2015_0001_Vision for Curie and soccer
... ‘Change Color’: change the color setting of each color patch ‘Set Color’: set the range of tolerance of each color ...
... ‘Change Color’: change the color setting of each color patch ‘Set Color’: set the range of tolerance of each color ...

Radial Basis Networks:
... • Consists of 3 layers (input, hidden, output) • Input layer made up of nodes that connect network to environment • At input of each neuron (hidden layer), distance between neuron center & input vector is calculated • Apply RBF (Gaussian bell function) to form output of the neurons. • Output layer i ...
... • Consists of 3 layers (input, hidden, output) • Input layer made up of nodes that connect network to environment • At input of each neuron (hidden layer), distance between neuron center & input vector is calculated • Apply RBF (Gaussian bell function) to form output of the neurons. • Output layer i ...

Knowledge Processing for Cognitive Robots
... which must certainly be considered in a domestic robot’s knowledge base if the robot is to adapt its own behavior to suit the needs at hand. Also for information obtained from noisy sensors, it is important that the uncertainty in these observations can be represented and, if several uncertain sourc ...
... which must certainly be considered in a domestic robot’s knowledge base if the robot is to adapt its own behavior to suit the needs at hand. Also for information obtained from noisy sensors, it is important that the uncertainty in these observations can be represented and, if several uncertain sourc ...

Applied ontologies and standards for service robots
... • The ontological engineering is a subdomain of knowledge engineering that studies the process of ontology development. • an ontology defines the terms and the relations of the basic vocabulary of a domain and the rules that show how combine terms and relations so as to extend the vocabulary. ...
... • The ontological engineering is a subdomain of knowledge engineering that studies the process of ontology development. • an ontology defines the terms and the relations of the basic vocabulary of a domain and the rules that show how combine terms and relations so as to extend the vocabulary. ...

Learning from Observations
... – They’re navigati onal robots - i.e. they move around in t heir environment. (As contrasted w ith e.g. w ith manipulatory robots.) – They are tu rtles: they have a chassis w ith tw o separately controllable w heels at the front, and a pivot w heel at the back. – They have a light sensor underneath, ...
... – They’re navigati onal robots - i.e. they move around in t heir environment. (As contrasted w ith e.g. w ith manipulatory robots.) – They are tu rtles: they have a chassis w ith tw o separately controllable w heels at the front, and a pivot w heel at the back. – They have a light sensor underneath, ...

Agency Systems
... the actual distributed manufacturing systems: autonomy (an agent can operate without the direct intervention of external entities, and has some kind of control over their behavior), co-operation (agents interact with other agents in order to achieve a common goal), reactivity and pro- activity (agen ...
... the actual distributed manufacturing systems: autonomy (an agent can operate without the direct intervention of external entities, and has some kind of control over their behavior), co-operation (agents interact with other agents in order to achieve a common goal), reactivity and pro- activity (agen ...

CHIME: Service-oriented Framework for Adaptive Web
... appropriate tools (applications or agents), which provide one or several corresponding problem-solving methods (PSMs). Each of these applications maintains additional information about the user-system interactions (e.g. in the form of tables with description of topology and initial probabilities of ...
... appropriate tools (applications or agents), which provide one or several corresponding problem-solving methods (PSMs). Each of these applications maintains additional information about the user-system interactions (e.g. in the form of tables with description of topology and initial probabilities of ...

Security_AccessControl
... Must be easy for most humans to pass Must be difficult or impossible for machines to pass ...
... Must be easy for most humans to pass Must be difficult or impossible for machines to pass ...

A Hierarchy of Reactive Behaviors Handles Complexity
... arranges reactive behaviors in a two-level hierarchy of control processes. Each elementary behavior in the lower level is divided into two modules: the activation dynamics which at every time step determines whether or not the behavior tries to influence actuators, and the target dynamics, that desc ...
... arranges reactive behaviors in a two-level hierarchy of control processes. Each elementary behavior in the lower level is divided into two modules: the activation dynamics which at every time step determines whether or not the behavior tries to influence actuators, and the target dynamics, that desc ...

here - FER
... a set of behaviours designed in advance, the learning of new behaviours online is often necessary to ensure the gradual improvement of the entire system’s performance [13]. Once again, the main issues that arise when considering a more offline approach are a dynamically changing, complex, and not en ...
... a set of behaviours designed in advance, the learning of new behaviours online is often necessary to ensure the gradual improvement of the entire system’s performance [13]. Once again, the main issues that arise when considering a more offline approach are a dynamically changing, complex, and not en ...

- CRISP Repository
... reasoning logically about medical dilemmas from moral principles to deterministic outcomes in Searle’s sense can only become humanoid if there is a trade-off with affective decisions, which by definition are intentional. The man in the Chinese Room should be capable of laughter and crying. In Pontie ...
... reasoning logically about medical dilemmas from moral principles to deterministic outcomes in Searle’s sense can only become humanoid if there is a trade-off with affective decisions, which by definition are intentional. The man in the Chinese Room should be capable of laughter and crying. In Pontie ...

Real Robots that Pass Human Tests of Self-Consciousness
... go into a nearby store and shoplift a candy bar for him, it wouldn’t really be you who steals the candy bar; rather, Black would be the blameworthy one; and this diagnosis presupposes self-consciousness, at least in some form. In addition, moral competence in a robot situated among humans clearly re ...
... go into a nearby store and shoplift a candy bar for him, it wouldn’t really be you who steals the candy bar; rather, Black would be the blameworthy one; and this diagnosis presupposes self-consciousness, at least in some form. In addition, moral competence in a robot situated among humans clearly re ...

Artificial Intelligence
... action that is expected to maximize its performance measure, given the evidence provided by the percept sequence and whatever built‐in knowledge the agent has. ...
... action that is expected to maximize its performance measure, given the evidence provided by the percept sequence and whatever built‐in knowledge the agent has. ...

Social Robots: Approaches and Conceptions in the Perspective of
... and cultural interfaces But what caused this rule of machines – from clocks to computers and robots? The simple answer would be: there are forces and facilities that the human can cope with only by delegating control to devices superior than man in some important functions. For example, long-term m ...
... and cultural interfaces But what caused this rule of machines – from clocks to computers and robots? The simple answer would be: there are forces and facilities that the human can cope with only by delegating control to devices superior than man in some important functions. For example, long-term m ...
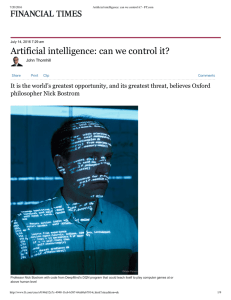
Artificial intelligence: can we control it?
... extremely prudent, though, to put in the work, in case it does turn out to be harder,” he says. “Whether the risk is 1 per cent, 80 per cent, or anywhere in between, it still makes sense to do some of the things I think should be done. The position is not sensitive to one’s level of optimism.” At th ...
... extremely prudent, though, to put in the work, in case it does turn out to be harder,” he says. “Whether the risk is 1 per cent, 80 per cent, or anywhere in between, it still makes sense to do some of the things I think should be done. The position is not sensitive to one’s level of optimism.” At th ...

The Usage and Evaluation of Anthropomorphic Form in Robot Design
... the “attribution of human characteristics to nonhuman things or events”. In terms of design, anthropomorphism can be applied to the form of an artifact. Form is not limited to static features such as shape and color. Form can also be related to dynamic features such as movement. Therefore, it is nec ...
... the “attribution of human characteristics to nonhuman things or events”. In terms of design, anthropomorphism can be applied to the form of an artifact. Form is not limited to static features such as shape and color. Form can also be related to dynamic features such as movement. Therefore, it is nec ...

MCS 8100/CSC 2114 : Artificial Intelligence
... An agent is an entity that perceives and acts This course is about designing rational agents Abstractly, an agent is a function from percept histories to actions: f : P∗ → A For any given class of environments and tasks, we seek the agent (or class of agents) with the best performance. ...
... An agent is an entity that perceives and acts This course is about designing rational agents Abstractly, an agent is a function from percept histories to actions: f : P∗ → A For any given class of environments and tasks, we seek the agent (or class of agents) with the best performance. ...

reja: a georeferenced hybrid recommender system for
... Due to the huge amount of information in the Web and in its services, such as sale or marketing processes, recently there have been developed different tools in order to provide users an easy, quick and suitable access to the information they require from the Web. Recommender systems have arisen in ...
... Due to the huge amount of information in the Web and in its services, such as sale or marketing processes, recently there have been developed different tools in order to provide users an easy, quick and suitable access to the information they require from the Web. Recommender systems have arisen in ...

astic Strategy act ead
... agent and discuss the impact of deliberation overhead on its performance.. In a contracting situation, an agent often faces many factors and tradeoffs. To find the best payment to offer, for example, a contractor needs to think about the potential contractees’ costs of doing the task, the payments o ...
... agent and discuss the impact of deliberation overhead on its performance.. In a contracting situation, an agent often faces many factors and tradeoffs. To find the best payment to offer, for example, a contractor needs to think about the potential contractees’ costs of doing the task, the payments o ...

as a PDF
... where required value of heating water is derived from value of external temperature. For observance of required temperature in heating elements most often takes care PI regulator that represents „low“ level of equithermic regulation. On the basis of external temperature is by heating line-determine ...
... where required value of heating water is derived from value of external temperature. For observance of required temperature in heating elements most often takes care PI regulator that represents „low“ level of equithermic regulation. On the basis of external temperature is by heating line-determine ...

www.cs.ubc.ca
... there is still much interest in the use of logic for high-level robotics (e.g., [Lespérance et al., 1994; Caines and Wang, 1995]), there seems to be an assumption that low-level ‘reactive’ control is inherently alogical. This paper challenges this assumption. This paper investigates the idea of usi ...
... there is still much interest in the use of logic for high-level robotics (e.g., [Lespérance et al., 1994; Caines and Wang, 1995]), there seems to be an assumption that low-level ‘reactive’ control is inherently alogical. This paper challenges this assumption. This paper investigates the idea of usi ...
KANTRA: Human-Machine Interaction for Intelligent Robots
... In the context of natural language access to the autonomous mobile robot KAMRO, many important applications are presented in the first part of the article: the interface can be used for the four main situations of human-machine interaction: task specification, execution monitoring, explanation of er ...
... In the context of natural language access to the autonomous mobile robot KAMRO, many important applications are presented in the first part of the article: the interface can be used for the four main situations of human-machine interaction: task specification, execution monitoring, explanation of er ...

Self-Adaptive Agents for Debugging Multi
... situations that do not occur in the original system. We call these Non-Valid Situations (NVS) for denoting the particular relation to producing valid simulations. They are not restricted to blocking situations as sketched in the beginning, but may also characterize discrepancies between simulated an ...
... situations that do not occur in the original system. We call these Non-Valid Situations (NVS) for denoting the particular relation to producing valid simulations. They are not restricted to blocking situations as sketched in the beginning, but may also characterize discrepancies between simulated an ...

Lecture 2: Intelligent Agents
... Properties of enviroments • A unknown and cluttered room with other agents in it is a more difficult place to live in than an empty room • A simple task in a simple environment means that we can get top performance out of a simple agent • A complex task in a complex environment requires a very soph ...
... Properties of enviroments • A unknown and cluttered room with other agents in it is a more difficult place to live in than an empty room • A simple task in a simple environment means that we can get top performance out of a simple agent • A complex task in a complex environment requires a very soph ...

Artificial Intelligence Techniques in
... components of an agent for traffic signalling. In addition to the fast loop of traffic control and feedback by the detectors, a slower loop for updating and improving the metamodels is also proposed in [Roozemond, 1999]. This once more shows that the selfadapting capabilities of AI-inspired algorith ...
... components of an agent for traffic signalling. In addition to the fast loop of traffic control and feedback by the detectors, a slower loop for updating and improving the metamodels is also proposed in [Roozemond, 1999]. This once more shows that the selfadapting capabilities of AI-inspired algorith ...