The 1995 Robot Competition and Exhibition - David P. Miller
... UNM LOBOT is a custom-built mobile robot designed by UNM engineering students. The LOBOT is driven by a two-wheel differential configuration with supporting casters. It is octagonal in shape, stands about 75 centimeters tall, and measures about 60 centimeters in width. Sensing is achieved using a la ...
... UNM LOBOT is a custom-built mobile robot designed by UNM engineering students. The LOBOT is driven by a two-wheel differential configuration with supporting casters. It is octagonal in shape, stands about 75 centimeters tall, and measures about 60 centimeters in width. Sensing is achieved using a la ...

Increasing SIA Architecture Realism by
... often seen in crisis situations. In other words, increased anxiety contributes to a particular situation assessment (e.g., aircraft is being attacked by hostile aircraft), which then limits the processing of data that could give rise to alternative interpretations and further increases the anxiety l ...
... often seen in crisis situations. In other words, increased anxiety contributes to a particular situation assessment (e.g., aircraft is being attacked by hostile aircraft), which then limits the processing of data that could give rise to alternative interpretations and further increases the anxiety l ...

Neural Robot Detection in RoboCup
... After calculating the different features, they are passed to two artificial neural networks as can be seen in Figure 2. One network only processes the simple features, the input for the second one are the orientation histogram values. The breakdown into two networks turned out to be necessary in ord ...
... After calculating the different features, they are passed to two artificial neural networks as can be seen in Figure 2. One network only processes the simple features, the input for the second one are the orientation histogram values. The breakdown into two networks turned out to be necessary in ord ...

events:knowledge-workshop-iros2011:tikanmaki.pdf (340.2 KB)
... used for task planning, environment state progress prediction, etc. 2) Environment model An environment model forms a base for the robot’s task planning, navigation, obstacle avoidance, and for example human interaction. The model may also contain kinematic relations (like forces and masses), and it ...
... used for task planning, environment state progress prediction, etc. 2) Environment model An environment model forms a base for the robot’s task planning, navigation, obstacle avoidance, and for example human interaction. The model may also contain kinematic relations (like forces and masses), and it ...

ppt - LaDiSpe - Politecnico di Torino
... psychology arises from the brain & body physiology Embodiment theory was introduced into AI by Rodney Brooks in the ‘80s. Brooks have claimed that all autonomous agents need to be both embodied and situated The theory states that intelligent behavior emerges from the interplay between brain, bod ...
... psychology arises from the brain & body physiology Embodiment theory was introduced into AI by Rodney Brooks in the ‘80s. Brooks have claimed that all autonomous agents need to be both embodied and situated The theory states that intelligent behavior emerges from the interplay between brain, bod ...

Cognitive Decathlon
... In other cases, if the agent is being used to make predictive assessments of how a human would behave in a specific situation, verisimilitude would be a benefit as well. Finally, this criterion can provides some tests for how an agent processes information and reasons: for example, if one’s goal is ...
... In other cases, if the agent is being used to make predictive assessments of how a human would behave in a specific situation, verisimilitude would be a benefit as well. Finally, this criterion can provides some tests for how an agent processes information and reasons: for example, if one’s goal is ...

PPT
... world? • Single agent (vs. multi-agent): An agent operating by itself in an environment. Does the other agent interfere with my performance measure? ...
... world? • Single agent (vs. multi-agent): An agent operating by itself in an environment. Does the other agent interfere with my performance measure? ...

The Frankenstein Complex and Asimov`s Three Laws
... There are still problems, however, even with this more specific set. For example, the Procreation Law, stating that a robot cannot take part in the creation of another robot not subject to the laws, is of the least priority – subordinate to even the fourth law stating that a robot has to follow its ...
... There are still problems, however, even with this more specific set. For example, the Procreation Law, stating that a robot cannot take part in the creation of another robot not subject to the laws, is of the least priority – subordinate to even the fourth law stating that a robot has to follow its ...
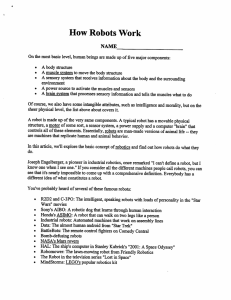
How Robots Work
... language and the ability to formulate original ideas. Roboticists are nowhere near achieving this level of artificial intelligence, but they have made a lot of progress with more limited AI. Today's AI machines can replicate some specific elements of intellectual ability. Computers can already solve ...
... language and the ability to formulate original ideas. Roboticists are nowhere near achieving this level of artificial intelligence, but they have made a lot of progress with more limited AI. Today's AI machines can replicate some specific elements of intellectual ability. Computers can already solve ...

A conversation with a 3D face - Dipartimento di Informatica
... questions; this opens a question-answering subdialog, after which Greta takes again the dialog control, by revising her discourse plan according to what occurred so far. As we said, we are particularly interested in simulating the ‘affective’ aspects of conversations; for this reason, we take medica ...
... questions; this opens a question-answering subdialog, after which Greta takes again the dialog control, by revising her discourse plan according to what occurred so far. As we said, we are particularly interested in simulating the ‘affective’ aspects of conversations; for this reason, we take medica ...

Stojanov
... Bickhard, which covers plethora of aspects related to mind and person. Within interactivism, an agent is regarded as an action system: an autonomous, selforganizing, self-maintaining entity, which can exercise actions and sense their effects in the environment it inhabits. In this paper, we will arg ...
... Bickhard, which covers plethora of aspects related to mind and person. Within interactivism, an agent is regarded as an action system: an autonomous, selforganizing, self-maintaining entity, which can exercise actions and sense their effects in the environment it inhabits. In this paper, we will arg ...

A Comparative Study of Soft Computing Methodologies in
... sulting in a hybrid system that both operates on linguistic descriptions of the variables and the numeric values through a parallel and fault tolerant architecture. The mapping properties of artificial neural networks have been analyzed by many researchers. Hornik [1], and Funahashi [2] have shown t ...
... sulting in a hybrid system that both operates on linguistic descriptions of the variables and the numeric values through a parallel and fault tolerant architecture. The mapping properties of artificial neural networks have been analyzed by many researchers. Hornik [1], and Funahashi [2] have shown t ...
Humanoid Robots That Behave, Speak, and Think Like Humans: A
... Machine-like intelligence may refer to the objective knowledge programmed into all modern day computing devices. Human-like intelligence is obtained relative to the “self” of the machine. Human-like intelligence is called subjective knowledge. The following are six pre-requisites required to achieve ...
... Machine-like intelligence may refer to the objective knowledge programmed into all modern day computing devices. Human-like intelligence is obtained relative to the “self” of the machine. Human-like intelligence is called subjective knowledge. The following are six pre-requisites required to achieve ...

A Case Study in Developmental Robotics
... a common one. For example, in an article (Barto et al., 1995) it was shown that majority of reinforcement learning (RL) algorithms are properly treated within the dynamic programming framework. RL methods which use dynamic programming as mathematical framework, require that environment be represente ...
... a common one. For example, in an article (Barto et al., 1995) it was shown that majority of reinforcement learning (RL) algorithms are properly treated within the dynamic programming framework. RL methods which use dynamic programming as mathematical framework, require that environment be represente ...
Communications of the ACM
... to manufacture a physical version of the evolved robot. Such an algorithm could, in principle, continually receive new desired behaviors and task environments and continuously generate novel robots. In this way, the roboticist can make fewer assumptions about the final form of the robot and have gre ...
... to manufacture a physical version of the evolved robot. Such an algorithm could, in principle, continually receive new desired behaviors and task environments and continuously generate novel robots. In this way, the roboticist can make fewer assumptions about the final form of the robot and have gre ...
Spoken dialogue technology achievements and challenges`` ( file)
... Examples of spoken dialogue systems Technical issues and challenges Future Prospects ...
... Examples of spoken dialogue systems Technical issues and challenges Future Prospects ...
A Behavior Analytic Paradigm for Adaptive Autonomous Agents
... repeatedly placed in the target situations, and the agent's behaviors are observed. The consequences are delivered to the agent (if the environment does not deliver them automatically). Complexity of the learned behaviors is limited, however, due to the sheer number of interactions with the environm ...
... repeatedly placed in the target situations, and the agent's behaviors are observed. The consequences are delivered to the agent (if the environment does not deliver them automatically). Complexity of the learned behaviors is limited, however, due to the sheer number of interactions with the environm ...

I Agents, Bodies, Constraints, Dynamics, and Evolution Alan K. Mackworth
... the opportunity to give the presidential address at AAAI-07 in Vancouver, my hometown. This article is based on that talk. That opportunity allowed me to step back and think of the big picture, the long perspective. The way to read the title, “Agents, Bodies, Constraints, Dynamics, and Evolution,” a ...
... the opportunity to give the presidential address at AAAI-07 in Vancouver, my hometown. This article is based on that talk. That opportunity allowed me to step back and think of the big picture, the long perspective. The way to read the title, “Agents, Bodies, Constraints, Dynamics, and Evolution,” a ...
CptS 440 / 540 Artificial Intelligence
... Weak AI Position • Machines can be made to act as if they were intelligent – There are things that computers cannot do, no matter how we program them – Certain ways of designing intelligent programs are bound to fail in the long run – The task of constructing the appropriate programs ...
... Weak AI Position • Machines can be made to act as if they were intelligent – There are things that computers cannot do, no matter how we program them – Certain ways of designing intelligent programs are bound to fail in the long run – The task of constructing the appropriate programs ...

References
... Some issues and problems Natural environment v ability to control variables e.g. test in classroom v. bring into laboratory Interference with participants - ethical issues * Should you use a method of teaching that you do not think is going to work on your participants? * Should everyone get the op ...
... Some issues and problems Natural environment v ability to control variables e.g. test in classroom v. bring into laboratory Interference with participants - ethical issues * Should you use a method of teaching that you do not think is going to work on your participants? * Should everyone get the op ...

Cooperative Mobile Robotics
... theories from such diverse disciplines as artificial intelligence, game theory/economics, theoretical biology, distributed computing/control, animal ethology and artificial life. ...
... theories from such diverse disciplines as artificial intelligence, game theory/economics, theoretical biology, distributed computing/control, animal ethology and artificial life. ...
The AAAI 2006 Mobile Robot Competition and
... (the difference in difficulty of the seven categories was accounted for by weighting each category with a predetermined factor). The audience interaction evaluation required conference attendees to interact with a robot and to fill out an evaluation form. The tasks were not tied to the seven categor ...
... (the difference in difficulty of the seven categories was accounted for by weighting each category with a predetermined factor). The audience interaction evaluation required conference attendees to interact with a robot and to fill out an evaluation form. The tasks were not tied to the seven categor ...
intelligent robots: the question of embodiment
... increase the accuracy of strictly structured, exacting, and continuous quantifications, is not the only possibility. This may only provide a digital solution to an analogue problem, and consequently suffers from ever increasing complexity. Physical embodiment necessitates the use of approximate sol ...
... increase the accuracy of strictly structured, exacting, and continuous quantifications, is not the only possibility. This may only provide a digital solution to an analogue problem, and consequently suffers from ever increasing complexity. Physical embodiment necessitates the use of approximate sol ...

A bayesian computer vision system for modeling human interactions
... recursively in a Bayesian framework to fit real behavioral data. This approach provides a rather straightforward and flexible technique to the design of priors, one that does not require strong analytical assumptions to be made about the form of the priors.1 In our experiments, we have found that by ...
... recursively in a Bayesian framework to fit real behavioral data. This approach provides a rather straightforward and flexible technique to the design of priors, one that does not require strong analytical assumptions to be made about the form of the priors.1 In our experiments, we have found that by ...
Comp 1017 Robots
... Why learn to program with Robots ? 1. Robots are becoming commercially viable – need developers 2. Serious promise of Artificial Intelligence – needs researchers ...
... Why learn to program with Robots ? 1. Robots are becoming commercially viable – need developers 2. Serious promise of Artificial Intelligence – needs researchers ...