
Robotics and Artificial Intelligence: a Perspective on
... to be abandoned, and goals to be updated. These deliberation functions interact within a complex architecture (not depicted in Fig. 1) that will be discussed later. They are interfaced with the environment through the robot’s platform functions, i.e., devices offering sensing and actuating capabilit ...
... to be abandoned, and goals to be updated. These deliberation functions interact within a complex architecture (not depicted in Fig. 1) that will be discussed later. They are interfaced with the environment through the robot’s platform functions, i.e., devices offering sensing and actuating capabilit ...

Natural Language Interaction with Robots Alden Walker May 7, 2007
... and understanding at the same time poses a considerable task. Both are very sensitive and prone to error. Our goal is to use a very simple, pre-made robot and build a natural language processor on top of it which can handle the small subset of English which makes sense for commands and queries. By l ...
... and understanding at the same time poses a considerable task. Both are very sensitive and prone to error. Our goal is to use a very simple, pre-made robot and build a natural language processor on top of it which can handle the small subset of English which makes sense for commands and queries. By l ...

AI Techniques for Personalized Recommendation Tutorial
... have been and are currently being developed for the personalized recommendation of products, documents, or collaborators. Whereas previous tutorials have usually focused on one particular type of learning or inference technique, this tutorial will cover techniques ranging from all major extensions o ...
... have been and are currently being developed for the personalized recommendation of products, documents, or collaborators. Whereas previous tutorials have usually focused on one particular type of learning or inference technique, this tutorial will cover techniques ranging from all major extensions o ...

Instinctive Computing
... Yang Cai, Instinctive Computing, in book “Human Computing”, M. Pantic, etc.(eds), LNAI 4451, Springer, 2007 ...
... Yang Cai, Instinctive Computing, in book “Human Computing”, M. Pantic, etc.(eds), LNAI 4451, Springer, 2007 ...
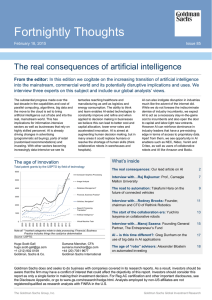
Fortnightly Thoughts
... Criteo, as well as users of collaborative robots and AI like Amazon and Baidu. ...
... Criteo, as well as users of collaborative robots and AI like Amazon and Baidu. ...

anthropomorphic interactions with a robot and robot–like agent
... Embodiment is not the same as presence. We are more engaged with real, embodied people than those who are projected even if they are not actually interacting with us (e.g., Schmitt, Gilovich, Goore, & Joseph, 1986). The human brain processes embodied structures differently than those that appear in ...
... Embodiment is not the same as presence. We are more engaged with real, embodied people than those who are projected even if they are not actually interacting with us (e.g., Schmitt, Gilovich, Goore, & Joseph, 1986). The human brain processes embodied structures differently than those that appear in ...

dfki.de/~jameson/aaai04-tutorial/personalized-recommendation-tutorial-description.pdf
... needs in commerce, information provision, and community services, whether on the web, through mobile interfaces, or through traditional desktop interfaces. This tutorial first reviews the types of personalized recommendation that are being used commercially and in research systems. It then systemati ...
... needs in commerce, information provision, and community services, whether on the web, through mobile interfaces, or through traditional desktop interfaces. This tutorial first reviews the types of personalized recommendation that are being used commercially and in research systems. It then systemati ...
Robotics
... Go is more difficult than chess for a machine because the game has less structure and the space of options is much larger. Koen Hindriks ...
... Go is more difficult than chess for a machine because the game has less structure and the space of options is much larger. Koen Hindriks ...
The Intelligent Conversational Humanoid Robot
... study of the mind and the way it works. For the purposes of cognitive science, artificial intelligence is defined as “ a codification of knowledge will finally explain intelligence” [2]. However, when it comes to engineering, the purpose of artificial intelligence is to use knowledge to solve real-w ...
... study of the mind and the way it works. For the purposes of cognitive science, artificial intelligence is defined as “ a codification of knowledge will finally explain intelligence” [2]. However, when it comes to engineering, the purpose of artificial intelligence is to use knowledge to solve real-w ...

38. Behavior-Based Systems - Server users.dimi.uniud.it
... biological notion of stimulus–response; it does not require the acquisition or maintenance of world models, as it does not rely on the types of complex reasoning processes utilized in deliberative control. Rather, rule-based methods involving a minimal amount of computation, and no internal represen ...
... biological notion of stimulus–response; it does not require the acquisition or maintenance of world models, as it does not rely on the types of complex reasoning processes utilized in deliberative control. Rather, rule-based methods involving a minimal amount of computation, and no internal represen ...

A Case-Based Approach To Imitation Learning in Robotic Agents
... demonstrated problem, it is not necessarily applicable to problems that vary more radically from the demonstrated problem. For example, if the robot is taught how to pour a mug, it may be able to apply its skill model for “pouring” to cases in which similar objects are used. However, this skill mode ...
... demonstrated problem, it is not necessarily applicable to problems that vary more radically from the demonstrated problem. For example, if the robot is taught how to pour a mug, it may be able to apply its skill model for “pouring” to cases in which similar objects are used. However, this skill mode ...

Out of control: How and why does perceived lack of control lead to
... (Fritsche et al., 2008). The present investigation is an attempt to shed light on the psychological mechanisms that mediate this effect when focusing on ethnocentrism and prejudice towards immigrants as dependent variables, which are varieties of ingroup bias. Based on Rothbaum et al.’s (1982) theor ...
... (Fritsche et al., 2008). The present investigation is an attempt to shed light on the psychological mechanisms that mediate this effect when focusing on ethnocentrism and prejudice towards immigrants as dependent variables, which are varieties of ingroup bias. Based on Rothbaum et al.’s (1982) theor ...

Behaviour as a Complex Adaptive System - laral
... be studied without taking into consideration the physical aspects of natural systems. In this new paradigm, researchers tend to stress (1) situatedness, i.e., the importance of studying systems that are situated in an environment (Brooks, 1991, Clark, 1997), (2) embodiment, i.e., the importance of s ...
... be studied without taking into consideration the physical aspects of natural systems. In this new paradigm, researchers tend to stress (1) situatedness, i.e., the importance of studying systems that are situated in an environment (Brooks, 1991, Clark, 1997), (2) embodiment, i.e., the importance of s ...

Managing the Machines
... Given data and something to predict, it is now much less costly to derive an accurate prediction. But of equal importance is what has happened to the value of prediction. Put simply, prediction has more value in a task if data is more widely available and accessible. The many decades-long improvemen ...
... Given data and something to predict, it is now much less costly to derive an accurate prediction. But of equal importance is what has happened to the value of prediction. Put simply, prediction has more value in a task if data is more widely available and accessible. The many decades-long improvemen ...

Reinforcement Learning and the Reward Engineering Principle
... agent’s rewards, then (as we later show formally) dominance relationships can arise between action policies for that agent. Policy A dominates policy B if no allowed assignment of rewards (as determined by the difficulties the operators face) causes the rewards expected from policy B to surpass thos ...
... agent’s rewards, then (as we later show formally) dominance relationships can arise between action policies for that agent. Policy A dominates policy B if no allowed assignment of rewards (as determined by the difficulties the operators face) causes the rewards expected from policy B to surpass thos ...

Beyond AI: Artificial Dreams
... AI was born as goal-oriented, problem-solving discipline and having a goal alone was seen as sufficient reason for performing an action. In other words, goals themselves were seen not only as a cause, but also as a purpose of certain action: no difference was perceived between having a goal and desi ...
... AI was born as goal-oriented, problem-solving discipline and having a goal alone was seen as sufficient reason for performing an action. In other words, goals themselves were seen not only as a cause, but also as a purpose of certain action: no difference was perceived between having a goal and desi ...

application of expert systems in wastewater treatment
... Introducing more stringent effluent standards causes that more advanced treatment processes must be used and that complexity of monitoring and control system is increasing. In such situations operators’ skills and professional expertise sometimes are not enough for optimal control of treatment proce ...
... Introducing more stringent effluent standards causes that more advanced treatment processes must be used and that complexity of monitoring and control system is increasing. In such situations operators’ skills and professional expertise sometimes are not enough for optimal control of treatment proce ...

pdf file
... Moreover, Agent Specific Task has the following two subcomponents: Process Analysis assesses the current state of the human, and Plan Determination determines whether action (intervention) has to be undertaken, and, if so, which ones. Finally, as in the model GAM, World Interaction Management and Ag ...
... Moreover, Agent Specific Task has the following two subcomponents: Process Analysis assesses the current state of the human, and Plan Determination determines whether action (intervention) has to be undertaken, and, if so, which ones. Finally, as in the model GAM, World Interaction Management and Ag ...

Human Computation: A Survey and Taxonomy of a
... in the context of related techniques and ideas. We give a set of dimensions that can be used to classify and compare existing human computation systems. We explain how to apply the system to identify open opportunities for future research in human computation. DEFINITION OF HUMAN COMPUTATION ...
... in the context of related techniques and ideas. We give a set of dimensions that can be used to classify and compare existing human computation systems. We explain how to apply the system to identify open opportunities for future research in human computation. DEFINITION OF HUMAN COMPUTATION ...

E-Proceedings - Machine Ethics and Machine Law
... which is discussed in this paper, is based on preparatory works by the scientist who already initiated the GOODBOT, a simple moral machine (Bendel 2013a). A business informatics student was contracted in early 2016 to implement the LIEBOT as a prototype in the scope of his graduation thesis, as an e ...
... which is discussed in this paper, is based on preparatory works by the scientist who already initiated the GOODBOT, a simple moral machine (Bendel 2013a). A business informatics student was contracted in early 2016 to implement the LIEBOT as a prototype in the scope of his graduation thesis, as an e ...

Anthropomorphism and the social robot
... with what has become well known as the Turing Test [9]. The test is based on whether a machine could trick a person into believing they were chatting with another person via computer or at least not be sure that it was “only” a machine. This approach is echoed in Minsky’s original 1968 definition of ...
... with what has become well known as the Turing Test [9]. The test is based on whether a machine could trick a person into believing they were chatting with another person via computer or at least not be sure that it was “only” a machine. This approach is echoed in Minsky’s original 1968 definition of ...
Towards Perceiving Robots as Humans: Three Handshake Models
... different strategies for optimizing success in the Prisoner's Dilemma game [47]. The proposed strategies were competed against each other in a tournament that revealed that the best strategy is when the players imitate each other’s actions from the previous iteration. The following algorithm employs ...
... different strategies for optimizing success in the Prisoner's Dilemma game [47]. The proposed strategies were competed against each other in a tournament that revealed that the best strategy is when the players imitate each other’s actions from the previous iteration. The following algorithm employs ...

Access Control
... You can always trust the information given to you by people who are crazy; they have an access to truth not available through regular channels. Sheila Ballantyne Part 2 Access Control ...
... You can always trust the information given to you by people who are crazy; they have an access to truth not available through regular channels. Sheila Ballantyne Part 2 Access Control ...

pdf
... principle of divide-and-conquer, progress was to be made through independent work on each of the competencies revealed through functional decomposition; these functional modules would eventually be combined into a complete intelligent system. Although it had appeared that this divide-and-conquer str ...
... principle of divide-and-conquer, progress was to be made through independent work on each of the competencies revealed through functional decomposition; these functional modules would eventually be combined into a complete intelligent system. Although it had appeared that this divide-and-conquer str ...

Biomechanical and neurophysiological mechanisms related to
... the development of an internal representation of body posture that is continuously updated based on multisensory feedback and is used to forward commands to control body position in space (Massion, 1994; Mergner & Rosemeier, 1998). This provides a basis for all interactions involving perception and ...
... the development of an internal representation of body posture that is continuously updated based on multisensory feedback and is used to forward commands to control body position in space (Massion, 1994; Mergner & Rosemeier, 1998). This provides a basis for all interactions involving perception and ...