Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Hooke's law wikipedia , lookup
Frame of reference wikipedia , lookup
Laplace–Runge–Lenz vector wikipedia , lookup
Jerk (physics) wikipedia , lookup
Four-vector wikipedia , lookup
Derivations of the Lorentz transformations wikipedia , lookup
Coriolis force wikipedia , lookup
Mechanics of planar particle motion wikipedia , lookup
Hunting oscillation wikipedia , lookup
Inertial frame of reference wikipedia , lookup
Mass versus weight wikipedia , lookup
Classical mechanics wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Velocity-addition formula wikipedia , lookup
Fictitious force wikipedia , lookup
Equations of motion wikipedia , lookup
Seismometer wikipedia , lookup
Centrifugal force wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Classical central-force problem wikipedia , lookup
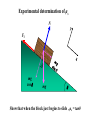
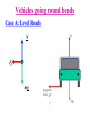
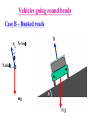
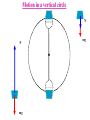
Dynamics Dynamics Velocity & Acceleration Inertial Frames Forces – Newton’s Laws Part I - “I frame no hypotheses; for whatever is not deduced from the phenomena is to be called a hypothesis; and hypotheses, whether metaphysical or physical, whether of occult qualities or mechanical, have no place in experimental philosophy.” READ the Textbook! http://www.hep.manchester.ac.uk/u/parkes/Chris_Parkes/Teaching.html October 2013 Chris Parkes vector addition • c=a+b y cx= ax +bx cy= ay +by b can use unit vectors i,j a c i vector length 1 in x direction x j vector length 1 in y direction scalar product finding the angle between two vectors a b ab cos a x bx a y by a,b, lengths of a,b Result is a scalar a xbx a y by a b cos 2 2 2 2 ab a x a y bx by a b Vector product e.g. Find a vector perpendicular to two vectors c ab c a b sin iˆ c a b ax bx ˆj ay by kˆ a y bz a z by a z a z bx a x bz bz a x by a y bx c Right-handed Co-ordinate system b a Unit Vectors in Polar system y ˆ r̂ r ĵ θ iˆ x Directions of rˆ and ˆ vary with position y ĵ ˆ r̂ ˆ cos θ r̂ cos ˆ sin ĵ rˆ cos iˆ sin ˆj r̂ sin iˆ ˆ sin iˆ cos ˆj r iˆ x The component of The component of r̂ r̂ in the x direction = in the y direction = The component of ˆ in the x direction = The component of ˆ in the y direction = r̂ cos cos r̂ sin sin ˆ sin sin ˆ cos cos Velocity and acceleration vectors • Position changes with time • Rate of change of r is velocity Y (x,y) or (r,θ) – How much is the change in a very small amount of time t v d r r (t t ) r (t ) Limit at t0 dt t v = rr̂ + rqqˆ dv v(t + dt) - v(t) d 2 r a= = = 2 dt dt dt a = (r - rq 2 )r̂ + (2rq + rq )qˆ r(t) 0 x r(t+t) X v rrˆ rˆ Geometric interpretation of this equation Radial component Tangential component Relative Velocity 1D e.g. Alice walks forwards along a boat at 1m/s and the boat moves at 2m/s. What is Alice’s velocity as seen by Bob ? If Bob is on the boat it is just 1 m/s If Bob is on the shore it is 1+2=3m/s If Bob is on a boat passing in the opposite direction….. and the earth is moving around the sun… Velocity relative to an observer Relative Velocity 2D e.g. Alice walks across the boat at 1m/s. V boat 2m/s As seen on the shore: θ V 2 2 V 1 2 5m / s relative to shore tan 1 / 2, 27 V Alice 1m/s Changing co-ordinate system y Define the frame of reference – the co-ordinate system – in which you are measuring the relative motion. No ‘correct’ or ‘preferred’ frame (x’,y’) Frame S’ (boat) v boat w.r.t shore Frame S (shore) vt x’ x Equations for (stationary) Alice’s position on boat w.r.t shore i.e. the co-ordinate transformation from frame S to S’ x= Assuming S and S’ coincide at t=0 : Known as Gallilean transformations These simple relations do not hold in special relativity x '+ vt y = y' , t = t ' dx dx ' = dt dt + v We described the motion, position, velocity, acceleration, now look at the underlying causes Newton’s laws • First Law – A body continues in a state of rest or uniform motion unless there are forces acting on it. • No external force means no change in velocity • Second Law – A net force F acting on a body of mass m [kg] produces an acceleration a = F /m [ms-2] • Relates motion to its cause F = ma units of F: kg.m.s-2, called Newtons [N] • Third Law – The force exerted by A on B is equal and opposite to the force exerted by B on A Fb •Force exerted by block on table is Fa Block on table Fa=-Fb Weight (a Force) Fa •Force exerted by table on block is Fb (Both equal to weight) Examples of Forces weight of body from gravity (mg), - remember m is the mass, mg is the force (weight) tension, compression friction, fluid resistance Force Components •Force is a Vector •Resultant from vector sum R F1 F2 F1 R F2 •Resolve into perpendicular components Fx F cos Fy F Fy F sin F x Fxiˆ F y Fy ˆj Fx Free Body Diagram • Apply Newton’s laws to particular body • Only forces acting on the body matter – Net Force F • Separate problem into each body e.g. Body 1 Supporting Force from plane (normal force) Friction Tension In rope Block weight Body 2 Tension in rope Block Weight Tension & Compression • Tension – Pulling force - flexible or rigid • String, rope, chain and bars mg • Compression – Pushing force • Bars mg mg • Tension & compression act in BOTH directions. – Imagine string cut – Two equal & opposite forces – the tension Friction • A contact force resisting sliding – Origin is electrical forces between atoms in the two surfaces. • Static Friction (fs) – Must be overcome before an objects starts to move • Kinetic Friction (fk) – The resisting force once sliding has started • does not depend on speed N fs or fk F mg fs s N fk k N Friction – origin, values • Friction proportional to N is an approximate rule • Microscopic level – Intermolecular forces where surfaces come into contact – Once sliding starts usually easier to keep in motion • Less bonding, kinetic < static friction Material Steel on steel Glass on Glass Teflon on Teflon Rubber on concrete (dry) Rubber on concrete (wet) Static Coefficient 0.74 0.94 0.04 1.0 0.30 Kinetic Coefficient 0.57 0.40 0.04 0.8 0.25 Experimental determination of μs N Ff mg cos mg Show that when the block just begins to slide , μs = tanθ The Rotor Fairground Ride What does the speed of the Rotor need to be before the floor is removed? Vehicles going round bends Case A: Level Roads Ff Vehicles going round bends Case A: Level Roads N Ff mg F f Vehicles going round bends Case B – Banked roads N N cos N sin mg Motion in a vertical circle N N mg mg Looping the Loop In a 1901 circus performance, Allo ‘Dare Devil’ Diavolo introduced the stunt of riding a bicycle in a loop the loop. Assuming that the loop is a circle of radius R = 2.7m, what is the minimum speed Diavolo could have at the top of the loop in order to complete the stunt successfully? Revision / Summary: Newton III • Newton III Pairs act on different bodies – A on B, B on A – e.g. Earth pulls book down, book pulls Earth up FTB FBT FEB FBE N.III Pairs: FTB = -FBT FEB = -FBE (aE=FBE/mE, tiny) Revision / Summary: Newton II Problems 1. 2. 3. 4. 5. 6. 7. Draw a simple sketch of the system to be analysed. Identify the individual objects to which Newton’s 2nd Law can be applied. For each object draw a free-body diagram showing all the forces acting on the object. Introduce a co-ordinate system for each object. For each object, determine the components of the forces along each of the object’s co-ordinate axes. For each object, write a separate equation for each component of Newton’s 2nd Law ( equation of motion). Solve the equations of motion. Tension (normal In rope Free Body force) Diagram Friction Block weight backup A passenger on a Ferris wheel moves in a vertical circle of radius R with constant speed, v. Assuming the seat remains upright during the motion, derive expressions for the force the seat exerts on the passenger at the top of the circle and at the bottom. A small bead can slide without friction on a circular hoop that is in a vertical plane and has a radius of 0.1 m. The hoop rotates at a constant rate of 4 revs/s about a vertical diameter. (a) Find the angle β at which the bead is in vertical equilibrium. (b) Is it possible for the bead to ‘ride’ at the same elevation as the centre of the hoop? (c) What will happen if the hoop rotates at 1 rev/s ?