Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Basis (linear algebra) wikipedia , lookup
Capelli's identity wikipedia , lookup
Quadratic form wikipedia , lookup
Tensor operator wikipedia , lookup
Bra–ket notation wikipedia , lookup
Cartesian tensor wikipedia , lookup
Linear algebra wikipedia , lookup
Linear least squares (mathematics) wikipedia , lookup
Eigenvalues and eigenvectors wikipedia , lookup
Jordan normal form wikipedia , lookup
Matrix (mathematics) wikipedia , lookup
Determinant wikipedia , lookup
System of linear equations wikipedia , lookup
Four-vector wikipedia , lookup
Perron–Frobenius theorem wikipedia , lookup
Singular-value decomposition wikipedia , lookup
Non-negative matrix factorization wikipedia , lookup
Cayley–Hamilton theorem wikipedia , lookup
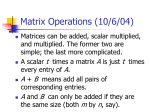
Matrices An m x n matrix is defined as having m rows and n columns. For example: A3 x 2 a11 a12 a21 a22 , a31 a32 A 3 x 2 An m x 1 matrix is defined as a column vector, and a 1 x n matrix is a row vector: c1 cmx1 , r1xn r1 rn , cm c m , r n To add matrices, they must be of the same size: 1 3 5 9 6 12 2 7 1 2.5 1 9.5 For matrix additions, A B C , and cij aij bij . Math additions are associative: A (B C) ( A B) C X Scalar Multiplication: Multiply some scalar number to a matrix: A a11 a12 a21 a22 A Matrix Multiplication: A B C Note: For Matrix Multiplication, inner matrix dimensions must be compatible: Aab Bcd Cad , if b c For Matrix Multiplication, Associative Property Holds, Commutative Property does not. ( A B) C A (B C) AB B A Matrix Multiplication: Matrix multiplication is a systematic process. A step-by-step procedure is given for clarity for A B C : 1. Loop through all rows of matrix A. a. Loop through all columns of matrix B. i. Step through each value of A multiplying it by each value in the column of B, and sum them all up to get the value for C: N cij arnbnj , where N is the inner dimensions of the matrix n 1 ii. Place resulting summed value in the ith row and jth column of C. Example: 1 2 3 9 8 4 5 6 7 6 7 8 9 5 4 9 1 2 3 7 1 9 2 7 3 5 9 14 15 38, c11 38 5 8 1 2 3 6 1 8 2 6 3 4 8 12 12 32, c12 32 4 1 2 3 9 8 38 32 4 5 6 7 6 7 8 9 5 4 9 4 5 6 7 4 9 5 7 6 5 36 35 30 101, c21 101 5 8 4 5 6 6 4 8 5 6 6 4 32 30 24 86, c22 86 4 1 2 3 9 8 38 32 4 5 6 7 6 101 86 7 8 9 5 4 And so forth. These steps are called “inner products” or “dot products” because a row vector multiplied by a corresponding column vector gives a scalar: a1n bn1 c11 c The Identity Matrix: 1 0 0 I 0 1 0 0 0 1 The identity matrix can be any size (square typically) but right or left multiplied against some matrix A gives the original matrix A back. An invertible or non-singular matrix A multiplied by its inverse A-1 is the identity matrix. A matrix is singular if its determinant is 0. det( A) 0 A is singular. The determinant of A is not a measure of how singular a matrix is, it either is or isn’t singular when testing with the determinant. Another test of a matrix is the condition number, which is a ratio of the largest to the smallest singular value of A. A Matrix Transpose is a flip over the matrix diagonal. If A is a 3x2 matrix, AT = 2x3: a1 a 2 a1 a3 a5 A a3 a 4 , AT a 2 a 4 a6 a5 a6 For complex numbers this is different (complex conjugate). We will not be using complex matrix math in NE301 in the near future. A System of Equations: 4x 3y 1 1x 2 y 3 4 3 x 1 1 2 y 3 Ax b A 1Ax A 1b Ix A 1b x A 1b Note: det(A) = -11, and cond(A) = 2.29 or on the order of 100 Remembering back, a system of equations can have one solution, infinite solutions, or no solutions. If a system is over-determined (more equations than unknowns) the system has no exact solution. The least squares fit attempts to fit a model through a data to give the minimum error or best solution through all of the data points. Example: 50 Students perform an experiment to determine the original quantities of three radionuclides in a radioactive sample. Using their laboratory procedure, each student comes up with a row of data as follows: a b c | d , of the form ax by cz d , where x, y, and z are the unknown quantities for three different radionuclides. (50 equations, 3 unknowns, overdetermined). Linear Least Squares Linear Least Squares is a best fit model that is not always numerically stable. If a matrix is near-singular, or the condition number is of the order of machine precision, numerical catastrophe may ensue. Always verify the results make physical sense. Rectangular matrices cannot be inverted. So the basic solution given previously is insufficient. General Model for LLS: Ax b , A mn , m n First we need to make A square. Left multiply both equations by AT: AT Ax AT b The quantity, AT A is now invertible (assuming the matrix is not near-singular) ( AT A) 1 ( AT A) x ( AT A) 1 AT b ( AT A) 1 ( AT A) I Ix ( AT A ) 1 AT b x ( AT A ) 1 AT b The solution is similar to the system of equations prior, with a few extra steps. The vector x now includes the solutions to the system of equations that is a best fit through the data points of the experiment. Computer Examples… Matlab Commands: End command with semicolon and it doesn’t show output. When assigning matrices, a comma moves to the next column slot, and a semicolon moves to the next row: A = [ 1, 2, 3]; Row vector 1 2 3 A = [ 1, 2; 3, 4]; 1 2 2x2 Matrix 3 4 α*A A*B C = A*B A is multiplied by some scalar B is left multiplied by A / A is right multiplied by B Store A*B in C inv(A) Inverse of Matrix A A’ Take the transpose of matrix A det(A) Determinant of A cond(A) Condition number of A