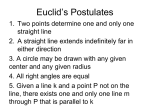
Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Tessellation wikipedia , lookup
List of regular polytopes and compounds wikipedia , lookup
Euler angles wikipedia , lookup
Dessin d'enfant wikipedia , lookup
Projective plane wikipedia , lookup
Conic section wikipedia , lookup
Cartan connection wikipedia , lookup
Trigonometric functions wikipedia , lookup
Möbius transformation wikipedia , lookup
History of trigonometry wikipedia , lookup
Pythagorean theorem wikipedia , lookup
Analytic geometry wikipedia , lookup
Geometrization conjecture wikipedia , lookup
Lie sphere geometry wikipedia , lookup
Multilateration wikipedia , lookup
Rational trigonometry wikipedia , lookup
History of geometry wikipedia , lookup
Duality (projective geometry) wikipedia , lookup
Cartesian coordinate system wikipedia , lookup
Euclidean space wikipedia , lookup
Hyperbolic geometry wikipedia , lookup
Chapter 3
Other Geometries
Prequel A Axioms for Neutral Geometry
Prequel B Revisiting the Four Point Geometry
3.1 The Concept of Parallelism
3.2 Points, Lines, and Curves in Poincare’s Model of Hyperbolic Space
3.3 Polygons in Hyperbolic Space
3.4 Congruence in Hyperbolic Space
Homework Chapter 3 on the website separately
1
The Axioms for Neutral Geometry
Undefined terms:
point, line, plane, space
Axioms:
A1
To each pair of points (A, B) is associated a unique real number, denoted AB,
with least upper bound,
What do the SMSG Axioms for Euclidean Geometry start with? Which SMSG A
matches this…how is it alike and how is it different?
SMSGA1. Given any two distinct points there is exactly one line that
contains them.
SMSGA2. The Distance Postulate: To every pair of distinct points there
corresponds a unique positive number. This number is called the
distance between the two points.
2
A2
For all points A and B, AB 0, with equality only when A = B.
Where is this in SMSG A? Why do we have this and A3, below
A3
For all points AB = BA.
A4
Given any four distinct collinear points A, B, C, and D such that
A – B – C, then either D – A – B, A – D – B, B – D – C, or B – C – D.
SMSG A?
3
A5
Each two points A and B lie on a line, and if AB < , that line is unique.
How is this different from SMSG A1?
SMSGA1. Given any two distinct points there is exactly one line that
contains them.
A6
Each three noncollinear points determine a plane.
SMSGA7. Any three points lie in at least one plane, and any three noncollinear points lie in exactly one plane.
4
A8
If two planes meet, their intersection is a line.
SMSGA8. If two planes intersect, then that intersection is a line.
A9
Space consists of at least four noncoplanar points, and contains three
noncollinear points. Each plane is a set of points of which at least three are
noncollinear, and each line is a set of at least two distinct points.
SMSGA5. A.
B.
Every plane contains at least three non-collinear points.
Space contains at least four non-coplanar points.
5
A10 (Ruler Postulate): Given line L and two points P and Q on L, the points of
L can be placed into one – to – one correspondence with the real numbers x such
that
x (called coordinates) in such a manner that
1. points P and Q have coordinates 0 and k > 0, respectively
2. if A and B on the line have coordinates a and b, then AB is
a b if
2 a b
a b
if
a b
SMSGA3. The Ruler Postulate: The points of a line can be placed in a
correspondence with the real numbers such that
A.
To every point of the line there corresponds exactly one real number.
B.
To every real number there corresponds exactly one point of the line,
and
C.
The distance between two distinct points is the absolute value of the
difference of the corresponding real numbers.
SMSGA4. The Ruler Placement Postulate: Given two points P and Q of a line,
the coordinate system can be chosen in such a way that the coordinate of P is
zero and the coordinate of Q is positive.
6
COORDINATES:
First in Euclidean Geometry
Coordinates
A close reading of SMSG Axiom 3 shows that in pure geometry we have one
number that specifies a point on a line, not two as in Cartesian Plane. We call this
number the geometric coordinate to distinguish it from the Cartesian coordinates of
a given point. We will spend some time exploring this notion.
We start with a horizontal number line in one dimension.
Identify points on the line with the real numbers A = 5, B = 1, C = 0, D = 3, and
E = 7. Note that each of these locations is specifically identified with exactly one
point that has one real number associated with it.
Now in order to calculate the distance from E to B, take the absolute value of the
difference of the real numbers in either order: 7 1 8 . Note that EB = BE
because we are using the absolute value of the difference. This is exactly what the
postulate stipulates.
This works perfectly well with vertical number lines, too. Try it with points Q = 12
and R = 5. QR = 5 12 = 12 5 . There’s no real difference between the
7
number lines except orientation. The horizontal line has slope = 0 and the vertical
line has an undefined slope.
When we combine the vertical number line and the horizontal number line,
intersecting them at the point 0 of each line, we have the structure to move into the
Cartesian plane and begin discussing coordinate geometry. NOTE THAT the
postulate applies to the lines we are looking at as axes AND to every other line in
the Cartesian Plane.
In fact, reading it closely shows that we must be able to find a real number for each
point on any line. (especially those with slopes that are any real number, m > 0).
Further, the axiom specifically states that each point on any line is associated with a
single real number that can be combined (absolute value of the difference) with the
single real number that is the coordinate of any other point on the line to get the
distance.
Happily there is a nice formula to work with that does for us this perfectly. To find
the geometric coordinate, take the x coordinate from the Cartesian coordinates and
multiply it times the square root of ( 1 + the slope squared).
Suppose we have a point P on the line y = mx + b and it’s coordinates are (s, q):
8
We take the x coordinate, s, and multiply it by 1 m 2 to get the real number we
will assign to P. If we do this with every point on the line, we will have individual
real numbers assigned to each point.
P = (s, q)
P = s 1 m2
The Cartesian coordinates for point P are (s, q) and
the geometric coordinate is s 1 m 2 .
If we work out the geometric coordinates of two points and if we take the absolute
value of the difference of these numbers we will have the distance between two
points on the line.
Example 1:
Suppose we have A = ( 1, 2) and B = ( 1, 6) and AB = 2 5 when we calculate the
distance using the Euclidean Distance Formula:
9
d ( x2 x1 )2 ( y2 y1 )2
The slope of the line containing A and B is found using the slope formula
m=
y 2 y1
so for this example m = 2. We need the factor
x 2 y1
1 m2
which is 5 .
The geometric coordinate for A is 1( 5) 5 and the geometric coordinate for B
is 5 (the x coordinate for B is 1).
The absolute value of the difference is 5 5 which is 2 5 as promised.
Example 2:
Suppose we take the line y = 3x + 1. If we pick two points on the line we can use
the distance formula to find the distance between them.
Let’s use ( 1, 4) and ( 3, 10). Using the traditional distance formula we find that the
distance between them is 40 2 10.
Now our axiom asserts that we can find a single real number for each point that can
be used and will result in this same distance.
Note, that 1 m 2 = 10 for this line.
10
Using the formula above the first point will be assigned the real number 1( 10 ) and
the second point will be assigned the real number 3 ( 10 ). The postulate says the
absolute value of the difference between these numbers is the distance between the
points.
Which is exactly 2 10 .
So this method is an easy way to find distances when you have the point
coordinates or the equation of the line. It does point out that a standard geometric
approach is slightly different that that of coordinate geometry or of algebra.
11
Example 3:
It is possible to get nice whole number distances if you use lines with irrational
slopes. For example:
The points (1, 0) and (0, 3 ) are on the line y 3 x 3 .
Here’s a sketch of the points and the line done in Math GV:
12
What are the geometric coordinates for the points and the distance between them?
1 m2 2 which is a very nice number
So the geometric coordinate for (1, 0) is 2
and the geometric coordinate for (0, 3 ) is 0
and the distance between the two points is 2 units.
Coordinate Exercise:
Find the geometric coordinates and the distance between the points (1, 2) and (3,
10),
Check your work using the Euclidean distance formula.
13
Application Exercise:
An application of this idea is to explore the following situation:
Two segments are said to be congruent segments if they have the same length.
Are the two segments defined by the following endpoints congruent?
Segment A has endpoints ( 5, 2) and (7, 2)
Segment B has endpoints (0, 5) and (12, 9)
Find the coordinates of each endpoint.
Get the distances:
14
What do these segments look like when graphed on the coordinate plane?
In the other 2 of the Big Three:
Hyperbolic and Spherical
We will learn about the formulas for the coordinates in these two geometries as we
work with them in the upcoming weeks!
One last look with an eye toward all 3 geometries. Let’s look at this “alpha”
A10 (Ruler Postulate): Given line L and two points P and Q on L, the points of
L can be placed into one – to – one correspondence with the real numbers x such
that
x (called coordinates) in such a manner that
1. points P and Q have coordinates 0 and k > 0, respectively
2. if A and B on the line have coordinates a and B, then AB is
a b if
2 a b
a b
if
a b
15
Appendix to Coordinates
Why Does the Geometric Coordinate Formula Work?
First take two points:
P1
( x1 , y1 )
P2
( x2 , y2 )
The formula for the line containing them is y = mx + b so the coordinates are really:
P1
( x1 , mx1 b)
P2
( x2 , mx2 b)
Now calculate the distance between them using the Euclidean distance formula:
( x2 x1 )2 (mx1 b (mx2 b))2
Distribute the minus sign in the second summand and the b’s cancel out:
( x2 x1 )2 (mx2 mx1 )2
16
Now, the “m” can be factored out, and then the difference of the x’s squared can be
factored out:
( x2 x1 ) 2 m 2 ( x2 x1 ) 2
( x2 x1 ) 2 (1 m 2 )
Take the square root of the first factor to get – note the POSITIVE square root,
guaranteed by absolute value signs:
x2 x1 ( 1 m2 )
This is, exactly, the formula we’re using in to meet the terms of A3.
17
A11
(Plane Separation Postulate): Let L be any line lying in any plane P.
The set of all points in P not on L consists of the union of two subsets
H1 and H2 of P such that
1. H1 and H2 are convex sets
2. H1 and H2 have no points in common
3. if A lies in H1 and B lies in H2 such that AB < ,
line L intersects segment AB .
SMSGA9. The Plane Separation Postulate: Given a line and a plane containing
it, the points of the plane that do not lie on the line form two sets such that
A.
each of the sets is convex, and
B. if P is in one set and Q is in the other, then segment PQ intersects the
line.
SMSGA10. The Space Separation Postulate: The points of space that do not line
in a given plane form two sets such that
A.
each of the sets is convex, and
B. if P is in one set and Q is in the other, then the segment PQ intersects
the plane.
18
A little bit on Convexity:
A set is called convex, if for every pair of points in the set, the points on the
segment joining them are also in the set.
Examples:
Circle:
Interior of a circle:
Planes:
19
A12 Each angle ABC is associated with a unique real number between 0 and
180 denoted m ABC. No angle can have measure 0 or 180
A13 (Angle Addition Postulate): If D lies in the interior of ABC, then
m ABD + m DBC = m ABC.
A14 (Protractor Postulate): The set of rays AX lying in a plane and on one side of
a given line AB , including ray AB , may be placed into one – to – one
correspondence with the real numbers x such that 0 x 180 (called
coordinates) in such a manner that
1. ray AB has coordinate 0
2. if rays AC and AD have coordinates c and d, then
m CAD = c d .
SMSGA11. The Angle Measurement Postulate: To every angle there
corresponds a real number between 0 and 180.
SMSGA12. The Angle Construction Postulate: Let ⃗⃗⃗⃗⃗
𝐴𝐵 be a ray on the edge of
the half-plane 𝐻. For every 𝑟 between 0 and 180 there is exactly one ray ⃗⃗⃗⃗⃗
𝐴𝑃
with 𝑃 in 𝐻 such that 𝑚∠𝑃𝐴𝐵 = 𝑟.
SMSGA13. The Angle Addition Postulate: If 𝐷 is a point in the interior of
∠𝐵𝐴𝐶, then 𝑚∠𝐵𝐴𝐶 = 𝑚∠𝐵𝐴𝐷 + 𝑚∠𝐷𝐴𝐶.
A15 (Linear Pair Axiom): A linear pair of angles is a supplementary pair.
SMSGA14. The Supplement Postulate: If two angles form a linear pair, then they
are supplementary
20
A16 (SAS Postulate): If two sides and the included angle of one triangle are
congruent, respectively, to two sides and the included angle of another, the
triangles are congruent.
SMSGA15. The SAS Postulate: Given an one-to-one correspondence between
two triangles (or between a triangle and itself). If two sides and the included
angle of the first triangle are congruent to the corresponding parts of the
second triangle, then the correspondence is a congruence.
Full stop. Now we have to make a choice about parallelism!
21
The SMSG Axioms for Euclidean Geometry – A categorical system
A1. Given any two distinct points there is exactly one line that contains
them.
A2.
The Distance Postulate: To every pair of distinct points there corresponds a
unique positive number. This number is called the distance between the two
points.
A3.
The Ruler Postulate: The points of a line can be placed in a correspondence
with the real numbers such that
A.
To every point of the line there corresponds exactly one real number.
B.
To every real number there corresponds exactly one point of the line,
and
C.
The distance between two distinct points is the absolute value of the
difference of the corresponding real numbers.
A4.
The Ruler Placement Postulate: Given two points P and Q of a line, the
coordinate system can be chosen in such a way that the coordinate of P is
zero and the coordinate of Q is positive.
A5.
A.
B.
A6.
If two points line in a plane, then the line containing these points lies in
the same plane.
A7.
Any three points lie in at least one plane, and any three non-collinear
points lie in exactly one plane.
A8.
If two planes intersect, then that intersection is a line.
A9.
The Plane Separation Postulate: Given a line and a plane containing it, the
points of the plane that do not lie on the line form two sets such that
A.
each of the sets is convex, and
B. if P is in one set and Q is in the other, then segment PQ intersects the
Every plane contains at least three non-collinear points.
Space contains at least four non-coplanar points.
line.
22
A10. The Space Separation Postulate: The points of space that do not line in a
given plane form two sets such that
A.
each of the sets is convex, and
B. if P is in one set and Q is in the other, then the segment PQ intersects
the plane.
A11. The Angle Measurement Postulate: To every angle there corresponds a real
number between 0 and 180.
A12. The Angle Construction Postulate: Let ⃗⃗⃗⃗⃗
𝐴𝐵 be a ray on the edge of the halfplane 𝐻. For every 𝑟 between 0 and 180 there is exactly one ray ⃗⃗⃗⃗⃗
𝐴𝑃 with 𝑃
in 𝐻 such that 𝑚∠𝑃𝐴𝐵 = 𝑟.
A13. The Angle Addition Postulate: If 𝐷 is a point in the interior of ∠𝐵𝐴𝐶, then
𝑚∠𝐵𝐴𝐶 = 𝑚∠𝐵𝐴𝐷 + 𝑚∠𝐷𝐴𝐶.
A14. The Supplement Postulate: If two angles form a linear pair, then they are
supplementary
A15. The SAS Postulate: Given an one-to-one correspondence between two
triangles (or between a triangle and itself). If two sides and the included
angle of the first triangle are congruent to the corresponding parts of the
second triangle, then the correspondence is a congruence.
Neutral axioms stop here!
A16 The Parallel Postulate: Through a given external point there is at most one
line parallel to a given line.
A17. To every polygonal region there corresponds a unique positive number
called its area.
A18. If two triangles are congruent, then the triangular regions have the same
area.
23
A19. Suppose that the region R is the union of two regions R1 and R2. If R1
and R2 intersect at most in a finite number of segments and points, then
the area of R is the sum of the areas of R1 and R2.
A20. The area of a rectangle is the product of the length of its base and the
length of its altitude.
A21. The volume of a rectangular parallelpiped is equal to the product of the
length of its altitude and the area of its base.
A22. Cavalieri’s Principal: Given two solids and a plane. If for every plane that
intersects the solids and is parallel to the given plane, the two intersections
determine regions that have the same area, then the two solids have the same
volume.
Revisiting The Four Point Geometry
Undefined terms
Axioms
point, line, on
A1
There are exactly four points.
A2
Any two distinct points have exactly one line on both of
them.
A3
Each line is on exactly two points.
Models –
24
Possible Definitions:
Parallel lines – what about parallel lines here:
Collinear points
Theorems
1. The four point geometry has exactly 6 lines.
2. Each point of the geometry has exactly 3 lines on it.
3.1
The Concept of Parallelism
We’ve seen many examples of parallelism from earlier in the semester:
no parallel lines
in the 3 Point Geometry and Spherical Geometry
to Playfair’s setup: …”exactly one line through the point parallel”
to “…several lines through the point parallel” in the 6 Point Geometry and in the
Klein Disc.
In the Big Three:
Euclidean is the “exactly one”
Hyperbolic is the “many”
Spherical is the “none”
Now let’s discuss triangles. All three have them!
And the Tricotomy Law is hard at work on
25
the sum of the interior angles of a triangle.
Euclidean geometry:
= 180 degrees
Spherical geometry:
> 180 degrees
Hyperbolic geometry:
< 180 degrees
Let’s look at Spherical geometry:
We measure angles with a Euclidean protractor. Select the vertex and put the
protractor “center” there. Project the legs up into the plane tangent to the sphere at
the vertex and measure.
Let’s do that.
Now, did everybody get the SAME sum?
26
Did anybody get 270 degress?
This is very non-Euclidean, no?
Let’s look at Hyperbolic geometry with Sketchpad…
27
Saccheri – Legendre Theorem for interior angles states that the sum of the interior
angles of a triangle is less than or equal to 180 degrees. It is a theorem about HG
and EG, but not SG and was an historic breakthrough when it was proved.
Let’s look at a very important construct with a history:
Saccheri Quadrilateral
This is a quadrilateral with right angles at each base vertex and congruent upright
legs. And it is a geometric object in EACH of the Big Three. It exists in each of
the Big Three and has some properties that are the same in each and some
properties that are different in each.
It was first constructed in the early 1700’s by a Jesuit monk named Giovanni
Girolamo Saccheri in an effort to prove that one could derive the parallel postulate
from Euclid’s other four postulates. Of course, his attempts didn’t work all the
way. He did eliminate the possibility of Spherical Geometry, though using Euclid’s
axioms, not Neutral Geometry axioms (those came MUCH later on).
Here’s a picture of a Saccheri Quadrilateral
B
Summit
leg
A
C
leg
Base
BAD and CDA are right angles.
BA AD and CD AD
D
Thus we define a Saccheri Quadrilateral as a quadrilateral with 2 opposite sides
congruent and two adjacent right angles at the legs. One all encompassing phrase is
“biperpendicular quadrilateral”.
28
Note that we simply do not discuss the length of the summit or the measures of the
summit angles – that’s because those parts have different properties in each of the
“Big Three” geometries.
Here’s a summary of the properties of a Saccheri Quadrilateral in the 3 geometries:
Euclidean Geometry
Hyperbolic Geometry
Spherical Geometry
summit length = base
summit longer than
base
summit shorter than
base
summit angles = 90
summit angles are
acute
summit angles are
obtuse
In Euclidean geometry, a Saccheri Quadrilateral is called a rectangle.
Note the Trichotomy Law showing up in the summit base length and the measure of
the summit angles.
Lemma:
A Saccheri Quadrilateral is a convex polygon.
This is true in all three geometries.
29
Theorem : The summit angles of a Saccheri Quadrilateral are congruent.
Proof :
Let ABCD be a Saccheri Quadrilateral. Construct diagonals BD and AC
B
C
k
A
D
Now consider BAD and CDA) (this is called decomposing the SQ.
They are congruent by SAS.
This means that CAD is congruent to BDA by CPCF*. From properties of a
quadrilateral and the Angle Addition Postulate, we have the following equations
and we will subtract them:
mBAC + mCAD = 90
mBDA + mBDC = 90
Thus mBAC mBDC = 0 . So these are congruent.
We have also that BD CA by CPCF. Thus BDC is congruent to CAB by SAS.
This makes the summit angles congruent by CPCF.
*Congruent parts of congruent figures are congruent!
I find that this proof gives a good feel for how to work with Saccheri Quadrilaterals.
30
Saccheri was an Italian Jesuit priest whose grasp of logic was impeccable. His
work was complimented by the Englishman Lambert who also has a quadrilateral
named for him. The Lambert quadrilateral has 3 right angles and the measure of the
4th angle varies with the geometry it’s in.
Saccheri’s plan was to eliminate two of the possible cases for the summit angles of
a quadrilateral (obtuse and acute), thereby proving that Euclidean geometry was the
only true geometry. He failed at that, but he did eliminate the Hypothesis of the
Obtuse angle. This is because Spherical Geometry is quite different from
Hyperbolic and Euclidean. Unfortunately, and unknown to Saccheri, Hyperbolic
Geometry is a model for our axioms and it is the geometry that fulfills the
Hypothesis of the Acute Angle.
The Hypothesis of the Obtuse Angle is not valid in Absolute Geometry (Hyperbolic
and Euclidean). Absolute geometry groups HG and EG; Neutral groups all three.
There was a LOT of tidying that went on in the early 20th century on geometry.
We will look at the Triangle Associated with a Saccheri Quadrilateral to eliminate
the Hypothesis of the Obtuse Angle.
The construction is to take an arbitrary triangle and orient it base horizontally.
Pick the midpoints of the two non-horizontal legs and connect them with a segment.
Extend the segment to the left and right in such a way that the new endpoint is
beyond the vertex of the base on each side and then connect the base and the
extended segment with a perpendicular to the extended segment (ie “RAISE” and
not drop a perpendicular).
Here’s the illustration and a summary of what is given or true by construction:
ABC is arbitrary
AM = MB CN = NB
B’B B’C’ C’C B’C’
31
raise a perpendicular from A to B'C' and call the point of intersection D.
A
T3
T2
M
B'
N
C'
D
T1
T4
B
C
T1 T2 and T3 T4 because of AAS (right angle, vertical angle, half the side).
This makes BB’ CC’. Thus BB’C’C is a Saccheri Quadrilateral by definition –
it’s just upside down from the usual picture. I’ve used greek symbols for the
congruent angles in each; these are congruent by CPCF. (and
32
Now the sum of the interior angles of the triangle is less than or equal to 180 by the
Saccheri-Legendre Theorem..…true in Hyperbolic and Euclidean but NOT
Spherical.
ABC x 180
Note that A =
So mA + mB + mC 180, which with substitution and a little reorganizing
becomes mB + m + mC + m = x 180. Now mB + m S1 is the
measure of a summit angle and mC + m S2 is the measure of the other
summit angle.
So we have S1 + S2 180. Since we know that the summit angles of a Saccheri
Quadrilateral are congruent S1 = S2 = 90 and we have 2S = S1 + S2 180. So
S 90. Thus the summit angles are not obtuse.
Historical context matters here…
33
Another theorem:
Show that the summit length of a Saccheri Quadrilateral is greater than or
equal to the base length.
Proof
Let ABCD be a Saccheri Quadrilateral
D
C
B
A
This means that mA = m1 + m2 = 90 by definition. By properties of
quadrilaterals, point C is an element of intDAB.
By Saccheri-Legendre,
ABC 180 .
Which is to say that m2 + m3 + 90 180 so that m2 + m3 90.
Since m1 + m2 = 90, we know that m1 + m2 m2 + m3, thus
m1 m3.
In considering DAC and BCA, note that we have 1 and 3 enclosed by
congruent sides (they share the diagonal and the outer sides are legs of the Saccheri
Quadrilateral) and the measures of the angles are not equal. By the Hinge Theorem,
then, we have
DC AB.
34
Note that a refinement of the Saccheri Quadrilateral is the Lambert Quadrilateral.
A Lambert Quadrilateral has three right angles. You will find Lambert
Quadrilaterals near discussions of Saccheri Quadrilaterals.
Let’s discuss those summit angles again.
In EG, we have a rectangle:
What is the sum of the interior angles of a rectangle? How do you know?
Let’s look at a Saccheri Quadrilateral on a sphere:
What is the sum of the interior angles of a SQ in SG? How do you know?
35
Here’s a sketch of one in Hyperbolic geometry from Sketchpad:
What is the sum of the interior angles of a SQ in HG? How do you know?
36
3.2
Points, Lines, and Curves in Poincare’s Model of Hyperbolic Space
Points:
Euclidean: of the plane or of 3-space, the usual
Spherical:
{( x, y, z ) x 2 y 2 z 2 1}
surface points only
Embedded in 3-space, using the center (0, 0, 0) as a reference!
Using Euclidean planes tangent to the sphere to measure angles!
Hyperbolic: our model will be 2-dimensional, the Poincaré Disc
{( x, y ) x 2 y 2 1} . This is a slice of the 3-D interior of the unit circle
model.
Lines:
Euclidean: the usual
Spherical:
Great Circles, as opposed to circles on the surface
The intersection of the surface with a plane that contains the
center of the sphere. e.g. the equator or any Great circle through the
North pole and South pole…though any orientation of a GC is allowed
Hyperbolic: Orthogonal Circles to the (disallowed) Unit Circle.
A circle that is orthogonal to the given circle intersects it in two points and tangent
lines to each circle at the point of intersection are perpendicular. Note that
diameters of the disc are also lines in this space even though they don’t look like
arcs; each diameter is said to be an arc of a circle with a center at infinity.
Let’s look at how to find orthogonal circles to our unit circle.
We’ll take the center and radius form of the equation:
( x h)2 ( y k )2 r 2
And foil it out. Getting all the terms with variables on the left and all the constants
on the right, we have
37
x 2 y 2 2hx 2ky r 2 h2 k 2
We have another general form for a circle:
x 2 y 2 ax by c
By coefficient matching we find
a h
b k
c r 2 h2 k 2
Now let’s look at our unit circle and an orthogonal circle. Note that the radii are
perpendicular to one another at each intersection of the circles. Thus we have a
right triangle when we connect the circle centers.
x^2+y^2+ax+by=c
D (h, k)
r
x^2+y^2=1
O
1
P
38
OD 2 h2 k 2
By the Pythagorean Theorem, then,
h2 k 2 r 2 1
Note that
OD 2 OP 2 PD 2 r 2 1
OD
Now from above:
c r 2 h2 k 2
h2 k 2 r 2 c
So c 1
Now we see that we can use
x 2 y 2 ax by 1
to find orthogonal circles to the unit circle all day long!
With one point in the unit disc we’ll get one equation and with a second point in the
unit disc, we’ll get a second equation. Solve for a and b.*
*I am indebted to David C. Kay’s discussion in his excellent College Geometry,
second edition, pages 448 and 449 for this equation.
39
To show that two points determine a line:
You pick two points, A and B, from the interior of the Unit Circle and substitute
their Cartesian coordinates into x 2 y2 ax by 1 . You will get two equations
with two unknowns, a and b. If you solve the system, you will have an equation for
a circle that is orthogonal to the unit circle and includes points A and B. The arc of
this orthogonal circle determined by A and B is a line in the Hyperbolic geometry
of the Unit Disc.
For example, suppose you have the points (½, 0) and (½, ½). Let’s get the equation
of the orthogonal circle to the Unit Circle that contains these two points. If you
substitute the coordinates of the first point in the equation you get
1 1
a 1
4 2
a
5
2
Now substituting the coordinates of the second point and the value for a, you get
1 1 5 1
1
( ) b( ) 1
4 4 2 2
2
b
1
2
40
So our equation is
5
1
x 2 y 2 x y 1
2
2
5
1
5
(x ) 2 (y ) 2
4
4
8
Here’s a graph of this circle from Sketchpad. Note the perpendicular tangent lines
(you can draw these in – at both intersections).
fx =
1-x2
1.4
gx = - 1-x2
5
hx =
8
qx = -
- x-
5
8
- x-
5
4
5
4
2
+
2
+
1
1.2
4
1
1
4
0.8
0.6
0.4
0.2
-2.5
-2
-1.5
-1
-0.5
0.5
1
1.5
2
2.5
-0.2
-0.4
-0.6
-0.8
-1
-1.2
-1.4
41
Angles of Parallelism
page 104
Let’s look at a line and a point not on that line. First we’ll run a perpendicular
through the point to the line. Then we’ll run lines through the point that intersect
on the left…all the way over to the ONE asymptotically parallel line which
intersects our line at an omega point (a circle point). This is the left sensed parallel
to the line. The angle from the omega point to the point not on the line to the base
of the perpendicular is called an angle of parallelism.
The left and right angles of parallelism are congruent and acute.
The proofs of this are on pages 105 and 106.
In paper 2, select one of the proofs and explicate it as if you are teaching it to a
bright high school student. In the end you must make sure I know you know how
the prove works. Especially concentrate on answer the “why?” question.
42
Circles:
A circle is a locus of points equidistant from a given point, the center.
True in each of the Big Three.
You should be familiar with Euclidean circles.
Let’s look at Spherical circles first. When a plane intersects the surface of the
sphere and does NOT include the center of the sphere, it makes a circle not a line.
It becomes a matter of convenience to eliminate one of the TWO centers by
choosing the one that has the shorter radius. TWO?
For this we’ll need to discuss distance.
In Spherical geometry: d r where theta in in rads and is the measure of the
central angle subtended by the two points. Now, for us, except in the homework,
the radius is one (it is not ALWAYS one, though).
So what is the distance from (0, 1, 0) to (0, 0, 1)?
Where are these on the sphere?
Work it out. What is the 3D distance formula?
Where is the circle centered at the first point with a radius of this distance?
Where is the second center?
43
And from (
2 2
3 1
,
, 0) to ( , , 0)
2 2
2
2
Where are these on the sphere?
Where is the circle centered at the first point with a radius of this distance?
Where is the second center?
Now these are called antipodal points. Let’s talk a minute about them.
180 degrees apart. Every point has an antipodal
Circle centers.
Between A and B nonantipodal. Between A and B antipodal.
44
Now let’s look at Hyperbolic circles.
What do you see vs what do you know?
45
An artifact of the Hyperbolic distance formula. Let’s look at that for a few minutes.
Here’s line AB. How far is it from A to B. We’ll need the omega points at the ends
of the lines to make the calculation.
Poincaré Disk Model
Disk Controls
A
M
B
N
Measure the following distance in Euclidean Geometry:
AM
AN
BM
BN
46
You use these Euclidean measurements to calculate the Hyperbolic distance with a
formula:
AM BN
the Hdistance from A to B is ln
AN BM
AM BN
AN BM
is called the “cross product”.
The absolute value of the natural log of the “cross product” is a very clever way to
measure distances.
Let’s look at some consequences of this formula.
Poincaré Disk Model
Disk Controls
Euclidean distances
MA = 0.86 in.
BM = 2.07 in.
AN = 1.91 in.
BN = 0.69 in.
Hyperbolic distances
MA = 35.48
HDAB
MB = 37.37
ln
MABN
BMAN
= 1.89
NA = 36.38
NB = 33.50
EG AB = 1.25 in.
A
AB = 1.89
M
B
N
Here’s a picture with Hyperbolic distances on the left and Euclidean distances on
the right. The hyperbolic distances were measured using the hyperbolic distance
tool on the left and the Euclidean distances were measured using the Euclidean
distance tool on the top menu. On the right, the calculation for Hyperbolic
distance is shown. Remember that the calculation uses Euclidean distances. The
Hyperbolic tools do the calculation automatically for you.
47
In Euclidean Geometry the distance between points on a segment is fixed and
independent of location in the plane. In Hyperbolic Geometry, however, you have
an interesting stretching of calculated distances that depends on whether the points
are close to the center of the disc or close to the edge of the disc. Points can be the
SAME Euclidean distance apart and have different Hyperbolic distances depending
on their location in the disc. This is a function of the distance formula.
Here’s an illustration with two points that are .09 apart in Eucildean geometry and
located in two different spots in the disc. Note that the Hyperbolic distances are
different and the points are further apart out near the edge of the disc.
Poincaré Disk Model
Disk Controls
A
Euclidean Distance
AB = 0.09 in.
Hyperbolic distance
AB = 0.53
B
M
Euclidean distance
.09
Hyperbolic distance
.52
N
48
Poincaré Disk Model
Disk Controls
A
B
N
Euclidean Distance
AB = 0.09 in.
Hyperbolic distance
AB = 0.12
M
Euclidean distance
.09
Hyperbolic distance
.12
Notice that the Hyperbolic distance depends on WHERE you are in the disc. Points
that are the same Euclidean distance apart in different locations on the disc are
different Hyperbolic distances apart.
49
Let’s do a problem together to look at this situation:
We will use the Unit Circle, and the x-axis as our Hline. It’s a diameter: Great
circle with it’s center at infinity!
Poincaré Disk Model
Disk Controls
C1
(-1,0)
A
(1,0)
P. Disk Center
D
E
B
P. Disk
We will find the distance from D to E using the formula. I’ll do one as an example.
If D has the Cartesian coordinates (1/3, 0) and E has the Cartesian coordinates (3/5,
0), then they are 4/15 .267 apart in Euclidean Geometry.
DA EB
DA EB
The Hdistance from D to E is ln
= ln
DB EA
DB EA
DA is 4/3.
EB is 2/5.
DB is 2/3.
EA is 8/5.
50
Putting these together in the cross product:
4 2
3 51
2 8 2
3 5
And the absolute value of ln (.5) is approximately .69, the Hdistance.
Now, I’m going to give you 5 points. Fill in the following chart with both the
Euclidean Distances and the Hyperbolic Distances and draw a conclusion about
Hyperbolic Distance and location in the disc.
Points
Distances
P0
(0, 0)
NA
P1
(1/3, 0)
P0 to P1
P2
(3/5, 0)
P1 to P2
P3
(7/9, 0)
P2 to P3
P4
(15/17, 0)
P3 to P4
P5
(31/33, 0)
P4 to P5
Euclidean
d
Hyperbolic
d
What do you observe about the distances as you move further from the center of the
disc?
51
3.3
Polygons in Hyperbolic Space
We’ve looked at triangles and Saccheri quadrilaterals. Each of the Big Three has
polygons, of course.
The EXCESS of a Spherical triangle is Sum of the Int. Angles – 180 degrees.
The DEFECT of a Hyperbolic triangle is 180 degrees – Sum of the Int. Angles.
There is a Pythagorean Theorem in each of Spherical and Hyperbolic. In each
geometry it involves angle measures.
In Spherical, given the three angles measuring A, B, and C of a right triangle with
C being the right angle and R is the measure of the sphere’s radius:
cos(C / R) cos( A / R) cos( B / R)
In Hyperbolic, “cosh” is hyperbolic cosine.
cosh C cosh A cosh B
Note that if your hyperbolic angle measures are large, you will get approximately:
C A B log 2
Area of triangles:
In Spherical:
Area ( A B C ) R 2
In Hyperbolic:
R 2 ( A B C )
Note that all the formulas are based on angle measures! This means that if two
triangles have the same angle sum, then they have the same area.
In Hyperbolic geometry, there is a largest triangle. It has angle sum zero and an
area of 180 degrees. Can you guess which triangle this is?
It has 3 omega points as vertices!
52
LUNES!
A two-sided polygon exclusive to Spherical geometry.
Where do these show up?
The sides are congruent. The summit angles are congruent.
Area? A fraction of the surface area of the sphere. ( 4 r 2 )
Polygons in general:
Can we have 5 sided figures in each geometry? Let’s restrict ourselves to convex
figures here.
The sum of the interior angles of a convex polygon in EG is (n 2)(180) .
What is it for Hyperbolic?
What is it for Spherical?
53
3.4
Congruence in Hyperbolic Space
If 3 angles of one triangle are congruent respectively to 3 angles of a second
triangle the triangles are congruent…in SG and HG
How is this different than in EG?
What does it tell you about similarity?
Saccheri Quadrilaterals with congruent summits and summit angles are congruent.
Where is this true?
54
Let’s discuss some similarities between the Big Three:
55
And now some differences:
56