Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Variable-frequency drive wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Stepper motor wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Induction motor wikipedia , lookup
Surface-mount technology wikipedia , lookup
Integrated circuit wikipedia , lookup
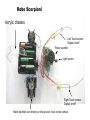
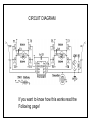
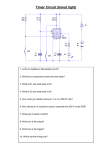
MAIN COMPONENTS Programming connector bag Motor brackets Chip Holder Microcontroller chip Piezo Sounder Circuit components switch Terminal connectors Circuit Board Battery Holder Motors Circuit components : BC639 labelled 8 transistors 1 resistor 1 LDR 3 ceramic disc capacitors 1 bead capacitor BC640labelled 47K resistor LDR( sensor) Light dependant resistor 100nF ceramic disk Capacitor Bead capacitor Small leg negative Very important: there are 2 different types of transistor BC640, and BC639 both work differently so you must get these Soldered in the correct position otherwise the circuit won’t work! Robo Scorpion! Acrylic chassis Left Touch sensor Digital/ on/off Piezo sounder Light sensor Right Touch sensor Digital/ on/off Motor spindles run directly on the ground, must not be vertical ROBO SCORPION!! The Robo Scorpion is a programmable 8-bit computer running at 4 Mhz. It is pre-programmed to head towards light while avoiding obstacles in its path. The robot has two digital touch sensors, an analogue light sensor and a small sounder which ‘chirps’ during its operation. It can also be programmed while it is in ‘edit’ mode via a serial data link to a PC using your own Instructions. TOP VIEW SCHEMATIC Very important: there are 2 different types of transistor BC640, and BC639 both work differently so you must get these Soldered in the correct position otherwise the circuit won’t work! CIRCUIT DIAGRAM If you want to know how this works read the Following page! HOW IT WORKS U1 is a complete computer running at 4MHz. Pins 2, 3, 5, 6, 7 can be used for input or output; pin 4 is only for input. U1 controls the motors by switching the transistors T1..T8 on and off. To slow the motors down and use less power, they are switched on and off around 200 times a second. If output pin 2 of U1 is low then T1 is switched off and T2 is switched on. If pin 3 is high then T4 is switched off and T3 is switched on. So motor M1 runs forward. If pin 2 is high and pin 3 is low then the motor runs backward. If pins 2 and 3 are both low or both high then the motor stops. Likewise, U1 pins 6 and 7 control M2. If the right antenna touches something, it is connected to 0V and this is sensed by pin 4. The left antenna is sensed by input pin 5. Pin 5 is normally pulled high by the LDR. When a Sound is required, pin 5 temporarily switches into output mode and toggles up and down at 2kHz to 3kHz. To measure the light, pin 5 switches into output mode. It goes low to discharge C2 then switches into input mode. The capacitor slowly charges through the LDR. In low light, the resistance of the LDR is higher so C2 takes longer to charge. So the time it takes for pin 5 to read "high" (around 2.8V) depends on the light level. (In dim light, the resistance of the LDR can be too high - R1 helps charge the capacitor.) As pin 5 toggles, a click can be heard from the Sounder. Different resistors can be used to adjust the sensitivity. The serial programming lead For extension work the robot can be programmed Via this lead. It uses the l.e.d to flash the program into the LDR of your robot while it is on and in edit mode. 1k resistor The buggy is initially in edit mode when it is turned on. Please note that the lead is for the serial port of a windows PC. A USB to Serial adapter lead will have to be used if your computer does not have a serial port ( latest computers may not have a serial port anymore!) Side view http://www.youtube.com/watch?v=qNEOI7bYl3c&featur e=related http://www.youtube.com/watch?v=n9yixR2ykB0 http://www.youtube.com/watch?v=BQYEKQUF0_c http://www.youtube.com/watch?v=paHcqN9iarg&feature=related http://www.youtube.com/watch?v=6ZnmmEQXSmI&feature=related http://www.youtube.com/watch?v=4u7aIIUDSQk&feature=user http://www.youtube.com/watch?v=gwZD59Ic9T8&feature=related http://biorobots.cwru.edu/ http://marsrovers.jpl.nasa.gov/home/index.html http://www.jpl.nasa.gov/news/phoenix/main.php http://www.1robotics.com/products.htm ROBOTIC EXPLORERS First Color View of Titan's Surface Pictures courtesy of JPL