


19 Orthogonal projections and orthogonal matrices
... components, the cosine of the angle between x and y is computed with the same formula as in the standard basis, and so on. We can summarize this by saying that Euclidean geometry is invariant under orthogonal transformations. Exercise: ** Here’s another way to get at the same result. Suppose A is a ...
... components, the cosine of the angle between x and y is computed with the same formula as in the standard basis, and so on. We can summarize this by saying that Euclidean geometry is invariant under orthogonal transformations. Exercise: ** Here’s another way to get at the same result. Suppose A is a ...



1300Y Geometry and Topology, Assignment 1 Exercise 1. Let Γ be a
... b) Show that M naturally inherits the structure of a smooth manifold. c) Let M̃ = S n and Let Γ = Z/2Z act via h · x = −x, where h is the generator of Γ. Show that the hypotheses above are satisfied, and identify the resulting quotient manifold. d) Let M̃ = Cn − {0} and let the generator of Γ = Z ac ...
... b) Show that M naturally inherits the structure of a smooth manifold. c) Let M̃ = S n and Let Γ = Z/2Z act via h · x = −x, where h is the generator of Γ. Show that the hypotheses above are satisfied, and identify the resulting quotient manifold. d) Let M̃ = Cn − {0} and let the generator of Γ = Z ac ...

... glance, they do have some rather odd properties. Thus, even relative consistency proofs give increased credibility to these "new" geometries. If you choose this assignment, your task wil be to construct at least one Euclidean model for each of the two non-Euclidean geometriess considered, and prove ...

Vectors and Plane Geometry - University of Hawaii Mathematics
... use them to describe the line through them as in (1.10). Exercise 20. Find an equation in general form for the line through the points (2, −1) and (4, 5). One may use the tools of this section to prove classical results from geometry. The median of a triangle is a line segment that joins a vertex of ...
... use them to describe the line through them as in (1.10). Exercise 20. Find an equation in general form for the line through the points (2, −1) and (4, 5). One may use the tools of this section to prove classical results from geometry. The median of a triangle is a line segment that joins a vertex of ...



Classifying Spaces - School of Mathematics and Statistics
... The last two properties of principal bundles in the above proposition actually characterise them, i.e. we have the following converse proposition: Proposition 1.2 Let G be a topological group acting freely and continuously on a space E. If the projection map π : E −→ E/G is a fiber bundle, then it i ...
... The last two properties of principal bundles in the above proposition actually characterise them, i.e. we have the following converse proposition: Proposition 1.2 Let G be a topological group acting freely and continuously on a space E. If the projection map π : E −→ E/G is a fiber bundle, then it i ...

Tangents and Normals
... In this Workbook you will learn to apply your knowledge of differentiation to solve some basic problems connected with curves. First you will learn how to obtain the equation of the tangent line and the normal line to any point of interest on a curve. Secondly, you will learn how to find the positio ...
... In this Workbook you will learn to apply your knowledge of differentiation to solve some basic problems connected with curves. First you will learn how to obtain the equation of the tangent line and the normal line to any point of interest on a curve. Secondly, you will learn how to find the positio ...








PDF
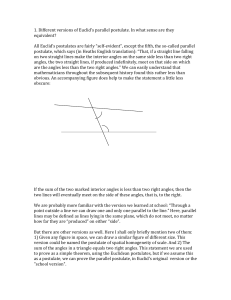
... Its converse theorem is also valid in Euclidean geometry: Theorem 2. If two parallel lines (` and m) are cut by a transversal (t), then each pair of corresponding angles (e.g. α and β) are congruent. Remark. The angle β in both theorems may be replaced with its vertical angle β1 . The angles α and β ...
... Its converse theorem is also valid in Euclidean geometry: Theorem 2. If two parallel lines (` and m) are cut by a transversal (t), then each pair of corresponding angles (e.g. α and β) are congruent. Remark. The angle β in both theorems may be replaced with its vertical angle β1 . The angles α and β ...

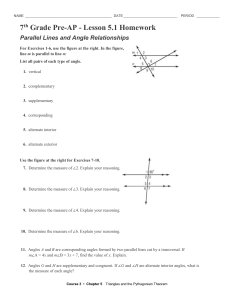
Learning Target Unit Sheet Course: Geometry Chapter 3: Parallel
... G.CO.1 know precise definitions of angle, circle, perpendicular line, parallel line, and line segment based on the undefined notions of a point, line, distance along a line and distance around a circular arc. G.CO.9 Prove theorems about line, and angles. G.MG.3 Apply geometric methods to solve desig ...
... G.CO.1 know precise definitions of angle, circle, perpendicular line, parallel line, and line segment based on the undefined notions of a point, line, distance along a line and distance around a circular arc. G.CO.9 Prove theorems about line, and angles. G.MG.3 Apply geometric methods to solve desig ...


Slide 1
... Triangle area is proportional to excess of angle sum. Surface area of unit sphere = 4π Surface area of hemisphere = 2π Surface area of lune of angle A = 2A When a third line is drawn, a triangle ABC is formed. The angles at B and C mark two other lunes of area 2B and 2C, respectively. The triangle ...
... Triangle area is proportional to excess of angle sum. Surface area of unit sphere = 4π Surface area of hemisphere = 2π Surface area of lune of angle A = 2A When a third line is drawn, a triangle ABC is formed. The angles at B and C mark two other lunes of area 2B and 2C, respectively. The triangle ...
Riemannian connection on a surface

For the classical approach to the geometry of surfaces, see Differential geometry of surfaces.In mathematics, the Riemannian connection on a surface or Riemannian 2-manifold refers to several intrinsic geometric structures discovered by Tullio Levi-Civita, Élie Cartan and Hermann Weyl in the early part of the twentieth century: parallel transport, covariant derivative and connection form . These concepts were put in their final form using the language of principal bundles only in the 1950s. The classical nineteenth century approach to the differential geometry of surfaces, due in large part to Carl Friedrich Gauss, has been reworked in this modern framework, which provides the natural setting for the classical theory of the moving frame as well as the Riemannian geometry of higher-dimensional Riemannian manifolds. This account is intended as an introduction to the theory of connections.