Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Hydraulic machinery wikipedia , lookup
Magnetohydrodynamics wikipedia , lookup
Compressible flow wikipedia , lookup
Stokes wave wikipedia , lookup
Flow measurement wikipedia , lookup
Accretion disk wikipedia , lookup
Aerodynamics wikipedia , lookup
Lattice Boltzmann methods wikipedia , lookup
Airy wave theory wikipedia , lookup
Fluid thread breakup wikipedia , lookup
Flow conditioning wikipedia , lookup
Bernoulli's principle wikipedia , lookup
Navier–Stokes equations wikipedia , lookup
Computational fluid dynamics wikipedia , lookup
Reynolds number wikipedia , lookup
Derivation of the Navier–Stokes equations wikipedia , lookup
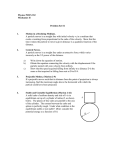
The Reynolds Transport Theorem The basic equations given in section (), involving the time derivative of extensive properties (mass, linear momentum, angular momentum, energy) are required to analyse any fluid problem. In solid mechanics, we often use a system representing a quantity of mass of fixed identity. The basic equations are therefore directly applied to determine the time derivatives of extensive properties. However, in fluid mechanics it is convenient to work with control volume, representing a region in space considered for study. The basic equations based on system approach can not directly applied to control volume approach. Fig. illustrates different types of control volume: fixed control volume, control volume moving at a constant speed and deforming control volume. In this section, it is aimed to derive a relationship between the time derivative of system property and the rate of change of that property within a control volume. This relationship is expressed by the Reynolds Transport Theorem (RTT) which establishes a link between the system and control volume approaches. Before deriving the general form of the RTT, a derivation for one dimensional fixed control volume is explained in the next section. One- dimensional fixed control volume: Consider a diverging (expanding) flow field bounded by a stream tube. The chosen control volume is to be fixed between section ‘a’ and section ’b’. Note that both the sections are normal to the direction of flow. At initial time t, System I exactly coincides with the chosen control volume. This assumption says that the system and control volume are identical at that time. At time t t , System-I has moved in the flow direction at uniform speed v and a part of system II has entered into the control volume. Let ‘N’ represent any properties of the fluid (mass, momentum, energy) and then represent the amount of ‘N’ per unit mass (known as intensive property) in a small proportion of the fluid. The total amount of ‘N’ in a control volume is expressed as N dm dv where cv cv dN dm As the system coincides with the control volume at time ‘t’, a relation between the system and the control volume is N system,t Ncv ,t At time t d t , N system,t t N cv ,t dt N II , t dt N I ,t dt Using the definition of derivative, we can write, dN sys dt lim t o lim N sys ,t dt N sys ,t t N cv,t t N cv,t t t o lim N II ,t t t t o lim t o N I ,t t t or dN sys dt the time rate of change of N of the system dN cv Nin ,t t N out ,t t dt the rate of change the flux of N the flux of N of N within the passing into the passing out the Control volume control surface control surface The influx rate of N through the control surface can be computed as N in ,t t lim N II ,t t t Av II t 0 where N II ,t t Av II t Finally, Equation ( ) becomes dN sys dt dNcv Av II Av I dt This equation implies that the time rate of change of any extensive property for a system is equal to the rate of change of that extensive property inside the control volume plus the net efflux of the property through the control surface. This is known as Reynolds Transport Equation which relates the change of a property of a system to the change of that property for a control volume. Arbitrary Fixed Control Volume As similar to the previous derivation, consider a fixed control volume with an arbitrary flow pattern passing through. At time t the system coincides with the control volume which is fixed relative to the x, y, and z axes. At time t t , the system has moved and occupies the region II and III as shown in Fig.#. Note that the region II is common to the system at both times t and t t . The time rate of change of ‘N’ for the system can be given by 1 dN lim dv dv dv dv dt system t 0 t III II II t t I t Rearranging the above equation we have dN dt system dv dv dv dv III t t II t III t t I t lim lim lim t 0 t 0 t 0 t t t As t 0 region II occupies the same space of control volume and the first term on the d right side of the above equation becomes dv . The integral for region III dt cv approximates the amount of ‘N’ that has crossed the control surface ABCD shown in Figure.#. α Let an area dA on the control surface where a steady flow velocity v is attained during time interval, t , the interface has moved a distance V dt along a direction which is tangential to streamline at that point. The volume of the fluid swept across the area dA is dv V .dt dA cos Using the dot product we can define dv V . nˆ dA dt So, the integral for the region III, is expressed by substituting dv . Efflux rate through control surface ABC is V .nˆ dA ABC Similarly, the influx rate through control surface ADC can be expressed Influx rate: V . nˆ dA ADC The negative sign indicates influx rate of N pass through the control surface. The net efflux rate of N through the whole control surface is Efflux rate on ABC influx rate on ADC Net efflux rate Vn dAt V .n dA ABC ADC V .nˆ dA Control surface Collecting the terms of equation ( ) gives the compact from of RTT as d dN dv V .nˆ dA dt sys dt cv control surface The above equation states that the time rate of change of property N within a system is equal to the time rate of change of property N within the arbitrary shaped control volume plus the net rate of efflux of the property across the control surface. Special Cases Control volume moving at constant velocity: In the case of fixed control volume the velocity field was measured with reference to x, y, z axes. If the control volume moves at a uniform velocity Ve it is necessary to compute relative velocity Vr of fluid crossing the control surface. The relative velocity becomes Vr V Ve . The flux terms are to be defined in terms of Vr , but the volume integral remains unchanged when the control volume does not deform. The RTT for a uniformly moving control volume is d dN dv p Vr nˆ dA dt sys dt cv contrl surface Types of Fluid Flow Laminar and Turbulent flow In fluid flows, there are two distinct fluid behaviors experimentally observed. These behaviors were first observed by Sir Osborne Reynolds. He carried out a simple experiment in which water was discharged through a small glass tube from a large tank (the schematic of the experiment shown in Fig.). A colour dye was injected at the entrance of the tube and the rate of flow could be regulated by a valve at the out let. When the water flowed at low velocity, it was found that the die moved in a straight line. This clearly showed that the particles of water moved in parallel lines. This type of flow is called laminar flow, in which the particles of fluid moves along smooth paths in layers. There is no exchange of momentum from fluid particles of one layer to the fluid particles of another layer. This type of flow mainly occurs in high viscous fluid flows at low velocity, for example, oil flows at low velocity. Fig. shows the steady velocity profile for a typical laminar flow. When the water flowed at high velocity, it was found that the dye colour was diffused over the whole cross section. This could be interpreted that the particles of fluid moved in very irregular paths, causing an exchange of momentum from one fluid particle to another. This type of flow is known as turbulent flow. The time variation of velocity at a point for the turbulent flow is shown in Fig. Turbulent It means that the flow is characterized by continuous random fluctuations in the magnitude and the direction of velocity of the fluid particles. Velocity Field Consider a uniform stream flow passing through a solid cylinder (Fig.). The typical velocities at different locations within the fluid domain vary from position to position at a particular time t. At different time instants this velocity distribution may change. Keeping this observation in mind, the velocity within a flow domain can be represented as function of position (x, y, z) and time t. In the Cartesian co-ordinates the variation of velocity can be represented as a vector V uiˆ vjˆ wkˆ where u, v, w are the velocity scalar components in x, y and z directions respectively. The scalar components u, v and w are dependent functions of position and time. Mathematically we can express them as u u x, y , z , t v v x, y , z , t w w x, y , z , t This type of continuous function distribution with position and time for velocity is known as velocity field. It is based on the Eularian description of the flow. We also can represent the Lagrangian description of velocity field. Let a fluid particle exactly positioned at point A moving to another point A during time interval t . The velocity of the fluid particle is the same as the local velocity at that point as obtained from the Eulerian description At time t, V particle at x, y, z t V x, y, z, t At time t t , V particle at x, y , z t t V x, y, z, t t This means that instead of describing the motion of the fluid flow using the Lagrangian description, the use of Eularian description makes the fluid flow problems quite easier to solve. Besides this difficult, the complete description of a fluid flow using the Lagrangian description requires to keep track over a large number of fluid particles and their movements with time. Thus, more computation is required in the Lagrangian description. The Acceleration field At given position A, the acceleration of a fluid particle is the time derivative of the particle’s velocity. Acceleration of a fluid particle: a particle dVparticle dt Since the particle velocity is a function of four independent variables (x, y, z and t), we can express the particle velocity in terms of the position of the particle as given below a particle dVparticle dt dV x particle , y particle , z particle dt Applying chain rule, we get a particle V dt V dx particle V dy particle V dz particle . t dt x particle dt y dt z dt Where and d are the partial derivative operator and total derivative operator respectively. The time rate of change of the particle in the x-direction equals to the xcomponent of velocity vector, u. Therefore dx particle Similarly, dt dy particle dt dz particle dt u v w As discussed earlier the position vector of the fluid particle (xparticle, y particle, z particle) in the Lagranian description is the same as the position vector (x, y, z) in the Eulerian frame at time t and the acceleration of the fluid particle, which occupied the position (x, y, z) is equal to a( x, y, z, t ) in the Eularian description. Therefore, the acceleration is defined by V V V V a x, y , z ,t u v w t x y z In vector form a x , y , z ,t V t V . V local accelaration convective accelartion where is the gradient operator. The first term of the right hand side of equation represents the time rate of change of velocity field at the position of the fluid particle at time t. This acceleration component is also independent to the change of the particle position and is referred as the local acceleration. However the term V . V accounts for the affect of the change of the velocity at various positions in this field. This rate of change of velocity because of changing position in the field is called the convective acceleration. Deformation of fluid particles Fig. illustrates the deformation of three fluid particles originating from a uniform stream flow. The fluid particle ‘A’ of a definite shape (square in this example) moves from its initial position along the direction of stream flow. As there is no significant velocity gradient, the particle has undergone only translation motion without any deformation. But in the case of the particle B, it can easily be seen that the particle rotates in clockwise direction near the obstruction. This results due to the presence of the velocity gradient at that region. So, this type of motion of a fluid particle is known as rotation. The particle C moves in the region of high velocity gradient. Therefore, the particle is deformed volumetrically and is also undergoes angular deformation because of nonuniform distribution of velocity in the path x and y directions. In short the types of primary motion of a fluid particle are described in four ways: (a) translation (b) rotation (c) linear deformation and (d) angular deformation. Rotation Consider a two dimensional fluid particle motion in a fluid flow domain. The flow velocity at point ‘A’ of the particle is expressed as V uiˆ vjˆ As per the continuum hypothesis the velocity components u and v are continuous functions of space and time. The velocity at point A can be expressed using the Taylor series u 2u x u x x, y at A u x, y x 2 x x 2 2 Neglecting the second and higher order terms in the above expression we obtain u x x, y u x, y u x x Similarly the velocity components at point B and A can be derived. The pure rotation of the element is resulted from v-velocity component at point A and the u-velocity component at point B. The angle 1 rotated during time t v v x t vt v x 1 t x x u u y t ut y u t similarly, 2 y y The negative sign has been introduced because of clockwise rotation. The average rotation angle is 1 1 2 2 Thus, the rate of rotation in the x and y planes becomes w d 1 v u dt 2 x y In three dimension we can express rate of rotation or angular velocity in vector form as 1 w v ˆ 1 u w ˆ 1 v u ˆ w i k j 2 y z 2z x 2x y Linear deformation In fluid mechanics the rate of linear deformation is emphasized instead of linear deformation in solid mechanics. The rate of linear deformation or linear strain rate is the rate of increased or decreased length per unit length. Consider two points P and Q located on a fluid particle in the x-direction. The velocity at u x respectively. During time t , P moves to P pint P and Q at time t are u and u x and Q to Q . The rate of linear deformation xx is PQ PQ 1 xx lim t 0 PQ t u u x t x ut x x lim t 0 x t xx Thus u x Similarly linear strain rate in other directions are v y w zz z yy Angular deformation: As shown in figure#, angular deformation at point P is defined as the half of the rate of the angle decreased between two mutually perpendicular axes. The angle between these two axes decreases from / 2 to / 2 1 2 , as demonstrated in Figure#. The rate of angle 1 , already derived in section() is 1 d1 v dt x The angular deformation in the xy plane is 1 1 2 2 1 v u 2 x y xy Note that 2 is in the clockwise direction. Extending to three dimensions the shear strain rate is given by 1 v u xy 2x y 1 v w yz 2z y 1 w u xz 2 x z