Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Fictitious force wikipedia , lookup
Wave packet wikipedia , lookup
Old quantum theory wikipedia , lookup
Center of mass wikipedia , lookup
Classical mechanics wikipedia , lookup
Modified Newtonian dynamics wikipedia , lookup
Moment of inertia wikipedia , lookup
Routhian mechanics wikipedia , lookup
Relativistic angular momentum wikipedia , lookup
Brownian motion wikipedia , lookup
Hooke's law wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Matter wave wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Jerk (physics) wikipedia , lookup
Hunting oscillation wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Work (physics) wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Centripetal force wikipedia , lookup
Classical central-force problem wikipedia , lookup
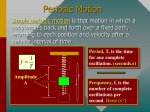
By PROF. G. C. ONYEDIM Geophysics Research Group Department of Physics Topics to Cover in Section 3 • Introduction • Simple Harmonic Motion (SHM) • Force Law in SHM • Energy in SHM • Angular SHM • The Simple Pendulum • The Physical Pendulum • SHM and Uniform Circular Motion • Damped SHM • Forced Oscillations and 1. Introduction The present topic deals with motions that repeat themselves Practical examples include: • Child on a swing • The piston in an engine • The Pendulum in a clock • The diaphragm of a loudspeaker • Atoms in molecules or in solid lattice • Boat on sea wave • Radio waves, microwaves and visible light are oscillating magnetic and electric field vectors In nature, some of such motions will gradually die out as a result of frictional forces. Therefore, to sustain such motion, there must be some impressed force. Next we shall define the basic parameters that are used to describe SHM 2. Simple Harmonic Motion (SHM) Consider a body of mass m that moves back and forth along the x-axis. It’s motion is analogous to that of a mass moving in a circle but viewed from the side. The motion can be shown to sweep out a sine wave and is therefore described as HARMONIC Repeats itself at regular intervals. Mass in Linear SHM along x-axis Parameters of SHM (a) Frequency: Number of complete oscillation per second and represented by the f or ν. Unit of frequency is cycles/sec Hertz Hz (b) Period: Time required to complete one oscillation and represented by T. Unit of T is sec. T is also related to frequency by T = 1/f (1) (c) Amplitude: The maximum displacement in the motion and represented by xm SHM as a periodic sinusoid Analogy of Oscillating Spring and Sine Wave Equations of SHM In SHM, the restoring force F is directly proportional to the displacement x and is governed by Hooke's Law. That is F = - kx (2) where k = spring constant and x is displacement Thus, Newton’s equation of motion for the system becomes: F = ma = md2x/dt2 = -kx The solution for the equation is: (ωt + φ) is called the phase ω is the angular frequency (radians per sec) φ is the phase constant which depends on how the motion started. Assume φ = 0 at time t = 0. After one period T from any time t, the mass returns to the original position. That is: X = Xm Cos(ωt) = xm Cosω(t + T) ωt + 2π = ω(t + T) = ωt + ωT Therefore ω = 2π/T = 2πf (4) • When the displacement of a particle at any time “t” can be given by this formula: x(t ) xm cos(t ) Its motion is called simple harmonic motion Simple Harmonic Motion x(t ) xm cos(t ) • The factors xm, ω and are all constants • xm is the amplitude of the oscillation • ω is angular frequency of the oscillation • The time varying quantity (ωt + ) is called the phase of the motion and is called the phase constant or phase angle Simple Harmonic Motion Let 0 then xt xm cos t SHM repeats itself after T time xt T xt •and cosine function repeats itself when its argument (the phase) has increased by the value 2π Simple Harmonic Motion (t T ) t 2 2 2f T is called angular frequency Simple Harmonic Motion Keeping ω & Φ constant varying xm … • We can see that the curves look identical except that one is ‘taller’ than the other • These two curves have a different maximum displacement – or amplitude xm Simple Harmonic Motion • Keeping Φ & xm constant • Varying ω =2π/T … • let T´ = T/2 Simple Harmonic Motion • Keeping xm & ω constant • varying phase angle •The 2nd curve has ‘slid over’ by a constant amount relative to the 1st curve… The Velocity of SHM • To get the velocity of the particle • differentiate the displacement function with respect to time x(t ) xm cos(t ) d v(t ) xm cos(t ) dt The Velocity of SHM v(t ) xm sin( t ) or vt xm xt 2 2 for all times 2 2 The Velocity of SHM • velocity is a sine function • It is T/4 period (or π/2) out of phase with the displacement The Acceleration of SHM • lets differentiate once again to get the acceleration function: d v(t ) d a(t ) xm sin( t ) dt dt a(t ) xm cos(t ) 2 The Acceleration of SHM • We can combine our original equation for the displacement function and our equation for the acceleration function to get: a(t ) xm cos(t ) 2 a(t ) x(t ) 2 The Acceleration of SHM a(t ) x(t ) 2 • This relationship of the acceleration being proportional but opposite in sign to the displacement is the hallmark of SHM • Specifically, the constant of proportionality is the square of the angular frequency • The acceleration function is onehalf period (or π radians) out of phase with the displacement and the maximum magnitude of the acceleration is ω2xm • When the displacement is at a maximum, the acceleration is also at a maximum (but opposite in sign) • And when the displacement and acceleration are at a maximum, the velocity is zero • Similarly, when the displacement is zero, the velocity is at a maximum SHM – CIRCULAR MOTION ANALOGY Velocity in SHM Start with displacement given by X = Xm Cos(ωt + φ) We differentiate to obtain Velocity as follows: V = dx/dt = - Xm ωSin(ωt + φ) i.e. V = - ωXm Sin(ωt + φ) (5) Acceleration The acceleration a is calculated by taking the derivative of velocity v or the second derivative of displacement x as follows: a = dv/dt = d/dt[- Xm ωSin(ωt + φ)] i.e. i.e. a = - ω2 Xm Cos(ωt + φ) a = - ω2 X(t) (6) (7) Thus, (i) Acceleration is proportional to X(t) and (ii) ,, is opposite displacement X(t) 3. FORCE IN SHM Using the equation for acceleration shown above, Newton’s 2nd Law becomes F = ma = -m[ω2 X(t)] = -mω2 [X(t)] (8) Let mass m be attached to spring of spring constant k and made to perform SHM between points +X and –X along the x-axis. Hooke’s Law is F = - kx (9) Compare Eqns.8 and 9 results in k = mω2 (10) ω = (k/m) ½ = Angular Frequency (11) Ponderable: Car springs When a family of four people with a total mass of 200 kg step into their 1200-kg car, the car springs compress 3.0 cm 1) What is the spring constant for the car springs, assuming that they act as a single spring? 2) How far will the car lower if loaded with 300 kg? 3) What are the period and frequency of the car after hitting a bump? Assume the shock absorbers are poor, so the car really oscillates up and down. Thus, the Period T for the oscillation becomes T = 2π/ω = 2π (m/k)½ (12) Large k = Stiff Spring Short Period OR Low Frequency Large mass (m) Long Period/High Frequency Spring provides ‘Springiness’ Mass provides ‘Inertia’ 4. ENERGY IN SHM As body eg mass attached to spring oscillates in SHM, energy is transformed from P.E. of spring to K.E. of mass in such a way that Total Energy at any time (t) is CONSTANT. P.E. due to spring is U(t) = ½ k[X(t)]2 = ½k Xm2 Cos2(ωt + φ) (13) Kinetic Energy of oscillating mass m is K(t) = ½mv2 = ½m(-ωXm)2 Sin2(ωt + φ) (14) Using Eqn. 11 i.e. ω = (k/m) ½ Then : K(t) = ½ k Xm2 Sin2(ωt + φ) (15) The Total Energy E(t) of the oscillator becomes: E(t) = U(t)+K(t) = ½kXm2 Cos2(ωt+φ) + ½ kXm2 Sin2(ωt+φ) = ½kXm2 [Cos2(ωt+φ) + Sin2(ωt+φ)] = ½kXm2 (16) (16) Shows that the Total Energy is CONSTANT and independent of time since it is a function of the Maximum Displacement Xm Plot of SHM Energy as a Function of Time Plot of Energy as a Function of Displacement The oscillator needs the two complementary elements: • Spring to store Potential Energy and • Mass to store Kinetic Energy 5. ANGULAR SHM Another form of SHM is Angular SHM such as that triggered by twisting and releasing wire that suspends a circular disk as shown in the diagram. The device is referred to as a Tortional Pendulum Twisting causes a Restoring Torque τ on wire which is proportional to the twist angle θ i.e. τ = -κθ (17) where κ (kappa) is a constant that depends on parameters of the spring (Length, radius and type of material) Compare (17) with Hooke’s Law F= -kx which caused SHM of period T = 2π (m/k)½ Therefore, Period for Angular SHM becomes T = 2π (I/κ)½ (18) Here, I is known as the moment of Inertia which depends on the mass (m) of the oscillating element and a characteristic distance (r) of the mass distribution from a reference point. 6. SHM of a Simple Pendulum Diagram shows mass m suspended on string of length L. If system is displaced by angle θ, it performs SHM about the central equilibrium axis. Inertia comes from mass m Springiness comes from Force of gravity Restoring Force is F = -mgSinθ For small θ, Sinθ θ (19) Thus, F = -mgθ = -mg(x/L) = -(mg/L)x = kx (20) i.e. k = mg/L (21) Thus, Period T = 2π (m/k)½ = 2π (L/g)½ (22) 7. SHM of Physical Pendulum Here, displacement is angular due torestoring Torque as shown in diagram Torque = τ = Fh = -mgSinθh = -mgθh (24) τ = -(mgh)θ (25) Therefore k = mgh (26) Resulting in the equation for the period of the Physical Pendulum as T = 2π (I/k)½ = 2π (I/mgh)½ (27) I = Rotational Moment of Inertia (MI) h = Distance between CG and point of support 7. SHM of Physical Pendulum Here, displacement is angular due to restoring Torque as shown in diagram Torque = τ = Fh = -mgSinθh (23) τ = -mgθh (24) τ = -(mgh)θ (25) Therefore k = mgh (26) Resulting in the equation for the period of the Physical Pendulum as T = 2π (I/k)½ = 2π (I/mgh)½ (27) I = Rotational Moment of Inertia (MI) h = Distance between CG and point of support The Simple Pendulum An application of Simple Harmonic Motion A mass m at the end of a massless rod of length L L There is a restoring force which acts to restore the mass to =0 m F mg sin T • Compare to the spring F=-kx • The pendulum does not display SHM mgsin mg But for very small (rad), we can make the approximation (<0.5 rad or about 25°) simple pendulum approximation sin F mg This is SHM since s r L Arc length s mg Looks like spring force F mg s L L mg Like the spring ( Fs kx) k constant L Now, consider the angular frequency of the spring k mg / L g m m L 1 g Simple f pendulum 2 L Simple pendulum angular frequency frequency • With this , the same equations expressing the displacement x, v, and a for the spring can be used for the simple pendulum, as long as is small • For large, the SHM equations (in terms of sin and cos) are no longer valid more complicated functions are needed (which we will not consider) • A pendulum does not have to be a point-particle The Physical Pendulum A rigid body can also be a pendulum The simple pendulum has a moment of inertia Rewrite in terms of I g mg mgL 2 L mL mL mgL 1 mgL or f I 2 I I mL 2 L cg m mg L is the distance from the rotation axis to the center of gravity Damped Harmonic Motion Simple harmonic motion in which the amplitude is steadily decreased due to the action of some nonconservative force(s), i.e. friction or air resistance (F=- bv, where b is the damping coefficient) Classifications of damped harmonic motion: 1. Underdamped – oscillation, but amplitude decreases with each cycle (shocks) 2. Critically damped – no oscillation, with smallest amount of damping 3. Overdamped – no oscillation, but more damping than needed for critical • Apply Newton’s 2nd Law Fx kx bv max 2 dx d x kx b m 2 dt dt d 2x b dx k kx 0 2 dt m dt m • Another 2nd-order ordinary differential equation, but with a 1st-order term b 2m t x A0e cos(t 0 ) • The solution is • Where 02 (b /2m)2 0 k /m • Type of damping determined by comparing 0 and b/2m Envelope of damped motion A=A0e-bt/2m SHM underdamped t ( rad) Overdamped Critically damped Underdamped SHM Forced Harmonic Motion Unlike damped harmonic motion, the amplitude may increase with time Consider a swing (or a pendulum) and apply a force that increases with time; the amplitude will increase with time Forced HM SHM t ( rad) Consider the spring-mass system, it has a frequency 1 f 2 k / m f 0 We call this the natural frequency f0 of the system. All systems (car, bridge, pendulum, etc.) have an f0 We can apply a time-dependent external driving force with frequency fd (fd f0) to the spring-mass system F (t ) Fext cos(2 f d t ) This is forced harmonic motion, the amplitude increases But if fd=f0, the amplitude can increase dramatically – this is a condition called resonance Reference • Halliday; Resnick; Walker. Fundamental of Physics 8th edition extended