Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Electrical substation wikipedia , lookup
Current source wikipedia , lookup
Opto-isolator wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Electrification wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Commutator (electric) wikipedia , lookup
Three-phase electric power wikipedia , lookup
Voltage regulator wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Power electronics wikipedia , lookup
Stray voltage wikipedia , lookup
Electric machine wikipedia , lookup
Alternating current wikipedia , lookup
Buck converter wikipedia , lookup
Brushless DC electric motor wikipedia , lookup
Dynamometer wikipedia , lookup
Distribution management system wikipedia , lookup
Rectiverter wikipedia , lookup
Mains electricity wikipedia , lookup
Electric motor wikipedia , lookup
Voltage optimisation wikipedia , lookup
Induction motor wikipedia , lookup
Stepper motor wikipedia , lookup
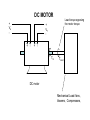
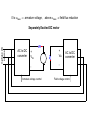
DC MOTORS SEE 3433 ELECTRICAL MACHINES DC MOTOR - Shunt motors - Separately excited - Starter DC MOTORS DC MOTOR + - + - DC motor DC MOTOR + Va - Load torque opposing the motor torque + Vf + - + Tm Tload DC motor Mechanical Load: fans, blowers, Compressors, DC MOTOR + V - + V + - + Tm Tload DC motor F = mg DC MOTOR Hoist DC MOTOR - Some applications require the control the speed - Some applications require the control the torque - In order to control the torque or speed we need to know the T- characteristics of the motor and the mechanical load Intersections between the two characteristics will determine the operating point DC MOTOR Shunt motor If Vt = IaRa + Ea It It = Ia + If Rcf + Ia Ra Vt Ea = k Te = kIa Rcw Te Tload Mechanical load k = Vt - IaRa Vt IaR a k Vt Ra Te 2 k (k) Three possible methods of speed control: Field flux Armature voltage Vt Armature resistance Ra Vt Ra Te 2 k (k) Vt kT Vt Ra Te 2 k (k) Varying Vt TL Vt ↓ Te Requires variable DC supply Vt Ra Te 2 k (k) Varying Ra Vt kT TL Ra ↑ Te Simple control Losses in external resistor Vt kT Vt Ra Te 2 k (k) Varying TL ↓ Te Not possible for PM motor Maximum torque capability reduces Method of speed control in DC motor drives Armature voltage control : retain maximum torque capability Field flux control (i.e. flux reduced) : reduce maximum torque capability For wide range of speed control 0 to base armature voltage, above base field flux reduction Armature voltage control Field flux control Te Maximum Torque capability base Te Maximum Torque capability base P Te Constant torque Constant power Pmax base 0 to base armature voltage, P = EaIa,max = kaIa,max above base field flux reduction Pmax = EaIa,max = kabaseIa,max 1/ 0 to base armature voltage, above base field flux reduction 0 to base armature voltage, If Rcf above base field flux reduction It + Ia Ra Rcw Vt BUT there are problems ! 0 to base armature voltage, If Rcf above base field flux reduction It + Ia Ra Rcw Vt Controlling Vt will also affect If Controlling If via Rcf caused losses I2R 0 to base armature voltage, above base field flux reduction Separately Excited DC motor DC supply for armature What if we have an AC supply ? DC supply for field 0 to base armature voltage, above base field flux reduction 3-phase AC source Separately Excited DC motor AC to DC converter + Vdc + Vdc - - Armature voltage control AC to DC converter Field voltage control Starter in DC Motor • At stand-still, = 0 Ea = 0 Ia Ra + Ia Vt Vt Ra eg, Vt = 100, Ra = 0.1 Ia = 1000 A ! – Starter in DC Motor • We can limit Ia at start-up by: 1) Controlling Vt using variable supply – e.g. using power electronics converter 2) Adding external resistor known as starter Ia Ra + + Ea – Vt – Ia Vt R a R st When Ea = 0 Rst • As speed builds up (so too Ea), Rst is gradually reduced Starter in DC Motor • As speed builds up (so too Ea), Rst is gradually reduced Ia Starter circuit Imax 1 2 3 4 Imin 1 2 3 4 t (s) speed t (s) Starter in DC Motor Practical Starter circuit