen that since the velocity of the ball is continuously changing, the ball is undergoing a centripetal acceleration. Its magnitude is given by eq[5-6] and its direction is towards the center of the circle. This centripetal acceleration is caused by the force exerted on the ball; the magnitude of this force is the tension T in the string. We can therefore write in accordance with the second law: The magnitude a of the instantaneous acceleration vector is obtained by taking the limit of the magnitude of the average acceleration as ∆t → 0: a = lim | a |= Δ t→ 0 v | Δr | v 2 lim = . r Δt → 0 Δt r Thus we have the magnitude of the acceleration. To get the direction of the acceleration vector notice that as ∆t → 0, so also does ∆θ → 0 and Δv becomes perpendicular to v i or antiparallel to r i . Since it is antiparallel to r i it is automatically pointing toward the center of the circle. This acceleration is called a centripetal acceleration (centripetal, meaning centerseeking) and is commonly denoted ac : ac = v2 . r …[5-6] The time required for the particle to execute one complete revolution is called the period, and is commonly denoted T. The distance travelled by the particle in one revolution is the circumference of the circle, 2πr. T is the distance travelled divided by the speed: T= 2πr . v We can also describe uniform motion in a circle in terms of force. Figure 5-4 shows a more real-world representation of Figure 5-3. A ball on the end of a string is being moved at uniform speed v in a circle of radius r. To avoid the question of how the ball stays “up” we can assume that the ball is moving on a frictionless horizontal table (not shown) and that we are looking down from directly above the table. more on the radian in Note 10. 05-4 Figure 5-4. A body in uniform circular motion. The hand exerts a force on the ball whose magnitude is the tension T in the string. v2 ∑ F = mac = m r . The magnitude of the centripetal force required to move the ball in a circle is the tension T in the string. Example Problem 5-3 An Object in Uniform Circular Motion A ball of mass 0.500 kg is moved in a horizontal circle at a constant speed of 2.00 m.s–1 on a frictionless table (as depicted in Figure 5-4). Calculate the centripetal acceleration and the tension in the string. Solution: The magnitude of the centripetal acceleration is given by eq[5-6]: ac = Thus v 2 (2.00m.s –1) 2 = = 8.00 m.s–2 . r (0.500m) T = mac = (0.500kg)(8.00m.s –2 ) = 4.00 N. Note 05 An object in the real world has to move through a medium like air or water. We have already described a number of examples of objects moving through air and we have chosen to simply ignore the possible effect of the air on the object’s motion. In the next section we examine this special kind of frictional force. directed. Thus it has the form: Motion in the Presence of VelocityDependent Resistive Forces If the medium through which an object moves has sufficient density and the object moves with sufficient velocity, then the object will experience an appreciable frictional force that depends in a non-obvious way on its velocity relative to the medium. If the velocity is low then the frictional force is observed to be directly proportional to the velocity. If the velocity is high then the force is observed to be proportional to the square of the velocity. We consider here only the former type. Resistive Force Proportional to Object Velocity We consider this physical situation illustrated in Figure 5-5 because it is at the heart of the experiment “Simple Measurements” that you will be doing in the lab soon. The experiment is a simple one. A marble is released at the top of a cylinder of shampoo and allowed to fall slowly to the bottom. Two marks 0.500 m apart are etched on the cylinder to enable you to measure the marble’s average velocity (which is also the average speed in this case). (Average speed equals distance travelled divided by elapsed time.) Then from various measurements you can calculate the viscosity of the fluid. 2 The expression you will use to calculate the viscosity is derived on the assumption that the marble moves downwards at a constant velocity called the terminal velocity. Therefore a fundamental question asked is “does the marble move downwards at a velocity that is truly constant?” This question can be answered at least in principle by calculating how long the marble takes to reach a constant, maximum velocity, and if this time elapses before the timing of the marble’s fall is begun when the marble passes the top mark on the cylinder. We make the assumption that the resistive force R exerted on the marble by the fluid is directly proportional to the object’s velocity and is oppositely 2 The viscosity of a fluid is a measure of what could be called the fluid’s “stickiness”. This topic belongs to the study of fluids (Notes 12 & 13). In this first experiment in the lab the major objective is to master various kinds of measurements and not just to obtain the viscosity. Figure 5-5. (a) The free-body diagram of a marble falling through a fluid, and (b) the velocity of the marble as a function of elapsed time. What is meant by the time constant is shown. R = –bv . where b is a constant, dependent on factors such as the viscosity of the fluid and the radius of the marble.3 The object is moving downwards so we can apply the second law: Fy = may , ∑ or Fg + R = ma , which gives mg – bv = m dv . dt Rearranging we have dv b = g– v. dt m …[5-7] This is a first-order differential equation in v. You should 3 For a falling marble the constant b has the form 6πη(d/2) where d is the diameter of the marble and η is the viscosity. 05-5 Note 05 be able to show that a solution of the equation is: 4 –bt mg v(t) = 1 – e m , b …[5-8] −t = vT 1– e τ where we write vT = mg/b and τ = m/b. The factor vT has units of velocity and is called the terminal velocity. This is the velocity the object approaches after a sufficiently long time, i.e., as t → ∞. The quantity τ has units of time and is called the time constant (it goes by other names in other areas of physics where the variable has a similar form as eq[5-8]). 5 It is the time required for the velocity of the object to approach to within 1/e of the terminal velocity. In the fluid used in the experiment “Simple Measurements” this time is seen to be of the order of 10 milliseconds. The conclusion to be drawn is that the marble does indeed reach terminal velocity before timing actually begins. The Fundamental Forces of Nature As far as is known to physicists today, there are four fundamental forces in nature. They are the gravitational force, the electromagnetic force, the nuclear force and the weak force. We can discuss these only briefly. The Gravitational Force Isaac Newton was the first to describe the gravitational force in mathematical terms in 1686. According to his description any two masses attract each other with forces that are directly proportional to the product of their masses and inversely proportional to the square of the distance between their centers. In other words, for any two masses m1 and m 2 a distance r apart the magnitude of the force is Fg = G m1m2 . r2 G is a constant that today is called the universal gravitational constant. From numerous experiments its accepted value is:6 G = 6.67x10 –11 N.m2.kg –2, to 3 significant digits. We shall continue the study of this force in later notes. The Electromagnetic Force We have seen that mass is a fundamental property of matter. Charge is another. Charges attract or repel each other with a force called the electromagnetic force . It has a form similar to the gravitational force (with charge q instead of mass m and the electric constant k instead of the gravitational constant G). We shall discuss this force in detail in Note 20. The Nuclear and Weak Forces The nuclear force is the force responsible for keeping protons and neutrons bound together in the atomic nucleus. If this force did not exist then mutual repulsion between protons in the nucleus would cause the nucleus to fly apart. This force is a very short-range force and drops to virtually zero much beyond the nucleus itself. The weak force figures in radioactive decay. Its description belongs in a higher-level course in physics and is beyond the scope of these notes. The Gravitational Field The fundamental forces of nature are all non-contact forces. When Newton proposed that the force of gravity was, in essence, a non-contact force the idea was resisted by the natural philosophers of the day, in spite of the fact that the predictions based on it were so accurate. Scientists trained on ropes and pulleys found it hard to believe that two masses, like the Earth and the Moon, could exert forces on one another even though separated by many kilometers of empty space. The issue of contact was essentially side-stepped by the brilliant English experimentalist, Michael Faraday, in his proposal of the concept of the gravitational field. Faraday conjectured that any object by virtue of its mass sets up an entity in its surroundings called a gravitational field. The field is continuous in the sense of having a strength (a magnitude) and a direction at every point. The field is therefore a vector field. A second mass in the region of this field is, of necessity, in contact with the field at that point. The field in contact with the mass then gives rise to the gravitational force on the object.7 A field is associated with 4 To show that eq[5-8] is a solution of eq[5-7] it is sufficient to show that when it and its first derivative are substituted into eq[5-7] the LHS=RHS. 5 Time constants appear in other areas of physics, in particular in the experiment “The Capacitor” in the PHYA21 lab. 6 Do not confuse the universal gravitational constant G with the 05-6 acceleration due to gravity g. 7 Throughout their lifetimes, neither Faraday nor Newton had any idea as to how this might happen. Suffice us to say that the existence of the field, either gravitational, electric, nuclear or weak, has now been proven beyond doubt. Note 05 each force of nature, and in each case the field is regarded as the source of the force (and the source of the energy transferred). The gravitational field at the position of a test mass mt is defined as the vector g≡ Fg , mt the field vector always points toward the center of the Earth. …[5-9] where F g is the gravitational force on mt. In words, the gravitational field at some point in space is the gravitational force per unit mass at that point. In the case of gravity the gravitational field vector is what we know more familiarly as the acceleration due to gravity vector g . The definition, eq[5-9], provides a way of imagining how a gravitational field might be mapped, or represented graphically. We imagine that a test mass mt can be moved to various selected (arbitrary) positions in a region of space and the force per unit mass measured (by means of some instrument) at the chosen positions. A vector can then be drawn at every chosen position, with a magnitude equal to the magnitude of the gravitational force per unit mass, and with the direction of the gravitational force vector. The collection of vectors is the field map. For example, this effort carried out in the neighborhood of a spherically symmetric source mass might resemble Figure 5-6a in 2D space. The gravitational field is seen to have a radial geometry. The field always points toward the source mass and the magnitude of the field decreases as r increases (with an inverse square dependency). Of course, this picture is only a representation. If this procedure were carried out near the surface of the Earth the result might resemble Figure 5-6b in 2D space. This field is seen to be uniform. The magnitude of the field strength at every point is g and Figure 5-6. 2D representations of the gravitational field near a spherically symmetric source mass (a) and near the surface of the Earth (b) Having studied a number of applications of Newton’s Laws we are ready to consider the concept of energy. This we will do in Notes 08 and 09. To Be Mastered • • • • Definitions: force of static friction, force of kinetic friction, coefficient of static friction, coefficient of kinetic friction Definitions: centripetal acceleration, uniform circular motion Definitions: viscous force, time constant Definitions: field, gravitational field vector 05-7 Note 05 Typical Quiz/Test/Exam Questions 1. A block of mass 1.0 kg is in contact with a horizontal surface (see the figure). The coefficient of static friction between the surfaces is 0.7 and the coefficient of kinetic friction is 0.6. Three cases are shown: (1) when the net external force is zero, (2) when a force of 1.0 N is applied at an angle of 60˚ to the horizontal, and (3) when a force of 2.0 N is applied at an angle of 60˚ to the horizontal. 1.0 N block (1) 2.0 N 60˚ block block (2) (3) 60˚ Draw a free body diagram for the block in each case. 2. A ball of mass M is tied to the end of a string of length R and spun in a vertical circle at a constant speed v (see the figure). A T D B C (a) Draw free body diagrams for the ball at positions A, B, C and D. (b) If M = 1.0 kg, R = 1.0 m and v = 4.00 m.s–1, calculate the tension T in the string, in N, at the four positions. For convenience, take g = 10.0 m.s–2. 05-8