Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Environmental enrichment wikipedia , lookup
Apical dendrite wikipedia , lookup
Axon guidance wikipedia , lookup
Neuromuscular junction wikipedia , lookup
Response priming wikipedia , lookup
Synaptogenesis wikipedia , lookup
Cognitive neuroscience of music wikipedia , lookup
Eyeblink conditioning wikipedia , lookup
Metastability in the brain wikipedia , lookup
Clinical neurochemistry wikipedia , lookup
Stimulus (physiology) wikipedia , lookup
Mirror neuron wikipedia , lookup
Caridoid escape reaction wikipedia , lookup
Multielectrode array wikipedia , lookup
Neural oscillation wikipedia , lookup
Embodied language processing wikipedia , lookup
Nervous system network models wikipedia , lookup
Neuroanatomy wikipedia , lookup
Neuropsychopharmacology wikipedia , lookup
Spike-and-wave wikipedia , lookup
Neural coding wikipedia , lookup
Pre-Bötzinger complex wikipedia , lookup
Neural correlates of consciousness wikipedia , lookup
Central pattern generator wikipedia , lookup
Neuroplasticity wikipedia , lookup
Synaptic gating wikipedia , lookup
Optogenetics wikipedia , lookup
Efficient coding hypothesis wikipedia , lookup
Cerebral cortex wikipedia , lookup
Development of the nervous system wikipedia , lookup
Channelrhodopsin wikipedia , lookup
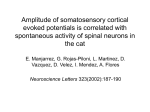
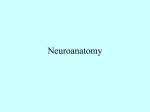
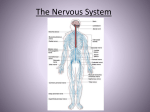
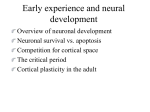
Cerebral Cortex August 2012;22:1904– 1914 doi:10.1093/cercor/bhr267 Advance Access publication September 30, 2011 Descending Systems Translate Transient Cortical Commands into a Sustained Muscle Activation Signal Uri Shalit1, Nofya Zinger1, Mati Joshua2 and Yifat Prut1 1 Department of Medical Neurobiology and The Interdisciplinary Center for Neural Computation, The Hebrew University—Hadassah Medical School, Jerusalem 91120, Israel and 2Department of Physiology, W.M. Keck Foundation Center for Integrative Neuroscience, University of California, San Francisco, San Francisco, CA 94143, USA Shalit and Zinger have contributed equally to this work Address correspondence to Yifat Prut, Department of Medical Neurobiology, The Hebrew University—Hadassah Medical School, PO Box 12272, Jerusalem 91120, Israel. Email: [email protected]. Controlling motor actions requires online adjustments of timevarying parameters. Although numerous studies have attempted to identify the parameters coded in different motor sites, the relationships between the temporal profile of neuronal responses and the dynamics of motor behavior remain poorly understood in particular because motor parameters such as force and movement direction often change over time. We studied time-dependent coding of cortical and spinal neurons in primates performing an isometric wrist task with an active hold period, which made it possible to segregate motor behavior into its phasic and sustained components. Here, we show that cortical neurons transiently code motor-related parameters when actively acquiring a goal, whereas spinal interneurons provide persistent information regarding maintained torque level and posture. Moreover, motor cortical neurons differed substantially from spinal neurons with regard to the evolvement of parameter-specific coding over the course of a trial. These results suggest that the motor cortex and spinal cord use different control policies: Cortical neurons produce transient motor commands governing ensuing actions, whereas spinal neurons exhibit sustained coding of ongoing motor states. Hence, motor structures downstream to M1 need to integrate cortical commands to produce state-dependent spinal firing. Keywords: motor control, motor cortex, mutual information, spinal cord, tuning Introduction During movement, the motor system is required to continuously adjust the machinery which produces actions while integrating general information about the environment (e.g., spatial location of targets) and the internal state (e.g., limb configuration). Activity in the motor cortex has been shown to be related to both low-level (Kalaska et al. 1989, 1997; Cabel et al. 2001; Kurtzer et al. 2005, 2006) and high-level (Georgopoulos et al. 1982, 1986; Schwartz et al. 2004) parameters but the coding of these attributes has often been found to be interdependent (Scott and Kalaska 1995), suggesting that these 2 representations may coexist in the activity of single motor cortical neurons (Kalaska 2009). Clearly at some stage, this mixed representation must be resolved since motoneurons (MNs) produce an unequivocal muscle command. Several mechanisms have been proposed to explain the way muscle commands are extracted from the cortical representation. In one scenario, a small group of motor cortical neurons specifically translates the mixed cortical representation into a muscle-based command, which is subsequently transmitted downstream to muscles (Kakei et al. Ó The Author 2011. Published by Oxford University Press. All rights reserved. For permissions, please e-mail: [email protected] 1999, 2001). Alternatively, the extensive connectivity of the motor cortex with multiple subcortical sites (Baldissera et al. 1981; He et al. 1993; Porter and Lemon 1993; Lemon 2008) could be used to extract the muscle command from the integrated cortical representation (Shah et al. 2004). Recently, based on the finding that intrinsic commands emerge first downstream to M1, we hypothesized that spinal interneurons do not serve as a simple integrator of cortical signals but act as a processing link in the translation of motor commands into muscle-based signals (Yanai et al. 2007, 2008; Harel et al. 2008). To further test this hypothesis, we studied the response properties of neurons in the motor cortex, spinal cord, and of working muscles, while 3 monkeys performed a 2D wrist task designed to dissociate motor parameters (Kakei et al. 1999). Here, we show that the directional-torque tuning of single cortical and spinal neurons had a similar shape but different spatiotemporal distributions: Cortical neurons expressed a temporally transient and spatially uniform preferred direction (PD) distribution consistent with a brief representation of the target space, whereas spinal PDs were spatially biased but temporally stable, consistent with the muscle activation profile. Analyzing the information content of cortical and spinal neurons further distinguished the transient nature of cortical coding from the enhanced sensitivity of spinal neurons to static motor states. These results are in line with a distributed mode of processing in the motor system in which the motor cortex codes motor commands which integrate both the required ‘‘muscle-based’’ parameters of the action and the externally defined target to be obtained, while the spinal circuitry maintains the ongoing motor state. These distinct coding properties indicate that elements downstream to M1 further process motor commands to make it suitable for driving working muscles. Materials and Methods Animals and Behavioral Task Three female monkeys (Maccaca fascicularis, 3--4 kg) performed an isometric 2D wrist task with an instructed delay period (Fig. 1a). During task performance, the monkey held its hand in either a pronation or supination position and controlled a cursor on a computer screen by applying a 2D isometric torque at the wrist (flexion/extension and radial/ulnar). A trial was initiated by the appearance of a central target (Trial onset). The monkey positioned the cursor inside the target by generating zero torque for a rest period (500--600 ms). Then, 8 uniformly distributed peripheral targets appeared around the center target at a fixed distance, defining the onset of a delay period. One of these peripheral targets was presented in a distinct color for 500 ms (Cue). The disappearance of the central Figure 1. Experimental setup. (a) Monkeys were seated in front of a computer screen and controlled an onscreen cursor via wrist torque. During task performance, we recorded the activity of spinal units, cortical units, and relevant muscles. Radial torque and behavioral events (the timing of which is marked by green vertical lines) recorded in a single trial are shown (for details, see Materials and Methods section). The trial is aligned on torque onset (time zero) and a small arrow indicates the beginning of torque offset. Also shown are the activities of cortical and spinal neurons recorded simultaneously in this trial. Note that during the precue period, the spinal firing rate was higher than the cortical firing rate. Also, at torque onset the cortical neuron exhibited a phasic response (red trace) while the spinal neurons (blue trace) exhibited a tonic response. These properties were characteristic of our dataset. (b) Location of motor cortical recording sites obtained for the 3 monkeys (D, G, and V) and spinal sites obtained for 2 of these monkeys (D and V). Maps were overlaid manually to align the locations of central and arcuate sulci. The cortical map depicts low-threshold arm-related sites in which tuned neurons were found (squares) and sites which did not meet the above criteria but included cells with at least 50 trials in both postures (circles). target (monkey V, 1300--1700 ms, monkeys D and G, 850--1200 ms after target onset) served as the ‘‘Go’’ signal. The monkey then had to shift the cursor into the previously cued target by generating an isometric torque ramp (Torque onset) in the appropriate direction and magnitude and keep the cursor within the target for an active hold period (350--750 ms, monkeys G and V, 700--1000 monkey D). The reappearance of the central target (occurring simultaneously with the disappearance of the peripheral targets) signaled the end of the active hold period. The monkey returned to the rest position (Torque offset) and received a reward, after which the screen went blank for 1000-1500 ms and a new trial started. The timing between externally induced events (e.g., between Cue onset and the Go signal) was randomly varied from trial to trial. The required torque level during the hold period was adjusted for each monkey to obtain persistent muscle activity without causing fatigue. During the hold period, torque values were in the range of 30 mNM (mean, 28.6 mNM, median, 27.36 mNM) with some variation across monkeys (median of 33 mNM, 25 mNM, and 27 mNM for monkeys D, G, and V, respectively). The allowed torque variation once the cursor was in the target was less than 5 mNM (5.9, 3.88, and 4.96 mNM for monkeys D, G, and V, respectively). Times of torque onset and offset were defined offline as crossing of a threshold by the derivative of the torque signal. These events (the beginning of Torque onset and the beginning of Torque offset) were used to align neural activity during analysis of neuron responses. Recording Sessions Details of the recording technique are described elsewhere (Yanai et al. 2007). A cortical chamber was implanted above the motor cortex, and the location of the arm-related primary motor cortex (M1) was mapped using a train of stimulating pulses (50 ms of biphasic stimulation delivered at 300 Hz with intensity <60 lA). In this study, we selected cortical neurons that were recorded from the arm-related area in the primary motor cortex (threshold for evoked response <15 lA). Subsequently, a spinal chamber was implanted above the cervical spinal cord (C6--T1). Extracellular single-unit activity was recorded simultaneously from the motor cortex and spinal interneurons (INs) located at intermediate lamina while the monkey performed the task (using 1--2 cortical electrodes and a single spinal electrode). We targeted spinal neurons that were located deep in the intermediate to ventral spinal lamina recorded deeper than 1 mm from the first cells encountered. These neurons differed in firing properties from dorsal horn neurons as well as from MN (Prut and Perlmutter 2003a, 2003b). We did not encounter any MN action potentials when averaging muscle activity around spike firing times, although a small proportion of false negatives could have been possible. We recorded electromyogram (EMG) activity using either subcutaneous (monkey V) or transcutaneous (monkey D and G) electrodes from selected identified arm and forearm muscles. These included the Flexor-carpi-ulnaris (FCU), Palmaris Longus (PL), Flexor-carpi-radialis (FCR), Flexor-digitorum-superficialis (FDS), Flexor-digitorum-profundos (FDP), Pronator-Teres (PT), Extensor-carpi-ulnaris (ECU), Extensordigitorum-carpi (EDC), Extensor-carpi-radialis (ECR), Extensor-digitorum-45 (ED45), Extensor-digitorum-23 (ED23), Abductor-pollici-longus (APL) Biceps, Triceps, and Deltoid. After the recordings were completed, 2 monkeys (D and G) were deeply anaesthetized (ketamine, pentobarbital, 30 mg/kg), and pins were inserted into known coordinates of the cortical implant. The animals were then euthanized with pentobarbital sodium (50 mg/kg iv) and perfused with 10% formalin or 4% paraformaldehyde. Cortical locations of penetrations relative to anatomical landmarks were subsequently reconstructed (Fig. 1b). Data Analysis Response Properties of Neurons To test the tuning properties of cells, we selected cells for which we had more than 40 correct trials per posture and at least 6 targets for which we had more than 5 trials per target. We first tested cells for significant PD (resampling method [Crammond and Kalaska 1996], P < 0.05) during the –200 to +500 ms window around torque onset. Here, we compared the length of the Cerebral Cortex August 2012, V 22 N 8 1905 Table 1 Recorded muscles þ recorded muscles that were tuned and had a unimodal PD—recorded muscles that were not used for analysis Table 2 Numbers of tuned cortical and spinal cells Tuned cells and muscles Extensors APL EDC ECR ECU ED23 ED45 Monkey D Monkey G Monkey V Flexors Monkey D Monkey G Monkey V Proximals Monkey D Monkey G Monkey V þ þ -þ FDS þ þ -Triceps -þ þ þ þ FCU þ þ -Deltoid þ --FDP þ þ þ þ þ þ þ þ PT þ þ -FCR þ þ þ Biceps þ þ PL þ þ þ Cellsa Pro datab Sup datab 213 (64, 95, 54) 83 (34, 0, 49) 43 (15, 21, 7) 157 54 38 128 48 30 158 (44, 78, 36) 52 (20, 0, 32) 109 26 103 34 Conditionale Unconditionalf (monkey D) 274 151 109 15 Data for MI analysis þ Motor cortex Spinal cord vector obtained by vector summation of the directional activity of the cell with the expected length obtained after random assignment of direction of the single trial data and recomputation of the length of the summed activity. The shuffling method was repeated 4000 times to allow testing of the statistical significance of the result. In order to further study tuning properties, we looked for cells in which tuning was unimodal by testing their tuning for significant fit to a von Mises function (Amirikian and Georgopoulos 2000) (Matlab function ‘‘lsqcurvefit’’) at a significance level of P < 0.01. The von Mises distribution is the circular analog of the normal distribution on a line. The function we fitted had 4 parameters: f x a; b; h; j =a + b e jcosðx – hÞ ; where a represents baseline rate, b modulation, j tuning width, and h PD. To compute the von Mises fit, we considered cells with a number of trials exceeding the above criteria for a minimal number of trials. The significance test was based on the explained variance of the fit, and only cells with a significant PD and a significant VM fit (F-test, P < 0.01) were considered to be tuned cells. Computing the tuning properties during torque offset was carried out in a similar manner but during a time window of –200 to +500 ms around the time at which the monkey started to shift the cursor back to the central target (i.e., the end of the active hold period). Perievent Time Histogram For cells which passed the above criteria, we computed the perievent time histogram (PETH) around torque onset and torque offset as defined above. In both cases, the aligning event was the beginning of torque production, which was defined offline based on the derivative of the torque signal (Yanai et al. 2007). The PETH was obtained by counting spikes in 20-ms bins. We then averaged these histograms for the target nearest the neuron’s PD across all neurons (spinal and cortical neurons separately). This procedure yielded a population-based temporal profile of activity in the PD. For data analysis of muscle activity, we considered only those muscles that expressed significant unimodal tuning (Table 1). Averaged muscle response around torque onset was normalized by first removing the baseline and dividing by the standard deviation, both computed during a test epoch of –1000 to –500 ms relative to torque onset. These response profiles were divided by their norm to obtain a comparable range of values across the different muscles. The response profile of single neurons and muscles was quantified based on the average response around torque onset in the PD. Average rates were calculated within a 0--250 ms time window after torque onset (fr1) as well as during a late window spanning 250 ms before torque offset (fr2) using a PETH aligned on that event. A ‘‘phasic-tonic index’’ (PTI) was then defined as (fr1 – fr2)/(fr1 + fr2). This index tends toward zero when the response profile is tonic (i.e., fr1 fr2) and toward 1 when the response profile is phasic (fr1 > > fr2). For EMG activity, fr1 was computed for a later time window (150--400 ms) because the muscle response lagged behind neural activity. We found that the exact timing of the test window (fr1) selected for EMG data did not have a noticeable impact on the distribution width, but its median monotonically increased from slightly negative values to near zero values, reflecting the fact that early windows captured the rising phase of the EMG signal. 1906 Translation of Transient Cortical Commands into a Sustained Signal Torque onsetc Primary motor cortexd Spinal Muscles Torque offset Primary motor cortexd Spinal d Shalit et al. 319 (109, 0, 210) 166 (15, 0, 151) a Counts the total number of cells, with the contribution of monkey D, G, and V in parentheses. A single cell could have been tested inpronation and\or supination trials, so that N(all calls) $ N(pro_data) þ N(sup_data). c For analysis of tuning and PETH shape, we took cells that were tuned around torque onset (or offset) based on a resampling method (P \ 0.05) and had a significant fit to the Von Mises function (P \ 0.01). d Arm-related areas of M1. e For computing MI, we took cells from motor cortex and spinal cord with at least 50 trials in pronation and supination. Note that only monkey V had spinal neurons which met this criterion. f To compute the unconditional MI for monkey D, we studied cells with at least 50 trials in either hand posture. In this case, single cells could have contributed values for both postures. b Computing Mutual Information for Neuronal Data Mutual information (MI) (Cover and Thomas 2006) between F, the number of spikes in a given window, and torque direction D, was calculated by using the joint probability p(f, d) of a cell firing f spikes in the window, while the torque direction was d. The overall probability p(f) of observing f spikes in the window was obtained by margin alization:p f =+d pðf ; dÞ; p(d) was calculated likewise. Given these probabilities, the MI (in bits) between F and D was defined to be: pðf ; dÞ : ð1Þ I F ; D = + p f ; d log2 pðf Þ pðdÞ f ;d In practice, the probabilities p(f,d) are approximated by the empirical probabilities p̂ðf ; dÞ for every cell and given time window: given a count matrix C whose (i, j) entry is the number of times j spikes were observed for torque direction i, we have p̂ðf =j; d =iÞ=+Cði;jÞ : i;j Cði;jÞ This leads to an empirical approximation of the MI: p̂ðf ; dÞ ; ð2Þ Iˆ F ; D = + p̂ f ; d log2 p̂ðf Þ p̂ðdÞ f ;d where p̂ðf Þ and p̂ðdÞ are derived by marginalization of p̂ðf ; dÞ. As there were 8 different torque directions and a typical cell can emit 15 spikes within a 500-ms window, there were as many as 8 3 15 = 120 different probabilities to assess, with about 100 or so trials conducted. This resulted in undersampling, which in turn is known to lead to a positive bias in the estimation of MI values (Treves and Panzeri 1995; Panzeri et al. 1996). In the current work, we used a method developed by Nelken et al. (2005), which has been shown to consistently and relatively robustly offset this positive bias. The method is as follows. Treves and Panzeri (1995) calculated an asymptotic expansion of the expected positive bias encountered when calculating MI based on empirical probabilities derived from count matrices. The expansion is in inverse powers of the number of samples N =+i; j Cði; jÞ. For an m 3 k count matrix with N samples, the first term in this expansion is ðm – 1Þðk – 1Þ ð3Þ 2 ln2 N (the other terms depend on the hypothetical true underlying probability and thus cannot be calculated). Nelken et al.’s (2005) ‘‘Adaptive Direct’’ algorithm exploits this bias estimate to find an optimum binning strategy for the count matrix C. At each step, the ‘‘naı̈ve’’ MI is calculated as in equation (2), and the approximate bias is subtracted following equation (3). This gives an estimate of the true MI. After this is calculated, the matrix C is reduced by adjoining the least probable column (or row) to its least probable neighbor. In our setup, columns correspond to the number of spikes emitted; for example, if a cell occasionally fired 8 spikes and 6 spikes, but never 7 spikes, the 7 spike column would have a probability of 0 and would be merged with one of its 2 neighbors (the one with the lower probability). Typically, as the 8 torque directions were more or less evenly spread, whereas the different spike numbers were far from being so, initially the algorithm merged columns until they were all roughly equiprobable with the rows. The merging ends when the matrix has one row or column. With each binning step, the naı̈ve MI is reduced but so is the bias. The binning in which the difference between the 2 is greatest is considered optimal from a debiasing point of view. The bias-corrected MI value obtained by this binning method was the MI value used in further analyses. In order to further prevent overestimation of MI, only cells with at least 50 trials per posture were included in these analyses. Note that these cells were not necessarily directionally tuned. We used 2 window sizes for the analyses, spanning either 500 or 300 ms. Window sliding was in steps of 10 ms. MI conditioned on posture, I(F ;DjP) was calculated in a similar way: pðf ; djposÞ I F ; D P = + pðposÞ + p f ; d pos log2 pðf jposÞ pðdjposÞ pos f ;d = + pðposÞI F ; D posture=pos ; pos where p(pos) is the probability of each of the different postures (pronation or supination). I(F ;PjD) was calculated analogously. Data Sets Used for Analysis We recorded a total of 555 motor cortical cells (178, 103, and 274 from monkeys D, G, and V, respectively) and 292 spinal cells (66, 0, and 226). To analyze the tuning and response properties of spinal and cortical neurons (Table 2), we considered tuned motor cortical and spinal neurons (more than 40 trials per posture and at least 6 targets for which the number of trials >5) with a significant fit to the von Mises function. For this purpose, motor cortical neurons were selected from sites that evoked an arm response when applying stimulation at an intensity <15 lA. To compute the MI, we used all the motor cortical and spinal cells with at least 50 trials in pronation and supination from monkeys D and V for which we had both cortical and spinal data. In this case, we used a more lenient criterion for including motor cortical neurons that were not necessarily from low-threshold and\or armrelated sites. To study the effect of extended delay (used in monkey D only), we used the MI between firing rate and direction given a single hand posture—I(D ; FjP = p). Table 2 summarizes the number of cells and muscles used for the different analyses. Results Differential Dynamic of Response Patterns Observed for Cortical Neurons Versus Spinal Neurons The task we used required the monkeys to shift the cursor to a precued peripheral target and to generate a persistent and constant torque level to maintain the cursor within the peripheral target until a release signal was given, at which point the monkey shifted the cursor back to center (Fig. 1a). We studied the evolution of cortical and spinal activity in the PD for tuned neurons. We found that in the PD, cortical neurons often expressed a transient response, which was more pronounced during torque ramp but decayed during active hold (Fig. 2a). On the other hand, INs fired persistently throughout the torque ramp and active hold periods in the PD. At the end of the hold period, the sustained activity of tuned Figure 2. Response profiles of spinal and cortical neurons. PETHs were computed for tuned cortical (red) and spinal (blue) neurons. PETHs were computed for the PD in a time window spanning 500 to þ1000 ms around torque onset and using a 20-ms bin size. For each event, we show the average response across all neurons (upper chart) and the average normalized response obtained after scaling the single-cell response to vary between 0 and 1 (lower chart) so that the effect of firing rate variation across cells was canceled out. The number of cortical and spinal PETHs used for this analysis is shown in the upper 2 panels (Nctx and Nsp, respectively). (a) PETHs computed around torque onset for the target nearest the neuronal PD. (b) Same as a but using the torque offset event for aligning the PETHs. In this case, tuned cells and PD were computed for the period of 200 to 500 ms around torque offset. The number of neurons is thus different from that in a. INs was reduced and returned to baseline levels (Fig. 2b). By contrast, tuned cortical neurons were recruited during this period and thus responded in a transient manner. For comparison, we computed the response profile of active muscles with significant unimodal tuning properties (Fig. 3a). We found that the average response profile of muscles (distal and proximal) tended to be tonic, similar to spinal INs (Fig. 3b). We further quantified single cell response profiles using an ad-hoc formulated PTI, which was based on the firing at onset and the sustained hold period (Fig. 4a). The index was the difference between the 2 values over their sum. Note that on average, the onset of muscle activity lagged behind the onset of neuronal activity. For this reason, we used different time windows to compute the PTI for neural and muscle activity (see Materials and Methods). Near-zero values corresponded to tonic response and values near 1 corresponded to the phasic response profile. We found (Fig. 4b) that spinal neurons tended to concentrate around zero values, whereas the mean of the cortical distribution was shifted toward positive values. The difference between the 2 distributions was significant (t-test, P < < 0.001). The PTI for muscles was narrowly distributed around zero, suggesting a high tendency for muscles to fire tonically in our task. This result was consistent for a variety of time windows used for computing the muscle PTI. We further tested and found that motor cortical neurons that were either recorded from sites in which cortical stimulations evoked a short latency spinal response (Yanai et al. 2007) or had a functional link with forearm muscles (measured by spikeCerebral Cortex August 2012, V 22 N 8 1907 Figure 3. Response profiles of forearm muscles. Activity of forearm muscles was recorded trans- or subcutaneously. (a) The average muscle activity around torque onset was computed for each of the 8 targets. Examples of extensor muscle (extensor carpi radialis-ECR) in pronation trials are shown together with the tuning curves and corresponding PD. The average radial torque is shown for each target (dashed lines). Average muscle activity in the target nearest the PD is highlighted in black. (b) The response of flexors, extensors, and proximal muscles in the PD was averaged separately. Each plot shows the overlay of a single muscle response profile (light gray) and the average profile (black). This figure shows the result obtained for pronation trials. Figure 4. Quantification of single cells and muscle response profiles. (a) Average response profiles of cortical neurons (red), spinal neurons (blue), and working muscles (green). Standard error of the mean is shown around each profile. As neurons and muscles have a different scale, the profiles were adjusted arbitrarily to allow comparison of the response shape rather than response magnitude. Time windows for which average response was measured for computing the PTI are shown for neurons (fr2 and fr1) and muscles (fr2 and fr1’). Note that fr2 was computed using a PETH that was aligned on torque offset and is shown here solely for purposes of illustration. (b) Distribution of PTIs (see text for formal definition) computed for cortical neurons (orange), spinal neurons (blue), and muscles (green). Arrows point to the mean level for each distribution. (c) Cumulative distribution of the PTIs shown in b. Lines (50% and 95%) are shown. (d) Distributions of PTIs computed for cortical neurons recorded from sites connected with spinal sites (red), unconnected cortical sites (orange), and cortical sites for which we found a functional linkage with forearm muscles (brown). 1908 Translation of Transient Cortical Commands into a Sustained Signal d Shalit et al. triggered averaging) had a similar PTI as did unidentified motor cortical neurons (Fig. 4d, Kruskal Wallis test, P > 0.65). Finally, to test whether the same group of neurons were activated at onset and offset of active torque, we computed the preferred target difference for cortical and spinal neurons that were significantly tuned on both torque onset and torque offset (Fig. 5a,b). We found that the average difference in preferred target was around 180° for cortical neurons, indicating that these cells were activated for 2 opposing targets during torque onset and offset (Fig. 5c). In contrast, spinal PD differences were around 0°, indicating that cells were activated for the same targets during torque onset and offset (Fig. 5d). Hence, if we consider the sustained active-hold period as a single motor state, this state is maintained by a single spinal population, whereas distinct groups of cortical neurons mediate its onset and offset (in our case, shifting the cursor to target and back to center). Examples of single cortical and spinal neurons that expressed this differential target-related activity are shown in Figure 6a. Note that here we computed the preferred target and not the preferred torque direction, as used more often. Nevertheless, the difference in tuning consistency between cortical and spinal neurons was maintained even when examining the preferred torque direction. Cortical and Spinal Neurons Have a Similar Tuning Shape but a Different Distribution of PDs The PETH captures the response pattern of neurons for a specific (preferred) target, whereas the tuning function of a neuron captures its mean response across different targets. Tuning Figure 5. PD differences between torque onset and offset. We selected neurons, which were tuned both at onset and offset of torque and plotted the distributions of single neuron PD differences (dPDs) between these 2 epochs. The polar histograms show that for cortical neurons (a) the dPDs tended to concentrate around 180°, whereas for spinal neurons (b), these values were closer to zero. Numbers in gray next to each polar histogram denote the scale (in counts) for each plot. (c and d) Illustrations showing for cortical and spinal neurons with the same PD during toque onset (target 2—dark gray) what would be their preferred target at torque offset. For convenience, targets are numbered from 1 to 8. Torque onset and offset are denoted with dashed lines and arrows. Note that for cortical neurons (c), maximal firing during torque offset would be when monkeys shift the cursor from the opposite target (target 6) back to center. In contrast, spinal neurons (d) with the same PD at torque onset are expected to be have maximal firing rate during torque offset when monkeys shift the cursor from the preferred target (target 2) back to center. properties are commonly used to quantify the relationships between neuronal firing and external or internal parameters (Fig. 6a,b). Tuning functions of cortical and spinal neurons were similar for all parameters except for the baseline level that was higher for INs (Fig. 6c). Specifically, the distribution of tuning width (quantified as the width at half height) was nonsignificantly different for cortical and spinal neurons (Wilcoxon test for equal medians, P > 0.85). This result indicates that downstream motor structures do not operate by ‘‘sharpening’’ tuning functions. Despite the similar tuning function of single spinal and cortical neurons, their respective PD distributions were considerably different. Cortical neurons expressed uniformly distributed PDs, whereas the PDs of INs were significantly biased (Fig. 6d, Rao test, P < 0.05). The observed bias rotated clockwise with hand posture, as expected from the distribution of muscle PDs (Fig. 6d). In pronation trials, this bias was consistent with an overrepresentation of flexor muscles, as was shown for spinal INs (Perlmutter et al. 1998). Interestingly, for supination trials, the downward bias remained with an added recruitment of neurons with PDs in lateral and upward directions. This added activation in supination trials might be related to the fact that performing the trials in this posture was more demanding and hence required a broader activation of INs. Nevertheless, although cortical PDs were consistent with the uniform distribution of targets in the torque\external space, spinal PDs bore more resemblance to the nonuniform PDs of working muscles. MI between Neuronal Firing and Motor Parameters Temporal response patterns and neuronal tuning are not necessarily independent properties of neuronal coding. Changes in response profile in the PD can be accompanied by rate modulation occurring for other (nonpreferred) directions such that directionality is either enhanced or canceled out. To investigate the possible interdependency between these 2 properties, we computed the MI between a cell’s firing rate and the coded variables (target direction and hand posture). MI expresses the reduction of uncertainty that a neuron’s activity provides about the value of a specific parameter, so that the MI between neurons located at different sites and a specific parameter can be compared directly. Intuitively, for a specific neuronal population, when the average MI (measured in bits) between a neuron and a parameter is high, a smaller set of independent neurons are required to fully encode this parameter. In our paradigm, 3 bits were required to code the 8 targets and one bit was required to code the 2 postures. We measured the conditional MI of cortical and spinal firing in relation to either target direction (MID) or hand posture (MIP). The average MID around torque onset (Fig. 7a) revealed only a slight tendency of cortical neurons to be more informative while firing at lower rates compared with INs. Nonetheless, the time-resolved MID revealed 2 unique patterns: cortical neurons were significantly more informative before and during torque onset compared with INs (Fig. 7b), but during the late hold period, this trend was reversed and the spinal MID was higher, as can be appreciated when aligning the time-dependent MID on torque offset (Fig. 7c, plotted on expanded time and information axes). This behavior was particularly visible in trials with a longer active hold period (Fig. 7d) for which the dynamics of cortical MID was unaffected by the extended delay, while the spinal MID faithfully followed the torque profile. Note that when the hold Cerebral Cortex August 2012, V 22 N 8 1909 Figure 6. Response properties of cortical and spinal neurons. (a) Raster plots of cortical (left) and spinal (right) units. Trials were aligned on torque onset and sorted according to target direction. The 700-ms epoch around torque onset used for computing the tuning shown in panel b is marked with a colored bar above each raster plot. (b) Single trial average firing rate (computed for a time window of 200 to þ500 ms around torque onset) and the von Mises fit of the same cortical and spinal neurons shown in a. Preferred targets and number of trials (n) are shown for each unit. (c) The average tuning curves (obtained from cells with significant PDs and significant fit to the von Mises function) were computed for cortical (red) and spinal (blue) neurons. The figure shows (from left to right) the average tuning, the average tuning after removing the baseline from the single cell tuning function to reflect differences in the tuning gain, and the normalized tuning (after baseline removal) to reflect differences in tuning width. (d) Distribution of PDs for cortical neurons (left), spinal neurons (middle), and working muscles (right) in pronation (upper charts) and supination (lower charts) trials. A Rao test was used to determine significant deviation from uniform distribution and the obtained P values (RAOp) are shown. For muscles, distribution of PDs for flexors (red), extensors (blue), and proximal muscles (green), computed for the same time window, are shown separately. period is short (relative to the bin size used in the analysis), the difference between cortical and spinal MID is more difficult to capture since it is ‘‘diluted’’ by direction-related cortical information that reappears at torque offset. During this period, 1910 Translation of Transient Cortical Commands into a Sustained Signal d Shalit et al. spinal MID decreases while cortical MID increases so that the difference between these 2 measures becomes smaller. Due to the bin size used in this analysis, this trend affected the temporal profile of MID even before torque offset. Figure 7. MI between neuronal firing and target direction. (a) Relationships between average firing rate (across all targets) and average target-related information in a given hand posture computed for cortical (red) and spinal (blue) neurons. Values were computed for a time window spanning 200 to þ500 ms around torque onset. Each neuron contributed either 1 or 2 data points depending on the number of trials available in each hand posture. Large dots represent the average across each population. (b) Time-resolved conditional MI between neuronal firing and target direction (MID), computed around torque onset using overlapping time windows of 500 ms, shifted 10 ms each time step. (c) MID aligned on torque offset in the ordinate and computed for time windows preceding torque offset (i.e., active hold). In this case, we used 300-ms time windows to maintain temporal resolution despite the shorter duration of the active hold period. Both x-axis and y-axis are expanded in this plot. (d) Same as b but using data from one monkey only (monkey D) where the hold period was longer. In this case, we took spinal cells with at least 50 trials in either pronation or supination but not both (see Materials and Methods). (e) conditional MI between neuronal firing and hand posture (MIP) computed around torque onset for each target and then averaged across targets. In this study, task performance required a correct estimate of hand posture that was constant within trials but changed across trials (either pronation or supination). Analysis of posturerelated MI revealed that hand posture was encoded differently by the cortical and spinal populations: spinal MIP was high throughout trial performance and consistently higher than cortical MIP (Fig. 7e). At torque onset, cortical MIP momentarily reached the level of spinal MIP. This result is congruent with the above result showing that spinal neurons are more informative about static motor states, whereas cortical neurons provide transient (yet often superior) information around times of change in the motor state. Discussion Early studies of the motor system formulated the question of cortical motor control in a categorical manner that contrasted a high level (Georgopoulos et al. 1982; Georgopoulos 1996; Moran and Schwartz 1999) with a low level (Kalaska et al. 1997; Todorov 2000; Scott et al. 2001; Morrow et al. 2007) coding scheme. More recent studies of the system have shown that motor cortical activity cannot be fully explained by either of these models alone (Scott and Kalaska 1997; Sergio and Kalaska 1997; Yanai et al. 2008; Kalaska 2009). Our study further explored the neuronal control of voluntary movements by using 2 different approaches: first, a direct comparison of cortical and spinal neurons was used to highlight the evolvement of coding at different levels of the motor system. Second, an analysis of timedependent changes in coding explored the consistency of coding during persistent motor states. In this manner, we showed first of all that the cortical response profile is transient, whereas spinal neurons fire persistently during torque production. Second, we found that while cortical neurons express Cerebral Cortex August 2012, V 22 N 8 1911 a uniform distribution of PDs, spinal PDs were biased. Finally, studying MI between neuronal firing and task parameters revealed that cortical neurons are more sensitive to timechanging parameters while spinal neurons provide superior coding for static parameters. The discrepancy in both parametric coding properties and response profiles indicates that spinal activity cannot be modeled as a simple averaging of cortical command; rather, a more sophisticated decoding mechanism is required to translate the cortical command into the observed spinal activity. The consistency between spinal activity and muscle activity further indicates that elements downstream to M1 are more likely to contain a muscle-based motor command. Cortical neurons exerted a predominantly transient command that contained a corepresentation of both intrinsic variables (hand posture) and extrinsic parameters (spatial location of targets). This activity preceded the motor action and thus had predictive value regarding the ensuing action. However, as soon as the target was reached, cortical activity waned substantially, despite the sustained torque produced by the monkey. Thus, the cortical command may not be able to function adequately as a low-level control signal because of its temporal properties which deviate from the exerted torque profile and its parametric content (i.e., a combined representation of internal and external parameters) as we showed previously when studying the coordinate frame of cortical neurons in the same task (Yanai et al. 2008). The activity of spinal neurons is much more appropriate to function as a low-level muscle controller. The data here show that the temporal properties of this signal and its parametric content are closer to the actual state of the motor system at any given point. These results suggest that spinal neurons not only operate in the same coordinate frame as muscles (Yanai et al. 2008) but they provide a sustained drive to muscles when such torque profile is required. Our findings thus further extend earlier reports (Crammond and Kalaska 1996; Johnson et al. 1996) by suggesting that from the premotor cortex down to the spinal cord, there is a shift in response pattern (from phasic to tonic) and response timing (from premovement to sustained movement). Nevertheless, further verification is needed given the paradigmatic differences between our work and previous studies (in terms of task, working muscles, and data analysis). The task used in this study may not provide a realistic picture of normal motor behavior. Motor actions are often transient and contain no sustained period of static torque. In these cases, we expect to obtain similar temporal pattern of cortical, spinal, and muscle activity. However, this similar activation pattern does not necessarily mean similar coding. In this respect, our task can be viewed not as a way of replicating normal motor conditions but rather as a way to dissociate the coding properties of cortical and spinal neurons. Earlier studies described the distribution of PDs of cortical neurons as uniform (Georgopoulos et al. 1982), biased in a manner consistent with motor habits (Naselaris et al. 2006), or bimodal in a manner similar to the distribution of muscle PDs (Scott et al. 2001; Kurtzer et al. 2006; Herter et al. 2007). In our study, we limited behavior to a wrist task and found a discrepancy in the behavior of cortical and spinal neurons: Although cortical neurons had uniformly distributed PDs, spinal PDs were biased in a manner which at least in some cases was consistent with an uneven representation of flexor versus extensor muscles (Perlmutter et al. 1998). This discrepancy in PD distribution between cortical and spinal neurons might be 1912 Translation of Transient Cortical Commands into a Sustained Signal d Shalit et al. interpreted as further evidence for the transformation of the more general cortical command into a muscle-based command (Harel et al. 2008). In this study, we employed a population-based approach, pooling single neurons in each site to reveal a global coding scheme. This approach is consistent with previous attempts to identify motor cortical signals (Georgopoulos et al. 1986). Clearly, averaging across all neurons may mask the heterogeneity of the single-cell response profile. Nonetheless, analyzing single cell (and muscle) response profiles confirmed the validity of this approach as we found no multimodal distribution of response properties as might be expected if there were a few subpopulations among cortical (or spinal) neurons. Moreover, we found no unique relations between subgroups of neurons (e.g., cortical neurons recorded from CS sites in which stimulation evoked an orthodromic spinal response) and response profiles. This indicates that the phasic response profile of cortical neurons is a general phenomenon that also holds for output sites, suggesting that the translation to a tonic pattern most likely occurs downstream to M1. This result appears to be at odds with some evidence suggesting that the motor cortex contains specific subgroups of neurons which may act as low-level controllers, such as corticomotoneuronal (CM) cells which in some cases fire in a manner consistent with the temporal profile of the produced torque (Fetz and Cheney 1979; Cheney and Fetz 1980). It should be noted, however, that CM neurons constitute only a small fraction of motor cortical neurons (Porter and Lemon 1993), especially in terms of wrist movements and even these neurons have diverse response profiles (Hepp-Reymond et al. 1978). In addition, for spinal INs, no correlation was found between response profile and connectivity with muscles (Perlmutter et al. 1998), thus making it reasonable to expect that the response profile of neurons should be more tightly correlated with their input pattern and not with their output connectivity. It should also be noted here that many studies have emphasized the diversity of spinal INs (Jankowska 1992), a feature which was not addressed in our study. It may have been the case that our criterion for using unimodally tuned INs to measure response profiles restricted the population of tested INs to a more homogeneous subgroup, as reflected by the narrow distribution of PTIs. A more comprehensive analysis is required to further identify these neurons in terms of their input and output connectivity. The transient nature of the cortical signal could suggest cortical control of time-derivative motor parameters (e.g., velocity or torque derivative in isometric conditions) acting only at times of change in torque levels (Moran and Schwartz 1999). Furthermore, the discrepancy in preferred targets found for cortical neurons during torque onset and offset may suggest that cortical neurons code for torque direction, whereas spinal neurons code for torque level. However, we found that cortical information about target location substantially preceded the actual action and hence was available hundreds of milliseconds before any torque change could be detected (or controlled for) by this system. This delay is longer than the estimated lag between cortical signal and muscle activity, which was reported to be about 100 ms (Moran and Schwartz 1999). Furthermore, the possibility that cortical neurons simply code for torque derivative is inconsistent with our previous results (Yanai et al. 2008) showing that motor cortical neurons operate in a different coordinate frame than muscles. Therefore, while motor cortical neurons often code information at times of change in the motor state, they do not appear to code the time derivative of low-level parameters per se. Combining the results obtained in this study with previous results showing that just before movements cortical neurons operate in a coordinate frame which is in-between external and internal suggests that to translate the cortical signal into a muscle command the following steps take place: 1) rotation and scaling of arriving signals to complete the transformation from target space into muscle space and 2) transformation of a transient command into sustained firing which is suitable for continuous activation of the muscles. This process is responsible for decoding the integrated cortical command to eliminate the nonrelevant space-based components it contains. The exact subcortical site (or sites) at which these events take place remains unclear, and the involvement of subcortical but supraspinal sites cannot be ruled out. However, several spinal mechanisms may contribute to these processes. Specific termination patterns of corticospinal fibers may generate an independent representation of some motor parameters while averaging out redundant (e.g., external-related) information. Intrasegmental circuitry may act as a ‘‘latch’’ in translating a transient signal into sustained firing and further enhancing an independent representation of motor variables. In this context, neuromodulatory control (Kiehn et al. 1996; Heckman et al. 2004) may participate in prolonging cortical impact. Lastly, interactions between peripheral and spinal circuitry may provide the required rescaling of the uniform distribution of PDs into a biased, muscle-like representation as well as contributing to the persistent coding of stable motor states such as posture. Funding Israel Science Foundation grants (ISF-1490/09); Binational Science Foundation (BSF-2007442); Baruch Foundation; Rosetrees Foundation. Notes We thank Eli Nelken for insightful discussions which greatly contributed to this work. Conflict of Interest : None declared. References Amirikian B, Georgopoulos AP. 2000. Directional tuning profiles of motor cortical cells. Neurosci Res. 36:73--79. Baldissera F, Hultborn H, Illert M. 1981. Integration in spinal neuronal systems, V.B. Brooks, Editor, Handbook of Physiology. The Nervous System, Vol. II Am. Physiol. Soc, Bethesda pp. 509--595 Motor control. Part 1. Cabel DW, Cisek P, Scott SH. 2001. Neural activity in primary motor cortex related to mechanical loads applied to the shoulder and elbow during a postural task. J Neurophysiol. 86:2102--2108. Cheney PD, Fetz EE. 1980. Functional classes of primate corticomotoneuronal cells and their relation to active force. J Neurophysiol. 44:773--791. Cover TM, Thomas JA. 2006. Elements of information theory. New York: Wiley-Interscience. Crammond DJ, Kalaska JF. 1996. Differential relation of discharge in primary motor cortex and premotor cortex to movements versus actively maintained postures during a reaching task. Exp Brain Res. 108:45--61. Fetz EE, Cheney PD. 1979. Muscle fields and response properties of primate corticomotoneuronal cells. Prog Brain Res. 50: 137--146. Georgopoulos AP. 1996. On the translation of directional motor cortical commands to activation of muscles via spinal interneuronal systems. Brain Res Cogn Brain Res. 3:151--155. Georgopoulos AP, Kalaska JF, Caminiti R, Massey JT. 1982. On the relations between the direction of two-dimensional arm movements and cell discharge in primate motor cortex. J Neurosci. 2:1527--1537. Georgopoulos AP, Schwartz AB, Kettner RE. 1986. Neuronal population coding of movement direction. Science. 233:1416--1419. Harel R, Asher I, Cohen O, Israel Z, Shalit U, Yanai Y, Zinger N, Prut Y. 2008. Computation in spinal circuitry: lessons from behaving primates. Behav Brain Res. 194:119--128. He SQ, Dum RP, Strick PL. 1993. Topographic organization of corticospinal projections from the frontal lobe: motor areas on the lateral surface of the hemisphere. J Neurosci. 13:952--980. Heckman CJ, Kuo JJ, Johnson MD. 2004. Synaptic integration in motoneurons with hyper-excitable dendrites. Can J Physiol Pharmacol. 82:549--555. Hepp-Reymond MC, Wyss UR, Anner R. 1978. Neuronal coding of static force in the primate motor cortex. J Physiol (Paris). 74:287--291. Herter TM, Kurtzer I, Cabel DW, Haunts KA, Scott SH. 2007. Characterization of torque-related activity in primary motor cortex during a multijoint postural task. J Neurophysiol. 97:2887--2899. Jankowska E. 1992. Interneuronal relay in spinal pathways from proprioceptors. Prog Neurobiol. 38:335--378. Johnson PB, Ferraina S, Bianchi L, Caminiti R. 1996. Cortical networks for visual reaching: physiological and anatomical organization of frontal and parietal lobe arm regions. Cereb Cortex. 6:102--119. Kakei S, Hoffman DS, Strick PL. 1999. Muscle and movement representations in the primary motor cortex. Science. 285:2136--2139. Kakei S, Hoffman DS, Strick PL. 2001. Direction of action is represented in the ventral premotor cortex. Nat Neurosci. 4:1020--1025. Kalaska JF. 2009. From intention to action: motor cortex and the control of reaching movements. Adv Exp Med Biol. 629:139--178. Kalaska JF, Cohen DA, Hyde ML, Prud’homme M. 1989. A comparison of movement direction-related versus load direction-related activity in primate motor cortex, using a two-dimensional reaching task. J Neurosci. 9:2080--2102. Kalaska JF, Scott SH, Cisek P, Sergio LE. 1997. Cortical control of reaching movements. Curr Opin Neurobiol. 7:849--859. Kiehn O, Johnson BR, Raastad M. 1996. Plateau properties in mammalian spinal interneurons during transmitter-induced locomotor activity. Neuroscience. 75:263--273. Kurtzer I, Herter TM, Scott SH. 2005. Random change in cortical load representation suggests distinct control of posture and movement. Nat Neurosci. 8:498--504. Kurtzer I, Herter TM, Scott SH. 2006. Nonuniform distribution of reachrelated and torque-related activity in upper arm muscles and neurons of primary motor cortex. J Neurophysiol. 96:3220--3230. Lemon RN. 2008. Descending pathways in motor control. Annu Rev Neurosci. 31:195--218. Moran DW, Schwartz AB. 1999. Motor cortical representation of speed and direction during reaching. J Neurophysiol. 82:2676--2692. Morrow MM, Jordan LR, Miller LE. 2007. Direct comparison of the taskdependent discharge of M1 in hand space and muscle space. J Neurophysiol. 97:1786--1798. Naselaris T, Merchant H, Amirikian B, Georgopoulos AP. 2006. Largescale organization of preferred directions in the motor cortex. I. Motor cortical hyperacuity for forward reaching. J Neurophysiol. 96:3231--3236. Nelken I, Chechik G, Mrsic-Flogel TD, King AJ, Schnupp JW. 2005. Encoding stimulus information by spike numbers and mean response time in primary auditory cortex. J Comput Neurosci. 19:199--221. Panzeri S, Biella G, Rolls ET, Skaggs WE, Treves A. 1996. Speed, noise, information and the graded nature of neuronal responses. Network. 7:365--370. Perlmutter SI, Maier MA, Fetz EE. 1998. Activity of spinal interneurons and their effects on forearm muscles during voluntary wrist movements in the monkey. J Neurophysiol. 80:2475--2494. Porter R, Lemon RN. 1993. Corticospinal function and voluntary movement. Oxford: Calrendon Press. Cerebral Cortex August 2012, V 22 N 8 1913 Prut Y, Perlmutter SI. 2003a. Firing properties of spinal interneurons during voluntary movement. I. State-dependent regularity of firing. J Neurosci. 23:9600--9610. Prut Y, Perlmutter SI. 2003b. Firing properties of spinal interneurons during voluntary movement. II. Interactions between spinal neurons. J Neurosci. 23:9611--9619. Schwartz AB, Moran DW, Reina GA. 2004. Differential representation of perception and action in the frontal cortex. Science. 303:380--383. Scott SH, Gribble PL, Graham KM, Cabel DW. 2001. Dissociation between hand motion and population vectors from neural activity in motor cortex. Nature. 413:161--165. Scott SH, Kalaska JF. 1995. Changes in motor cortex activity during reaching movements with similar hand paths but different arm postures. J Neurophysiol. 73:2563--2567. Scott SH, Kalaska JF. 1997. Reaching movements with similar hand paths but different arm orientations. I. Activity of individual cells in motor cortex. J Neurophysiol. 77:826--852. 1914 Translation of Transient Cortical Commands into a Sustained Signal d Shalit et al. Sergio LE, Kalaska JF. 1997. Systematic changes in directional tuning of motor cortex cell activity with hand location in the workspace during generation of static isometric forces in constant spatial directions. J Neurophysiol. 78:1170-1174. Shah A, Fagg AH, Barto AG. 2004. Cortical involvement in the recruitment of wrist muscles. J Neurophysiol. 91:2445--2456. Todorov E. 2000. Direct cortical control of muscle activation in voluntary arm movements: a model. Nat Neurosci. 3:391--398. Treves A, Panzeri S. 1995. The upward bias in measures of information derived from limited data samples. Neural Comput. 7:399--407. Yanai Y, Adamit N, Harel R, Israel Z, Prut Y. 2007. Connected corticospinal sites show enhanced tuning similarity at the onset of voluntary action. J Neurosci. 27:12349--12357. Yanai Y, Adamit N, Israel Z, Harel R, Prut Y. 2008. Coordinate transformation is first completed downstream of primary motor cortex. J Neurosci. 28:1728--1732.