PDF
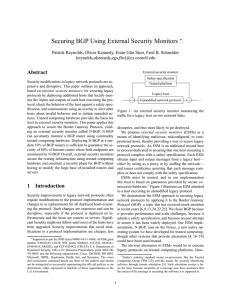
... able to coordinate to derive guarantees about the behavior of unmonitored hosts. For example, if all of a host’s peers are monitored, then all of the host’s inputs and outputs will be seen by at least one ESM, even though the host itself is not monitored. The unmonitored hosts’ peers’ ESMs can commu ...
... able to coordinate to derive guarantees about the behavior of unmonitored hosts. For example, if all of a host’s peers are monitored, then all of the host’s inputs and outputs will be seen by at least one ESM, even though the host itself is not monitored. The unmonitored hosts’ peers’ ESMs can commu ...



2716D DeviceNet Module IG - Control Technology Corp.
... to Control Technology’s automation controllers. DeviceNet is a lowcost, open network standard that provides for reduced system complexity and significant reductions in wiring costs. DeviceNet allows different industrial devices such as a CTC controller and devices from other manufacturers (sensors, ...
... to Control Technology’s automation controllers. DeviceNet is a lowcost, open network standard that provides for reduced system complexity and significant reductions in wiring costs. DeviceNet allows different industrial devices such as a CTC controller and devices from other manufacturers (sensors, ...

檔案下載 - TWBBS.org 自由網域
... RIP packets are carried over UDP/IP with port 520 Packets are sent every 30 seconds, or faster when triggered updates If a route is not refreshed within 180 seconds (6x30), the distance is set to infinity Each entry (one route) of RIP message is encoded over 20 bytes long (reservation part is used i ...
... RIP packets are carried over UDP/IP with port 520 Packets are sent every 30 seconds, or faster when triggered updates If a route is not refreshed within 180 seconds (6x30), the distance is set to infinity Each entry (one route) of RIP message is encoded over 20 bytes long (reservation part is used i ...

II. bicc overview
... APM (if “tunneling to be used” was not indicated in the IAM) specifies that the bearer control tunneling shall not be used. The CSF does not process the Bearer Control Protocol information transported by tunneling mechanism. The unmodified BCP information is tunneled through the CBC protocol toward ...
... APM (if “tunneling to be used” was not indicated in the IAM) specifies that the bearer control tunneling shall not be used. The CSF does not process the Bearer Control Protocol information transported by tunneling mechanism. The unmodified BCP information is tunneled through the CBC protocol toward ...

cit 852: data communication and network
... you have a question or problem with an assignment, with your tutor's comments on an assignment or with the grading of an assignment. You should try your best to attend the tutorials. This is the only chance to have face to face contact with your tutor and to ask questions which are answered instantl ...
... you have a question or problem with an assignment, with your tutor's comments on an assignment or with the grading of an assignment. You should try your best to attend the tutorials. This is the only chance to have face to face contact with your tutor and to ask questions which are answered instantl ...
ANALYSIS OF RED PACKET LOSS PERFORMANCE IN A SIMULATED IP WAN
... performance. It is shown that random packet discarding improves source transmission rate stabilization, as well as node utilization. If the packet dropping probability is set high, the TCP source transmission rates are low, but a low packet drop probability provides high transmission rates to a few ...
... performance. It is shown that random packet discarding improves source transmission rate stabilization, as well as node utilization. If the packet dropping probability is set high, the TCP source transmission rates are low, but a low packet drop probability provides high transmission rates to a few ...

UNI - MEF
... User Network Interface (UNI) Requirements and Framework Metro Ethernet Network Architecture Framework Part 2: Ethernet Services Layer User Network Interface (UNI) Type 1 Implementation Agreement Abstract Test Suite for Traffic Management Phase 1 Requirements for Management of Metro Ethernet Phase 1 ...
... User Network Interface (UNI) Requirements and Framework Metro Ethernet Network Architecture Framework Part 2: Ethernet Services Layer User Network Interface (UNI) Type 1 Implementation Agreement Abstract Test Suite for Traffic Management Phase 1 Requirements for Management of Metro Ethernet Phase 1 ...
PHysical laYer protocol
... Ethernet history • 1960s, the University of Hawaii. • 1970s, Xerox developed the first system. • 1980, IEEE released 802.3 specification. • 1980s, Digital, Intel and Xerox jointly developed and released an Ethernet specification (v2.0), Compatible with 802.3 • Today, the term Ethernet is often used ...
... Ethernet history • 1960s, the University of Hawaii. • 1970s, Xerox developed the first system. • 1980, IEEE released 802.3 specification. • 1980s, Digital, Intel and Xerox jointly developed and released an Ethernet specification (v2.0), Compatible with 802.3 • Today, the term Ethernet is often used ...

Mobile Communications
... 802.20 (Mobile Broadband Wireless Access) Prof. Dr.-Ing. Jochen Schiller, http://www.jochenschiller.de/ ...
... 802.20 (Mobile Broadband Wireless Access) Prof. Dr.-Ing. Jochen Schiller, http://www.jochenschiller.de/ ...



TN-Lecture8
... Continue… • But, what is the difference between DXC and PSTN Digital Switch? • A PSTN Digital Switch, whether serving the local area, tandem, or toll, sets up a shortterm virtual circuit where a connection may last just seconds, minutes, or several hours. • A DXC has more permanency where the durat ...
... Continue… • But, what is the difference between DXC and PSTN Digital Switch? • A PSTN Digital Switch, whether serving the local area, tandem, or toll, sets up a shortterm virtual circuit where a connection may last just seconds, minutes, or several hours. • A DXC has more permanency where the durat ...
Linux+ Guide to Linux Certification
... Parts of the Infrared PLCP Frame • Length field indicates time to transmit entire frame • Header Error Check has value to determine if data was transmitted correctly • Data field can be from 1 to 20,000 time slots ...
... Parts of the Infrared PLCP Frame • Length field indicates time to transmit entire frame • Header Error Check has value to determine if data was transmitted correctly • Data field can be from 1 to 20,000 time slots ...

STANAG 5066 Update - HFIA, High Frequency Industry Association
... USN has recently developed and tested a robust token-relay approach for sparse topologies where more than one relay may be required ...
... USN has recently developed and tested a robust token-relay approach for sparse topologies where more than one relay may be required ...

Oracle RAC From Dream To Production
... cluster_interconnects parameter It provides Oracle with information about additional cluster interconnects available for use and can be used to load balance the interconnect traffic to different physical interconnects thus increasing interconnect bandwith. When you set CLUSTER_INTERCONNECTS in clu ...
... cluster_interconnects parameter It provides Oracle with information about additional cluster interconnects available for use and can be used to load balance the interconnect traffic to different physical interconnects thus increasing interconnect bandwith. When you set CLUSTER_INTERCONNECTS in clu ...
2 - Cambridge Computer Laboratory
... • LS: each node learns the complete network map; each node computes shortest paths independently and in parallel • DV: no node has the complete picture; nodes cooperate to compute shortest paths in a distributed manner ...
... • LS: each node learns the complete network map; each node computes shortest paths independently and in parallel • DV: no node has the complete picture; nodes cooperate to compute shortest paths in a distributed manner ...
3rd Edition: Chapter 4 - Web Services Overview
... “elastic” service, no strict strict timing, reliability timing req. requirements “smart” end systems need for guaranteed (computers) service can adapt, perform “dumb” end systems control, error recovery telephones simple inside network, complexity inside complexity at “edge” networ ...
... “elastic” service, no strict strict timing, reliability timing req. requirements “smart” end systems need for guaranteed (computers) service can adapt, perform “dumb” end systems control, error recovery telephones simple inside network, complexity inside complexity at “edge” networ ...
Layer 3 - Ohio Supercomputer Center
... Local Area Network Layer (Layer 3) Internet Protocol (IP) Layer 1 (Layer 2) Local Area Network (LAN) Physical Layer (Layer 1) Physical ...
... Local Area Network Layer (Layer 3) Internet Protocol (IP) Layer 1 (Layer 2) Local Area Network (LAN) Physical Layer (Layer 1) Physical ...
Ethernet POWERLINK (DRAFT)
... The slot time of an 100MB Ethernet is tslot ≈ 5µs. It is twice the time it takes for an electronic pulse (OSI Layer 1 Physical) to travel the length of the maximum theoretical distance between two nodes. In CSMA/CD networks such as ethernet, Network Interface Controllers (NICs) wait a minimum of the ...
... The slot time of an 100MB Ethernet is tslot ≈ 5µs. It is twice the time it takes for an electronic pulse (OSI Layer 1 Physical) to travel the length of the maximum theoretical distance between two nodes. In CSMA/CD networks such as ethernet, Network Interface Controllers (NICs) wait a minimum of the ...
