Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Topology (electrical circuits) wikipedia , lookup
Electromagnetic compatibility wikipedia , lookup
Voltage optimisation wikipedia , lookup
Ground (electricity) wikipedia , lookup
Telecommunications engineering wikipedia , lookup
Three-phase electric power wikipedia , lookup
Fault tolerance wikipedia , lookup
Electronic engineering wikipedia , lookup
Stray voltage wikipedia , lookup
Utility frequency wikipedia , lookup
Electric power system wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Surge protector wikipedia , lookup
Wireless power transfer wikipedia , lookup
Opto-isolator wikipedia , lookup
Earthing system wikipedia , lookup
Electrification wikipedia , lookup
Buck converter wikipedia , lookup
Electric power transmission wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Electrical substation wikipedia , lookup
Mathematics of radio engineering wikipedia , lookup
Amtrak's 25 Hz traction power system wikipedia , lookup
Two-port network wikipedia , lookup
Mains electricity wikipedia , lookup
Power engineering wikipedia , lookup
Alternating current wikipedia , lookup
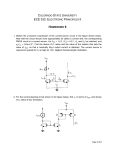
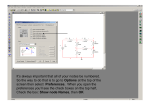
5 Numerical Simulation of Electrical Transients Switching actions, short-circuits, lightning strokes, and disturbances during normal operation often cause temporary overvoltages and high frequency current oscillations. The power system must be able to withstand the overvoltages without damage to the system components. The simulation of transient voltages and currents is of great importance for the insulation coordination, correct operation, and adequate functioning of the system protection. Transient phenomena can not only occur in a time frame of microseconds or (in the case of the initial rate of rise of the transient recovery voltages and short-line faults) milliseconds (when looking at transient recovery voltages because of switching actions) but can also be present for seconds, for instance, in the case of Ferro-resonance. Transients are usually composed of travelling waves on high-voltage transmission lines and underground cables, oscillations in lumped network elements, generators, transformers, and so on. To perform analytical transient calculations by hand is rather cumbersome or even impossible, and from the early days analogue scale models have been in use; the so-called Transient Network Analyser or TNA. The TNA consists of analogue building blocks, and transmission lines are built from lumped LC pi-sections. The first large TNA was built in the nineteen thirties and even today the TNA is used for large system studies. The availability of cheap computer power, at first mainframes, later workstations, and presently the personal computer had a great influence on the development of numerical simulation techniques. Sometimes it can be still convenient to make use of the TNA, but in the majority of the cases, computer programs, such as the widely spread and well-known electromagnetic transients program (EMTP) are used. These computer programs are often more accurate and cheaper than a TNA,but not always easy to use! The computer programs that were developed first were based on the techniques to compute the propagation, refraction, and reflection of travelling waves on lossless transmission lines. For each node, the reflection and refraction coefficients are computed from the values of the characteristic impedances of the connected transmission line segments. The bookkeeping of the reflected and refracted waves was done and visualised by means of a lattice diagram, as was first published by Bewley in 1933. Another fruitful development was the application of the Bergeron method based on the method that O. Schnyder in 1929, in Switzerland, and L. Bergeron in 1931, in France, had developed for solving pressure wave problems in hydraulic piping systems. The Bergeron method applied to electrical networks represents lumped network elements, like an L or a C, by short transmission lines. An inductance becomes a stub lossless line with a characteristic impedance Z = L/τ and a travel time τ . In the same manner, a parallel capacitance becomes a stub transmission line with a characteristic impedance Z = τ/C and a travel time τ . A series capacitor, however, poses a problem. Almost all programs for the computation of electrical transients solve the network equations in the time domain, but some programs apply the frequency domain, such as the frequency-domain transient program (FTP), or use the Laplace domain to solve the network equations. A great advantage of the frequency domain is that the frequency-dependent effects of highvoltage lines and underground cables are automatically included. The advantage of using the Laplace transform is that back transformation into the time domain results in a closed analytical expression. When a certain time parameter is substituted in that equation, the currents and voltages can directly be calculated for different circuit parameters. For a program with a solution directly in the time domain, the computation has to be repeated when a circuit parameter changes. The Laplace transform has, however, its drawbacks. The method cannot cope with nonlinear elements, such as surge arresters and arc models. In this chapter, two different time domain computer programs are described: • the Electromagnetic transient program, based on the Nodal Analysis from network theory; and • the MATLAB Power System Blockset. 5.1 THE ELECTROMAGNETIC TRANSIENT PROGRAM The electromagnetic transient program (EMTP) is the creation of H. W. Dommel, who started to work on the program at the Munich Institute of Technology in the early 1960s. He continued his work at BPA (Bonneville Power Administration) in the United States. The EMTP became popular for the calculation of power system transients when Dommel and Scott-Meyer, his collaborator in those days, made the source code public domain. This became both the strength and weakness of EMTP; many people spent time on program development but their actions were not always as concerted as they should have been. This resulted in a large amount of computer code for every conceivable power system component but very often without much documentation. This problem has been overcome in the commercial version of the program, the so-called EPRI/EMTP version. Electric Power Research Institute (EPRI) has recoded, tested, and extended most parts of the program in a concerted effort and this has improved the reliability and functionality of the transient program. Circuit breaker models are an example of the extended functionality added to the program in 1987 and improved in 1997, but are not available in the still-existing public domain version of the program; the alternative transient program (ATP). Presently, the EMTP and other programs that are built on a kernel (such as electromagnetic transients for DC (EMTDC) and power system computer-aided design (PSCAD)) based on the same principles are a widely used and accepted program for the computation of electrical transients in power systems. The EMTP is based on the application of the trapezoidal rule to convert the differential equations of the network components to algebraic equations. This approach is demonstrated in the following text for the inductance, capacitance, and lossless line. For the inductance L of a branch between the nodes k and m, it holds 𝑖𝑘,𝑚 (𝑡) = 𝑖𝑘,𝑚 (𝑡 − ∆) + 1 𝑡 ∫ (𝜐 𝜐 )𝑑𝑡 𝐿 𝑡−∆𝑡 𝑘− 𝑚 Integration by means of the trapezoidal rule gives the following equations 𝑖𝑘,𝑚 (𝑡) = ∆𝑡 (𝜐 (𝑡) − 𝜐(𝑡)) + 𝐼𝑘,𝑚 (𝑡 − ∆𝑡) 2𝐿 𝑘 𝐼𝑘,𝑚 (𝑡 − ∆𝑡) = 𝑖𝑘,𝑚 (𝑡 − ∆𝑡) + ∆𝑡 (𝜐 (𝑡 − ∆𝑡) − 𝜐𝑚 (𝑡 − ∆𝑡)) 2𝐿 𝑘 For the capacitance C of a branch between the nodes k and m, it holds 𝜐𝑘 (𝑡) − 𝜐𝑚 (𝑡) = 𝜐𝑘 (𝑡 − ∆𝑡) − 𝜐𝑚 (𝑡 − ∆𝑡) + 1 𝑡 ∫ 𝑖 (𝑡)𝑑𝑡 𝐶 𝑡−∆𝑡 𝑘,𝑚 Integration by means of the trapezoidal rule gives the following equations 2𝐶 (𝜐 (𝑡) − 𝜐𝑚 (𝑡)) + 𝐼𝑘,𝑚 (𝑡 − ∆𝑡) ∆𝑡 𝑘 2𝐶 𝐼𝑘,𝑚 (𝑡 − ∆𝑡) = −𝑖𝑘,𝑚 (𝑡 − ∆𝑡) − (𝜐 (𝑡 − ∆𝑡) − 𝜐𝑚 (𝑡 − ∆𝑡) ∆𝑡 𝑘 𝑖𝑘,𝑚 (𝑡) = For a single-phase lossless line between the terminals k and m, the following equation must be true. 𝑢𝑚 (𝑡 − 𝜏) + 𝑍𝑖𝑚,𝑘 (𝑡 − 𝜏) = 𝑢𝑘 (𝑡) − 𝑍𝑖𝑘,𝑚 (𝑡) Where 𝜏 is the travel time (s) and Z the characteristic impedance (Ω). In words, the expression 𝑢 = 𝑍𝑖 encountered by an observer when he leaves the terminal m at time 𝑡 − 𝜏 must still be the same when he arrives at terminal k at time 𝑡 From Equation (5.5), the following two-port equations can be deduced. 𝑢𝑘 (𝑡) + 𝐼𝑘 (𝑡 − 𝜏) 𝑍 𝑢𝑚 (𝑡 − 𝜏) 𝐼𝑘 (𝑡 − 𝜏) = − − 𝑖𝑚,𝑘 (𝑡 − 𝜏) 𝑍 𝑢𝑚 (𝑡) 𝑖𝑚,𝑘 (𝑡) = + 𝐼𝑚 (𝑡 − 𝜏) 𝑍 𝑢𝑘 (𝑡 − 𝜏) 𝐼𝑚 (𝑡 − 𝜏) = − − 𝑖𝑘,𝑚 (𝑡 − 𝜏) 𝑍 The resulting models for the inductance, capacitance, and the lossless line are shown in Figure 5.1. They consist of current sources, which are determined by current values from previous time steps, and resistances in parallel. 𝑖𝑘,𝑚 (𝑡) = Figure 5.1 EMTP representation of an inductance, capacitance, and a lossless line by current sources and parallel resistances. ∆t is the step size of the computation. τ is the travel time of the line. Z is the characteristic impedance of the line. Figure 5.2 Sample RLC circuit. Figure 5.3 Equivalent EMTP circuit. Thus a network can be built up of current sources and resistances by using the equivalent circuits as shown in Figure 5.1. This approach will be demonstrated on the sample RLC network that is shown in Figure 5.2. By means of the equivalent models for the inductance and the capacitance, as depicted in Figure 5.1, and the replacement of the voltage source and the series impedance by a current source with a parallel resistance, the RLC circuit can be converted into the equivalent circuit as shown in Figure 5.3. To compute the unknown node voltages, a set of equations is formulated by using the nodal analysis (NA) method. 1 ∆𝑡 + [𝑅 2𝐿 ∆𝑡 − 2𝐿 −∆𝑡 𝑒(𝑡) 0 𝐼𝐿 (𝑡 − ∆𝑡) 2𝐿 ] [𝑢1 (𝑡)] = [ 𝑅 ] − [𝐼 (𝑡 − ∆𝑡) 𝐼 (𝑡 − ∆𝑡)] ∆𝑡 2𝐶 𝑢2 (𝑡) 𝐶 𝐿 0 + 2𝐿 ∆𝑡 In general, the following equations hold 𝒀𝒖 = 𝒊 − 𝑰 Y is the nodal admittance matrix u is the vector with unknown node voltages 𝒊 is the vector with current sources I is the vector with current sources, that are determined by current values from previous time steps. The actual computation works as follows: • The building up and inversion of the Y-matrix. This step has to be taken only once. However, when switching occurs, this step has to be repeated while the topology of the network changes; • The time-step loop is entered and the vector of the right-hand side of Equation (5.8) is computed after a time step ∆𝑡; • The set of linear equations is solved by means of the inverted matrix Y and the vector with the nodal voltages u is known; and • The vector in the right-hand side of Equation (5.8) is computed for a time step ∆t further in time and we continue this procedure till we reach the final time. The advantages of the ‘Dommel–EMTP’ method, as described in the previous section, among others are: • simplicity (the network is reduced to a number of current sources and resistances of which the Ymatrix is easy to construct); and • robustness (the EMTP makes use of the trapezoidal rule, which is a numerically stable and robust integration routine). However, the method has some disadvantages too: • A voltage source poses a problem. This becomes clear from the sample RLC circuit; a small series resistance will result in an ill-conditioned Y-matrix (see Equation (5.7)); • It is difficult to change the computational step size dynamically during the calculation, the resistance values and the current sources should be recomputed at each change [see Equation (5.7)] that entails Y-matrix re-inversion. This is time-consuming for larger networks; and • The Y-matrix is ill-conditioned. The resistances in the representations of the capacitance and the inductance (see Figure 5.1 and Equation (5.7)) are treated oppositely with regard to the computational step size ∆𝑡. Thus if the computational step size is decreased, it has a contrary effect on the inductances and capacitances. This can lead to numerical instabilities. The arc models within the EMTP are implemented by means of the compensation method. The nonlinear elements are essentially simulated as current injections, which are superimposed on the linear network, after a solution without the nonlinear elements has been computed first. The procedure is as follows: the nonlinear element is open-circuited and the Thevenin voltage and Thevenin impedance are computed. Now, the two following equations have to be satisfied. Firstly, the equation of the linear part of the network (the instantaneous Thevenin equivalent circuit as seen from the arc model). 𝑉𝑡ℎ − 𝑖𝑅𝑡ℎ = 𝑖𝑅 𝑉𝑡ℎ is the Thevenin (open-circuit) voltage (V) 𝑅𝑡ℎ is the Thevenin impedance (Ω) 𝑖 is the arc current (A) R is the arc resistance (Ω) Secondly, the relationship of the nonlinear element itself. Application of the trapezoidal method of integration yields for the arc resistance at the simulation time 𝑡: 𝑅(𝑡) = 𝑅(𝑡 − ∆𝑡) + ∆𝑡 𝑑𝑅 𝑑𝑅 ( |𝑡 + | 𝑡 − ∆𝑡) 2 𝑑𝑡 𝑑𝑡 ∆𝑡 is the time step (s) The 𝑑𝑅⁄𝑑𝑡 is described by the differential equation of the arc model. To find a simultaneous solution of Equation (5.9) and Equation (5.10), the equations have to be solved by means of an iterative process (e.g. Newton–Raphson). Therefore the solution process is as follows: • The node voltages are computed without the nonlinear branch, • Equation (5.9) and Equation (5.10) are solved iteratively, and • The final solution is found by superimposing the response to the current injection 𝑖. 5.2 THE MATLAB POWER SYSTEM BLOCKSET After the introduction of the power system block set (PSB), for modelling and simulating electric power systems within the MATLAB Simulink environment, the general-purpose mathematical program MATLAB is a suitable aid for the simulation of power system transients. The Power System Blockset is developed at TEQSIM Inc. and Hydro-Quebec. Simulink is a software package for modelling, simulating, and analysing dynamic systems. It provides a graphical user interface for building models as block diagrams. The PSB block library contains Simulink blocks that represent common components and devices found in electrical power networks. The measurement blocks and the controlled sources in the PSB block library act as links between electrical signals (voltages across elements and currents flowing through lines) and Simulink blocks (transfer functions) and vice versa respectively. Simulink is based on the interconnection of blocks to build up a system. Each block has three general elements: a vector of inputs u, a vector of outputs y, and a vector of state variables x (Figure 5.4). Before the computation, the system is initialised; the blocks are sorted in the order in which they need to be updated. Then by means of numerical integration with one of the implemented ODE (ordinary differential equation) solvers, the system is simulated. The computation consists of the following steps: • The block output is computed in the correct order; • The block calculates the derivatives of its states based on the current time, the inputs, and the states; and • The derivative vector is used by the solver to compute a new state vector for the next time step. These steps continue until the final simulation time is reached. The PSB block library contains Simulink blocks that represent common components and devices found in electrical power networks. Therefore systems can be built up, consisting of both Simulink and PSB blocks. Figure 5.4 Simulink Block However, the measurement blocks and the controlled sources in the PSB block library act as links between electrical signals (voltages across elements and currents flowing through lines) and Simulink blocks (transfer functions) and vice versa respectively. Before the computation, the system is initialised; the state-space model of the electric circuit is computed, and the equivalent Simulink system is built up. The computation itself is analogous to the previously mentioned Simulink computational process. Figure 5.5 Sample RLC circuit in the MATLAB PSB The sample RLC circuit, previously used in this chapter, built up in the PSB is shown in Figure 5.5. It is important to note that the arrows in the diagram do not indicate causality, as is the case in the Simulink block diagrams. The state space model of this sample circuit is described in the following text. 𝑅 𝑥̇ = [ 𝐿 1 𝐶 − 1 1 𝐿] 𝑥 + [ ] 𝑉 𝐿 𝑎𝑐 0 0 − with 𝑥=[ 𝑖𝐿 ] 𝑢𝐶 MATLAB contains a large number of ODE solvers, some with fixed and others with variable step size. The ode15s solver, which can be used to solve stiff systems, is a variable order solver based on the numerical differentiation formulas (NDF’s). These are more efficient than the BDF’s, though a couple of the higher-order formulas are somewhat less stable. 5.3 REPRESENTATION OF NETWORK ELEMENTS WHEN CALCULATING TRANSIENTS Power system analysis is a broad subject. An interesting aspect of power systems is that the modeling of the system depends on the time scale that is being viewed. Accordingly, the models for the power system components that are used for 50 or 60 Hz steady state analysis have a limited validity, they are only valid for low-frequency phenomena. In general, the time scales of interest are: • years, months, weeks, days, hours, minutes and seconds for steady-state analysis at power frequency (50 Hz or 60 Hz). The steady-state analysis covers a variety of topics such as: planning, design, economic optimization, load flow power flow computations, fault calculations, state estimation, protection, stability and control. • milliseconds for dynamic analysis (kHz). The dynamic behavior of electric networks and their components is important in order to predict whether the system, or a part of the system, remains in a stable state after a disturbance. The ability of a power system to maintain stability depends heavily on the controls in the system to damp the electromechanical oscillations of the synchronous generators. • microseconds for transient analysis (MHz). The transient analysis is of importance when we want to gain insight in the effect of switching actions, e.g. when connecting or disconnecting loads or switching off faulted sections, or in the effect of atmospheric disturbances, such as lightning strokes, and the accompanying over voltages and over currents in the system and its components. Although the power system itself remains unchanged when different time scales are considered, the components in the power system should be modeled in accordance with the appropriate time frame. An illustrating example is the modeling of an overhead transmission line. For steady-state computations at power frequency the wavelength of the sinusoidal voltages and currents is 6000 km (in case of 50 Hz): 𝜆= 𝜐 3 . 105 = = 6000 km 𝑓 50 λ the wave length [km] v the speed of light 300000 [km/s] f the frequency [Hz = 1/s] Thus, the transmission line is so to speak of ‘electrically small’ dimensions compared to the wavelength of the voltage. The Maxwell equations can therefore be approximated by a quasistatic approach and the transmission line can accurately be modeled by lumped elements. Kirchhoff’s laws can be fruitfully used to compute the voltages and currents. When the effects of a lightning stroke have to be analyzed, frequencies of 1 MHz and higher occur and the typical wavelength of the voltage and current waves is 300 m or less. In this case the transmission line is far from being ‘electrically small’ and it is not allowed to use the lumpedelement representation any more. The distributed nature of the transmission line has to be 𝑡𝑎𝑘𝑒𝑛 𝑖𝑛𝑡𝑜 𝑎𝑐𝑐𝑜𝑢𝑛𝑡 𝑎𝑛𝑑 𝑤𝑒 ℎ𝑎𝑣𝑒 𝑡𝑜 𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑡𝑒 𝑤𝑖𝑡ℎ 𝑡𝑟𝑎𝑣𝑒𝑙𝑙𝑖𝑛𝑔 𝑤𝑎𝑣𝑒𝑠. Despite the fact that we mainly use lumped-element models inmodeling, it is important to realize that the energy is mainly stored in the electromagnetic fields surrounding the conductors and nearly not in the conductors themselves as is shown in figure 5.6. The Poynting vector, being the outer product of the electric field intensity vector and the magnetic field intensity vector, indicates the direction and the intensity of the electromagnetic power flow: Figure 5.6 Transmission line - transformer - transmission line - load: the energy is stored in the electromagnetic field 𝑺=𝑬×𝑯 S is the Poynting vector [W/𝑚2 ] E is the electric field intensity vector [V/m] H is the magnetic field intensity vector [A/m] Due to the finite conductivity of the conductor material and the finite permeability of the transformer core material, a small electric field component is present inside the conductor and a small magnetic field component results in the transformer core: 𝑬= J is the current density vector [A/𝑚2 ] 𝜎 is the conductivity [S/m] 𝑱 𝜎 𝑩 𝜇 B is the magnetic flux density vector [T = AH/𝑚2 ] 𝜇 is the permeability [H/m] This leads to small Poynting vectors pointing towards the conductor and the transformer core: the losses in the transmission line and the transformer. 𝑯= The simulation of transient phenomena may require a representation of network components valid for a frequency range that varies from DC into the megahertz range. The objective is usually to provide wideband models for power system components, but an acceptable representation of each component throughout a wide frequency range is not easy and for most components it is not practically possible either because it results in computational inefficiency or requires more complex data, which are not readily available. Each range of frequencies usually corresponds to some particular transient phenomena. In one of the most accepted classifications, proposed by the International Electrotechnical Commission (IEC) and CIGRE, frequency ranges are classified into four groups: low-frequency oscillations (from 0.1 Hz–3 kHz) slow-front surges (from 50/60 Hz–20 kHz) fast-front surges (from 10 kHz–3 MHz), and very-fast-front surges (from 100 kHz–50 MHz) Several reports on modeling guidelines for time-domain digital simulations have been published during the last few years: The Technical Brochure Guidelines for Representation of Network Elements when Calculating Transients published by CIGRE WG (Working Group) 33-02 covers the most important power components and proposes the representation of each component, taking into account the frequency range of the transient phenomena to be simulated. The documents produced by the IEEE WG on Modeling and Analysis of System Transients Using Digital Programs and its task forces present modeling guidelines for several particular types of studies. The fourth part of the IEC standard 60071 (TR 60071-4) provides modeling guidelines for insulation coordination studies when using numerical simulation, e.g., EMTP-like tools. The part of the system to be modeled depends on the frequency range of the transients—the higher the frequencies, the smaller the zone. One should try to keep the part of the system to be represented as small as possible. Although computer programs allow representing very large networks through advanced graphical user interfaces, an increased number of components does not necessarily result in higher precision and in addition, a rather detailed representation of a part of the system will often result in a longer simulation time. Losses are difficult to model. Although there are cases where losses do not play a critical role, since their effect on maximum voltages and oscillation frequencies is rather limited, there are also situations for which losses are critical, for instance in defining the magnitude of overvoltages. Cases where losses are particularly important include Ferro-resonance, dynamic overvoltage conditions involving harmonic resonance, and capacitor bank switching. Losses can be caused in windings, cores, or in insulating material. Other sources of losses are corona in overhead lines and the losses in screens and sheaths in insulated cables. Losses are commonly represented using a circuit approach. In some situations, losses cannot be separated from electromagnetic fields: the skin effect is caused by the magnetic field constrained in windings and produces frequency-dependent winding losses; core losses depend on the peak magnetic flux and on the frequency of this field; corona losses play a role when the electric field exceeds the inception corona voltage; and insulation losses are caused by the electric field and show an almost linear behavior. Engineers and researchers spend only a small amount of their time running the simulations, most of the time is spent obtaining parameters for component models. In the case that one or more parameters cannot be determined accurate enough, a sensitivity study could be very practical since this shows whether these parameters are of concern or their influence is of secondary importance. REFERENCES FOR FURTHER READING Dommel, H. W., ‘‘Nonlinear and time-varying elements in digital simulation of electromagnetic transients’’ , IEEE T-PAS, 2561–2567 (1971). Gear, C. W., ‘‘Simultaneous numerical solutions of differential-algebraic equations,’’ IEEE Transactions on Circuit Theory, 18(1), 89–95 (1971) Opal, A. and Vlach, J., Consistent initial conditions of linear switched networks, IEEE Transactions on Circuits and Systems, CAS-37(3), 364–372 (1990). Phadke, A. G., Scott Meyer W., and Dommel, H. W., ‘‘Digital simulation of electrical transient phenomena’’ IEEE tutorial course, EHO 173-5-PWR, IEEE Service Center, Piscataway, New York, 1981. Phaniraj, V. and Phadke, A. G., ‘‘Modelling of circuit breakers in the electromagnetic transients program’’ Proceedings of PICA, 476–482 (1987). The Mathworks, Power System Blockset, for use with Simulink User’s Guide, Version 1, The Mathworks, Natick, Massachusetts, 1999. The Mathworks, Simulink, Dynamic System Simulation for MATLAB – Using Simulink, Version 3, The Mathworks, Natick, Massachusetts, 1999. Singhal, K. and Vlach, J., ‘‘Computations of time domain response by numerical inversion of the Laplace transform,’’ Journal of the Franklin Institute, 299(2), 109–126 (1975). Sybille, G. et al., ‘‘ Theory and Applications of Power System Blockset: a MATLAB/ Simulink-based simulation tool for power systems,’’ IEEE Winter Meeting, Singapore, January, 2000. Van der Sluis, L., Rutgers, W. R., and Koreman, C. G. A., ‘‘A physical arc model for the simulation of current zero behaviour of high-voltage circuit breakers,’’ IEEE Transactions on Power Delivery, 7(2), 1016–1022 (1992). Van der Sluis, L., ‘‘A network independent computer program for the computation of electrical transients, ’’ IEEE T-PRWD, 2, 779–784 (1987). CIGRE WG 33.02, “Guidelines for Representation of Network Elements when Calculating Transients, Cigre Brochure 39, 1990. IEC TR 60071-4, “Insulation Co-ordination-part 4: Computational Guide to Insulation Co-ordination and Modeling of Electrical Networks”, IEC, 2004. Juan A. Martinez-Velasco (editor) et al, “Power System Transients - Parameter Determination”, CRC-press 2010.