Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Theory of everything wikipedia , lookup
Standard Model wikipedia , lookup
Electron scattering wikipedia , lookup
Identical particles wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Elementary particle wikipedia , lookup
Derivations of the Lorentz transformations wikipedia , lookup
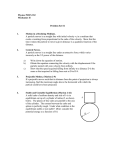
Physics 0089 Phys0089HO#8-982Spring 2001 5. THE VIEW FROM NONINERTIAL FRAMES Part of Newton's 3rd Law is that every real force is exerted by some real physical object, so that there is always a definite object on which the reaction-force will act. This is most obvious for contact forces, such as the pull of a string, the push of a stick, or the force of friction that one surface exerts on another surface in contact with it. But it also holds for action-at-adistance forces, e.g. the force of gravity. A free particle is one that has no real forces acting on it; Newton's Law of Inertia says that a free particle will have constant velocity and hence zero acceleration. With respect to a non-inertial frame, however, a free particle does not move with constant velocity. Therefore, to use a noninertial frame as though it were an inertial frame, you will have to introduce certain fictitious pseudo-forces to account for the observed accelerations of free particles. Pseudoforces are not real forces, because they are not exerted by any actual objects. Pseudo-forces are due solely to the use of an accelerating reference frame. Pseudo-forces are indistinguishable from gravitational forces (at least in small regions of space and for small intervals of time). Both, if acting alone, produce accelerations (and hence motions) that are the same for all particles that start from a given position with a given velocity, independent of their masses or chemical compositions. In a "freely falling" frame of reference, the apparent "weightlessness" could be interpreted as due to the real gravitational force being counterbalanced by a pseudo-force. Where real or apparent weightlessness exists, artificial gravity can be created by referring everything to a frame that has acceleration, either translational (i.e. in a straight line) or rotational. In a uniformly rotating frame of reference, there are two pseudo-forces acting on every particle: 1. Centrifugal force, which is directed radially outward with a magnitude that is proportional to the distance from the axis of rotation. 2. Coriolis force, which acts only on particles that are moving (with respect to the rotating frame of reference) and is directed perpendicular to their velocities. It therefore causes their directions of motion to change. As Seen in Rotating Frame As Seen in Inertial Frame 9 3 2 1 1 2 3 1, 2, 3, ... 9 (at rest) 9 1 2 3 9