
A Review of Case-Based Reasoning in Cognition
... that similar problems are likely to have similar solutions, which can be used to solve new similar problems. Two key indicators of CBR are context-sensitive representations coupling a concrete problem situation with a corresponding solution, and similarity-based search for reusable cases. Besides a ...
... that similar problems are likely to have similar solutions, which can be used to solve new similar problems. Two key indicators of CBR are context-sensitive representations coupling a concrete problem situation with a corresponding solution, and similarity-based search for reusable cases. Besides a ...

Blackwell Guide to the Philosophy of Computing and
... through computational models. Despite these similarities, there is an important difference between the modeling strategies artificial intelligence and artificial life typically employ. Most traditional AI models are top-down-specified serial systems involving a complicated, centralized controller th ...
... through computational models. Despite these similarities, there is an important difference between the modeling strategies artificial intelligence and artificial life typically employ. Most traditional AI models are top-down-specified serial systems involving a complicated, centralized controller th ...

Advances in conversational case-based reasoning
... In many case-based reasoning (CBR) applications, a complete description of the target problem is assumed to be available in advance. This is an unrealistic assumption in domains such as interactive fault diagnosis, where it is natural for users to provide only a brief initial description of the prob ...
... In many case-based reasoning (CBR) applications, a complete description of the target problem is assumed to be available in advance. This is an unrealistic assumption in domains such as interactive fault diagnosis, where it is natural for users to provide only a brief initial description of the prob ...
Robotics - Krupa Vara Prasad Adimulapu
... systems for their control, sensory feedback, and information processing. The design of a given robotic system will often incorporate principles of mechanical engineering, electronic engineering, and computer science (particularly artificial intelligence). The study of biological systems often plays ...
... systems for their control, sensory feedback, and information processing. The design of a given robotic system will often incorporate principles of mechanical engineering, electronic engineering, and computer science (particularly artificial intelligence). The study of biological systems often plays ...

Searching Social Networks
... who have the desired information or expertise. Finding them involves naturally depends on our social network: our friends, our friends’ friends, and so on. Clearly, building and maintaining a central repository of social relationships is not feasible: people usually cannot and, because of considerat ...
... who have the desired information or expertise. Finding them involves naturally depends on our social network: our friends, our friends’ friends, and so on. Clearly, building and maintaining a central repository of social relationships is not feasible: people usually cannot and, because of considerat ...

PDF file
... machine, which executes the task. Therefore, two phases are involved: the developmental phase and the performance phase, as illustrated in Fig. 2. In the developmental phase, a human engineer accepts a task that the machine is supposed to perform. He understands and analyzes the task before construc ...
... machine, which executes the task. Therefore, two phases are involved: the developmental phase and the performance phase, as illustrated in Fig. 2. In the developmental phase, a human engineer accepts a task that the machine is supposed to perform. He understands and analyzes the task before construc ...

Improving Adjustable Autonomy Strategies for Time
... Actions - The arrows in Figure 2 represent the actions that enable state transitions. However, now in the RIAACT model, much like the real world, actions do not take a fixed amount of time. Instead, each arrow also has a corresponding function which maps time to probability of completion at that poi ...
... Actions - The arrows in Figure 2 represent the actions that enable state transitions. However, now in the RIAACT model, much like the real world, actions do not take a fixed amount of time. Instead, each arrow also has a corresponding function which maps time to probability of completion at that poi ...

Goal-Based Action Priors - Humans to Robots Laboratory
... the agent prefers immediate rewards over future rewards (the agent prefers to maximize immediate rewards as γ decreases). MDPs may also include terminal states that cause all action to cease once reached (such as in goal-directed tasks). Goal-based action priors build on Object-Oriented MDPs (OO-MDP ...
... the agent prefers immediate rewards over future rewards (the agent prefers to maximize immediate rewards as γ decreases). MDPs may also include terminal states that cause all action to cease once reached (such as in goal-directed tasks). Goal-based action priors build on Object-Oriented MDPs (OO-MDP ...

Bodley_wsu_0251E_11404 - Washington State University
... work beginning as early as ten years ago, this dissertation never would have been possible. Dr. Thoma helped show me that strong voices should be encouraged, no matter how quiet they may seem. From Mr. Apperson I was reminded that the fantastic imagination in science fiction generates real science a ...
... work beginning as early as ten years ago, this dissertation never would have been possible. Dr. Thoma helped show me that strong voices should be encouraged, no matter how quiet they may seem. From Mr. Apperson I was reminded that the fantastic imagination in science fiction generates real science a ...

From Natural Language to Soft Computing: New Paradigms
... The most important objective reached during the workshop is that it opened the way for an interdisciplinary collaboration between researchers in different countries (Romania, USA, France, Serbia, Chile, Greece and Hungary), with different professional experience (scientific researchers, doctors and ...
... The most important objective reached during the workshop is that it opened the way for an interdisciplinary collaboration between researchers in different countries (Romania, USA, France, Serbia, Chile, Greece and Hungary), with different professional experience (scientific researchers, doctors and ...
Siri, a Virtual Personal Assistant Bringing Intelligence to the Interface
... control relevant task parameters, leave “tedious” details to underlying levels of control ...
... control relevant task parameters, leave “tedious” details to underlying levels of control ...

cs.cmu.edu - Stanford Artificial Intelligence Laboratory
... is how to assign tasks to individual robots and and best coordinate their behaviours. In loosely coupled domains, much success in task allocation has been achieved with both auction based approaches ([1], [2]) and behaviour based robotics ([3], [4]). For more tightly coupled domains in which robots ...
... is how to assign tasks to individual robots and and best coordinate their behaviours. In loosely coupled domains, much success in task allocation has been achieved with both auction based approaches ([1], [2]) and behaviour based robotics ([3], [4]). For more tightly coupled domains in which robots ...
Housekeeping with Multiple Autonomous Robots: Representation
... and a chair and the passage between the table and the chair is too narrow for the robot to pass through. • When a plan execution fails, the robots may need to find another plan by taking into account some temporal constraints. For instance, when a robot cannot move an object because it is heavy, the ...
... and a chair and the passage between the table and the chair is too narrow for the robot to pass through. • When a plan execution fails, the robots may need to find another plan by taking into account some temporal constraints. For instance, when a robot cannot move an object because it is heavy, the ...

Affordances for robots: a brief survey
... planning system; this intermediate ‘buffer’ can potentially become a disconnect between the real state of the environment and the agent’s beliefs. Second ly, plan failure is treated as an exception that is usually hand led by explicit re-planning. With the uncertainty and unpredictability inherent i ...
... planning system; this intermediate ‘buffer’ can potentially become a disconnect between the real state of the environment and the agent’s beliefs. Second ly, plan failure is treated as an exception that is usually hand led by explicit re-planning. With the uncertainty and unpredictability inherent i ...

A Neural Schema Architecture for Autonomous Robots
... involving adaptation and learning, sophisticated software architectures are required. The neural schema architecture provides such a system, supporting the development and execution of complex behaviors, or schemas [3][2], in a hierarchical and layered fashion [9] integrating with neural network pro ...
... involving adaptation and learning, sophisticated software architectures are required. The neural schema architecture provides such a system, supporting the development and execution of complex behaviors, or schemas [3][2], in a hierarchical and layered fashion [9] integrating with neural network pro ...

affordance - Aleksandra Derra
... A more recent formalization of this viewpoint is formulated by Şahin et al. (2007) and Ugur et al. (2009). They begin their formalization of affordances by observing that a specific interaction with the environment can be represented by a relation of the form (effect, (entity, behavior)), where the ...
... A more recent formalization of this viewpoint is formulated by Şahin et al. (2007) and Ugur et al. (2009). They begin their formalization of affordances by observing that a specific interaction with the environment can be represented by a relation of the form (effect, (entity, behavior)), where the ...
Aalborg Universitet The Meaning of Action
... 2. understand what effects certain actions have on the environment of the actor (recognizing the action by observing its effects on the environment) 3. understand how to physically perform a certain action in order to cause a particular change in the environment. While the first two points are commo ...
... 2. understand what effects certain actions have on the environment of the actor (recognizing the action by observing its effects on the environment) 3. understand how to physically perform a certain action in order to cause a particular change in the environment. While the first two points are commo ...
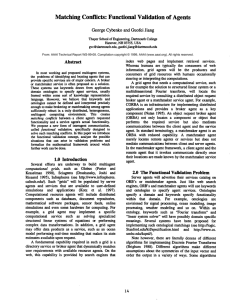
Matching Conflicts: Functional Validation of Agents
... on. The same is true of linear system solvers, other numerical algorithms and data products. In some complicated computationtasks, the possible situations are more challenging. For example, there are manydifferent system modeling algorithms developed for different control systems such as ARMX or ARM ...
... on. The same is true of linear system solvers, other numerical algorithms and data products. In some complicated computationtasks, the possible situations are more challenging. For example, there are manydifferent system modeling algorithms developed for different control systems such as ARMX or ARM ...
Future Computing and Robotics: A Report from the HBP Foresight Lab
... the organizations and institutions of our modern world are now widely recognised. Power stations, industry, urban food distribution, economic markets, our schools, hospitals, transportation networks, communication systems, and police, civil and military defence infrastructure are all in some way org ...
... the organizations and institutions of our modern world are now widely recognised. Power stations, industry, urban food distribution, economic markets, our schools, hospitals, transportation networks, communication systems, and police, civil and military defence infrastructure are all in some way org ...

word office version - European Parliament
... contractual terms, conclude contracts and decide whether and how to implement them make the traditional rules inapplicable, which highlights the need for new, efficient and up-to-date ones, which should comply with the technological development and the innovations recently arisen and used on the mar ...
... contractual terms, conclude contracts and decide whether and how to implement them make the traditional rules inapplicable, which highlights the need for new, efficient and up-to-date ones, which should comply with the technological development and the innovations recently arisen and used on the mar ...
Human-Robot-Communication and Machine Learning
... for deciding what to do next. They call their approach plan as communication (Agre and Chapman, 1990). Instead of de ning a sequence of xed and deterministic operators, plans just help to decide what's good to reach a given goal. Therefore, interpreting and executing a plan is more complex than in ...
... for deciding what to do next. They call their approach plan as communication (Agre and Chapman, 1990). Instead of de ning a sequence of xed and deterministic operators, plans just help to decide what's good to reach a given goal. Therefore, interpreting and executing a plan is more complex than in ...
The Evolution of Self-Esteem. In M. Kernis
... domains of same-sex dyadic alliances, coalitions, and kinships. Where self-assessed traits will be relevant to multiple adaptive domains, invoking entirely separate self-assessment mechanisms for each domain of self-esteem both lacks parsimony and entails postulating the existence of costly redundan ...
... domains of same-sex dyadic alliances, coalitions, and kinships. Where self-assessed traits will be relevant to multiple adaptive domains, invoking entirely separate self-assessment mechanisms for each domain of self-esteem both lacks parsimony and entails postulating the existence of costly redundan ...

Strategic Planning for Unreal Tournament© Bots
... Bots must react to an ever-changing environment. We advocate the use of HTN planning techniques to accomplish the goals of formulating a grand strategy and assigning tasks for the individual Bots to accomplish this strategy. At the same time we retain the event-driven programming of each individual ...
... Bots must react to an ever-changing environment. We advocate the use of HTN planning techniques to accomplish the goals of formulating a grand strategy and assigning tasks for the individual Bots to accomplish this strategy. At the same time we retain the event-driven programming of each individual ...

Part 2 - Simon Fraser University
... Limitations of reactive architectures • But also some drawbacks: – Agents must be able to map local knowledge to appropriate action – Impossible to take non-local (or long-term) information into account – If it works, how do we know why it works? The departure from “knowledge level” implies a loss ...
... Limitations of reactive architectures • But also some drawbacks: – Agents must be able to map local knowledge to appropriate action – Impossible to take non-local (or long-term) information into account – If it works, how do we know why it works? The departure from “knowledge level” implies a loss ...