Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Immunity-aware programming wikipedia , lookup
Mechanical filter wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Opto-isolator wikipedia , lookup
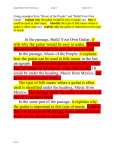
Mathematics of radio engineering wikipedia , lookup
Guitar technician wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Spectral density wikipedia , lookup
Regenerative circuit wikipedia , lookup
Analogue filter wikipedia , lookup
Utility frequency wikipedia , lookup
Ringing artifacts wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Stepper motor wikipedia , lookup
Chirp spectrum wikipedia , lookup
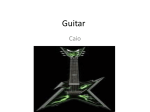
Oscilloscope history wikipedia , lookup
Analog-to-digital converter wikipedia , lookup
Kolmogorov–Zurbenko filter wikipedia , lookup
EGUITAR TUNER Mark Stocker Eastern Kentucky University Department of Technology OUTLINE Automatic Guitar tuning Amplification of signal Frequency Measurement Harmonic Interference 2 MOTIVATION Beginners often have trouble tuning their guitar properly. Self tuning guitars such as the Gibson Robot are extremely expensive ($4000!) http://www.youtube.c om/watch?v=WetVXb YRfWk 3 INTRODUCTION Each guitar string vibrates at a unique fundamental frequency. The fundamental frequency of the string directly relates to the musical note being played via the formula: 2 n / 12 440 Hz n is the number of steps away from middle A (which is exactly 440Hz) 4 PROBLEM STATEMENT Frequency measurement is typically done by custom made Digital Signal Processors (DSP’s). DSP’s take a lot of time and money to develop into a working product. 5 PROPOSED SOLUTION Analyze and tune the guitar using general purpose devices that are easily acquired and very inexpensive. Perform the signal processing and motor control in software instead of a hardware DSP device. 6 FREQUENCY MEASUREMENT Measure the voltage of the guitar signal using the Atmel AVR built in Analog-to-Digital convertor (ADC). Sample the change in voltage at a very high rate (200uS) to detect each time the waveform crosses the zero point or bias. After a predetermined number of zero crossings have been detected, determine frequency using the formula 1/T where T is the amount of time that passed during the sample. 7 FREQUENCY MEASUREMENT 8 FREQUENCY MEASUREMENT Compare the measured readings to those known to be in the correct range (+/- .05% of intended frequency) and tune string accordingly with a stepper motor. Standard Guitar Tuning: Frequency (Hz) Period E = 82.4069 0.0121 A = 110.0000 0.0091 D = 146.8324 0.0068 G = 195.9978 0.0051 B = 246.9417 0.0040 e = 329.62775 0.0030 Samples @ 200uS 606.75 454.5 340.5 255 202.48 151.69 9 PROBLEM #1 The output of the guitar is very weak. 3mV peak-topeak is typical. The 8-bit ADC of the AVR is setup to use a 5V reference voltage. We have 255 usable steps over the 5 volt range which is equal to 19mV per step. This will not allow us enough precision to detect the zero crossings of the wave form. The bias or baseline of the guitar signal needs to be at 2.56 volts, so we can detect both the positive and negative part of the waveform. 10 SOLUTION #1 Amplify and bias the signal using a simple op-amp circuit. 11 PROBLEM #2 Due to the varying stiffness of steel guitar strings, along with the fundamental frequency, harmonic frequencies are also generated, which can be quite powerful as seen below: 12 PROBLEM #2 The 2nd harmonic is especially powerful. Since we are only measuring zero crossings of the waveform, the harmonics end up being measured also, producing incorrect results. 13 SOLUTION #2 To prevent false readings, we will filter the harmonics from the signal in software, with the filter customized for each string. I use a bitshift in this filter (>>) to do the division in order to save CPU cycles. signal = ((filter * last_sample_value + (16 – filter) * sample_value)>>4); The value of filter is set according to current string selection. Lower values create a more narrow bandpass. 14 RESULTS The circuit and program are successful at reading determining the input frequency accurately. The stepper motor assembly is successful at tuning the strings automatically, although slow. 15 16 17 AVR uC Darlington Array String Selection BIAS OP-AMP Guitar Input 18 Stepper Motor Gear Reduction unit Guitar Interface MEDIA eGuitar tuner in action: http://www.youtube.com/watch?v=5ctUjII-M6Y http://www.youtube.com/watch?v=LXHzzM-_Uao eGuitar put to the test against commercial tuner: http://www.youtube.com/watch?v=rRlvrPupO9o eGuitar C code: http://www.stockmarker.org/AVR/eguitar/eguitar_code.ht ml 20 CONCLUSIONS Considering commercial guitar tuning devices use specialized DSP’s, I was quite surprised at how well the AVR functioned. I learned many new things during the project, such as filtering signals in software, the use of AVR ADC and Timers, and stepper motor control. 21 COST Device AVR uC LM324 op-amp Components 4x20 LCD Display Stepper assembly Power Supply Total Cost: Commercial Tuner: Savings: Cost $3 $0.50 $2 $10 $0 $0 $15.50 $80 $64.50 Source Mouser Mouser Mouser EBay Junk FB Scanner Junk Box 22 FUTURE WORK Use a shielded enclosure to prevent outside interference. Fine tune the OP-AMP circuit and implement hardware filters for faster and more accurate tuning. Streamline the program by writing it in pure assembly code. 23 SOFTWARE Only free / open source software was used in the making of this project, except for Microsoft PowerPoint. Operating System: Development Environment: Compiler: AVR Programmer: Signal Generation: Ubuntu Linux running KDE KATE AVR-GCC AVRdude Siggen 24 REFERENCES Atmel Corporation, ATtiny261/461/861 Datasheet, November 7th 2006, Retrieved from: http://www.atmel.com/dyn/resources/prod_documents/doc2588.pdf Atmel Corporation, Digital Filters with AVR, July 16th 2008, Retrieved from: www.atmel.com/atmel/acrobat/doc2527.pdf NonGNU.org, AVR Libc Online Manual, Retrieved from: http://www.nongnu.org/avr-libc/user-manual/index.html 25