Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Relativistic quantum mechanics wikipedia , lookup
Hooke's law wikipedia , lookup
Wave packet wikipedia , lookup
Brownian motion wikipedia , lookup
Derivations of the Lorentz transformations wikipedia , lookup
Velocity-addition formula wikipedia , lookup
Specific impulse wikipedia , lookup
Fictitious force wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Classical mechanics wikipedia , lookup
Routhian mechanics wikipedia , lookup
Jerk (physics) wikipedia , lookup
Center of mass wikipedia , lookup
Mass versus weight wikipedia , lookup
Modified Newtonian dynamics wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Seismometer wikipedia , lookup
Centripetal force wikipedia , lookup
Classical central-force problem wikipedia , lookup
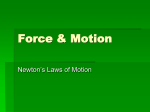
Notes on Terminal Velocity and Simple Harmonic Motion – Physics C Terminal Velocity When an object is subject to a constant forward force and a velocity-dependent drag force, it will accelerate (with decreasing acceleration) to a constant, terminal velocity. Consider an object such as a baseball falling through the air subject to a drag force of the form FR bv where b is a constant and v is the velocity of the ball. Applying Newton’s Second Law to this object, and substituting the definition of acceleration, we get mg bv ma dv dt mg m dv v b b dt Without going much farther, we can solve for the terminal velocity of the object. The terminal velocity occurs when the acceleration is zero and the upward resistance is equal to the downward mg gravity force. mg bvT and therefore vT . b mg bv m In order to solve for the velocity as a function of time, we use the method of separation of variables. First we get all the terms with v on one side and all the others on the other side dv bdt mg m v b Then we integrate both sides dv bdt mg m v b mg bt ln( v ) C b m where C is a constant that is determined by the initial conditions. At time t=0, v=0. Plugging this in, mg we get ln( ) C . Plugging this back in we get b mg mg bt ln( v ) ln( ) b b m mg mg bt ln( v ) ln( ) b b m mg v bt ln b mg m b mg bt v b e m mg b And thus the velocity as a function of time is mg v b bt 1 e m Graphing this as a function of time we get the following 1: To calculate the acceleration as a function of time, we simply take the derivative of the velocity function we derived above. kt dv d mg a 1 e m dt dt k a kt mg k 0 ( )e m k m a ge kt m At t=0, the acceleration is g, since the velocity is zero. This can be confirmed using Newton’s Second Law, mg-kv=ma, and mg-0=ma so therefore a=g at t=0. After a long time, the acceleration of the object is zero. It is important to help the students learn to plug in these limiting values to determine if their algebraic solution is correct. Simple Harmonic Motion Mass on a Spring The simplest case of simple harmonic motion is a mass m oscillating at the end of a horizontal spring of constant k. The normal force N and the weight W are equal and opposite so the net force on the block is F kx where x is the displacement of the mass from its equilibrium position. According to Newton’s Second Law (applied to the horizontal direction) 1 Image from Hyperphysics website. kx ma kx m d 2x dt 2 This differential equation has solutions that are of the form x (t ) A sin(t ) or x (t ) A cos(t ) . The method of solution that we use here is good old “guess and check.” According to the above differential equation, the solution must be of the form such that the second derivative is a negative constant times the original function: d 2x dt From our proposed solutions: 2 k x m d d x (t ) (A cos(t )) A sin(t ) dt dt d d a (t ) v (t ) ( A sin(t )) A 2 cos(t ) dt dt d 2x 2A cos(t ) 2x dt 2 v (t ) k . m The sinusoidal functions repeat every time the argument of the function cycles through 2 radians. 2 Thus, the period of the motion can be found using the relationship T=2. T . This tells us Comparing the original equation and our calculation of the second derivative, the constant 2 what the in the equation is related to. And from this relationship, we can derive an equation that tells us how the period relates to the mass of the block and the spring constant. k 2 m T 2 k m 2 T k m m k Simple Pendulum A simple pendulum is a point mass at the end of a string of length L. The analysis of the motion of a pendulum is very similar to that of mass on a spring. We start with Newton’s Second Law: mg sin( ) ma mg sin( ) m d 2x dt 2 The negative sign is due to the fact that if the object is displaced to the right, the acceleration will be to the left. For small angles , sin( ) and according to the x definition of the radian, where x is the arc length of the displacement of the pendulum, and L L is the length of the pendulum. 2 d x x Substituting this in we get mg m . With a little bit of algebraic manipulation, we come L dt 2 d 2x g x . This is in exactly the same format as the differential equation that L dt g describes the motion of a mass on the end of a spring. Thus, 2 in this case and therefore, L up with 2 T 2 L g Physical Pendulum A physical pendulum is any rigid object which oscillates with small amplitude about a pivot. Lcm is the distance from the pivot to the center of mass of the object. Its moment of inertia is I and its mass is m. We start the analysis of this problem from Newton’s Second Law for rotation: I . The only torque on the system is due to gravity: rF Lcm (mg sin ) Plugging this in to the above equation we obtain: mgLcm sin I mgLcm sin I d 2 dt 2 Again, substituting the small angle approximation sin( ) we get mgLcm I d 2 2 d 2 dt 2 mgLcm I dt Again, this equation is the in exactly the same format as the mass on the spring: the second mgLcm derivative is a negative constant times the original function. In this case, 2 and the I period of the motion is T 2 I mgLcm