Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Optical flat wikipedia , lookup
Anti-reflective coating wikipedia , lookup
Ultrafast laser spectroscopy wikipedia , lookup
Retroreflector wikipedia , lookup
Magnetic circular dichroism wikipedia , lookup
Laser beam profiler wikipedia , lookup
Chemical imaging wikipedia , lookup
Nonlinear optics wikipedia , lookup
Phase-contrast X-ray imaging wikipedia , lookup
Optical coherence tomography wikipedia , lookup
Optical tweezers wikipedia , lookup
Interferometry wikipedia , lookup
Diffraction topography wikipedia , lookup
Gaseous detection device wikipedia , lookup
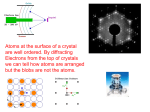
Reflection high-energy electron diffraction wikipedia , lookup
Thomas Young (scientist) wikipedia , lookup
Ultraviolet–visible spectroscopy wikipedia , lookup
Surface plasmon resonance microscopy wikipedia , lookup
X-ray fluorescence wikipedia , lookup
Scanning tunneling spectroscopy wikipedia , lookup
Rutherford backscattering spectrometry wikipedia , lookup
Scanning electrochemical microscopy wikipedia , lookup
Photon scanning microscopy wikipedia , lookup
Vibrational analysis with scanning probe microscopy wikipedia , lookup
Imaging of flexural and torsional resonance modes of
atomic force microscopy cantilevers using optical
interferometry
Michael Reinstaedtler , Ute Rabe , Volker Scherer , Joseph
A.Turner , Walter Arnold
Surface Science 532-535(2003) 1152-1158
Date : 13th October 2005
Presenter : Ashwin Kumar
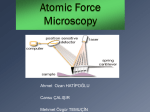
Background - Operation of the AFM
A sharp tip is scanned over the sample surface
the tip is maintained at a constant force (to obtain height
information), or height (to obtain force information) above
the sample surface
Tips are typically made from Si3N4 or Si, and extended
down from the end of a cantilever
An optical detection system is used, in which a diode laser
is focussed on the back of a reflective cantilever
As the tip moves up and down with the contour of the
surface, the laser beam is deflected off the attached
cantilever into a dual element photodiode
AFM Schematic
Background - AFM Modes
Contact Mode
the tip scans the sample in close contact with the surface
The force on the tip is repulsive with a mean value of 10 -9 N
the deflection of the cantilever is sensed and compared in a
DC feedback amplifier to some desired value of deflection
Non-Contact Mode (used when tip contact might alter the
sample surface)
In this mode the tip hovers 50 - 150 Angstrom above the
sample surface
Attractive Van der Waals forces acting between the tip and
the sample are detected
topographic images are constructed by scanning the tip
above the surface
Background - AFM Modes
Tapping Mode:(sample surfaces that are easily damaged )
The cantilever assembly is oscillated at or near the
cantilever's resonant frequency
the cantilever is oscillated with a high amplitude when the
tip is not in contact with the surface
The oscillating tip is then moved toward the surface until it
begins to lightly touch, or tap the surface.
During scanning, the vertically oscillating tip alternately
contacts the surface and lifts off
The reduction in oscillation amplitude is used to identify
and measure surface features.
Motivation
Earlier Work involved determination of contact stiffness
and localized elastic modulus measurement of the surface
The vibrational spectrum of the cantilever is used to
discern local elastic data.
It becomes imperative to understand the vibrational
spectra completely to perform the above mentioned
measurements
The free vibrational response would help to characterize
the cantilever or the probe
Moreover, since the boundary conditions are also changed
during the contact mode resonance, Free vibrational
response and imaging the mode shape would help as a tool
for calibration or standard.
* Ultrasonics 38(2000) 430-437
* Journal of Applied Physics, 82(1997) 966
* Review of Scientific Instruments 67(1996) 3281
In a Nutshell
Excite and Detect the torsional vibrations of the AFM
cantilevers.
Examine the features of the torsional vibration
spectrum
Image the flexural and torsional resonance modes
Use a model based approach to explain the spurious
modes in the spectrum
b
Theory: Problem Statement
a
L
Boundary Conditions :
Flexural Vibrations
Clamped end:
Free End:
y (0, t ) 0
y '(0, t ) 0
y "( L, t ) 0
y "'( L, t ) 0
Torsional Vibrations
Clamped End:
Free End:
(0, t ) 0
'( L, t ) 0
L - length of the beam (m)
a - width of the beam (m)
b - thickness of the beam (m)
E - Elastic Modulus of the beam (N/m2)
I - Area moment of inertia - ab3/12 (m4)
J - Polar moment of inertia - a3b/12 (m4)
G - Rigidity modulus (N/m2)
CT - Torsional Stiffness- ab3G/3 (Nm2)
Theory: Flexural Vibrations
Equation of motion for the bending modes
4 y
2 y
EI 4 A 2 0 (1)
x
t
The general solution of the form
y ( x, t ) (a1e x a2e x a3ei x a4e i x )eit (2)
The dispersion relation:
EI A 0 (3)
4
2
Theory: Flexural Vibrations
Applying the Boundary Conditions:
The Characteristic Equation -
n
cos n L cosh n L 1 0 (4)
Bending-mode eigenfrequencies:
( n L) 2 EI
fn
(5)
2
2 L
A
Amplitude Distribution:
cos n x cosh n x
yn ( x) y0 cos nx cosh nx
sin n x sinh n x (6)
sin n x sinh n x
Theory: Torsional Vibrations
Equation of motion for the torsional modes
2
2
cT 2 J 2 0 (7)
x
t
The general solution of the form
( x) A sin x B cos x (8)
Applying the boundary conditions:
2n 1 b G
fn
(9)
2L a
( x) A sin x (10)
* Jerry
H. Ginsberg , Mechanical and Structural
Vibrations,2001
Experimental Setup
Longitudinal Vs Shear Wave Propogation
Excitation of Torsional Vibrations
Cantilever
Sample
Shear Wave Transducer
Beam Deflection Setup
Spatial variations of reflected beam are detected
Transverse vibrations cause vertical movement
of the spot
Torsional vibrations cause horizontal movement
of the spot
If the light beam moves up or down,
I vertical ( Iupperleft Iupperright ) ( Ilowerleft Ilowerright )
If the light beam moves right or left
I horizontal ( Iupperleft Ilowerleft ) ( Iupperright Ilowerright )
* Handbook of Nano-Technology,Springer,2003
Experimental Results
Optical Micrograph of the cantilever
Interferometric Measuring System
Spot Size : 2-5 microns
Step Size : 2 microns
Optical Detection Of Vibration of the Beam
A=
a*ei(ωt-k(z-2δ))
Incident Beam
Reflected Beam
• Phase Information is lost during Intensity or Power Measurements
• Interferometric systems are used to convert phase change into intensity variations
Michelson Interferometer
Reference Mirror
• AR=ar*ei(t-kzR)
Laser
B.S.
Sample
• AO=ao*ei(t-k(zo-δ))
I D A0 AR
2
2
2
I D aO aR
I D aO aR
2
2
Detector
aR aO
cos k ( z R zO ) 2k
1 2 2
2
aO aR
aR aO
aR aO
1
2
cos
k
(
z
z
)
2
2
k
sin
k
(
z
z
)
R O
R O
2
2
2
2
aO aR
aO aR
Output Intensity Vs Optical Path Length
Relative Intensity
Maximum Slope
Region of
Best Sensitivity
4
2
Path Length Difference (zr-zs)
Heterodyne Interferometry
Reference Mirror
Frequency Shifter
• AR=ar*ei((+)t-kzR)
• AO=ao*ei(t-k(zo-δ))
I D aO aR
2
2
Laser
B.S.
aR aO
cos t k ( z R zO ) 2k
1 2 2
2
a
a
O
R
Sample
Detector
Phase locked loop demodulator
Mixer
LPF2
a1 cos[t k ( zr zo ) 2k ]
O/p
Detector Input
aLO cos(t LO )
VCO
O/P:
LPF1
a1aLO
{cos[k ( zr zo ) LO 2k ] cos[2t k ( zr zo ) LO 2k ]}
2
Amplitude and Phase distribution - Measured
Amplitude and Phase distribution - Calculated
Mode Coupling
Asymmetrical shape of the modes
- Geometrical asymmetries - Tip not aligned with the center of the beam
- Tip is in force interaction with the sample surface
mt - mass of the tip
d
b
d - offset from the center of the beam
h
b - thickness of the beam
h - length of the tip
Mode Coupling
Coupling Description:
- Equation of motion:
4 y
2 y
EI 4 A 2 0 (1)
x
t
2
2
cT 2 J 2 0 (7)
x
t
Boundary Conditions at the free end:(x = L)
d
d ..
..
EIy '''( x, t ) kn y ( x, t ) kn ( x, t ) mt ( y ( x, t ) ( x, t ) (11)
L
L
..
..
ct ( x, t ) kn h ( x, t ) kn dLy ( x, t ) mt d L y ( x, t ) d ( x, t ) (12)
'
2
Mode Coupling
In Case of free oscillations:
d
EIy '''( x) mt ( y ( x) ( x)
L
ct ' ( x) mt d 2 L y ( x) d ( x)
2
From Previous Results:
y ( x) (a1e x a2e x a3ei x a4e i x )
( x) A sin x
Coupling Parameter H :
H 2
H
EIJ
Act L2
Mode Coupling
Calculated Amplitude distribution based on mode coupling with H=0.025
Resonance Mode at 265 Khz
- The mode does not fit into the mode coupling analysis
- Most likely occurs due to nonlinear coupling into flexural motion
d2y
flex (b / 2) 2 105
dx
a
tors
104
L
Conclusion
Verification of standard flexural and torsional modes in the
vibration spectrum by imaging the mode shapes and
comparing them with the model based expected pattern
Mode Coupling due to geometrical and mass asymmetries
account for a number of resonances
Large strain values leads to non-linear mixing of modes
Beam Deflection Setup
Spatial variations of reflected beam are detected
Transverse vibrations cause vertical movement
of the spot
Torsional vibrations cause horizontal movement
of the spot
If the light beam moves up or down,
I vertical ( Iupperleft Iupperright ) ( Ilowerleft Ilowerright )
If the light beam moves right or left
I horizontal ( Iupperleft Ilowerleft ) ( Iupperright Ilowerright )
Background - Operation of the AFM
A sharp tip is scanned over the sample surface
the tip is maintained at a constant force (to obtain height
information), or height (to obtain force information) above
the sample surface
Tips are typically made from Si3N4 or Si, and extended
down from the end of a cantilever
An optical detection system is used, in which a diode laser
is focussed on the back of a reflective cantilever
As the tip moves up and down with the contour of the
surface, the laser beam is deflected off the attached
cantilever into a dual element photodiode
AFM Schematic
Background - AFM Modes
Contact Mode
the tip scans the sample in close contact with the surface
The force on the tip is repulsive with a mean value of 10 -9 N
the deflection of the cantilever is sensed and compared in a
DC feedback amplifier to some desired value of deflection
Non-Contact Mode (used when tip contact might alter the
sample surface)
In this mode the tip hovers 50 - 150 Angstrom above the
sample surface
Attractive Van der Waals forces acting between the tip and
the sample are detected
topographic images are constructed by scanning the tip
above the surface
Background - AFM Modes
Tapping Mode:(sample surfaces that are easily damaged )
The cantilever assembly is oscillated at or near the
cantilever's resonant frequency
the cantilever is oscillated with a high amplitude when the
tip is not in contact with the surface
The oscillating tip is then moved toward the surface until it
begins to lightly touch, or tap the surface.
During scanning, the vertically oscillating tip alternately
contacts the surface and lifts off
The reduction in oscillation amplitude is used to identify
and measure surface features.
Motivation
Earlier Work involved determination of contact stiffness
and localized elastic modulus measurement of the surface
The vibrational spectrum of the cantilever is used to
discern local elastic data.
It becomes imperative to understand the vibrational
spectra completely to perform the above mentioned
measurements
The free vibrational response would help to characterize
the cantilever or the probe
Moreover, since the boundary conditions are also changed
during the contact mode resonance, Free vibrational
response and imaging the mode shape would help as a tool
for calibration or standard.
* Ultrasonics 38(2000) 430-437
* Journal of Applied Physics, 82(1997) 966
* Review of Scientific Instruments 67(1996) 3281