Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
NMDA receptor wikipedia , lookup
Molecular neuroscience wikipedia , lookup
List of types of proteins wikipedia , lookup
G protein–coupled receptor wikipedia , lookup
Multi-state modeling of biomolecules wikipedia , lookup
Paracrine signalling wikipedia , lookup
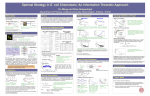
BME 1450 Mid-term Paper 1 E. Coli Chemotaxis as a Basic Systems Biology Model Daniel Cossever Abstract—Chemotaxis of the peritrichous bacterium E. coli is one of the most comprehensively studied and well understood biological processes, whereby a single cell will propel itself to a location of the most favorable environmental conditions. The range of sensitivity to chemoeffectors makes it a one of the simplest examples of the use of integral feedback control loops and robust perfect adaptation. Using a two-state system to model this adaptive behavior provides a means to computationally determine system parameters, allows insight into the understanding into the more complex underlying system interactions, and provides links to finding a truly global cellular model of chemotaxis. A complete systems view of the simple chemotactic system aids in the understanding of yet more complex systems employing the same principles and may also allow the development of future technologies to be designed or optimized using similar models. Index Terms—adaptation, chemotaxis, integral control, systems biology. I. INTRODUCTION B chemotaxis, particularly that which occurs in the bacterium Escherichia coli, is a well studied phenomenon. The interest in E. coli lies in the fact that its simplicity has allowed the identification of the behavioral changes associated with chemotaxis, including the identification of the major biochemical steps in the signal transduction and processing pathways [1]. Every E. coli cell has several flagella spread over their surface (known as peritrichous). These flagella are helical, and thus produce different effects when rotated clockwise and counterclockwise. In an environment that is neutral (contains no chemoattractants or chemoreppellants that bind to E. coli receptors), E. coli moves around in a random fashion produced via two types of movements. The first is counterclockwise flagella rotation that, due to the helical nature of the flagella, causes them to bunch together and propel the cell in a fairly straight, forward manner known as a ‘run’. The other type of movement occurs when the flagella rotate clockwise, causing them to split apart, and produce a random reorientation of the cell, known as a ‘tumble’. In a neutral environment, the run ACTERIAL Manuscript received October 28, 2003. This work was supported in part by the Bloorview Macmillan Children’s Center Research Foundation and the National Science and Education Council. Daniel Cossever is with the Department of Biomaterials and Biomedical Engineering, University of Toronto, Toronto, ON, Canada (e-mail: [email protected]). time is on average 10 times longer than the tumble time [2]. Once the cell is in an environment with a chemoeffector gradient, the ratio between run and tumble time changes. E. coli will migrate to/from a chemoeffector by increasing the run times that propel it in a favorable direction, or conversely, increase tumbling frequency when headed in an unfavorable direction. These flagella changes are due to changes in ligand occupancy (bound receptors indirectly control the flagella motors) and methylation states (sensory adaptation process to unbias sensors after chemoeffector attachment in order to maintain sensitivity) [2]. II. E. COLI CHEMOTAXIS AS A SYSTEM In order to use the information available on the process of E. coli chemotaxis, it is important to understand the process as a whole, rather than as a summation of individual events. This is the basis of systems biology. The process of understanding biological systems as ‘systems’ can be broken down into four steps; system structure identification, system behavior analysis, system control, and system design [4]. A. System Structure Identification This step identifies the physical structure as well as the protein interactions and regulatory relationships of the system [4]. Looking at tar, the E. coli chemoreceptor for the attractant aspartate, can facilitate the system structure understanding of E. coli chemotaxis. Tar is a trans-membrane methyl accepting chemotaxis protein (MCP), which has periplasmic binding sites and cytoplasmic signaling sites. The signals are sent to the flagella motors through a complex sequence of protein interactions [1]. MCPs form a stable complex with two cytoplasmic signaling proteins, CheA and CheW. This complex generates signals (in the form of phosphoryl group (P), caused by the autophosphorylation of CheA when in this complex) used by CheB and CheY effector proteins to control the direction of flagella motor rotation. The phosphorylized CheY (CheYP) interacts with the flagella motor to increase the probability of clockwise rotation (tumbling). CheBP is part of the adaptive circuit that terminates motor response [1]. When attractants are bound to the MCP, the receptor inhibits the autophosphorylation of CheA, and conversely, when there are no bound attractants, the receptor stimulates CheA activity. Therefore, the flux of P to CheB and CheY depend on the ratio of complexes with and without bound attractants, and changes in attractant concentrations alter this BME 1450 Mid-term Paper ratio, triggering flagella response [1]. It must be noted that this is a linear interpretation of the system, where the total output is considered as a simple sum of the individual receptor outputs. There is no consideration for the interaction of receptor complexes or the effect of multiple types of receptors (for different chemoeffectors) on one and other. Regardless, this illustrates the basic mechanism for converting attractants to motor rotation, and thus is adequate in establishing the system structure. . B. System Behavior Analysis The system behavior must be understood in terms of factors such as sensitivity of a behavior against external changes and time to return to normal state after an external stimulus [4]. The sensitivity of the tar chemoreceptors occurs through the change in MCP methylation state. Tar has residues that are reversibly methylated by CheR, and demethylated by CheB. CheR is unregulated, but CheB, as mentioned above, is controlled by the phosphorylation of CheA. Therefore, the receptor methylation is regulated through a feedback from the MCP complex. Both attractant binding and receptor demethylation promote low CheA activity, while lack of attractant and/or methylation cause high CheA activity. When there is a combination, such as an attractant bound receptor that is not highly methylated, CheA is only able to autophosphorylate at a fairly low rate. This feature allows the cell to remain sensitive to small changes in concentration gradients, even in a high concentration environment [1]. 2 known as robustness, which is an important factor in many biological systems. This perfect adaptation is an inherent attribute of the system, and is independent of the system parameters. Therefore, cells that are genetically identical may exhibit different unstimulated behavior, likely due to factors such as differences in signaling protein concentrations, but each cell can return precisely to its unique initial behavior following a stimulus [3]. E. coli is sensitive to a range of concentration levels over a range of five orders of magnitude, yet can still sense changes in the ratio of bound receptors as low as 0.1% per second [1] The robustness of the circuit, or perfect adaptation over a wide range of concentrations, comes from integral feedback control. The chemotaxis circuit incorporates this integral feedback control, where the difference between the current and base output is integrated over time and fed back into the system. [3] Fig. 2. Simple control model of integral feedback, where u is the input (chemoeffector) for process k. The difference of the actual output, y1, versus the steady state output, y0, represents the normalized output, y (receptor activity). The time integral of y, x (methylation level of receptors), is fed back into the system Fig. 1. Schematic cycle of protein interactions causing flagella motor rotation and methylation of receptor complexes in E. coli chemotaxis. To affect the flagella motor, CheYp must reach the motor before decaying. This is made more difficult by CheZ, which breaks down CheYp, and by the fact that phosphorylation enhances the affinity of CheY for CheZ. This likely is a mechanism to reduce the effects of random fluctuations of CheYp production, only letting a sustained synthesis of CheYp overwhelm CheZ and reach the flagella motors [3]. Experimentally it has been found that perturbations to the component parameters (reaction rates constants, protein concentration, etc.) can dramatically affect the behavior of the system. Regardless of these changes, E. coli still retains the ability to precisely restore its prestimulus behaviors. This is Receptor methylation is slow in comparison to CheY phosphorylation. The reaction to an external stimulus is in the range of milliseconds, while the time to reset the prestimulus value so that the steady state behavior is independent of the concentration of a homogeneous distribution of attractant is in the order of minutes [6]. This scenario looks at the summation of individual receptors as the input for the system behavior. There is the likelihood that MCP’s interact with each other to form a receptor patch. In this case, sensitivity of the system could be augmented if binding of a single ligand produced a disproportionately large response by triggering kinase regulation in other MCPs. By the same idea, if coupling between MCP were adjustable according to methylation, the range of stimulus on a cellular level would be dramatically increased. This is the next step in a true systems level understanding, where the single interactions that comprise the basic control system are integrated to provide an overall cellular control system [3]. Even further in determining a true cellular level control system is to integrate any cross talk between signaling pathways for different chemoreceptors. A single E. coli cell has approximately 30 similar two-component regulatory systems BME 1450 Mid-term Paper operating simultaneously. The insulation between signals is likely not perfect, or designed as to provide redundancy of sorts. The interaction of such crosstalk might also be a factor in the process optimization [3]. C. System Control Generally, this step is to use the previous two steps in order to establish a method to control the state of the biological system as needed [4]. This is because system biology is more than just the understanding on a systems level, it is the science by which this information can be used in order to augment understanding and usability of the system. In this case, control of the runs and tumbles is desired in order to keep the cell in its optimal environment. Therefore, the question of control is related to the optimization of the system, rather than the ability to have control over the state it is in. In order to understand this optimization of the system, it is necessary to model it in order to be able to control the system parameters that are critical to such optimization. This also allows the process to undergo computer simulation, and run simulations using different system parameters. Bacterial chemotaxis has served as a prototype for twocomponent regulatory systems, a signaling transduction strategy widely used in prokaryotes, plants, and fungi for response to a broad range of extracellular stimuli. A relatively simple two-state model of the chemotaxis network seems to adequately match experimental data, and a quantitative description of the model comes from a set of coupled differential equations. The main component of the model is the MCP/CheA/CheR receptor complex, modeled as E. It has two functional states, active and inactive (active being the kinase activity of CheA that ultimately sends a signal to the flagella motors). The output is the system activity, A, which is the average number of receptor in the active state (simplified version, assuming no receptor patch). The receptor activity is probabilistic, and depends on the methylation on m sites (Em, m=1,…,M) (again, simplified assuming no interactive effects), ligand occupancy (Eo, Eu), and activity probabilities (αm for Eum, αmo for Eom). The network input is the ligand concentration, l, while the network output is the average complex activity. Fig. 3. Simplified E. coli chemotaxis network (a) converted into a general two-component regulatory system (b). 3 A quantitative description of the model can then be given by a set of coupled differential equations. B(R) is the concentration of CheB (CheR), Similar equations can be written to describe kinetics of {EmuB}, {EmuR}, Em0, {Em0B} and {Em0R}. For fixed αm and αm0 the biochemical parameters of this system include nine different rate constants (kl, k-l, ar, a'r, dr, kr, ab, db, kb) and three enzyme concentrations (total concentrations of CheR, CheB and receptor complexes). This is not the only model possible, but the simplest one that is consistent with experimental data. The three main assumptions of this model are as follows; ligand binding is rapid and independent of receptor activity and degree of methylation, methylation and demethylation are slower events, and CheB demethylates only active receptors (important property for robust adaptation). Although these are assumptions, they have generally been verified as correct through experimentation [8]. Robust adaptation is shown to be maintained even with a wide range of variation in network protein concentrations. E. coli exhibits adaptation precision as a robust property, while other properties, such as adaptation time and steady state behavior may be dependent on biochemical parameters. Therefore, the parameters that are part of the robust adaptation do not need to be robust themselves. This is due to the fact that only properties that are critical to network functionality are actually required to be robust, as to deal with natural variations. This means that exact adaptation is required for chemotaxis, whereas chemotaxis ability is not dependent on precise adaptation time or tumbling frequency. This has been shown by experiment, where mutant bacteria show an inability to taxi when selected Che proteins are deleted, even though steady state tumbling frequency matches that of normal E. coli. Conversely, cells with regular protein makeup will have comparable taxiing ability, regardless of variations in tumbling frequencies [7]. Although this simple model aids in the understanding of the system, the goal of systems biology is to have a true systems model, where not only the interaction between signaling complexes is taken into account, but the interaction with other cellular processes are as well. There are several other considerations for a true systems model. The spatial organization of the circuit elements in the cell, for example, is not taken into account in this model. Since the phosphates will tend to dissociate from CheYP, the distance traveled (and thus travel time) will determine the total amount of motor input that BME 1450 Mid-term Paper will be received. Related to this is the fact that CheZ is absent from the model, and the inhibitory effects of CheZ on CheY P are therefore neglected [2]. Once a true systems model of chemotaxis has been created, it must then be integrated with other E. coli biological networks to have a true cellular model. D. System Design Ultimately, all the previous steps are used in order to establish technologies that allow the design of useful biological systems. The conversion of information from an extracellular messenger to a usable intracellular form is an important process in multicellular and unicellular organisms, and the process of signal transduction is used in both prokaryotes and eukaryotes alike. Every type of cell that uses this process of communication does so in a different manner, but all exhibit a number of common operating principles. As such, details into the nature of operation of the signaling and feedback systems of simple E. coli chemotaxis may offer insights as to the functioning of other more complex systems [3]. A good example of using the simple E. coli example of robust perfect adaptation to understand a more complex system is when compared with the human homeostatic system. The maintenance of physiological conditions is the backbone of homeostasis, where concentrations, enzyme activity, etc. are held in a very narrow range. Robust tracking is necessary for maintenance of a steady state value, and as seen with E. coli, can be implemented with a simple biochemical network. As such, it seems logical that integral control is an important strategy for maintaining a homeostatic environment. The levels of second messengers, such as calcium, fluctuate drastically in response to internal and external factors. Integral control, with calcium as the input, and the enzyme that create/remove these molecules are the output, can provide a robust mechanism for restoring initial concentrations to the optimal steady state levels [6]. Associated with the human homeostatic system is the secretion of powerful hormones that are required to counter or create effects over a wide range, and return exactly to a set point. There is evidence that counter-regulatory pairs of hormones operate as integral controllers, where a steady state disturbance will always be brought back to a set point by responding to the time integral of a disturbance induced error (time multiplied by error). For example, the insulin output from a glucose-deprived pancreas will not increase proportionally to the lack of glucose, but a progressively increasing insulin output with time [5]. Integral control is not only an important strategy for homeostasis on a cellular and organism level, but may well be applicable even for an ecosystem level. Outside of biological systems, we find integral feedback in all types of man-made machines. Many aspects of aircraft, from circuits to instruments to actuators, and even the whole aircraft (autopilot) use integral control loops. Electric grids use these types of loops to regulate voltage and frequency throughout their networks. Integral control is also found in oil 4 refineries, and even in network computers to regulate internet traffic [6]. When trying to reverse engineer a biological system, mechanisms such as integral feedback control become very important. When a system is observed to have robust adaptation, then integral feedback control must be a property of the system. Therefore, based on external behavior, possible internal mechanism could be greatly constrained. It would therefore be helpful to catalogue the types of biological networks that may exhibit this, and more sophisticated types of integral feedback control to understand the underlying need for such a type of system [6]. III. CONCLUSION The thorough characterization of the biological processing network of E. coli chemotaxis makes it an excellent model for computer simulations in the field of systems biology, as well as a prototype for two-component regulatory systems. Although the model is rudimentary in certain aspects, the results of the model fit very closely to experimental data, suggesting that the more important parameters have been considered. A possible next step would be to move away from simplified models that have wide applicability, towards a more detailed model that includes all interaction, such as receptor patches and all proteins. Although such a model would be only applicable to E. coli, explanations of more complex features of the system would aid in the understanding of similar traits in more complex networks. It would also be great help when designing artificial biological systems requiring an even greater range of sensitivity than currently seen with bacterial chemotaxis. REFERENCES [1] Bourret, RB; Stock, AM, “Molecular information processing: Lessons from bacterial chemotaxis”, J BIOL CHEM, 277 (12): 9625-9628 MAR 22 2002 [2] Yi, TM; Huang, Y; Simon, MI; et al., “Robust perfect adaptation in bacterial chemotaxis through integral feedback control”, P NATL ACAD SCI USA, 97 (9): 4649-4653 APR 25 2000 [3] Koeslag, JH; Saunders, PT; Wessels, JA, “The chromogranins and the counter-regulatory hormones: Do they make homeostatic sense?”, J PHYSIOL-LONDON, 517 (3): 643-649 JUN 15 1999 [4] Kitano, H, “Systems biology: toward system-level understanding of biological systems”, In Foundations of Systems Biology (Kitano, H., ed.), pp. 1 -- 36, The MIT Press [5] Alon, U; Surette, MG; Barkai, N; et al., “Robustness in bacterial chemotaxis”, NATURE, 397 (6715): 168-171 JAN 14 1999 [6] Strong, SP; Freedman, B; Bialek, W; et al., “Adaptation and optimal chemotactic strategy for E-coli”, PHYS REV E, 57 (4): 4604-4617 APR 1998 [7] Spiro, PA; Parkinson, JS; Othmer, HG, “A model of excitation and adaptation in bacterial chemotaxis”, P NATL ACAD SCI USA, 94 (14): 7263-7268 JUL 8 [8] Barkai, N; Leibler, S, “Robustness in simple biochemical networks”, NATURE, 387 (6636): 913-917 JUN 26 1997