Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Towards Cognitive Robotics
Christian Goerick
Honda Research Institute Europe GmbH
Patrick Emaase
Biointelligence Laboratory
School of Computer Science and Engineering
Seoul National University
http://bi.snu.ac.kr
Contents
1 Introduction
2 Towards an Architecture
3 Task and Body Oriented Motion Control
4 Visually and Behaviorally Oriented Learning
5
ALIS
– Autonomous Learning and Interactive
6 Conclusion
© 2015, SNU CSE Biointelligence Lab., http://bi.snu.ac.kr
2
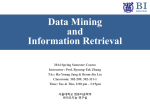
The Big Picture
Architecture
Vision, Behavior
ALIS
Cognitive
Robot
Schematics / Repre
How to realize Cognitve Robot
© 2015, SNU CSE Biointelligence Lab., http://bi.snu.ac.kr
3
Introduction
Long term goals
Create humanoid robot equipped with mechanisms for
learning and development – dynamically, robustly
Understand and re-create how human brain works
Research vehicle: Humanoid robot
PISA – Practical Intelligent Systems Architecture;
Architecture: Strategic Organization and
incremental systems
Major issue: Learning and adaptation – interaction with real world
© 2015, SNU CSE Biointelligence Lab., http://bi.snu.ac.kr
4
Towards an Architecture: PISA
Cognitive Robot
© 2015, SNU CSE Biointelligence Lab., http://bi.snu.ac.kr
Intelligent Behavior
Learn and reason
Achieves complex
goals
Acts, perceives,
plans, anticipates
5
Motion
© 2015, SNU CSE Biointelligence Lab., http://bi.snu.ac.kr
6
Task & Body Oriented Motion Control
Identify task accurately, move easily - complex
Have level of intelligence as humans & animals
control effectors for tasks easy
Have Body image – helps acting in complex task
Desirable cognitive architecture: able to cognitively
control relevant task parameters, leave “tedious”
details to underlying levels of control
© 2015, SNU CSE Biointelligence Lab., http://bi.snu.ac.kr
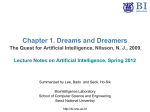
7
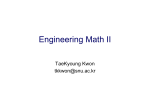
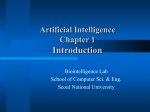
ASIMO Robot: Kinematics
Stable layer for motion control with motion interface has
been established – solve collision
Robot controlled by task level description, the coupling is
performed by whole body controller
Implements redundant control scheme considers all DoF at once
© 2015, SNU CSE Biointelligence Lab., http://bi.snu.ac.kr
8
Visually and Behaviorally Oriented
Learning
Goal: Provide Humanoid with Interactive behavior,
vision, adaptability
Autonomous development mechanisms
Interactive Learning mechanisms
Emphasis: Principled combination of both (A, IL)
Biologically motivated Interactive vision System
Adaptive basic behavior – can learn and recognize
© 2015, SNU CSE Biointelligence Lab., http://bi.snu.ac.kr
9
Active Vision System
Active: Recognizes images, re-plans view points
Determine new direction based on saliency + previous gaze direction
© 2015, SNU CSE Biointelligence Lab., http://bi.snu.ac.kr
10
Concept of space
Two types of space:
Peripersonal space establishes “Sharing Attention”
Peripersonal space and Extrapersonal space
User show object, system focus on shown entity
Addressed scientific concepts
Online learning
Internal homeostatic control system
Combination of both
© 2015, SNU CSE Biointelligence Lab., http://bi.snu.ac.kr
11
ALIS: Autonomous Learning and
Interacting System
Has incremental hierarchical system comprising
sensing and control elements
System interacts in real time with users
Architecture: hierarchical mimicking biological brain
© 2015, SNU CSE Biointelligence Lab., http://bi.snu.ac.kr
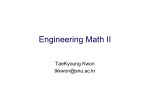
12
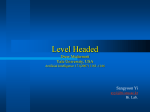
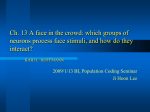
SYSTEMATICA
Framework SYSTEMATICA – For describing
incremental hierarchical control architecture
n is identifiable unit
X – full input space
D – dynamics
R – representations
B – behavior space
T – top-down info
P – priority
S – sensory space
M – motor commands
© 2015, SNU CSE Biointelligence Lab., http://bi.snu.ac.kr
13
SYSTEMATICA
Sensory Sn(X) and Behavior space Bn(X) split into
location and features aspects.
Framework characterizes architecture,
decomposes units n consisting of Sn(x), Dn, Bn, Rn,
Mn, Pn, Tm,n to allow system:
Incremental learning
Always act
Provide representations and decompositions
Necessary conditions to achieve SYSTEMATICA is
hierarchical arrangement of sensory and behavior
© 2015, SNU CSE Biointelligence Lab., http://bi.snu.ac.kr
14
Biological Embedding of SYSTEMATICA
To achieve brain-like intelligence
Synergistic interplay of diff. level of hierarchy
Dynamic architecture
Brain modeled as inhibition of sensory signals and
motor commands
Deeper communication between units plausible
and beneficial
Efficient in (re)-using est. representations & processes
© 2015, SNU CSE Biointelligence Lab., http://bi.snu.ac.kr
15
ALIS: Architecture and Elements
ALIS represents
incrementally
integrated system
Elements are
hierarchically
arranged
Produce observable
behavior
Schematics of ALIS formulated from SYSTEMATICA
© 2015, SNU CSE Biointelligence Lab., http://bi.snu.ac.kr
16
So far….
Goal: Create Brain Like Intelligence
Motivation: Human brain,
Concepts: Active Learning, adaptability, Autonomy
Architecture: PISA, Systematica
Achievement: Advanced Step in Innovative Mobility
(ASIMO) {Humanoid}
Challenges: Stability, incremental knowledge
© 2015, SNU CSE Biointelligence Lab., http://bi.snu.ac.kr
17
Conclusion
ALIS System has independent units built
Incremental hierarchy yields combined
performance enabling
Combines autonomy and ability to learn, develop
Towards Cognitive Robotics
Researching and creating in an incremental and
holistic fashion leads to better understanding of
natural and artificial brain-like systems
© 2015, SNU CSE Biointelligence Lab., http://bi.snu.ac.kr
18
Review Question
What do we gain by pursuing task description and
whole body control in cognitive architecture?
Description of tasks in natural way than in joint space
High level process don’t care about details of motion
Motion range is extended incrementally
Understand DoF redundancy in movement &
correspondence to hand actions & adaption to force
Solve acceptance problems with robots
Self collision avoidance on the level of motion control
© 2015, SNU CSE Biointelligence Lab., http://bi.snu.ac.kr
19
Review Question
What do we gain by pursuing such kind of task
description and whole body control in cognitive
architecture?
Description of tasks in natural way than in joint space.
High level process don’t care about details of motion
Motion range is extended incrementally – appearance of
robot motion is naturally relaxed
Understand DoF redundancy in movement and
correspondence to hand actions & adaption to force
Solve acceptance problems with robots
Self collision avoidance on the level of motion control
© 2015, SNU CSE Biointelligence Lab., http://bi.snu.ac.kr
20
Thank you for listening
21