Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
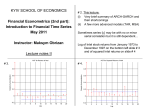
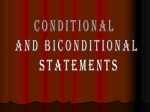
Centre for Central Banking Studies Bank of England Time Series Modelling in Central Banks: An application of ARCH and GARCH models Ibrahim Stevens Centre for Central Banking Studies Bank of England May 2004 Introduction • Objective – Overview of time series modelling techniques – Modelling of volatility clustering • Motivation – Understanding the properties of macroeconomic time series used in central banks • Information extraction to support monetary and financial stability policy decisions – Option pricing, extreme value theory, markets/asset correlations, event studies, risk calibration Structure • Review of key results in econometric time series – Stationary and nonstationary time series processes – Spurious regressions and cointegration and Vector Autoregressions (VARs) • Models of changing volatility – Autoregressive conditional heteroscedasticity (ARCH) – Generalised ARCH (GARCH) Stationary and nonstationary time series processes • Economic time series – Data obtained from observations of an economic variable over time • E.g. Interest rates, stock prices, price indices, GDP, inflation….. • A time series is a stochastic process – A sequence of random variables (RVs): y1, y0 , y1, y2 • We use means, variances and covariances to capture most of the information about the probabilistic structure of time series • A time series is (weakly) or covariance stationary if its probability distribution does not change with time – Constant mean: yt y – Constant variance: Var yt 0 2 t – Covariances: Cov yt , yt k Cov yt , yt k k k • Stationary time series fluctuate around a constant level • Two types of stationary variables – Trend stationary – Differenced stationary • Difficult to distinguish between the two • Variables that needs to be ‘de-trended’ or ‘differenced’ to achieve stationarity are nonstationary – To de-trend a series, subtract if from a time trend – If a time series is integrated or order d, I(d); it has to be differenced at least d times to make it stationary • Integrated series are called unit root processes S&P 500 weekly prices (nonstationary/unit root) S&P 500 weekly return (differenced-stationary) Index 1,800 Continously compounded return 0.10 1,600 0.05 1,400 1,200 0.00 1,000 800 -0.05 600 -0.10 400 200 0 93 94 95 96 97 98 99 00 01 02 03 Source: Bloomberg. -0.15 93 94 95 96 97 98 99 00 01 02 03 Sources: Bloomberg and Bank calculations. Basic Stochastic Processes • Autoregressive (AR) models: yt 0 1 yt 1 2 yt 2 p yt p t • Moving average (MA) models: yt 0 1 t 1 2 t 2 q t q • Autoregressive moving average (ARMA) models: yt 0 1 yt 1 2 yt 2 1 t 1 2 t 2 q t q p yt p t • White noise (WN) process: yt 0 t – A zero-mean, constant variance and no autocorrelation : t is said to be iid (identically and independently distributed) – stationary process • Random walks (RW) (widely used in econometric time series: y y t t 1 t • In a RW, the changes in the levels of the series is determined by the addition of a random error term • RWs may contain a drift term: yt yt 1 t • Stochastic processes are estimated in EViews using the AR and MA functions in the equation window • Two important properties of RWs – Markov property: Only current information is relevant in determining the conditional probability of the future value of the RV – Martingale: the conditional expectation of the future value of a RV is the current value. However, a martingale need not have a constant variance of independent errors. • A RW plus a drift is therefore a martingale – A positive drift term = sub-martingale – A negative drift term is a super-martingales – Practical applications • Are stock prices a RW? • RW and the efficient markets hypothesis (rational expectations) Mean, variance and autocorrelations of a weekly stationary variable • Consider a simple AR(1) model: yt 0 1 yt 1 t – The mean: yt y 0 1 1 2 – The variance : Var yt 0 1 1 – The autocorrelation function (ACF): cov( yt , yt k ) t k 1 ( yt y )( yt k y ) k rk T var( yt ) 0 t k 1 ( yt y ) T • Where k is the is the number of lags and y is the sample mean • The ACF is simple a regression of the variable on a constant and its k-period lagged variables • The partial autocorrelation function (PACF): – Usually calculated by fitting autoregressive models of increasing order and taking the last coefficient in each model as the sample PACF. A cut-off is determined by 2/ T • The Ljung-Box Q-test (Q-stats) is the standard test of the significance of ACF with the null of zero autocorrelation (available in EViews): Q T (T 2) k 1 rk2 /(T k ) s ( m) Identifying difference stationary process: unit roots tests • Recall – A time series, y, is integrated of the order d, denoted as (y ~ I (d)) if it has to be differenced d times to make it stationary, (Δd yt ) • A non stationary (differenced) time series contains at least on unit root • Several methods are available to test for unit roots: Augmented Dickey-Fuller, Phillips-Perron, Kwiatkowski-Phillips-Schmidt-Shin (KPSS) – Other issues : structured breaks, ARCH effects • Stock prices are integrated (unit roots) but stock returns are stationary Spurious regression and cointegration • Spurious regressions – Regressing two non-stationary variables against each other contravenes the assumptions of the classical regression model (stationary variables plus zero-mean and constantvariance innovation term: – …..produces biased standard errors….. – …....and thus biased hypothesis testing • Likely to reject a false null hypothesis and thus accept an incorrect relationship – without any economic meaning – Models with high R2 and low Durbin Watson statistics • Cointegration – Stationarity means that a variable is in statistical equilibrium – The link between nonstationary variables and long-run economic equilibrium is know as cointegration – Formalised in Engle and Granger (1987) • Two variables, are said to be cointegrated of order d, b, denoted CI(d,b), if : – They are both I(d) – And there exist some (cointegrating parameter) such that : et yt xt – When b=1 and d=1, et ~1(0) I (d b), b 0 • Cointegration and error-correction model – Cointegrated processes embody and error-correction mechanism • Engle and Granger (1987) suggest the following procedure: • Stage 1: estimate a long-run cointegrating regression and test for cointegration: yt 0 1 xt ut • Residual-based cointegration test (ut ~ I(0)) use MacKinnon (1991) critical values instead (available in EViews): ut ut 1 et • Stage 2 (if two variables are cointegrated, they have a valid error correction model) : Construct the following error correction model: n n i 1 i 1 n n i 1 i 1 xt 1uˆt 1 B1yt 1 C1xt 1 xt yt 2uˆt 1 B2 xt 1 C2 yt 1 yt • with 1 and 2 ≠ 0 (the speed of adjustment parameters) • The error correction is due to what is known as the Granger representation theorem: a cointegrated system can be represented in autoregressive moving average, or error correction form, but not as a VAR in the differenced variable • Due mainly to the fact that vector MA (VMA) models are noninvertible (the MA terms contain a unit root). – However, this is a problem rectified by the inclusion of the long-run error correction term in the error correction model above. • Multivariate extensions – Johansen’s cointegrating VAR model (The default cointegration method in EViews) – Johansen (1988) and Johansen and Juselius (1990) • Vector error correction models (VECM) – Combine short-run (dynamic model) information with long-run (static model ) information • Practical issues in cointegration and ECM’s: – On average, in each period, a proportion of disequilibrium from the previous period is corrected otherwise, the process will explode to ± - would not return to its equilibrium – This implies that the two variables have a long-run equilibrium • The variables may diverge from their equilibrium relation in the short-run but are forced back to equilibrium – Examples • PPP • Interest rate differentials • Capital market integration Unrestricted VARs, near-VARs and Structural VAR (SVAR) models • We are often interested in the dynamic relationships between variables – But have no strong theory about how they interact • An unrestricted VAR model expresses a random variable as a function of its own lag and lags of other exogenous variables – One equation is estimated for each variables with equal number lags on the right-hand side variables – When there are unequal number of lags of the variable, the system becomes a near-VAR model • VAR models are easy to use and often informative • and are good for making short-term forecasts • By imposing suitable theoretical restrictions (especially on the error structure) we can recover the restricted (or structural) VAR • The unrestricted VAR is a statistical description of the data, the SVAR adds some economics • Innovation accounting methods are used to assess the dynamic response of variables to fundamental shocks – Known as Impulse response functions and variance decompositions • E.g Impulse response functions are used to determine the lags of a monetary transmission mechanism Modelling Changing Volatility • Why changing volatility – Volatility greater during some periods than others • Time-varying risk (conditional variance) characteristics – Implications for asset pricing dynamics – Persistence: volatile periods tends to linger • Positive autocorrelations – Implications for forecasting asset returns – Constant unconditional variance • Due to Engle (1982) and Bollerslev (1986) Conditional and unconditional moments • For the general (zero-mean, constant-variance and iid innovations) AR(1) process: xt a0 a1 xt 1 t – The conditional mean forecast for the next period is: t xt 1 a0 a1 xt – The conditional forecast variance is: 2 2 2 t xt 1 a0 a1xt t t 1 • The unconditional mean converges to the long-run mean: a0 / 1 a1 • The unconditional variance is: xt 1 a0 / 1 a1 2 t 1 a1 t a12 t 1 a13 t 1 / 1 a 2 2 2 1 • The unconditional mean forecast has the greater variance – The conditional mean forecast is preferable • A more accurate measure of asset returns ARCH Processes • Conditional mean is zero: t 1 t 0 • Conditional variance is autoregressive: 0 2 t 2 1 t 1 2 2 t 2 2 q t p • The unconditional mean is zero and unconditional variance is constant Modelling ARCH processes • For a conditional mean-zero t ARCH ( p ) • The ARCH innovations are: t2 0 1 t21 2 t22 p t2 p vt • Where vt is white noise • A valid ARCH requires at least one non-zero coefficient in the ARCH model -The number of significant coefficients determine the order of the ARCH process • To guarantee this, below by -0 0, vt must be bounded from 2 t – which, implies that the error term of the ARCH sequence cannot be Gaussian or normal – Use a square-root process instead: t 0 1 t21 2 t22 – – q t2q wt wt and t 1 are independent 2 wt is iid with wt 0 and wt 1 – The expected values of the squared innovations is therefore equal to the conditional variance GARCH Processes • For similar reasons as the ARCH process write as a 1/ 2 square-root process: t wi ( t ) or t 0 1 t21 p t2 p 1 t21 q t2q wt • The conditional variance is: t2 0 1 t21 p t2 p 1 t21 q t2q Identification and estimation of ARCH/GARCH models • Estimate mean equation assuming constant variance • Test for ARCH effects and evidence of autocorrelation – Use LM-test and Q stats in EViews • If ARCH effects are significant – Re-estimate the model with ARCH innovations • Estimate the mean and variance equation jointly (recursively) using maximum likelihood (LM) • Check for any remaining ARCH effects or residual autocorrelations in standardised and squared-standardised residuals • Test the distributional properties of the innovations The ARCH LM-test • The test statistics is 2 (q ) – Estimate a mean equation with constant variance using ordinary least squares (OLS) and save the innovations (residuals) T R2 – Estimate the squared residuals on a constant and q lags and get the R2 – Test for the presence of ARCH against the null of iid innovations GARCH Simulations • Model 1 – AR(1)-GARCH(1,1) model yt 0.0005 0.6 yt 1 t 0.00008 0.9628 2 2 t 1 0.0318 2 t 1 Innovations Innovation 0.15 0.1 0.05 0 -0.05 0 100 200 300 400 500 600 Conditional Standard Deviations 0 100 200 300 400 500 Returns 0 100 200 300 400 500 700 800 900 1000 600 700 800 900 1000 600 700 800 900 1000 Standard Deviation 0.02 0.015 0.01 0.005 0.1 Return 0.05 0 -0.05 -0.1 GARCH Simulation 2 • Model 2 – ARMA(1,1)-GARCH(1,1) model yt 0 0.6 yt 1 t 0.4 t 1 0.00001 0.8 2 2 t 1 0.1 2 t 1 Innovations Innovation 0.04 0.02 0 -0.02 -0.04 0 100 200 300 400 500 600 Conditional Standard Deviations 0 100 200 300 400 500 Returns 0 100 200 300 400 500 700 800 900 1000 600 700 800 900 1000 600 700 800 900 1000 Standard Deviation 0.014 0.012 0.01 0.008 0.006 Return 0.05 0 -0.05 Some GARCH Extensions • Asymmetric GARCH models (available in EViews) – Exponential GARCH (EGARCH) and – Threshold GARCH (TGARCH) models – GJR-GARCH • Leverage effects in conditional time seriesallowing for the asymmetric effects of positive and negative returns – For example negative shocks to stock returns may have a larger impact on volatility than positive shocks: » The so-called “good news” and “bad news” asymmetric impact on stock returns – implications for monetary policy – Models based on t-density – Long memory GARCH models – Models with changes in regimes Multivariate (MVGARCH) models • A useful tool for computing time-varying (conditional) correlations • Conditional asset pricing models • Studying volatility spillovers between asset markets – feedback effects • The general k-dimensional process is given as: t zt H 1/ 2 t • zt is a k-dimensional mean-zero iid process with covariance matrix equivalent to Ik • The mean of the process is zero: t t 1 0 • The covariance matrix is: t t t 1 H t • Where t1 is the information set in the previous period • Specifying the conditional covariance matrix, is nontrivial • We adopt three approaches here – Diagonal vec model (Bollerslev et. Al. 1988) – The constant conditional correlation (CCC) model (Bollerslev 1990) – The BEKK model (Engle and Kroner 1995) – The dynamic conditional correlation (DCC) model (Engle 2002, Engle and Sheppard 2001) • The diagonal-vec model (bivariate): H t W A1 ( t 1 t1 ) B1 H t 1 • Where is the Hadamard product • The coefficient matrices (W, A, B) are constrained to be diagonal 3(k (k 1) / 2) • The number of parameters estimated in this model is equal to – The number of parameters increases with number variables • In a bivariate MVGARCH diagonal-vec model, there are nine parameters to be estimated – The conditional covariance matrix in MVGARCH models must be positive definite • Expanding the bivariate diagonal-vec MVGARCH model yields the following system: * * 2 h11,t 11 11 0 0 1,t 1 * * h12,t 12 0 22 0 1,t 1 2,t 1 * 2 h * 0 0 33 2,t 1 22,t 22 11* 0 0 0 * 22 0 0 h11,t 1 0 h12,t 1 33* h22,t 1 • CCC-MVGARCH models • The parameters of the diagonal-vec model increases considerably as the MVGRACH dimension increases • The CCC-MVGARCH model assumes that the conditional correlations between the elements of t are time variant • The conditional covariance matrix is written as: Ht diag h11,t , , hNN ,t R diag h11,t , , hNN ,t • And the time-invariant correlation matrix is written as: 1 R 1N 1N 1 • Where ij is the correlation between the variables • The conditional covariance matrix can be written in compact form as: H t Dt1/ 2 RDt1/ 2 • For the two-variable CCC-MVGARCH model: h11,t Ht 0 0 1 h22,t 12 12 h11,t 0 0 h22,t • The individual variances in the system are assumed to follow a GARCH(1,1) process: hii ,t ii ii i2,t 1 ii hii ,t 1 • The bivariate BEKK-MVGARCH model – A very general class of time-varying correlation MVGARCH model – The covariance matrix is written as: H t CC A1 t 1 t1 A1 B1H t 1B1 – Where C, A and B are kxk matrices and C is upper triangular; C C W 0 is symmetric positive definite • The coefficient matrices are written as quadratic forms to ensure positive definiteness • Each variance and covariance term is affected by the covariance between the variables and variance of the other variable • Matrix diagonal and vector diagonal versions of the BEKK-MVGARCH model have also been suggested • To see the generality of the BEKK-MVGARCH model consider the following two-variable BEKK model: h11,t h 12,t 2 h12,t 1,t 1 2,t 1 11 12 11 12 1,t 1 C C 2 h22,t 21 22 1,t 1 2,t 1 22 2,t 1 21 11 12 h11,t 1 h12,t 1 11 12 h h 22,t 1 21 21 22 12,t 1 22 • Linear expansions shows that each variance and covariance term is a function lagged variances and covariances • DCC-MVGARCH models • The DCC model is very similar to the CCC-MVGARCH model • The conditional covariance matrix is given as: H t Dt Rt Dt • D, is a kxk matrix of time-varying standard deviations from hit on the ith diagonal univariate GARCH models with • The model is estimated in two stages – Univarate GARCH models are estimated for all the variables and the residuals are extracted and standardised – The standardised residuals are modelled as a correlationGARCH model • The residuals standardised by their standard deviations are: it rit / hit ; it ~ N 0, Rt • The dynamic correlation structure is given as Qt 1 n n Q n t 1 t1 nQt 1 Rt Qt*1Qt Qt*1 • Where Q is the unconditional covariance of the standardised residuals • and q11 0 * Qt 0 0 0 q22 0 0 0 • The typical element of 0 0 qkk Rt is ij ,t qij ,t qii ,t q jj ,t • Asymmetric versions of the DCC have been estimated by Cappiello et al 2003 • The model can also be estimated with different n and βn coefficients for each asset in the DCC structure Other MVGARCH Models • The exponentially weighted moving average (EWMA) covariance matrix – Widely used by practitioners • Factor and orthogonal GARCH models • Flexible MVGARCH model (Ledoit, et al. (2003)) • MVGARCH models based on a multivariate conditional t-density Software and computational issues in GARCH modelling • Nonlinear estimation can be problematic due to convergence problems with the optimisation routine • Univariate GARCH models – EViews, PC-Give/OX, RATS, S-plus (FinMetrix), GAUSS (FANPAC), Matlab (GARCH Toolbox) and Microfit • Multivariate GARCH models • RATS, S-plus (FinMetrix), GAUSS (FANPAC), Matlab Summary • Econometric time series modelling – Stationary and nonstationary processes • Constant and time-dependent moments – Spurious regressions, cointegration and VARS • Modelling volatility clustering – Univariate ARCH/GARCH models – Multivariate GARCH models • Covariance matrix estimation Additional Reading • Textbooks – Enders, W. 2003. Applied Econometric Time Series, second edition. Wiley – Engle, R. 1995. ARCH: Selected Readings, Oxford University Press – Green, W.H. 2000. Econometric Analysis, fourth edition, Prentice Hall – Hamilton, J. 1994. Time Series Analysis, Princeton University Press – Hayashi, F. 2001. Econometrics, Princeton University Press – Tsay, R. 2002. Analysis of Financial Time Series, Wiley • Journal Articles – There are literally hundreds of journal articles on econometric time series modelling. The Journal of Applied Econometrics, Journal of Business and Economic Statistics, Econometrica, Journal of Time Series Analysis, Journal of Econometrics, Journal of Finance, Journal Financial Economics etc. etc. contains hundreds of papers in this area • References for the classic papers can be found in the textbooks listed above