Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Wireless power transfer wikipedia , lookup
Electric motor wikipedia , lookup
Mathematics of radio engineering wikipedia , lookup
Opto-isolator wikipedia , lookup
Electromagnetic compatibility wikipedia , lookup
History of electromagnetic theory wikipedia , lookup
Stepper motor wikipedia , lookup
Brushed DC electric motor wikipedia , lookup
Alternating current wikipedia , lookup
Induction motor wikipedia , lookup
Electric machine wikipedia , lookup
Magnetic core wikipedia , lookup
ELECTROMAGNETISM
APPLICATION OF MAGNETISM ON TODAYS MODES OF TRANSPORTATION
EE 4347 APPLIED EMF
INSTRUCTOR: DR. RAYMOND C. RUMPF
By: Uriel Gonzalez
Jose A. Eguade
MAGNETIC REPULSION
POSSIBLE SOLUTION TO TRANSPORTATION PROBLEMS
•
Our topic for discussion we decided was inspired behind the bullet trains in Asia, and the
Hendo Hover-board the proposed levitating skateboard. [4] Magnetic levitation is the
process of levitating an object of using magnetic fields to cause a magnetic repulsion
lifting the proposed object from the ground. This principle is being used today on modes
of transportation, like bullet trains. Magnetic suspension works via the force of attraction
between an electromagnet and some object. [1] The recent advances, notably in power
electronics and magnetic materials, have focused this attention within the last decade on
the application of electromagnetic suspension and levitation techniques to advanced
ground transportation. Regardless of the fact that there is, in effect, a separate technology
involved for each electromagnetic method, the whole subject is given a blanket title of
‘maglev’. [2] We see an option to apply this methodology to automobiles where it can be
applied as a repulsion mechanism between vehicles on the road. This method would
prevent vehicles to approaching one another at dangerous proximity preventing possible
collision incidents from taking place. We see a possibility of using the principle of
levitation that bullet trains use to cause magnetic protection fields that would surround the
vehicle on the road. From the National Highway Transportation Safety Administration on
2012 there were over 33 thousand automobile collision related casualties.[3] This would
create a repulsion field that would prevent collision by the different driving habits on
today’s US roads.
POLLUTION PROBLEMS
•
70-80% of ozone pollution is
caused by cars.
•
China is the world’s largest
producer of carbon dioxide. United
States is number 2.
•
Pollution will more likely double by
2030 [10].
TECHNOLOGY
HOVER BOARDS AND MAGLEV
•
Magnetic Levitation is a method by
which an object is suspended in air only
with the support of magnetic fields.
•
3 times more energy efficient.
HOVER BOARD
MAGNETIC REPULSION
POSSIBLE SOLUTION TO PREVENT AUTOMOBILE COLLISIONS
•
The repulsion distance can be
calculated when the magnetic
pressure equal the weight of the
object.[6]
𝑥=
•
𝐵𝑑 2
2µ0𝑚𝑎
B = Magnetic Field Strength
d = Length of Object
µ0= Free-space Permeability
m = Mass of Object
a = Acceleration
MAGNETIC REPULSION
POSSIBLE SOLUTION TO PREVENT AUTOMOBILE COLLISIONS
•
Construction:
• Creating powerful electromagnets
on bumpers of the vehicles of
same polarities[8]
• Compact and powerful in size that
would interact at predetermined
distances with accelerator of an
automobile.
CONCLUSION
REFERENCES
•
Williams, L. (2005, January 1). ELECTROMAGNETIC LEVITATION THESIS. Retrieved December 7,
2014. [1]
•
Jayawant, B. (1981, January 1). Electromagnetic suspension and levitation. Retrieved December 7,
2014. [2]
•
"Motor-Vehicle Safety: A 20th Century Public Health Achievement." Morbidity and Mortality Weekly
Report 48.18 (1999): 369-74. Nov. 2013. Web. [3]
•
"Hendo Hoverboard." N.p., n.d. Web. 7 Dec. 2014. [4]
•
"Amazing Magnetic Levitation Device!" YouTube. YouTube, n.d. Web. 7Dec. 2014. [5]
•
"High School Physics FAQ." High School Physics FAQ. N.p., n.d. Web. 7 Dec. 2014. [6]
•
Brown, Ronald. "Demonstrating Magnetic Levitation AND Persistent Current." LEVITATING
MAGNETS AND PERSISTENT CURRENTS. N.p., Mar. 2000. Web. 7 Dec. 2014. [7]
•
Kinsey, William. "How to Make a Small Powerful Electromagnet." EHow. Demand Media, 02 Aug.
2010. Web. 7Dec. 2014. [8]
•
Deziel, Chris. "How to Increase the Strength of an Electromagnet." EHow. Demand Media, 29 July 2008. Web. 7
Dec. 2014. [9]
•
Sovacool, Benjamin. “A transition to plug-in hybrid electric vehicles”. BMJ. March 2010. [10]
TRAFFIC SAFETY FACTS
Research Note
DOT HS 811 856
November 2013
2012 Motor Vehicle Crashes: Overview
Motor vehicle crashes and fatalities increased in 2012 after six
consecutive years of declining fatalities on our nation’s highways. The nation lost 33,561 people in crashes on roadways during 2012, compared to 32,479 in 2011. The increase in crashes,
and the resulting fatalities and injuries, can be seen across
many crash characteristics—vehicle type, alcohol impairment,
location of crash, etc.—and does not seem to be associated
with any one particular issue. In fact, crashes associated with
some traditional risk factors, fell in 2012. For example, young
drivers involved in fatal crashes continued to decline, as they
have since 2005. Despite the general downward trend in overall
fatalities in recent years, pedestrian and motorcycle fatalities
have shown an upward trend. This was again the case in 2012,
as motorcycle and pedestrian fatalities increased by 7 and 6
percent, respectively.
■■ The nation saw 1,082 more fatalities from motor vehicle
crashes in 2012 than in 2011—a 3.3-percent increase.
■■ Much of the increase in fatalities, 72 percent (778/1,082),
occurred in the first quarter (Jan-Mar) of 2012. And of that
first quarter increase, over half of the increase was from nonoccupant and motorcyclist fatalities. This quarter was also
the warmest first quarter in history.
■■ The number of injured people, which has seen subtle fluc-
tuation in recent years, experienced the first statistically significant increase since 1995. In 2012, there was an increase
of 145,000 people injured in motor vehicle crashes over 2011.
■■ While motor vehicle crash fatalities increased by 3.3 percent
overall, the number of people who died in alcohol-impaireddriving crashes increased by 4.6 percent. In 2012, 10,322
people lost their lives in alcohol-impaired-driving crashes.
Overall Statistics
In 2012, 33,561 people died in motor vehicle traffic crashes
in the United States—the first increase in fatalities since
2005, when there were 43,510 fatalities (see Figure 1). This
was a 3.3-percent increase in the number of people killed,
from 32,479 in 2011, according to NHTSA’s Fatality Analysis
Reporting System (FARS). In 2012, an estimated 2.36 million
people were injured in motor vehicle traffic crashes, compared to 2.22 million in 2011 according to NHTSA’s National
Automotive Sampling System (NASS) General Estimates
System (GES), an increase of 6.5 percent. While there have
been several statistically significant decreases in the estimated number of people injured annually, this is the first
statistically significant increase since 1995 (Figure 2).
Figure 1
Fatalities and Fatality Rate per 100 Million Vehicle Miles Traveled by Year
60,000
5.18
6.00
40,000
30,000
5.00
33,561
41,723
4.00
3.00
20,000
2.00
10,000
1.14
1.00
0.00
19
63
19
65
19
67
19
69
19
71
19
73
19
75
19
77
19
79
19
81
19
83
19
85
19
87
19
89
19
91
19
93
19
95
19
97
19
99
20
01
20
03
20
05
20
07
20
09
20
11
0
Fatality Rate
Fatalities
50,000
Fatalities
Fatality Rate per 100M VMT
Source: 1963–1974: National Center for Health Statistics, HEW, and State Accident Summaries (Adjusted to 30-Day Traffic Deaths by NHTSA);
FARS 1975–2011 (Final), 2012 Annual Report File (ARF); Vehicle Miles Traveled (VMT): Federal Highway Administration.
NHTSA’s National Center for Statistics and Analysis
1200 New Jersey Avenue SE., Washington, DC 20590
2
Figure 2
People Injured and Injury Rate per 100 Million Vehicle Miles Traveled by Year
169
4,000,000
3,000,000
2,362,000
3,416,000
2,500,000
2,000,000
1,500,000
80
1,000,000
500,000
12
11
20
10
20
09
20
08
20
07
20
06
20
05
20
04
20
03
20
02
20
01
20
00
20
99
People Injured
20
98
19
97
19
96
19
95
19
94
19
93
19
92
19
91
19
90
19
89
19
19
19
88
0
180
160
140
120
100
80
60
40
20
0
Injury Rate
People Injured
3,500,000
Injury Rate per 100M VMT
Source: NASS GES 1988–2012; Vehicle Miles Traveled (VMT): Federal Highway Administration.
Fatality and Injury Rates
Occupants and Nonoccupants
The fatality rate per 100 million vehicle miles traveled (VMT)
increased 3.6 percent to 1.14 in 2012 (Table 1). The overall
injury rate increased by 6.7 percent from 2011 to 2012. The 2012
rates are based on VMT estimates from the Federal Highway
Administration’s (FHWA) August 2013 Traffic Volume Trends
(TVT). Overall 2012 VMT increased by 0.3 percent from 2011
VMT—from 2,946 billion to 2,954 billion. VMT data will be
updated when FHWA releases the 2012 Annual Highway
Statistics.
Motor vehicle crash fatalities and injuries increased in 2012, as
shown in Table 2 below. Total fatalities increased by 3.3 percent
and increased among all person type categories. The estimated
number of people injured increased by 6.5 percent, a statistically significant change from 2011.
Table 1
Fatality and Injury Rates per 100 Million VMT
Fatality Rate
Injury Rate
2011
2012
Change
% Change
1.10
1.14
0.04
3.6%
75
80
5
6.7%
Source: FARS, GES, and FHWA VMT (August 2013 TVT)
There were 351 more passenger vehicle occupant fatalities (+1.6%) in 2012 than in 2011, the first increase since 2002.
Fatalities in passenger cars increased 2.1 percent and in light
trucks 1.0 percent. Large-truck occupant fatalities increased for
a third year after a large drop in fatalities from 2008 to 2009. In
2012, there was an 8.9-percent increase in large-truck occupant
fatalities and an 8.7-percent increase in large-truck occupants
injured from 2011. Motorcyclist fatalities increased in 2012 to
4,957, accounting for 15 percent of total fatalities for the year.
Injured motorcyclists increased by an estimated 12,000 in 2012,
a statistically significant difference. Among nonoccupants,
pedestrian fatalities increased by 6.4 percent while pedalcyclist
fatalities increased by 6.5 percent from 2011 to 2012.
Table 2
Occupants and Nonoccupants Killed and Injured in Traffic Crashes
Killed
Description
Total*
Occupants
Passenger Vehicles
Passenger Cars
Light Trucks
Large Trucks
Motorcycles
Nonoccupants
Pedestrians
Pedalcyclists
Other/Unknown
2011
32,479
2012
33,561
Change
1,082
21,316
12,014
9,302
640
4,630
21,667
12,271
9,396
697
4,957
351
257
94
57
327
4,457
682
200
4,743
726
223
286
44
23
2011
2,217,000
Injured
2012
Change
2,362,000
145,000
1.6%
2.1%
1.0%
8.9%
7.1%
1,968,000
1,240,000
728,000
23,000
81,000
2,091,000
1,328,000
762,000
25,000
93,000
123,000
88,000
34,000
2,000
12,000
6.3%
7.1%
4.7%
8.7%
15%
6.4%
6.5%
—
69,000
48,000
9,000
76,000
49,000
10,000
7,000
1,000
1,000
10%
2.1%
—
% Change
3.3%
% Change
6.5%
Source: Fatalities—FARS 2011 (Final), 2012 (ARF), Injured—NASS GES 2011, 2012 Annual Files
*Total includes occupants of buses and other/unknown occupants not shown in table.
Changes in injury estimates shown in bold are statistically significant.
NHTSA’s National Center for Statistics and Analysis
1200 New Jersey Avenue SE., Washington, DC 20590
3
Change in Composition of Fatalities
The composition of the fatalities in 2003 and 2012 is shown in
Figure 3. There were major changes in proportions of fatalities
among passenger vehicles (75% down to 65%), motorcyclists
(up from 9% to 15%) and nonoccupants (up from 13% to 17%).
Much of this shift is because of the large decrease in the number of passenger vehicle occupant fatalities (down by more than
10,000 over the 10-year period). However, there has also been a
large increase (1,243 more) in the number of motorcyclist fatalities during the same time period.
Figure 3
Composition of Fatalities, 2003 and 2012
2003
2012
13%
17%
9%
3%
4%
Notice that quarterly fluctuations in each category follow
similar patterns in both 2011 and 2012. For example, in each
year, the numbers of pedalcyclist fatalities increases from the
first quarter through the third quarter, then decreases in the
fourth quarter. These patterns of increasing and decreasing
fatalities from one quarter to another are the same for both
2011 and 2012.
Looking to the bottom half of Table 3, notice that except for
large truck occupants, fatalities in each type had the greatest percent increase from 2011 to 2012 in the first quarter, a
much smaller percent change in the second quarter, nearly no
change in the third quarter, and a small increase or, in some
cases, a decrease in the fourth quarter. Large-truck occupant
fatalities show a different pattern, but given that the number
of fatalities is relatively small in comparison, this variability is
not unexpected.
15%
75%
these—72 percent— occurred during the first three months.
Furthermore, even though these are winter months, the largest percentage increases occurred for motorcyclists and nonoccupants. According to the National Oceanic and Atmospheric
Administration’s (NOAA) National Climate Data Center,
2012 was the warmest first quarter on record, going back to
1897 (www.ncdc.noaa.gov/cag). This may explain some of the
increase in fatalities in 2012, especially the number and pattern
of those during January through March.
65%
Passenger Vehicle Occupants
Large Trucks, Buses and Other Vehicle Occupants
Motorcyclists
Pedestrians, Bicyclists and Other Nonoccupants
Alcohol-Impaired-Driving Fatalities
Quarterly Data
In order to gain insight into the increases in fatalities, quarterly
data for 2011 and 2012 is shown in the top half of Table 3. In
2012 there were 1,082 more fatalities than in 2011, and 778 of
Alcohol-impaired-driving fatalities increased by 4.6 percent
in 2012 (Table 4), accounting for 31 percent of overall fatalities.
An alcohol-impaired-driving fatality is defined as a fatality in
a crash involving a driver or motorcycle rider (operator) with
Table 3
Quarterly Fatalities by Occupant and Nonoccupant Type
2011
2012
Number
Percent
Quarter
Passenger
Vehicle Occupants
Motorcyclists
Jan–Mar
Apr–Jun
Jul–Sep
Oct–Dec
Jan–Mar
Apr–Jun
Jul–Sep
Oct–Dec
4,756
5,275
5,518
5,767
5,098
5,405
5,595
5,569
582
1,506
1,759
783
748
1,649
1,759
801
Jan–Mar
Apr–Jun
Jul–Sep
Oct–Dec
Jan–Mar
Apr–Jun
Jul–Sep
Oct–Dec
342
130
77
-198
7.2%
2.5%
1.4%
-3.4%
Large Truck
Occupants
Pedestrians
130
159
190
161
138
175
198
186
Changes from 2011 to 2012
166
8
143
16
0
8
18
25
28.5%
6.2%
9.5%
10.1%
0.0%
4.2%
2.3%
15.5%
1,014
891
1,053
1,499
1,217
958
1,119
1,449
203
67
66
-50
20.0%
7.5%
6.3%
-3.3%
Pedalcyclists
114
179
225
164
150
189
223
164
36
10
-2
0
31.6%
5.6%
-0.9%
0.0%
Total
6,726
8,227
8,984
8,542
7,504
8,583
9,127
8,347
778
356
143
-195
11.6%
4.3%
1.6%
-2.3%
Source: FARS 2011 (Final), 2012 (ARF)
NHTSA’s National Center for Statistics and Analysis
1200 New Jersey Avenue SE., Washington, DC 20590
4
a BAC of .08 g/dL or greater. The number of alcohol-impaired
drivers in fatal crashes increased for most vehicle types, with
the largest increase among drivers of large trucks (86%). Note
that the number of large-truck drivers is small relative to the
other vehicle types, making it subject to greater variability.
Table 4
Total and Alcohol-Impaired (AI) Driving Fatalities*
2011
2012
Change
% Change
Total Fatalities
32,479
33,561
1,082
3.3%
AI Driving Fatalities
9,865
10,322
457
4.6%
Alcohol-Impaired Drivers in Fatal Crashes by Vehicle Type
Passenger Car
4,103
4,104
1
0.0%
Light Truck - Van
256
267
11
4.3%
Light Truck - Utility
1,410
1,483
73
5.2%
Light Truck - Pickup
1,877
1,946
69
3.7%
Motorcycles
1,397
1,390
-7
-0.5%
Large Trucks
43
80
37
86%
Source: FARS 2011 (Final), 2012 (ARF)
*See definition in text.
The number of motor vehicle crashes, by crash type and severity, is presented in Table 5. The total number of police-reported
traffic crashes increased by 3.1 percent from 2011 to 2012. The
estimated increase in injury crashes is statistically significant;
this is the first time this has happened since 1995. Because
FARS data is a census of fatal crashes, no significance testing
is required.
Table 5
Number of Crashes, by Crash Type
2011
29,867
2012
30,800
Change % Change
933
3.1%
Non-Fatal Crashes
5,308,000 5,584,000
276,000
5.2%
Injury Crashes
1,530,000 1,634,000
104,000
6.8%
Property-Damage-Only 3,778,000 3,950,000
172,000
4.6%
277,000
5.2%
Total Crashes
Passenger Vehicle Occupant Fatalities, by Restraint Use
and Time of Day
2011
Type
Fatalities
Restraint Used
Restraint Not Used
Day
Restraint Used
Restraint Not Used
Night
Restraint Used
Restraint Not Used
#
21,316
10,255
11,061
10,999
6,280
4,719
10,183
3,910
6,273
2012
%
48%
52%
52%
57%
43%
48%
38%
62%
#
21,667
10,478
11,189
11,007
6,241
4,766
10,480
4,139
6,341
%
48%
52%
51%
57%
43%
48%
39%
61%
%
Change Change
351
1.6%
223
2.2%
128
1.2%
8
0.1%
-39 -0.6%
47
1.0%
297
2.9%
229
5.9%
68
1.1%
Source: FARS 2011 (Final), 2012 (ARF);
Day: 6 a.m. to 5:59 p.m.; Night: 6 p.m. to 5:59 a.m.; Total fatalities include those at
unknown time of day; unknown restraint use has been distributed proportionally
across known use.
Fatal Crashes Involving Large Trucks
Crash Type
Crash Type
Fatal Crashes
Table 6
5,338,000 5,615,000
Source: FARS 2011 (Final), 2012 (ARF)
Bold figures are statistically significant.
Restraint Use and Time of Day
Among fatally injured passenger vehicle occupants, more than
half (52%) of those killed in 2012 were unrestrained (Table 6).
Although there were 351 more passenger vehicle occupant
fatalities in 2012, we know the time of day of the crash for
only 305 of them—an increase of 8 (3% of the 305) during the
day and 297 (97%) during the night. Among the 297 increase
in nighttime fatalities, a large proportion (229, or 77%) was
among restrained passenger vehicle occupants. The number
of restrained passenger vehicle occupants killed in daytime
crashes actually decreased by 39 people. Of passenger vehicle
occupants killed at night, 61 percent were unrestrained, compared to 43 percent during the day.
NHTSA’s National Center for Statistics and Analysis
There was a 3.7-percent increase in the number of people killed
in crashes involving large trucks. Looking at only this one percentage masks the changes across fatality categories. The number of nonoccupant fatalities is the only category of fatalities
that declined from 2011 to 2012; a decline of 11 percent. All other
categories of fatalities in large-truck crashes increased (Table 7).
Large-truck occupants in single-vehicle crashes increased by
the smallest percentage (3.9%), while those in multivehicle
crashes increased by the largest (18%). Note that the number of
fatal crashes involving large trucks is relatively small, so such
variability in the number of fatalities is not unexpected.
Table 7
Persons Killed in Large-Truck Crashes
Type
Truck Occupants
Single-Vehicle
Multivehicle
Other Vehicle Occupants
Nonoccupants
Total
2011
640
408
232
2,713
428
3,781
2012
697
424
273
2,843
381
3,921
Change
57
16
41
130
-47
140
% Change
8.9%
3.9%
18%
4.8%
-11%
3.7%
Source: FARS 2011 (Final), 2012 (ARF)
Crash Location
Fatalities in rural crashes increased by 2.3 percent (Table 8)
while those in urban crashes increased by 4.9 percent. People
killed in roadway departure crashes increased by 3.4 percent
and intersection crashes increased by 5.4 percent. Following
are the definitions used for roadway departure and intersection crashes as defined by FHWA.
1200 New Jersey Avenue SE., Washington, DC 20590
5
Roadway Departure Crash: A non-intersection crash in which
a vehicle crosses an edge line, a centerline, or leaves the traveled way. Includes intersections at interchange areas.
Types of Crashes Fitting the Definition: Non-intersection fatal
crashes in which the first event for at least one of the involved
vehicles: ran-off-road (right or left); crossed the centerline or
median; went airborne; or hit a fixed object.
Intersection: Non-interchange; intersection or
intersection-related.
Table 8
People Killed in Motor Vehicle Traffic Crashes, by
Roadway Function Class, Roadway Departure and
Relation to Junction
Total
Rural
Urban
Roadway Departure*
Intersection*
2011
2012
Change
32,479
33,561
1,082
Roadway Function Class
17,769
18,170
401
14,575
15,296
721
Roadway Departure*
18,273
18,887
614
Relation to Junction
8,317
8,766
449
% Change
3.4%
2.3%
4.9%
3.4%
5.4%
Source: FARS 2011 (Final), 2012 (ARF)
Total fatalities include those with unknown Roadway Function Class.
*See definitions in text.
Other Facts
■■ The increase in passenger vehicle occupant fatalities is the
first since 2002. Even with this increase, passenger vehicle
occupant fatalities are down 34 percent from where they
were in 2002.
■■ There were 10 times as many unhelmeted motorcyclist fatal-
ities in States without universal helmet laws (1,858 unhelmeted fatalities) as in States with universal helmet laws
(178 unhelmeted fatalities) in 2012. These States were nearly
equivalent with respect to total resident populations.
■■ While
fatalities from alcohol-impaired driving have
increased from 2011 to 2012, fatalities from crashes involving
young drivers and alcohol have decreased, by 15 percent (16to 20-year-old drivers with .01+ BAC).
■■ Males have consistently comprised about 70 percent of motor
■■ Although most age groups had increased fatalities in 2012,
the 10-to-15 year group saw a decrease of 3.9 percent, and
the 16-to-20 year group decreased by 5.7 percent. There were
half a percent fewer fatalities over age 74 in 2012. All other
age groups increased.
■■ Sixty-one percent of large-truck occupants killed in 2012
died in single-vehicle crashes.
State-by-State Distribution of Fatalities and
Alcohol-Impaired Driving Crash Fatalities
Table 9 presents the total number of motor vehicle crash fatalities for 2011 and 2012, the change in the number of fatalities, and
the percentage change for each State, the District of Columbia,
and Puerto Rico. Thirteen States, Puerto Rico, and the District
of Columbia had reductions in the number of fatalities. In 2012,
the largest reduction was in Mississippi, with 48 fewer fatalities. There were 37 States with more motor vehicle fatalities in
2012 than 2011. Texas had the largest increase, with 344 additional fatalities, and Ohio had 106 more fatalities than in 2011.
Nationwide, about one-third (31%) of the total fatalities were
in alcohol-impaired-driving crashes. Eighteen States and the
District of Columbia saw declines in the number of alcoholimpaired-driving fatalities. New Jersey had the largest decrease,
with 30 fewer lives lost in alcohol-impaired-driving crashes in
2012. Thirty-two States and Puerto Rico saw increases in alcohol-impaired driving fatalities, with the largest increase of 80
fatalities in Texas.
Additional State-level data is available at NCSA’s State Traffic
Safety Information Web site, which can be accessed at:
www-nrd.nhtsa.dot.gov/departments/nrd-30/ncsa/STSI/
USA%20WEB%20REPORT.HTM.
NHTSA’s Fatality Analysis Reporting System is a census of
all crashes of motor vehicles traveling on public roadways
in which a person died within 30 days of the crash. Data
for the NASS GES comes from a nationally representative sample of police-reported motor vehicle crashes of all
types, from p
roperty-damage-only to fatal.
The information in this Research Note represents only
major findings from the 2012 FARS and GES files.
Additional information and details will be available at a
later date.
vehicle fatalities for decades.
This research note and other general information
on highway traffic safety may be accessed at:
www-nrd.nhtsa.dot.gov/CATS/index.aspx
NHTSA’s National Center for Statistics and Analysis
1200 New Jersey Avenue SE., Washington, DC 20590
6
Table 9
Total and Alcohol-Impaired Driving Fatalities, 2011 and 2012, by State
State
Alabama
Alaska
Arizona
Arkansas
California
Colorado
Connecticut
Delaware
Dist of Columbia
Florida
Georgia
Hawaii
Idaho
Illinois
Indiana
Iowa
Kansas
Kentucky
Louisiana
Maine
Maryland
Massachusetts
Michigan
Minnesota
Mississippi
Missouri
Montana
Nebraska
Nevada
New Hampshire
New Jersey
New Mexico
New York
North Carolina
North Dakota
Ohio
Oklahoma
Oregon
Pennsylvania
Rhode Island
South Carolina
South Dakota
Tennessee
Texas
Utah
Vermont
Virginia
Washington
West Virginia
Wisconsin
Wyoming
National
Puerto Rico
2011
2012
Alcohol-Impaired-Driving
Alcohol-Impaired-Driving
Fatalities
Fatalities
Total
Total
Fatalities
#
%
Fatalities
#
%
895
261
29%
865
257
30%
72
21
29%
59
15
25%
826
212
26%
825
227
28%
551
154
28%
552
143
26%
2,816
774
27%
2,857
802
28%
447
160
36%
472
133
28%
221
94
42%
236
85
36%
99
41
41%
114
34
30%
27
8
29%
15
4
27%
2,400
694
29%
2,424
697
29%
1,226
271
22%
1,192
301
25%
100
45
45%
126
51
41%
167
50
30%
184
54
29%
918
278
30%
956
321
34%
751
207
28%
779
228
29%
360
83
23%
365
92
25%
386
108
28%
405
98
24%
720
172
24%
746
168
23%
680
219
32%
722
241
33%
136
23
17%
164
49
30%
485
161
33%
505
160
32%
374
126
34%
349
123
35%
889
256
29%
938
259
28%
368
109
30%
395
114
29%
630
159
25%
582
179
31%
786
258
33%
826
280
34%
209
82
39%
205
89
44%
181
45
25%
212
74
35%
246
70
28%
258
82
32%
90
27
30%
108
32
30%
627
194
31%
589
164
28%
350
104
30%
365
97
27%
1,171
328
28%
1,168
344
29%
1,230
359
29%
1,292
402
31%
148
63
42%
170
72
42%
1,017
310
30%
1,123
385
34%
696
222
32%
708
205
29%
331
96
29%
336
86
26%
1,286
398
31%
1,310
408
31%
66
26
39%
64
24
38%
828
309
37%
863
358
41%
111
33
29%
133
45
33%
937
259
28%
1,014
295
29%
3,054
1,216
40%
3,398
1,296
38%
243
54
22%
217
34
16%
55
18
33%
77
23
30%
764
228
30%
777
211
27%
454
157
35%
444
145
33%
338
93
28%
339
95
28%
582
197
34%
615
200
33%
135
38
28%
123
40
32%
32,479
9,865
30%
33,561
10,322
31%
361
103
28%
347
104
30%
2011 to 2012 Change
Alcohol-Impaired-Driving
Total Fatalities
Fatalities
Change
% Change
Change
% Change
-30
-3.4%
-4
-1.5%
-13
-18%
-6
-29%
-1
-0.1%
15
7.1%
1
0.2%
-11
-7.1%
41
1.5%
28
3.6%
25
5.6%
-27
-17%
15
6.8%
-9
-9.6%
15
15%
-7
-17%
-12
-44%
-4
-5%
24
1.0%
3
0.4%
-34
-2.8%
30
11%
26
26%
6
13%
17
10%
4
8.0%
38
4.1%
43
15%
28
3.7%
21
10%
5
1.4%
9
11%
19
4.9%
-10
-9.3%
26
3.6%
-4
-2.3%
42
6.2%
22
10%
28
21%
26
113%
20
4.1%
-1
-0.6%
-25
-6.7%
-3
-2.4%
49
5.5%
3
1.2%
27
7.3%
5
4.6%
-48
-7.6%
20
13%
40
5.1%
22
8.5%
-4
-1.9%
7
8.5%
31
17%
29
64%
12
4.9%
12
17%
18
20%
5
19%
-38
-6.1%
-30
-15%
15
4.3%
-7
-6.7%
-3
-0.3%
16
4.9%
62
5.0%
43
12%
22
15%
9
14%
106
10%
75
24%
12
1.7%
-17
-7.7%
5
1.5%
-10
-10%
24
1.9%
10
2.5%
-2
-3.0%
-2
-7.7%
35
4.2%
49
16%
22
20%
12
36%
77
8.2%
36
14%
344
11%
80
6.6%
-26
-11%
-20
-37%
22
40%
5
28%
13
1.7%
-17
-7.5%
-10
-2.2%
-12
-7.6%
1
0.3%
2
2.2%
33
5.7%
3
1.5%
-12
-8.9%
2
5.3%
1,082
3.3%
457
4.6%
-14
-3.9%
1
1.0%
Source: FARS 2011 (Final), 2012 Annual Report File (ARF)
NHTSA’s National Center for Statistics and Analysis
1200 New Jersey Avenue SE., Washington, DC 20590
10089-111213-v3
Rep. Prog. Phys., Vol. 44, 1981. Printed in Great Britain
Electromagnetic suspension and levitation
B V Jayawant
School of Engineering and Applied Sciences, University of Sussex, Brighton BNl 9QT, UK
Abstract
The phenomenon of levitation has attracted attention from philosophers and scientists
in the past. The recent advances, notably in power electronics and magnetic materials,
have focused this attention within the last decade on the application of electromagnetic
suspension and levitation techniques to advanced ground transportation. Regardless of
the fact that there is, in effect, a separate technology involved for each electromagnetic
method, the whole subject is given a blanket title of ‘maglev’. There is also a very wide
range of industrial applications to which magnetic suspension techniques could be
profitably applied, particularly in the area of high-speed bearings to reduce noise and to
eliminate friction, and yet only high-speed ground transportation has caught the imagination of the media. This review deals with the physics and engineering aspects of the four
principal contenders for advanced ground transportation systems and describes the most
up-to-date developments in Germany, Japan, USA and the UK in this field. This article
also describes some of the very recent challenging developments in the application of
electromagnetic suspension and levitation techniques to contactless bearings. A fairly
comprehensive bibliography is given to enable the more interested reader to pursue the
topic further in any one of the technologies dealt with in this review.
This review was received in April 1980.
0034-4885/81/040411+74 $06.50
26
0 1981 The Institute of Physics
412
B V Jayawant
Contents
1. Survey of electromagnetic methods
2. Principles and limitations of electromagnetic techniques of suspension and
levitation
2.1. Suspension or levitation using permanent magnets
2.2. Levitation using diamagnetic materials
2.3. Levitation using superconductors
2.4. Levitation using induced eddy currents
2.5. Levitation using forces acting on current-carrying conductors situated
in magnetic fields
2.6. Suspension using a tuned L, C, R circuit and an electrostatic force of
attraction
2.7. Suspension using a tuned L, C,R circuit and an electromagnetic force
of attraction
2.8. Suspension using controlled DC electromagnets
2.9. Combined suspension and propulsion schemes
2.10. The mixed p system of levitation
2.11. Contending systems for practical applications including advanced
ground transportation
3. Levitation using permanent magnets
3.1. Properties of permanent magnets and magnetic materials
3.2. Permanent magnets for repulsion levitation
4. Levitation using superconducting magnets
4.1, Some properties of superconductors
4.2. Principles of superconducting levitation
5 . Levitation using eddy currents induced by mains frequency excitation
5.1. Some stable and unstable AC induction levitators
5.2. Levitation of passenger carrying vehicles, or the magnetic river
5.3. The magnetic river as a vehicle system
6. Suspension using controlled DC electromagnets
6.1, Principle of suspension using controlled DC electromagnets
6.2. Analytical aspects of multimagnet systems
6.3. Transducers, magnets and power amplifiers for magnetic suspension
systems
6.4. Contactless support and frictionless bearing applications of controlled
DC electromagnetic suspension
7. Assessment of electromagnetic suspension and levitation schemes
References
Page
413
413
415
416
417
419
420
420
42 1
422
423
424
425
426
426
428
432
432
435
447
447
453
457
458
458
462
466
47 1
472
474
Electromagnetic suspension and levitation
413
1. Survey of electromagnetic methods
The phenomenon of levitation has fascinated philosophers through the ages and it has
attracted much attention from scientists in recent times as a means of eliminating friction
or physical contact. Whilst the area of frictionless bearings is at least as important, it is
the application of suspension and levitation to high-speed ground transportation which
has received most attention, especially in the popular media. Regardless of the method
employed the vehicles are described as ‘hover trains’ and any electromagnetic method is
ascribed the title ‘maglev’. To indicate the dislike the author has for this term this is the
last time that the term will be used in this review. Technically, each method of suspension
and levitation is a technology in its own right and it is, in the author’s opinion, quite
wrong to ascribe an all-enveloping title in any case.
Besides the air-cushion principle of supporting rotating shafts or vehicles as in the
Aerotrain in France or the Tracked Hovercraft in this country there are nine other
electromagnetic methods of supporting moving or rotating masses (Geary 1964,
Jayawant 1981):
(i) Repulsion between magnets of fixed strength and of ferromagnetic materials.
(ii) Levitation using forces of repulsion and diamagnetic materials.
(iii) Levitation using superconducting magnets.
(iv) Levitation by repulsion forces due to eddy currents induced in a conducting surface or a body.
(v) Levitation using force acting on a current-carrying linear conductor in a
magnetic field.
(vi) Suspension using a tuned L, C, R circuit and the electrostatic force of attraction
(between two plates).
(vii) Suspension using a tuned L, C, R circuit and the magnetic force of attraction
(between an electromagnet and a ferromagnetic body).
(viii) Suspension using controlled DC electromagnets and the force of attraction
between magnetised bodies.
(ix) Mixed p system of levitation.
Some of the possible methods of suspension or levitation in the above list are really
of only academic interest but three in particular have been pursued with great vigour
within the last decade with the application to advanced ground transportation schemes
as the principal objective. It is necessary to distinguish at the outset between those
methods which use forces of attraction and those which use forces of repulsion. The
former may be called suspension techniques and the latter levitation.
2. Principles and limitations of electromagnetic techniques of suspension and levitation
It appears that every one of the methods listed above has been the subject of some
enthusiastic investigation at one time or another. The difficulties of achieving stable
suspension or levitation are, however, highlighted by an examination of the nature of
forces when an inverse square law relates force and distance. Earnshaw’s (1842) paper
on the subject is now considered a classic by all workers in the field of electromagnetic
414
B V Jayawant
suspension. This paper shows mathematically that it is impossible for a pole placed in a
static field of force to have a position of stable equilibrium when an inverse square law
operates and this fundamental calculation is known as ‘Earnshaw’s theorem’.
It is known in applied mechanics that a body is in equilibrium when the resultant of
forces acting on it is zero. Furthermore, the state of equilibrium is stable, unstable or
neutral depending on whether the body, if slightly displaced, would tend to return to the
position of equilibrium, would tend to move further away from it or would not tend to
move at all (Temple and Bickley 1933). In order to express this in terms of field theory
we consider a particle, i.e. a body of negligible dimensions, placed at a point (XO,yo, ZO)
in a static field of force F(x,y , z). The force on the particle is thus F(x0, yo, XO). If
(XO,
yo, ZO)is to be a position of stable equilibrium two following conditions must be
satisfied :
F(x0,yo, zo>= 0
V.F(xo,yo, ZO)<O.
(2.1)
The first is a condition of equilibrium and the second, a condition of stability. Moreover,
if F is an irrotational field then
F(x,y , z)= - V$!X, Y , z>
(2.2)
where $ is a potential. In terms of $ the necessary conditions for stable equilibrium are
V$(xo, yo, zo>=o
.w(xo,yo, zo)> 0.
(2.3)
Earnshaw’s theorem is essentially an extension to electromagnetic fields of those
conditions which can be rigorously proved using potential theory (Kellogg 1953, Papas
1977). In a charge-free region R the electrostatic field E ( x , y, z)is solenoidal and irrotational, i.e.
V.E(x,y,z)=O
0 x E(x,y , z)=o.
(2.4)
From the second of these equations it follows that
Y , z>= - Vdx, Y , z )
(2.5)
where cp is the electrostatic potential. The force on a particle of charge q placed in the
field is
F(x, Y , z>= q W , Y , z>.
(2.6)
Taking the divergence of this equation and considering the first of equations (2.4)
V*F(x,y , z)=O
(2.7)
for all points in R. Thus, although equation (2.6) inay satisfy the first of the two conditions (2.1) necessary for stable equilibrium, (2.7) violates the second. Thus a charged
body placed in an electrostatic field cannot rest in stable equilibrium under the influence
of electric forces alone. The theorem is of wider applicability than electrostatic fields,
for example to the Newtonian potential of gravitational theory.
Braunbeck (1939a, b) extended the analysis to uncharged dielectric bodies in electrostatic fields and magnetic bodies in magnetostatic fields. The distinguishing feature of
these cases is that they involve dipoles whereas Earnshaw’s theorem applies to individual
particles.
When a dielectric body is placed in an electrostatic field the polarisation P is related
to the electric field E by
P=xeE
(2.8)
Electromagnetic suspension and levitation
415
where Xe is the electric susceptibility of the dielectric body. The induced dipole moment
p of the body is given by
p=JPdV
(2 * 9)
over V , the volume of the body. Assuming that the body is small enough for E to remain
constant
p = JXeEdV=XeEV.
(2.10)
The force on the body is given by
Fe=(p*V)E
(2.11)
which, with the aid of equation (2. lo), yields
Fe=xeV(E*V)E.
(2.12)
Since X e = ( e r- E O ) where is the dielectric constant of the body and EO is the dielectric
constant of free space and since (EeV) E=+VE2 equation (2.12) can be rewritten as
Fe=$(Er-
EO)
VVE2.
(2.13)
Equation (2.13) gives the force that a dielectric body of volume V and dielectric constant
E~ experiences in an electrostatic field E. Similarly a magnetic body in a magnetic field H
experiences a force
(2.14)
Fm =+(pU.r- po) V V H 2
where pr is the permeability of the body and PO is the permeability of free space.
Since the divergence of V E 2 can nowhere be negative and since it is physically
impossible for ( E - E O ) to be negative, it means that the condition given by equation (2.4)
cannot be satisfied and hence a dielectric body cannot be in stable equilibrium anywhere
in the electrostatic field.
For magnetic bodies the situation is quite different. Although the divergence of VH2
can nowhere be negative the quantity (,U?- PO) can be negative for diamagnetic and
superconducting bodies as well as effectively so for conducting bodies with induced
eddy currents. Thus condition (2.4) can now be satisfied and stable suspension is possible for diamagnetic bodies and for superconducting bodies, as well as for conducting
materials such as, say, aluminium or copper in the proximity of coil systems carrying
alternating currents.
2.1. Suspension or levitation using permanent magnets
It follows from Earnshaw’s theorem and Braunbeck’s analysis that stable suspension or
levitation is impossible with a system of permanent magnets (or fixed-current electromagnets) unless part of the system contains either diamagnetic material
1) or a
superconductor ( p r= 0) and that it is altogether impossible to achieve suspension or
levitation in electrostatic fields since there are no known materials with E y < 1.
Early work on the use of permanent magnets from about 1890 was concerned with
taking part or whole of the load of a rotor shaft magnetically. In spite of the large
number of patents none of this work appears to have been commercially successful.
Interest in this topic seems to have languished until the 1930s and the advent of improved
permanent magnet materials. The commonest application of magnets of fixed strength
put forward has been for the suspension of shafts or spindles of watt hour meters to
41 6
B V Jayawant
relieve the load on the pivot bearing, a constant target of magnetic suspension workers
(Evershed 1900, Faus 1943, de Ferranti 1947). Further possible applications in the aerospace field are discussed in a General Electric Co. (USA) report (1963).
Recent developments in permanent magnets fabricated from high coercivity ferrite
materials has once again raised the subject of using them for levitation of vehicles to
carry passengers. Polgreen (1965, 1966a, b) was the first to propose application to a
trackbound vehicle using newly developed BaF3 magnets (Polgreen 1968, 1971) in the
repulsion mode. His was a model system consisting of blocks of barium ferrite magnets
fixed to the underside of a vehicle with nylon rollers for guidance. Similar proposals,
including one for high-speed travel across the USA in evacuated tubes, 1% ere made by
others at about the same time (Westinghouse Engineer 1965, Baran 1971, Forgacs 1973).
In all these proposals it has been assumed that barium ferrite would be cheap to manufacture in large quantities required for laying down the track. One of the advantages of
using ferrites for track is that there are no induced eddy currents. Thus there is no drag
force or a loss of lift due to eddy current reaction.
McCaig (1961) and Bahmanyar and Ellison (1974) have made a study of the lifting
forces, configurations and track designs for tracks constituted of permanent magnets.
Any practical systems built around these ideas, however, would require damping in the
vertical direction and guidance as well as damping in the lateral direction. This has been
considered only by Voigt (1974) who proposed driving a current proportional to vertical
velocity in a coil around the permanent magnets. Recently a new magnetic material,
samarium cobalt, with an even greater coercivity than barium ferrite has appeared. The
intrinsic coercive force of these cobalt rare-earth materials may be 20-50 times that of
conventional permanent magnets and lifting capabilities in repulsion mode of 5-10 times
(Becker 1970). In spite of these significant advances in materials there remain many
practical difficulties in the implementation of transportation schemes using permanent
magnet tracks. However, for instrument-bearing applications there exists a real possibility of using controlled permanent magnet schemes whereby the power consumption
in the steady state can be made virtually zero.
2.2. Levitation using diamagnetic materials
Levitation can be achieved as indicated earlier in static magnetic fields by employing
diamagnetic materials but even the two materials which exhibit most pronounced diamagnetic properties, bismuth and graphite, are so weakly diamagnetic that only small pieces
of diamagnetic materials can be levitated.
The topic of levitation in the presence of diamagnetic materials has been studied by
Braunbeck (1939a, b, 1953) and Boerdijk (1956a, b). Braunbeck levitated small pieces of
bismuth 0.75 mm x 2 mm, weighing 8 mg, and graphite 2 mm x 12 mm, weighing 75 mg,
between specially formed poles of an electromagnet capable of producing a field of flux
density 2.3 T. Boerdijk repeated this experiment on a smaller scale using permanent
magnets and also performed an alternative experiment of levitating a magnetised disc of
1 mm diameter between a magnet attracting it upwards and a piece of diamagnetic material
below it. His analysis concluded that it should be possible to levitate a magnetised
particle of micrometric size a fraction of a millimetre above a piece of bismuth or graphite
without the aid of a surmounted magnet. A further examination of diamagnetic levitation
is contained in a report of the General Electric Co. (USA) but the broad conclusions to
be drawn from the results of these workers is inevitably that the phenomenon of
diamagnetic levitation is of no more than academic interest.
Electromagnetic suspension and levitation
417
2.3. Levitation using superconductors
Certain metals and alloys when cooled to a temperature approaching 0 K (- 273°C)
become superconductors. The superconducting state is indicated by the complete absence
of electrical resistance and once initiated a current will continue to flow without the
presence of a voltage source in the circuit. This is also accompanied by rejection of
magnetic flux in the superconducting body and is known as the Meissner effect (Meissner
and Ochsenfeld 1933) which causes superconductors to behave as perfectly diamagnetic
materials ( p r=0). Stable suspensions using permanent magnets are, therefore, possible.
The first recorded demonstration of this principle was the levitation of a 15 mm bar
over a superconducting lead plate by Arkadiev (1945). In the subsequent pursuit of the
development of a cryogenic magnetically levitated gyroscope superconducting spheres
were levitated over various arrangements of electromagnets (Simon 1953, Culver and
Davis 1957) . A scheme for levitating a vehicle over two parallel superconducting rails
Horizontal view
--_
-.
Lift force
1
1hor;zontal sfabilityi
+Current flow into paper
-Current fiou out of paper
’
2ft;
- 6,-f t I,f
Top view
~
1
”
~
~
-
--7
~
~
- 300mph
&m*v,’~,mdI
1 efn,
“Track
Train
1
~
c
z
-
3
loops A
+Train magnet flux into paper
-Tra!n magnet flux w t of paper
,,,_,,,,_,
Lost current flux out of paper
Lost current flux into paper
\\\~~\\~,,.
Figure 1. Conceptual view of track and train as proposed by Powell and Danby (1966).
was proposed by Powell in 1963 and later (Powell and Danby 1966) a second system
(figure 1) in which there was no need for superconducting rails, as attached to the vehicles
would be superconducting magnets, which would ride over normal conducting rails
without touching them. There were proposals (Guderjahn et all969) to support a rocket
launching sledge (figure 2) capable of speeds of 5 km s-1 and further studies of baseline
specifications for passenger carrying vehicles (Borcherts et al 1973).
The electrodynamically levitated vehicle, as it is known, is lifted and guided by
repulsion forces between superconducting magnets on the vehicle and secondary circuits
on the track, or eddy currents if the track is passive. The levitation is self-stabilising and
clearance between magnets and secondary circuits can be larger than 10 cm. However,
the stiffness and damping of the suspension are low and also the vehicle must be in motion
to generate lift. There is, therefore, a minimum velocity which must be exceeded before
the vehicle becomes levitated and the system is generally considered suited to high-speed
transport schemes travelling at speeds in excess of 300 km h-1. Many problems remain
418
B V Jayawant
Thin aluminium channel
boclted by concrete
Superconducting coil i 2 f t x 6 i t i
2x105 A turns
Figure 2. Superconducting rocket sledge.
unresolved as yet and among the principal ones is that of eddy current drag in addition
to the aerodynamic drag on such vehicles. The eddy current drag is rather large at low
speeds and this places quite a substantial burden on the propulsion systems during
acceleration. The drag reduces at high speeds but in order to get a high lift to drag ratio
(a figure of merit for these systems) a large quantity of conducting material (aluminium)
is required in the secondary circuits (track). At high speeds the low inherent damping
coefficient of the suspension or guidance further reduces and in fact can become negative,
presenting some quite serious problems of vehicle stability in general. It has been
reported that passive damping may be inadequate (Borcherts et al 1973, Thornton 1973,
Ellison and Bahmanyar 1974, Qhno et a1 1973, Coffey et a1 1969). If a linear synchronous
motor is used as propulsion unit, a proposal to vary the drive to the motor in accordance
with the vertical acceleration signals fed back (Greene 1974) or variation of coil currents
(Ooi and Banakar 1975) to produce more damping at the expense of the figure of merit
have been considered.
Research on superconductive levitation schemes is quite active in Canada, Japan and
England. The Japanese National Railways produced a 34 ton vehicle in 1972. It had a
lift of 6 cm but guidance was provided by wheels on the sides of the guideway. A second
and mare advanced vehicle (Qutsuka and Kyotani 1975, Yamamura and Ito 1975)
operating on a 20 km track (figure 3 (plate)) has been reported in 1979 as having achieved
speeds in excess of 500 km h-1.
There were two projects in the United States. One was a collaborative effort between
various universities and industrial laboratories under the direction of the Department of
Transportation. The other project, called the magnaplane project, was partly under the
direction of the National Science Foundation. Both studies were theoretical as well as
experimental but involving permanent magnets (Thornton 1973, Ooi and Banakar 1975,
Tang et a1 1975, Reitz and Borcherts 1975). Research in the United States appears to
have been halted indefinitely since about 1975.
Research in Canada on superconducting levitation systems for high-speed ground
transportation with synchronous linear motor propulsion is being carried out by an interdisciplinary team of scientists and engineers from the universities of Toronto, Queen’s
and McGill (Eastham 1975). A 7.6 m diameter wheel rotating about a vertical axis with
a maximum peripheral speed of 100 km h-1 is being med to carry out full-scale tests of
propulsion, levitation and guidance systems (§lemon 1975).
In England work has been going on for a number of years (Eastham and Rhodes
1971, Rhodes et a1 1974, Rhodes 1976) at the University of Warwick and a 600 m track
Electromagnetic suspension and levitation
419
has been constructed to test a small vehicle which initially is to be towed by a rope at
speeds of up to 35 m s-1. This vehicle is 3 m long and weighs 150 kg.
Studies are also being carried out by a consortium of Siemens, AEG and Brown
Boveri in Germany at Erlangen and a vehicle has undergone preliminary tests on a
280 m diameter circular track (Guthberlet 1974, Uranker 1974). It is believed that, due
to the unresolved problems of guidance and eddy current drag, the activity at Erlangen
is now (1979) concentrated more on superconducting synchronous linear motors than on
levitation. However, the Erlangen vehicle was reported as having achieved levitation at
speeds in excess of 100 km h-1.
2.4. Levitation using induced eddy currents
A force of repulsion is generated between a coil carrying alternating current and an
electrically conducting surface when placed in the proximity of the coil so that the alternating magnetic field of the coil induces eddy currents in the conductor. This effect can be
utilised for the levitation of conducting objects and one of the early patents purporting
to do so is that of Anschutz-Kaemfe (1923a) in gyroscopic applications. This technique
has also been used for simultaneous levitation and melting of specimens (Orkress et aZl952)
Tubulor copper
conductors
I\
~
Molten m e t a l
y~
L
Figure 4. L.evitation of molten metal using eddy currents.
a t 10 kHz for zone refining of metals (figure 4). This technique is useful in laboratories
for the preparation of small quantities of alloys without contamination from crucibles.
A plate levitator in which two concentric coils carry 50 Hz currents in opposite directions and can levitate a circular conducting plate in stable conditions is described by
Bedford et a1 (1939) and several other experimental systems for levitation of plates,
spheres, etc, are described by Laithwaite (1965). More recently, however, due to developments in linear induction motors, particularly of the transverse flux type (Laithwaite
et al 1971, Eastham and Laithwaite 1973) it has been claimed that such machines might
be used for combined levitation and propulsion of high-speed vehicles (Eastham and
Laithwaite 1974). On the basis of a great deal of experimental work on relatively small
models it is suggested that due to scaling laws for electromagnetic machines (Laithwaite
1973b) combined levitation and propulsion schemes, employing linear induction motors
for vehicles weighing in excess of 50 tons, may have performances comparable to that of
the superconducting magnet schemes. One of the advantages claimed for such schemes
termed the ‘magnetic rivers’ is that they offer the possibility of lift and guidance where the
motor necessary for propulsion is the source of such facilities. It is also claimed that for
a particular thrust the secondary power input in a levitating linear motor will be the
same as in a machine designed for thrust only. Obviously a great deal of work, particularly theoretical, needs to be done. It is not easy, none the less, to envisage such dramatic
improvements to primary reactive power input for large airgap operation, claimed as one
420
B V Jayawant
of its advantages, as to make the performance extrapolated from small models seem
unrealistic. Results of a calculation by Eastham (1978) are given in $5.3 and they largely
bear out the pessimism expressed here. The ideas involved are, however, extremely
ingenious and regardless of the levitation aspects the use of transverse flux machines only
as propulsion units remains very promising.
2.5. Levitation using forces acting on current-carrying conductors situated in magnetic
fields
The force acting on a conductor of length 1 carrying a current I and situated in a transverse magnetic field of intensity B is given by BIZ and the force acts in a direction normal
to both the conductor and the magnetic field. Pfann and Hagelbarger (1956) report as
having supported the molten portions of a metal rod undergoing zone melting by locating
the molten portion in a transverse magnetic field and passing a current through the rod.
Although the current is adjusted to give an upward force approximately equal to the
weight of the molten metal surface tension also contributes to keeping the molten zone
in place. The heating of the molten zone is carried out either by induction heating or by
a torch flame. Thus, unlike the eddy current levitation technique the functions of melting
and levitation are kept separate. Rods of iron, nickel and tin have been levitated by this
method.
A variant of the same technique was proposed by Powell (1963) for the levitation of
a vehicle over two parallel superconducting rails carrying a persistent current. Attached
to the vehicle are two superconducting inverted troughs which ride over the rails without
touching them. Levitation is effected by persistent currents flowing in the longitudinal
wires of which the troughs are constructed. The troughs are designed to give the vehicle
stable equilibrium both vertically and laterally. In his paper, which contains technical
and economic calculations and a report of preliminary experiments, Powell estimates that,
with a current of 300 000 A and a trough radius of 18 in, a weight of 3400 lb ft-1 could be
supported. The idea does not seem to have been taken up by anyone since its publication
and a recent discouraging report about the prospects for superconducting cables (Skinner
and Edwards 1978) would suggest that it is not likely to either, on both technical and
economic grounds.
2.6. Suspension using a tuned L, C, R circuit and an electrostatic force of attraction
An electrically conducting shaft or rotor may be held in suspension by electrostatic forces
between a pair of electrodes where one of the electrodes is the body to be suspended. The
suspended body and the fixed electrode form the capacitance element of a tuned L, C, R
circuit in such a manner that the potential difference between the two electrodes increases
as the distance between them increases and vice versa, i.e. the circuit is tuned to resonate
with capacitance values less than those at the suspension gap. The electrodes must be
maintained at a potential difference of several kilovolts. The applications of this principle
have been investigated for vacuum gyroscopes (Nordsiek 1961, Knobel 1964). This
technique does not appear to have been pursued as extensively as the one using the
magnetic force of attraction in tuned L, C, R circuits. It is, however, almost certain that,
besides the problem of high voltages required to achieve suspension, this method also
suffers from inherent instability due to the use of tuned circuits and the problems of
providing damping and high reactive power are just as adverse as in the L, C , R systems
employing variation of inductance with gap.
Electromagnetic suspension and levitation
42 1
2.7. Suspension using a tuned L, C, R circuit and an electromagnetic force of attraction
As already indicated in the previous subsection this method has been investigated very
extensively, particularly at MIT (Gillinson et al 1960, Frazier et a1 1974) and the
University of Virginia (1962), and also by Cambridge Thermionic Corp. (1963, 1975) and
General Electric Co. (USA) (1963). Interest seems to have revived in this technique
again in the late sixties in Japan (Hagihara 1974), Israel and the U K (Jayawant and Rea
1968, Kaplan 1967, 1970). The variation of inductance of an electromagnet in the proximity of a ferromagnetic body, depending on the separation between the two, is utilised
in this method to regulate the current and hence the force of attraction. This is achieved
(figure 5) by incorporating the electromagnet within an L, C, R circuit tuned in such a
way that when the object to be suspended moves away from the electromagnet the circuit
tends to become resonant, thus increasing the current and hence the force acting on the
object. Conversely, when the body moves towards the electromagnet the current and the
Electromagnet
Bar o f magnetic
material
Figure 5. Geometry and force-distance curves. A
DC
excitation, B
AC
excitation with series capacitor.
force of attraction diminish. If, therefore, the force of attraction is balanced against that
of gravity at some distance of separation it is possible to get a statistically stable sit point
for the suspension of the body. However, tuned circuits possess large time constants
which means that once disturbed from this static stable point the object usually goes into
a divergent oscillation unless some means are employed to control and speed up the current changes or to provide damping in some other manner. Kaplan (1970) found that at
frequencies of the order of 6-26 kHz leaky capacitors ranging from 0.4-0.02 pF provided
adequate damping to obtain suspension of a ferrite disc and rod weighing 7.5 g and
13.5 g, respectively. Others have used oil damping by submerging the body to be
suspended in oil.
The stiffness of suspension using the AC tuned circuit method tends to be rather
low for many applications. The main disadvantages, however, stem from the fact that
at the static sit point the circuit is predominantly inductive and hence reactive power
input is rather large and that the iron structure including the object to be suspended must
be laminated. Thus, although this method seems to offer at first sight an inherently
stable force-distance characteristic (Jayawant and Rea 1968) and, therefore, considerable
B V Jayawant
422
advantages for the suspension of ferromagnetic bodies, rather disappointingly it suffers
from severe drawbacks and thus has not resulted in any practical applications.
2.8. Suspension using controlled
DC
electromagnets
This method, at the present time, is by far the most advanced technologically and is the
subject of world-wide investigation not only for advanced ground transportation schemes
but also for application in contactless bearings for both high and very low speeds.
The first proposal for a controlled magnet attraction scheme appears to be by
Graeminger (1912) for a vehicle suspended below an iron rail by a U-shaped electromagnet carried on the vehicle facing the underside of the rail. A gap was to be maintained
between the electromagnet and the rail by a mechanical or fluid pressure-sensing device
which would vary a resistance in series with the magnet winding or vary an airgap in the
magnet core. As it stood the proposal did not have any practical potential. AnschutzKaempfe (1 923b) then suggested contactless centering of a floated sphere containing
gyrorotors using electromagnets. Position sensing was to be achieved by measurement
of the resistance of the conductive fluid between the inner and outer spheres. Alternating
current was also to be supplied to the support rails so that the eddy currents induced in
the inner sphere would centre it by repulsion. The first amongst the present generation
of suspension schemes using active control of current in electromagnets, however, is
probably due to Kemper (1937, 1938) who proposed a vehicle suspended by electromagnets attracting to the underside of a rail using either capacitive or inductive means of
sensing distance below the rail. Part of the circuit also yielded a voltage proportional
to the rate of change of the airgap for damping of the vertical oscillations. Kemper
constructed a model consisting of an electromagnet with pole faces of 30 cm x 15 cm
and suspended a mass of 210 kg. The airgap flux density was 0.25 T, the airgap 15 mm
and the power consumption 270 W. This remained the heaviest weight to be suspended
using any method of electromagnetic suspension or levitation until the demonstration of
their 6.5 ton vehicle in 1971 by Messerschmitt Bolkow-Blohm (MBB) in West Germany.
Much of the published work after that of Kemper on the development of the electromagnetic suspension scheme using controlled DC electromagnets and external positionsensing was at the University of Virginia, particularly on rotor suspensions. The work
carried out by Holmes (1937) and Beams (1937) was for rotors of high-speed centrifuges
required in the fields of biology and medicine, typical speeds being 77 000 RPM for a
3.97 inm diameter rotor. The other applications proposed were for testing bursting
speeds of spheres such as ball bearings, testing adhesion of metal films, turbo-molecular
pumps for use at high vacuum free of bearings requiring lubricants, and magnetic suspension balances capable of recording weight changes of 5 x 10-11 g in a suspended
weight of 2.3 x 10-6 g.
The same principle has been used to suspend aircraft models in wind tunnels
(Tournier and Laurenceau 1957, ONERA 1960) and appears to be the first instance
of control of the three degrees of freedom of a suspended body. Since the objectives are
to determine the forces acting on the aerodynamic model the system is in effect a balance.
Apart from the fact that it is virtually impossible to make an interference-free wake-flow
field without a suspension system, the accuracy of such a scheme is more compatible
with recent requirements in aerodynamics. Further magnetic suspension helps the
investigation of more subtle aerodynamic details and improves techniques for studying
aerovehicle stability (Clemens and Cortner 1963, Covert and Finston 1973). The
importance of the method can be seen by the fact that all major aerodynamic research
Electromagnetic suspension and levitation
423
centres in the world have resorted to it at one time or another. Although this application
appears to have originated in France (Tournier and Laurenceau 1957, ONERA 1960)
it was soon taken up by others; in the U K at the University of Southampton (Judd and
Goodyear 1965) and the RAE (Wilson and Luff 1966) ;in the US at MIT-ARL (Chrisinger
et a1 1963), AEDC (Crain 1965), University of Virginia (Jenkins and Parker 1969),
Princeton University (Dukes and Zapata 1969), University of Michigan (Silver and
Henderson 1969) and NASA (Kilgore and Hamlet 1966).
There has been considerable activity since 1971 in the field of advanced ground
transportation schemes using controlled DC electromagnetic suspension, the first demonstration being that of the 6.5 ton vehicle by MBB operating on a 700 m track. This was
closely followed by another demonstration in Germany by Krauss Maffei in 1972, by
the author (Jayawant et a1 1975) at the University of Sussex (figure 6 (plate)), Japan Air
Lines and General Motors in 1975 and, finally, British Rail (Linder 1976). It was reported
in 1977 that the two separate developments in Germany had been merged into one
programme and that this consortium had tested (Gottzein and Cramer 1977) a rocketpropelled vehicle Komet I1 on a 20 km track at speeds in excess of 400 km 11-1. They
also demonstrated a 68 passenger, 35 ton vehicle on a 700 m track at a transport exhibition in the summer of 1979 (figure 7 (plate)). Now AEG, Siemens and Brown Boveri,
besides MBB and Krauss Maffei, are involved in the development of a 31.5 kin track
between Meppen and Papenberg in Enisland and a 121 ton vehicle is under construction
(figure 8 (plate)). This is due for tests in 1982 and the unusual feature of this scheme is
that the track is to have an air-cored winding of a (long stator) linear motor whereas the
vehicle will have superconducting excitation xagnets, i.e. the drive will be a long stator
linear synchronous motor.
There were two development projects in Japan; one appears to be a joint universityindustry collaborative venture which produced a 1.8 ton vehicle, whilst in the more widely
known development of Japan Air Lines the 1 ton vehicle has been followed by the demonstration of a 2.3 ton, 7 m long coach (figure 9 (plate)) capable of carrying eight passengers
(Nakamura 1979). This development is specifically aimed at linking the two airports of
Tokyo, one at Nerita and the other at Haneda, and plans are that these links will be
operational by 1985.
2.9. Combined suspension and propulsion schemes
Although not very far advanced some interesting proposals have recently arisen (Ross
1973, Eastham 1977, Edwards and Antably 1978) for combining the two functions,
propulsion and suspension, into one. The first to investigate this were Rohr Industries
who deinonstrated a 3.6 ton vehicle which uses a linear induction motor for both propulsion and lift. The disadvantage of this proposal is that the track has to have ‘rotor’ bars
to enhance the induction action. On top of this, linear induction motors are not necessarily the most ideal form of propulsion unit for high-speed vehicles. Alternatives have
been suggested by Edwards and Antably (1978) and Eastham (1977) to use either reluctance machines or synchronous machines. The linear reluctance machine would require
inert steel segments embedded in the track and control of both voltage and frequency
applied to the ‘stator’ on the vehicle ; voltage to control the suspension gap and frequency
to control the speed. With the linear synchronous motor it is possible to put both DC
(excitation) and AC windings on the same member (figure 10) and then the iron plates may
be embedded in the track whereas the wound members are on the vehicle. It is also
claimed that there is very little weight penalty arising out of the additional DC windings
424
B V Jayawant
on the same frame. Unlike the Rohr Industries investigation the Edwards and Eastham
proposals are very much at an early experimental stage but look very promising none
the less.
The vehicle demonstrated by MBB (figure 7) in Hamburg in June 1979 was also
propelled by linear synchronous motors. The two stator windings are on the track and
thus the motors may be called long stator motors. The DC lift magnets are small modules
and act as excitation magnets for the synchronous motors whilst attracting against the
face of the laminated long stator. This construction would, on the face of it, appear to
be very expensive in track construction. Hence the proposal to employ air-cored windings for the linear motor(s) on the track and superconducting excitation magnets on the
vehicle in Emsland would seem to be more economical as well as eliminating the need
Figure IO. Possible geometrics of linear synchronous motors with passive track. (a) Homopolar-inductortype linear synchronous motor, (6) transverse-flux homopolar machine.
to pick up power for the propulsion units through sliding contacts at high speeds, a
problem which as yet has not really been solved.
2.10. The mixed p system of levitation
Earnshaw’s discussion (1 842) of the stability of bodies in inverse square law fields showed
that any equilibrium in such fields is not stable. This result also applies to fixed charge
or current distributions in free space but not to systems whose permeability differs from
that of free space. Braunbeck’s (1939a, b, 1953) extension of this theoretical analysis is
that where permittivity or permeability of the system is somewhere less than that of free
space, when dielectric or magnetic bodies are present, stability is possible. Bevir (1976)
has recently examined in more detail mixed systems where permeability in some places
is less than that of free space but is greater in some other places and has shown that in a
few cases stable suspension can be obtained.
A necessary but not sufficient condition for stability is V F < O where F is the force
425
Electromagnetic suspension and levitation
vector acting on a body and the following table (Rutherford Laboratory and Culham
Laboratory 1976) indicates how the sign of V F may depend only on the nature of the
system and not on its geometry. This table, therefore, indicates that there exists a class
Table 1.
System
Permeability
VF
Stability
Normal conductors with
constant current and
orientation
cL=
0
Marginally stable
10
Unstable
Constant current coils with ,U < PO
superconductors, eddy
currents or constant flux coils
<O
Stable operation
possible
Mixed system of coils, iron
and superconductors
>O
Stable operation
and
possible
<O
in different regions
Constant current coils
and iron
CL0
II’cLO
p> po
and
cL< PO
of mixed systems with materials both of p > po and p < PO,i.e. iron and superconductors
as well as normal conductors with eddy currents or constant flux coils which should
provide stable suspensions.
These theoretical predictions have been verified (Homer et a1 1977) in three small-scale
experiments (figure 11 (plate)). In the first experiment iron washers or nuts weighing
1.5 g, in the second experiment small iron disc 27 mm diameter x 20 mm long but using
both a superconducting coil and a superconducting screen, whilst in a third experiment
using two superconducting coils a much bigger iron cylinder 110 mm diameter x 40 mm
long weighing 100 g have been stably suspended. The geometry of the third experiment
is claimed as the more suited to passenger vehicle application. No results are as yet
available for this configuration nor is it easy to visualise a geometry which would be
suitable for the vehicle application. In any case, a great deal of work is needed not only
on larger models but also on the control aspects before claims for the superiority of this
method over others can be taken seriously. It is, however, an extremely ingenious
technique.
2.1 1. Contending systems f o r practical applications including advanced ground transportation
Whilst all the systems described in $1.1 have been thought of at one time or another as
capable of practical application only three or four remain in contention as applicable
to advanced ground transportation or vehicles capable of carrying passengers. Besides
the vehicle application there remains the important area of contactless bearings. This has
not received nearly as much attention from the popular media, which is to be expected,
but also from industry where the possibilities of contactless suspension and the benefits
accruing therefrom are limitless.
Attention will be focused mainly on the methods below in the following sections
although some of the other methods will be expounded more fully in an appropriate
426
B V Jayawant
context. The four methods are (i) use of permanent magnets in repulsion, (ii) use of
superconducting magnets, (iii) use of mains frequency currents to generate eddy currents
and repulsion forces, and (iv) use of controlled DC electromagnets.
3. Levitation using permanent magnets
Within the last decade or so a new class of materials for making permanent magnets has
been developed based on cobalt and some rare-earth elements. The improvement is so
great that the cobalt-rare-earth magnets are in a class by themselves. In terms of their
resistance to demagnetisation the new materials are 20-50 times superior to the previous
best Alnico and their magnetic energy is 2-6 times greater. Whilst, therefore, there have
been innumerable attempts to use the force of repulsion between permanent magnets for
applications such as load relief in bearings (Geary 1964, Jayawant 1981), the older materials have suffered from drawbacks of demagnetisation, if not actual reversal of one of the
magnets in the case of a mismatch, and relatively weak forces of repulsion. The new
cobalt-rare-earth materials have now radically altered this picture. Like poles of such
magnets can be made to approach without suffering more than a small percentage loss
in magnetism and even this loss is mainly reversible. Such magnets can be brought
together an infinite number of times and after the first two or three times the force of
repulsion does not change. A current-carrying coil on one of these magnets can be
energised in a direction completely reversing the effective polarity of the combination
and yet when the current in the coil is removed the magnet remains virtually unaffected.
The design of magnets for repulsion devices or for the applications involving combination with current-carrying coils involves new ideas and new methods as well as some
understanding of the magnetic properties of the new materials.
3.1. Properties of permanent magnets and magnetic materials
Ferromagnetic elements have atoms in which one electron shell contains fewer than the
maximum number of electrons. In such unfilled shells there are one or more unbalanced
electron spins giving rise to a small magnetic moment and making the atom itself a tiny
magnet. Ordinarily in a large collection of such atoms the atomic magnets point in various directions and cancel one another. If a sample of ferromagnetic material is placed
in a magnetic field, however, the individual atomic magnets tend to line up so that when
the sample is removed from the field, it retains a net residual magnetism. The total
magnetisation indicated by the symbol M is the sum of the contributions of all the
elementary atonic magnets. Magnetisation in any direction reaches its saturation value
when all the atomic magnets are parallel and pointing in that direction.
Magnetic materials are divided into two categories, hard or soft, depending on the
ease with which they may be magnetised and demagnetised. A hard material has a
wide hysteresis loop and a soft material has a narrow one. Each reversal of a loop
represents energy lost. Therefore, soft materials are suited for certain electrical devices
such as transformers where the material is subjected to a reversal of magnetisation many
times a second. Hard materials, on the other hand, are what one is looking for in the
applications of permanent magnets, particularly those utilising the forces of repulsion
such as in suspension or levitation since the width of the hysteresis loop determines the
intrinsic coercive force. This width can range from less than one hundredth of an
oersted (1 Oe=79.6 A m-1) in alloys used in telephone equipment to tens of thousands
Electromagnetic suspension and levitation
427
of oersteds in the new cobalt-rare-earth magnets. For comparison the Earth’s magnetic
field is just under half an oersted.
Magnetic materials are generally described by their hysteresis loops in which the
vertical axis is the total flux density B rather than the magnetisation M . The total flux
density includes the contributions of both magnetisation and field strength H. In electrical
engineering the performance of devices is much more closely related to the total flux
density. In the field of the physics of magnetic materials, however, the magnetisation M
is an indication of what the material does in response to a magnetic field and thus both
B and M are useful.
The upper left-hand quadrant of a B-H loop is important from the engineers’ point
of view in trying to determine the quality of permanent magnets. This is illustrated in
figure 12. Three points on this part of the curve are significant. The first is the crossing
of the vertical axis, i.e. where the magnetising field has been removed but the material
retains its magnetisation. This is termed remanence Br. If, now, the magnetising field is
actually reversed, the value of the imposed field, H,, which reduces the total flux density
(HI-(+)
Figure 12. B-H loop of a permanent magnet illustrating the point where the product B-H is maximum.
Br is the remaining flux when H is zero and Hc is the value of H required to reduce B to zero.
(-)---Magnetic
field
to zero is called the coercive force. Furthermore each point on the loop represents some
value of BH. The point where this value reaches a maximum is known as the maximum
energy product (BH)max. This maximum has been used as an index of quality for
permanent magnets.
A field equal to the coercive force applied to Alnico magnets on the one hand and to
the new rare-earth magnets on the other produces remarkably different results. Once
the Alnico magnet has been driven to zero flux density the flux rebounds only slightly.
With the cobalt-rare-earth magnets, however, whilst it is possible to drive the total flux
density to zero, as soon as the coercive force is removed the flux density rebounds almost
to its original value. The reason for this is that the cobalt-rare-earths have values for
‘intrinsic coercive force’ which are many times larger than their values for ordinary
ferromagnetic materials. As a consequence a demagnetising field can drive the total
flux density to zero or even below without affecting the intrinsic magnetisation M of the
material. This resistance to demagnetisation does not appear in the quantity ‘maximum
energy product’ but it is equally important in the context of these new magnetic materials.
Cobalt-rare-earth materials have values of intrinsic coercive force from 20-50 times
greater than those of conventional permanent magnets.
27
B V Jayawant
428
The property of the new rare-earth magnets to resist demagnetisation makes it
possible to envisage many new applications and permanent magnet motors and alternators have already become established. In the context of the subject of this review
repulsion forces between permanent magnets to support passenger carrying vehicles or
trolleys capable of being moved about, say in factories, become technically feasible. If
gaps between opposing poles of disc magnets are compressed to the same extent it can
be seen from figure 13 (plate) that weights which can be supported by three magnetic
materials, Alnico, barium-ferrite and cobalt-samarium are in the ratio of 2 :5 :23. This
means that if a 10 ton weight or vehicle is to be supported using ferrite magnets the total
weight of the magnets, including those on the track as well as on the levitated body,
would be nearly 2 tons. The weight of the levitated body or the vehicle would be 11 tons.
If cobalt-samarium magnets were to be used the total weight of the magnets would be
only about ton and thus the weight of the vehicle including the magnets would now
be 10.25 tons.
+
3.2. Permanent magnets for repulsion levitation
A corollary of Earnshaw’s theorem is that it is impossible for a body to be held in stable
equilibrium against displacements in all directions if the system is constituted of permanent magnets only. When all the restoring forces are generated by repulsion between
permanent magnets there remains at least one direction for which the body is in unstable
equilibrium; the smallest displacement in this direction brings into being a force which
tends to increase the displacement.
Complete levitation without any mechanical contact has been achieved by means of a
combination of permanent magnets and electromagnets. Backers (1961) describes a
magnetic journal bearing in which a shaft is supported with radial bearings of permanent
magnet rings and support or axial location is provided by controlled electromagnets.
3.2.1. Levitation of vehicles and estimation of repulsion forces. Several advantages are
claimed for vehicle systems using ceramic magnets in repulsion and electromagnetic or
mechanical guidance systems. Some of them, such as absence of noise and vibration
with reduced maintenance, are common to other suspension and levitation systems.
Particular to ceramic magnet systems, however, are complete absence of the provision
of energy to achieve lift, absence of induced eddy currents in the track since the track is
non-conducting, thus obviating a drag force, and possibly lighter vehicles than with other
schemes.
On the debit side it is doubtful whether a track consisting of permanent magnets can
be constructed as cheaply as from mild steel rails even if modern magnetic materials can
be produced in the large quantities required for track laying. It is just conceivable with
barium-ferrite but barely so with cobalt-samarium and its descendants. The other
factors on the debit side are related to the provision of guidance forces and forces for
controlling the ride quality. As is suggested, any schemes which use controlled DC
electromagnets would detract from the advantages claimed above as well as having to
use two different technologies. Finally the problem of attracting debris to the track is
probably far more serious and hazardous than so far indicated.
The Westinghouse Co. in America was the pioneer in this field and was the first to
suggest the use of ceramic magnets for transport applications. A one-passenger vehicle
was developed at Westinghouse Research Laboratories (Westinghouse Engineer 1965)
in the early 1960s. The main proponent of such schemes in Great Britain has been
Electromagnetic suspension and levitation
k----
-i
Lildth 2 6 i t
I Long span support,
Sheet steel c o w
o w both tracks
1 suspension bridge type
/
-
Vehicle 6 0 f t long f o r
5 ton payload-either 50
seated passengers or freight
429
1
Short span support
at Soft
Figure 14. Polgreen’s proposed rail configuration for vehicles using permanent magnets in repulsion.
x , space for linear motor propulsion; s, secondary suspension for passenger comfort.
(Reproduced by permission of J R Polgreen.)
Polgreen and figure 14 shows Polgreen’s proposed rail configuration. This arrangement
of rails with a steel backing is also favoured by Bahmanyar and Ellison (1974) as it is said
to increase lift forces by better utilising the available flux and also provides better
mechanical protection for brittle magnets.
3.2.1.1. Experimental estimation of forces. The calculation of the forces of repulsion
between magnets is difficult and in general even when scaling up based on experimental
results it may be subject to considerable errors. McCaig (1967) has outlined a method
based on experimental results for a few configurations of Ferroba 111 magnets illustrated
in figure 15 in which the repulsion force per unit area of the magnets is plotted against
200
UEuIEI
\
0
I
I
I
05
10
1s
d/l
Figure 15. Repulsion forces between Ferroba I11 magnets.
430
B V Jayawant
distance of separation divided by magnet thickness (called reduced distance). The
repulsion force is defined as the total weight supported/magnet face area with faces
separated by a distance d at which the product force x distance is a maximum. The force
increases with decreasing distance approximately so that it is doubled at d/2.4 and
quadrupled at zero.
The force of repulsion depends upon the magnet material, the arrangement of poles
as described, the area, the shape and thickness of the magnets, the distance between the
repelling pole surfaces and the dimensions of any steel parts used. Although these factors
make the prediction of force difficult, if the same materials and configurations are used,
a correct use of the method of similitude can enable the forces to be estimated for other
systems in which all the dimensions and distances bear the same ratio to the one for
which experimental results are available, since the distribution of magnetisation and
polarity in the magnets should be the same. The force of repulsion should vary as the
superficial area of the magnets, i.e. as Lz where ‘L’ is any linear dimension. Since the
volume, and therefore the mass, of the system varies as L3, the force per unit mass varies
as L2/L3=L-l. It thus appears that for any material and arrangement there is a maximum
size above which the magnets cannot levitate their own weight. This argument is valid if
the distance between the magnets is increased as their size increases. In practice the
distance of separation is more or less constant and increased loads can be supported by
an increased number of magnets.
The weight of the supported magnet is subtracted from the force of repulsion in figure
15, but not the weight of any steel parts. If, for a given pair of magnets, the force of
repulsion, F, is measured for different distances of separation d there is some value for d
for which the product Fd is a maximum. This may be considered the optimum condition
for the given arrangement. The quantities (F/A)o,t and (d/L)optfollow from this notion
of optimal distance. Finally the quantity Fd/AL is a measured of the value of the product
Fd per unit volume of the supported magnet.
The arrangements using mild-steel pole pieces are very efficient but in assessing the
merits of different systems the weight of any mild steel in the support magnet must be
taken into consideration. The cross section of the flux paths must also be sufficient not
to cause losses due to saturation.
3.2.1.2. Analytical estimation of repulsion forces. The force of attraction between two
magnets is given by the expression F= B2/2,poper unit area. The flux density is assumed
in this case to be uniform but when magnets are in repulsion this assumption is no longer
valid. In fact, if two identical magnets were held in close contact the flux density would
be zero but the force would be maximum. In order to arrive at the correct estimate it is
necessary to consider the influence of one magnet on the magnetisation of the other.
This may be possible by considering each magnet to consist of a distribution of poles,
dipoles or current loops. McCaig (1961) has attempted an analysis of the forces of repulsion between small disc magnets by considering each to consist of a number of elementary
charged layers. Alternatively, the same result could be obtained by treating each magnet
as a charged surface. With these methods it is essential to evaluate the mean flux density
or its gradient at various levels above the supporting magnet. It is necessary to use
weighting functions to take account of the non-uniform field distribution in order to
obtain satisfactory results. Bahmanyar (1973) claims to have circumvented these difficulties. It is assumed that the magnetisation vector is everywhere perpendicular to the
pole face and that the upper part of the magnetisation curve is parallel to the H axis of
the B-H graph. This is largely true for the modern high-coercivity-large-remanance
Electromagnetic suspension and levitation
43 1
ceramic magnets. The first step is then to compute the normal, i.e. the force-producing
component of the flux density, B,, due to the supporting magnet at every node of two
p x q field matrices coincident with the two pole faces of the supported block. p and q are
made as large as can economically be handled by a computer. Two directly opposite
elementary meshes ABCD and EFGH on the upper and lower faces of the supported
block are considered bound by rows j and j f 1 and columns k and k 1 of the field matrix.
Mesh length along the x axis (parallel to the direction of motion) is 6R (figure 16) and
along the y axis it is 6P. The gap length is assumed to be h and the magnet depth 2a.
Bahmanyar deduces that at a point height z above the supporting magnet B, is given by
+
and that the force of repulsion for this gap on the supporting magnet is
wherej and k refer to the rows and columns of the symmetrically superimposed repulsion
force matrix having nodes at the centres of each elementary mesh, M is the intrinsic
magnetisation and r and p are the dimensions of the magnet along the x and y axes,
respectively. The last two terms in equation (3.2) are the mean flux densities over the
elementary charged surfaces ABCD and EFGH, respectively.
Bahmanyar has extended this analysis to magnetic track rail as well as the steel-backed
structure similar to that proposed by Polgreen for Ferroba I11 (figure 17).
3.2.2. Cost of permanent magnet track. Some of the more general features of vehicle
applications are considered later. These include problems of guidance, suspension stiffness and therefore ride comfort. However, these questions must be preceded by a question
as to whether sufficiently large quantities of these ceramic magnets would be available to
j +1
Figure 16. Model used for repulsion force analysis using the ‘incremental mean flux density’ technique
of Bahmanyar (1973).
432
B V Jayawant
2
4
6
Airgap length icm)
.
0
--
2 0 40 6 0 80
Airgap length(cmi
Figure 17. Lift forces in permanent magnet repulsion systems. (a) Lift force as a function of airgap
length and rail spacing, (b) lift force-airgap characteristics of steel channel backed magnetic
rails. G=gap between magnet sides and channel, T=channel thickness. 0,
G= 3 cm, T= 1 cm;
0 , G = 5 S cm, T= 1.5 cm. U, v: ranges of load-carrying capacity. (Reproduced by permission
of the IEE.)
build the track. Taking the example of the 10 ton vehicle and assuming that it will be
6 m long (as long as a single-decker bus) the weight of magnets per metre will be 35 kg,
i.e. 25 ton km-1 or 60 ton mile-1 of track. The price of samarium-cobalt is approximately E1000 kg-1 but assuming that a cheaper version such as cerium-rare-earthcobalt magnets might cost E250 kg-1 the cost of track magnets alone will be in excess of
f 5 000 000 km-1, which does not seem prohibitive.
4. Levitation using superconducting magnets
There are, as indicated in $2.3, two ways in which superconductivity might be utilised to
obtain levitation. The first is the Meissner effect, i.e. rejection of magnetic flux causing
the superconducting body to behave as a perfectly diamagnetic body ( p r = 0). The second,
which is the more practicable for application to vehicles, relies on the force of repulsion
between a superconducting magnet moving on a conducting plate or guideway. This is
the method proposed originally by Powell and Danby (1966). In a manner almost analogous to the development of permanent magnets leading to the interest and possibilities of
transportation applications, the advances in superconducting materials has led to their
consideration for high-speed vehicles. These advances are briefly reviewed before
considering the levitation aspects.
4.1.Some properties of superconductors
The two properties mentioned in the previous section are the only ones of interest for the
purposes of levitation. It is, however, also noteworthy in passing that superconductors
Electromagnetic suspension and levitation
433
form part of a category of materials at temperatures approaching 0 K called superfluids
(London 1961). Two types of superfluids are known. One is represented by liquid helium
(boiling point 4.2 K) when cooled to 2.19 K. The other type is represented by the superconducting state of electrons. Kammerlingh Onnes (191l), the Dutch physicist, discovered the latter phenomenon with mercury in 1911. Just as electric charge is transferred in a superconductor without a voltage difference between its ends, so superfluid
helium can pass with ease through extremely narrow capillaries or fine cracks which
would be impassable for any ordinary liquid. Furthermore, superfluid helium allows an
extremely easy transfer of heat which has occasionally been described as ‘heat superconductivity’.
Using his techniques of liquefaction of helium, Kammerlingh Onnes measured the
electric resistance of various metals at liquid helium temperatures. He found much to his
surprise that the resistance of mercury drops suddenly to an immeasurably small value
when the temperature falls below a certain value (figure 18). This he determined to be
about 4.2 K, the so-called transition temperature of mercury. Kammerlingh Onnes called
Figure 18. Resistance of mercury as a function of temperature.
this phenomenon superconductivity and further discovered that this property is destroyed
when a strong magnetic field is switched on. He observed that there is a very sharp
transition for a well-defined magnetic-field strength when the field is oriented parallel
to the axis of the conductor and currents used for measuring resistance have low values.
The field necessary to destroy superconductivity, the so-called critical or threshold field,
depends on the temperature and disappears at the transition temperature with a finite
slope. The curve representing the critical field Hc as a function of temperature (the
threshold curve) has been measured for many superconductors (figure 19). It follows
that if an electric current is caused to flow in a superconductor of such a value that the
magnetic field due to it has a strength at the surface of the superconductor in excess of
the critical value the superconductive condition will be destroyed. The transition between
normal and superconducting states is reversible whether it is effected by changing the
field strength or the ambient temperature.
In general, there will be a magnetic field, however weak, surrounding a superconductor
which is being cooled below the transition temperature. As the superconductive condition
spreads through the material, at transition, pockets of flux may in practice become isolated and cut off between advancing fronts of the superconducting regions. The flux
in these pockets will be compressed between the advancing fronts to the critical value of
434
B V Jayawant
the flux density; then the surrounding superconductivity, so to speak, cannot get into the
pockets and the flux cannot get out. Thus it is difficult to obtain a superconducting body
which is entirely free of magnetic moment although the amount of magnetic moment is
likely to be of significance in components for special applications only, such as levitated
superconducting gyro rotors.
The materials discussed so far, which include many of the elements (pure metals),
are ideal or ‘soft’ superconductors. Practically speaking, transition with these materials
and the exclusion of magnetic flux, apart from the frozen flux, is sudden and complete.
Niobium and lead, which fall into this category, have high critical temperatures of 8 K
and 7.5 K, respectively, but niobium also has a high value of critical field of about
4000 Oe (318 x lo3 A turns). There are also non-ideal or ‘hard’ superconducting alloys
and compounds which remain partly superconducting when penetrated by strong magnetic
fields. They are being developed chiefly for the windings of superconducting electromagnets. Soft and hard superconductors differ in the manner in which they carry electric
currents. In a soft superconductor current is carried only in a thin surface layer. In hard
superconductors typical examples of which are compounds such as those consisting of
vanadium and gallium (VSGa) or niobium and tin (NbsSn) the current appears to be
carried by filaments inside the material and the number of filaments can be increased by
physically working the material. The effect of magnetic fields on a typical soft superconductor is also different from that on hard superconductors. When the field is low,
under 0.1 kG (0.01 T), both conduct current in a thin surface layer and the field is excluded
from the interior of the material. A moderate field of 1-10 kG (0.1-1 T) penetrates a
soft superconductor, thereby destroying its superconductivity. In a hard superconductor,
however, superconducting flow appears to be transferred to thin filaments and in certain
hard superconductors filamentary flow persists even in high intensity fields of 10-100 kG
(1-10 T) and beyond, making them candidates for magnet windings of high-field modern
superconducting magnets.
The synthesis of niobium-tin (NbsSn) was reported by Mathias (1957) as a compound
that becomes superconducting at 18 K and remains even today one of the materials with
Electromagnetic suspension and levitation
435
highest transition temperature. It was pointed out by Kunzler (1961) that this compound
satisfied the three essential requirements of a material suitable for the construction of
superconducting magnets : (i) the material must remain superconducting in a high
magnetic field; niobium-tin was found to be superconducting in a magnetic field of
88 000 G (8.8 T), (ii) the material must sustain a high current density in a high magnetic
field; niobium-tin was shown to sustain a current density in excess of 100 000 A cm-2 at
88 000 G, (iii) the material, even if refractory, must be capable of being fabricated into a
magnet coil ;niobium-tin is extremely brittle. However, if niobium-tin powder is enclosed
in LI niobium tube and then a monel metal jacket to act as an insulator and drawn through
successive reducing dies it is formed into a wire which is wound directly on a former.
The niobium-tin powder is converted into powder by heating the coil to a temperature
of looooc.
4.2. Principles of superconducting levitation
Reference was made in $52.3 and 2.10 to the two methods of using the superconducting
phenomenon. The first is the Meissner effect to which considerable effort has been
I
IEJ
Figure 20. Levitation of a bar magnet on a superconducting sheet.
devoted in order to levitate gyro rotors. The second utilises forces of repulsion arising
out of the interaction between a superconducting magnet and eddy currents induced in a
conducting sheet as a result of relative motion between the two. This is the effect which
seems the more practical for application to passenger carrying vehicles.
4.2.1. Levitation using the Meissner efect. When a bar magnet is brought near a horizontal superconducting surface we may regard the flux as being compressed into the space
between the magnet and the magnetically impermeable surface of the superconductor
(figure 20). Provided the compression of flux does not lead to the critical flux density
being exceeded, the magnet will float on the superconducting surface in stable equilibrium
in the vertical direction. If the surface is sufficiently large to be considered infinite in
relation to the size of the magnet it will be in neutral equilibrium in the horizontal plane.
It will, in effect, behave as if there is a mirror image of the magnet in the plane superconducting surface. When the size of the plane is reduced until the horizontal equilibrium becomes unstable stability can be restored by dishing the surface. The experiments
of levitating a bar magnet having dimensions of several millimetres above a saucer-shaped
superconducting surface were performed by Arkadiev (1945, 1947). There are reports of
other experiments (Schoenberg 1960, Harding and Tuffias 1960, Buchold 1962) but
Boerdijk (1956a, b) considered the possibility of levitating a magnet between an attracting
436
B V Jayawant
magnet and a superconductor in the same way as he levitated a magnet between an
attracting magnet and a piece of diamagnetic material.
Reported applications of this technique of using superconductivity to obtain levitation show that usually a superconducting object is levitated by flux from more than one
magnet and that the levitated object is usually a rotor. The magnets are usually superconducting rings or coils which carry persistent currents. Simon (1953) reports theoretical
and experimental investigations of the levitation of a superconducting hollow lead sphere
1.25 cm diameter and weighing 0.70 g over a pair of rings or coils carrying currents in
opposite directions or ring permanent magnets with their axes vertical. Although Simon
concluded that levitation was not possible over a single ring this was subsequently disproved by Harding and Tuffias (1960). This work, following the investigations of Culver
and Davis (1957), was directed towards the development of the ‘cryogenic magnetic
suspension gyroscope’. Harding and Tuffias report the analysis of different configurations
of superconducting current-carrying rings. They also describe other practical aspects
such as the method for starting persistent current in the superconducting ring and the
spot welding of niobium wire for making joints in the ring. Rotors were solid niobium
spheres or lead plated by electrodeposition or vacuum deposition on to sapphire, plastic,
aluminium or magnesium spheres. In the experiments described a 3.8 cm diameter
lead-coated sphere weighing 8 g was levitated above a single ring carrying 1000 A turns.
The largest sphere levitated was 4.25 cm diameter made of solid niobium weighing about
300 g. Buchold (1962) also reports work on cryogenic rotor gyros at the General Electric
Co. (USA). Construction of a cryogenic gyro with a niobium spherical rotor levitated
between 10 coils of niobium wire carrying persistent currents is described. The rotors are
typically 5 cm diameter with a wall thickness of 1 mm and weighing about 110 g. An
equatorial rim constitutes the armature of a cryogenic electric motor as the means by
which the rotor is driven up to speeds of 40 000-50 000 RPM. The rotor has a radial
clearance from its housing of just over 0.25 mm (0.12 in). The interior of the housing is
evacuated and vent holes provided in the rotor wall. Other features such as sensing of
rotor speed and attitude and refrigeration are also described. There is, in fact, a profusion of literature on cryogenic gyros and other devices emanating from the General
Electric Co. (USA) around the 1960s.
The motion of a superconducting body levitated over a current-carrying superconductor is very oscillatory. It is, however, made considerably less so by locating a
non-superconducting metal such as iron or copper near the current-carrying member.
Changes in the distribution of flux around the superconducting ring or coil due to the
approach and recession of the suspended body produce eddy currents in the nonsuperconducting metal and thus providing a means of dissipating energy.
4.2.2. Levitation using eddy currents induced b y motion of superconducting magnets. This
approach to magnetic levitation is based on the repulsion induced by a magnet travelling
above a conducting surface. Conventional electromagnets or permanent magnets are
also capable of induced levitation at small clearances but they are incapable of producing
magnetic fields of the size and intensity required for anything heavy like, for example, a
passenger carrying vehicle. Superconducting magnets due to their vastly greater magnetic
fields have made this possible.
The phenomenon of electrodynamic levitation, as this phenomenon is now called,
can be demonstrated very simply by spinning an aluminium drum at sufficiently high
speed and placing a suitably (curved) shaped magnet attached to a flexible cantilever
above it. The principle of this method of levitation is depicted diagrammatically in
Electromagnetic suspension and levitation
437
Figure 21. Principle of electrodynamic levitation systems.
figure 21. A current-carrying loop is assumed to be moving past a somewhat larger
short-circuited loop. As the magnetic flux from the travelling loop begins to link the
stationary loop it induces an EMF resulting in a current circulating in the loop and tends
to oppose the change in the magnetic flux linking the stationary loop. The induced voltage is proportional to dy/dt, i.e. to the rate at which the magnetic flux through the loop
is changing, and the current is determined by the inductance and the resistance of
the loop. When the moving loop is directly above the stationary loop the flux linking
does not change and the induced EMF falls to zero. The induced circulating current begins
to decay owing to resistive loss in the stationary loop, As the travelling loop begins to
move away from the stationary loop the flux linkage begins to decrease and the induced
EMF is now of a reversed polarity which not only brings the circulating current to zero
but produces a current in the opposite direction that is equal to the amount by which the
originally induced current has decayed. This residual current persists for a fraction of
a second after the travelling loop (or the vehicle carrying this loop) passes and is called
eddy current wake.
Both lift and drag are produced by the interaction of the two loops. Lift results from
the fact that the induced current in the stationary loop flows in a direction opposite to the
current in the approaching loop and therefore repels it. This repulsion alone would not
produce a drag as its mechanical equivalent is a wheel passing over a hump in the road.
All the energy lost in raising the wheel is regained when the wheel descends to its original
level. Unfortunately, in the electromagnetic case the current in the stationary loop decays
as the travelling loop passes and, therefore, not all the approach energy is recouped in
the departure. The energy lost is, therefore, equal to the resistive dissipation in the
stationary loop. The opposite current induced in the stationary loop due to decay is
attractive and, therefore, causes drag. An unusual phenomenon is that the faster the
vehicle carrying the current loops (which may be superconducting) travels the less the
drag is. Decrease of drag with increasing velocity is rare in any transportation system.
All the early investigators thought in terms of a guideway composed of discrete loops
or coils and there may in fact be an advantage in such arrangements. However, the loops
can be replaced by continuous conducting sheets without any fundamental change in
interaction. So long as the coil or the magnet is stationary the magnetic field is unaffected
438
B V Jayawant
by a conducting but non-magnetic sheet. As the current-carrying coil begins to move
eddy currents, which will be distributed in nature, are induced in the conducting sheet.
Their overall effect is to generate a magnetic field which opposes that of the moving
loop and to keep it from penetrating through the conducting sheet and in the process
giving rise to lift forces.
The induced currents do not become strong enough to oppose the penetration of
magnetic field through the sheet and to keep it out entirely until the current loop has
reached a sufficiently high speed. Eventually when the current loop, if driven at an
increasing speed, reaches this speed, virtually none of the magnetic flux is allowed to
penetrate. The conducting sheet now behaves as a magnetic shield. The moving loop
sees an image loop but of opposite polarity equidistant from the surface of the conducting
sheet and thus repelling it. The force of repulsion becomes larger the smaller the distance
of the moving loop from its image.
The main characteristics of electrodynamic levitation can be explained even with just
these basic principles. If a current-carrying coil accelerates at a constant height above a
conducting guideway it experiences a lift force at first proportional to the square of the
velocity but eventually reaching a limiting value. The drag force is at first proportional
to the velocity but then passes through a peak and decreases inversely as the velocity.
At high speeds the drag decreases more slowly because of the skin effect. The induced
eddy currents are largely confined to a thin layer near the surface of the conducting sheet
and consequently the guideway appears to have higher resistivity. The electromagnetic
drag, unlike the aerodynamic drag, decreasing with increasing speed is a remarkable
feature of electrodynamic levitation. The lift force is proportional to the product of the
perpendicular and parallel components (to the guideway) of the magnetic field and the
drag is proportional to the square of the component of the magnetic field perpendicular
to the surface of the guideway. The lift to drag ratio is, therefore, proportional to the
ratio of the parallel component to the perpendicular component of the magnetic field.
This relationship gives some insight into the way the configuration of the magnets on a
vehicle can be optimised.
An interesting but very rough guide (which completely ignores the problem of overcoming the drag force) is that if the magnetic field at the surface is about 20 kG (2.0 T)
sufficient force will be generated to just support the magnet and its notional payload at
speeds as low as 20 inile h-l(32 km h-1) and the limit of the lift force will be very nearly
reached at 60 mile h-1 (approximately 100 km h-1). The lift force will be 60 lb in-2
(4.2 x IO4 kg m-2), the same as the pressure in the tyres of a bus. It is, therefore, suggested
that magnets about the size of the footprint area of a bus wheel tyre will levitate a bus;
a suggestion which inspired the early investigators of a wheelless train.
4.2.3. Some design considerations of passenger carrying vehicles with cryogenic magnets.
The principal considerations in the context of the electrodynamic system of levitation for
passenger carrying vehicles are not only the geometry and configuration of the superconducting magnets but the propulsion schemes as well. Although the levitation system is
capable of operating at large airgaps the linear induction motors require a much smaller
gap. Current studies indicate that the linear motor and its control gear also represent a
substantial fraction of the overall weight of the vehicle since the peak of the drag force
occurs at speeds of approximately 10 mile h-l and the thrust required to move past this
is prohibitively high. At the upper end of the speed range collection of power of the
order of several megawatts through sliding contacts would present very formidable
problems. Additionally, ride quality studies indicate that a guideway surface equivalent
Electromagnetic suspension and levitation
439
to a poor road surface can be tolerated with the high clearance levitation but, without
some form of active damping, the inherent oscillatory nature of the suspension will fail
to satisfy the passenger comfort criteria. Not only does the lift mode need to be damped
but also the lateral guidance. The problem of lateral guidance is indivisible from the
design of the guideway. This discussion precludes any economic or environmental
considerations of a new guideway alignment such as that envisaged for any advanced
ground transportation scheme on the grounds that these will be similar for any new
schemes irrespective of the technology.
4.2.3.1. Repulsion and drag force estimation. The generation of lift force with superconducting levitation schemes of this type is essentially a dynamic or speed-dependent
phenomenon. There is, therefore, no lift force at zero speed and insufficient force until
a certain speed is reached. Hence the vehicle must be supported in some fashion below
such speeds and the commonly suggested solution is wheels. As the vehicle speed increases,
for a magnet at constant height, the lift force FL increases rapidly at first and then levels
off approaching the image force FI at high speeds (Borcherts et a1 1973) (figure 22). FI is
the force between the coil and its image in the guideway at high speeds. As explained in
54.2.2 there is also the drag force FD on the moving coil as a consequence of the eddy
current or Joule loss in the guideway. FD also goes through a peak at about 10 mile h-l
and then drops off continuously as the speed is increased. The relatively low value of the
magnetic drag at high speeds will add to the efficiency of this suspension (figure 23).
~~~
0
100
I
300
2M)
/
l
'
1
I
400
4 8 3 k m h-'
:
0
50 100 150 200 250 300mph
b
loo
200 300 WM 4 8 3 k m h-'
V
Figure 22. Drag characteristics for electrodynamic levitation systems. (a) Lift force FL,drag force FD
and lift to drag ratio on two rectangular coils above an infinitely thick aluminium slab as a
function of speed. (The second dimension of the coils is in the direction of the motion.)
-, theory, 0,experiment: 2.12 x 4.67 cm2 coil, h=4.22 cm. ---, theory, 0 , experiment:
4.67~
2.12 cm2 coil, h=4.22 cm. (b) Lift force FL and FL/FD(lift to drag ratio) on a coi1
over an aluminium plate as a function of speed. FIis the image force. 0.5 x 3 m2 coil, h=0.3 m,
2.54 cm A1 plate. (Reproduced by permission of the IEEE.)
B V Jayawant
440
High-speed l i m i t
I a)
'I2x
0
200
100
100
200
300
300mph
400 &km h-'
0
2
3 m2 coil
4
h'
V
Figure 23. Lift and drag characteristics of electrodynamic suspension systems (cryogenic). (a) Drag
force FDas a function of speed, (b) lift and transverse force on a coil near the edge of a
conducting plate. (Reproduced by permission of the IEEE.)
The important parameters which characterise the suspension are lift and guidance
forces per unit magnet weight and the FL/FD ratio. Leaving aside the problem of guidance, calculations have been carried out (Reitz 1970, Reitz and Davis 1972) for rectangular coils moving with a velocity v above a conducting plate of arbitrary thickness and
infinite extent. An analytical fit to the calculations, if the plate thickness T< 6, where 6
is the skin depth of penetration and the permeability of the plate material p=po, i.e.
non-magnetic, is
FL=FI[I -(I - ~ ~ / w ~ ) - ~ ]
(4.1)
and (Davis 1972, Reitz et a1 1972)
FD= ( w / u )FL
where
w = 2/poa T.
w has the dimensions of velocity and a is the conductivity. The number n is determined
by the dimensions of the coil. Equation (4.2) is an exact result. For the coil of figure
22(b), i.e. 0.5 m x 3 m (3 m side parallel to ti), n is approximately equal to 0.2 and for
aluminium plate I in (2.5 cm) thick w=6300 m h-1 (3.9 mile h-1). If the conducting
plate is thick eddy currents are limited by skin depth 6 and in equation (4.3) the value
of w is obtained by substituting 6 for T where 6=yeff/(rpoati)1/2 and yeff is the effective
wavelength for the geometry under consideration (Reitz et al 1972). For a wide rectangular coil moving perpendicular to its length at a height h small compared to its width,
yeff=16h. For a narrow coil, long side 2b, parallel to v, yeff=+n'b. For plates of
intermediate thickness FL and FD have been determined numerically using Fourier
methods. In general, it is found that increasing the levitation height and the length of
the coil in the direction of motion improves the ratio FL/FDbut increasing the levitation
height beyond 30 cm is not considered practical as the lift force diminishes. Figure 22(a)
shows calculated and experimental values (Reitz 1970, Borcherts and Davis 1973) of
FL and FLIFD for two coils, 2.12 cm and 4.67 cm, at a suspension height of 4.22 cm over
a thick aluminium plate. The experimental results were obtained by suspending the
superconducting coils over the rim of a rotating aluminium wheel 61 cm diameter x 15.2
cm width. The lift force on a 0.5 m x 3 m coil at a suspension height of 0.3 m and FL/FD
Electromagnetic suspension and levitation
44 1
are shown in figure 22(b). The drag force is shown in figure 23(a). Four such coils would
support a 50 ton vehicle travelling at v=483 km h-1 (300 mile h-1).
The guideway plate acts very much like a ‘thin’ plate up to 160 km h-l(lO0 mile h-1).
In this range it can be observed that FL/FDis almost linearly proportional to speed and
is essentially the same as that given by the thin plate analysis (broken line in figure 22(b)).
The eddy current distribution above 160 km h-1 is not uniform but is now limited by
considerations of skin depth 6 which is approximately 2 cm at 483 km h-1. The difference
between the FLIFD predicted by thin plate theory and the actual one is seen in figure
22(b) to be almost 25% at 483 km h-1. Whilst theoretical calculations are based on
rectangular geometry for the coil, in actual practice the corners will be rounded. This,
however, does not have a significant effect on either FL or FD.
There is in general a transverse force on the magnet if the guideway conducting plate
is of finite width and the force is such as to push the magnet off the plate. Calculations
and experiments show (Borcherts and Davis 1973) that if the track width exceeds the
magnet width by about twice the levitation height the degradation in lift from that over
an infinite plate is very small. The results from a 0.5 m x 3 m coil for the lift force FL
and transverse force FT for height above conducting plate h=0.3 m by Borcherts and
Davis (1973) are shown in figure 23(b). If the distance of the coil from the edge of the
plate h’ exceeds the suspension gap h, FT is small and FL is essentially the same as for an
infinite plate. Since the drag force scales roughly with the sum of FL and FT, the lift to
drag ratio is degraded by about 10% if the track width exceeds the magnet width by
only 2h.
It is necessary to have additional levitation surfaces in the guideway in order to
provide transverse guidance forces for a suspended vehicle. The surfaces are preferably
vertical ones and the vehicle can either have separate guidance magnets to operate against
these surfaces or the main levitation magnets can operate in a dual role and provide
guidance against the vertical sections of the guideway. The guidance force FG generated
by the lift magnet constituted by the same 0.5 m x 3 m coil at levitation height of h=0.3 m
is shown in figure 24. In either case the guidance force produces extra drag which degrades
the overall suspension performance criterion given by FL/FDsince
FD= ( v / w )(FL+ FG).
(4 4)
4.2.3.2. Cryogenic magnet design and cryogenic magnet requirements. The design of a
magnetically levitated vehicle utilising superconducting magnets is crucially dependent
upon a good magnet design which will transmit forces safely from the superconducting
magnet elements, keeping the heat losses low and yet with minimum distance between
the bottom of the Dewar and the superconducting wires.
The basic features of a cryogenic system for a vehicle operating in a U-channel
guideway as suggested by Borcherts and Davis (1973) are shown in figure 25. There are
eight magnets, four for lift and four for guidance. This is not necessarily an optimum
number. The lift and guidance pair are as shown in the figure at one of the corners and
the arrangement allows a certain degree of redundancy, and hence safety, to be built into
the system. The fringing field of the lift magnet can provide guidance in case of the
failure of the guidance magnet and vice versa. In the example of the 0.5 m x 3 m coil
with 3.6 x 105 A turns the magnet and the Dewar assembly would weigh approximately
600 kg and hence give a lift to weight ratio of nearly 20. In order to transmit the lift and
guidance forces from the magnet at 4 K to the frame at 300 K some composite material
such as epoxy fibre glass with very low specific conductivity but high tensile as well as
compressive and fatigue strength must be used. Using layers of metallic reflectors to
442
B V Jayawant
_L
03m
T
c
0
\
2
4
6
h lm)
Figure 24. Lift and guidance force on a coil near a conductor shaped as a right angle corner. (Reproduced
by permission of the IEEE.)
/
Vacuum
and
superinsulation
Section through
Lift magnet
Figure25. Basic features of a cryogenic suspension and guidance scheme operating in a U-shaped
channel. (Reproduced by permission of the IEEE.)
443
Electromagnetic suspension and levitation
keep the radiation losses to a minimum, alternating with insulation spacers, the conduction and the radiant heat energy transmitted from 77 K to the magnet is 1 W for each.
A major source of heat leak into the cryostat is through the leads carrying the current
in and out of the superconducting wires. For a well-designed pair of leads this would be
approximately less than 2 W per 1000 A pair since the vehicle magnets are by no means
large by present superconducting magnet standards. If the magnets are operated in the
persistent mode these losses would be even further reduced. Typical figures of heat load
to the 4 K cryostat would be less than 3 W per magnet or less than 24
per vehicle.
There would in addition be AC losses in the superconducting windings due to the oscillatory motion of the magnets of the order of 1-10 W per magnet for the typical 10-12 pm
diameter filaments in a multifilament niobium-titanium composite (Reitz et a1 1972).
The 4 K refrigeration for these magnets could come from on-board lightweight cryogenic
refrigerators although such units have not yet been fully developed. The 77 K or the
intermediate temperature refrigeration could be achieved by either liquid nitrogen, or
the heat capacity in the boiled-off helium or an intermediate temperature point on the
on-board refrigerator, although this would increase the size of the refrigerator.
4.2.4. Acceleration, braking and propulsion aspects of superconducting systems. The drag
force on a magnet moving at constant height above a conducting track exhibits a peak
(figure 23(a)) in the speed range 8-16 km h-1 (5-10 mile h-1) depending upon coil
geometry and the thickness of the conducting track. At high speeds the drag falls off
inversely as the speed, i.e. if the vehicle remains on wheels up to some lift-off speed 00,
the magnetic drag on the vehicle is similar in shape to figure 23 (a)provided 00 > 80 km h-l
and the magnets remain at constant height for v < UO. For a 50 ton vehicle the estimated
magnitude of the low-speed drag peak is 8.9 x 104 N (20 000 Ib) inclusive of the drag
associated with the guidance magnets (approximately half of the lift forces). The total
drag force on such a vehicle due to both aerodynamic and electromagnetic forces is
shown in figure 26. This force is calculated on the assumption that the vehicle is entirely
\
1
1
I
I
I
0
103
200
300
LOO
1
183 k m h"
V
Figure 26. Propulsive force requirements to overcome magnetic and aerodynamic drag as a function
of speed. (Reproduced by permission of the IEEE.)
28
444
B VJayawant
levitated. The aerodynamic drag is proportional to v 2 and at 483 km h-1 is estimated
(Reitz et a1 1972) to be 2.7 x 104 N (6000 Ib). Two cases are illustrated in figure 26, one
= 80 at 483 km h-1. For the
for F L l F D = 40 at 483 km h-1 and the second one for FLIFD
the magnetic drag at 483 km h-1 is approximately 1.5 MW and the
case of FL/FD=~O
aerodynamic drag is 3.5 MW giving a total of nearly 5 MW. The magnetic drag at
80 km h-1 for this case, however, is 6.7 x 104 N (15 000 Ib). It would thus appear that the
drag is appreciable over the entire speed range. There will, therefore, be considerable
problems in accelerating the vehicle through this drag peak with a thrust-limited engine
such as a linear induction motor.
A possibility is to look at ways of reducing the drag peak. Methods suggested for
reducing or eliminating the low-speed drag are (i) not to operate the magnets in a persistent mode but to reduce the current during acceleration. The magnet coils, however,
will possess substantial inductance and it could take as much as 10 s to bring the current
up to full value. It would also introduce some additional cryogenic losses. (ii) Conductor
to be left out of the initial section of the guideway and in order to avoid an abrupt increase
in the drag force the conducting track to be brought up to the wheel level gradually from
below. (iii) By tapering the aluminium plate in the track although the drag peak cannot
be avoided this way. However, the vehicle can pass through the drag barrier of a tapered
section if it has sufficient velocity. Thus the vehicle could be accelerated to 80 km h-1 at
first in a guideway without a metal plate, then, with a section having tapered plate
limited to 15-30 m in length, the reduction in speed in passing through the drag peak will
be only 1.5-3 km h-1. (iv) The vehicle is fitted with wheels which maintain the magnets
at a height greater than the operating gap. All the electromagnetic forces including the
drag peak are thus reduced. When the vehicle reaches a speed substantially above the
lift-off or the drag peak speed the wheels are retracted. Although this scheme adds the
mechanical complexity of retractable wheels it has the advantage of being able to operate
anywhere on the guideway so long as provision is made for wheeltracks. (v) A refinement
of the superconducting guideway proposed by Powell and Danby is known as the
‘null flux’ method. Two opposing guideway loops are arranged flanking a single coil on
the vehicle or two vehicle loops are arranged flanking a single guideway loop (figure 27).
This results in an extremely high field gradient and a significant reduction in drag. A null
flux system not only provides a high lift to drag ratio but also strong restoring forces. The
suspension stiffness, in fact, is so high that guideway alignment might become critical and
the ride uncomfortable without secondary suspension. The secondary suspension might
add considerable weight and create additional aerodynamic drag and could thus cancel
out much of the advantage. Based on the magnetic and aerodynamic drag calculations
estimates of peak acceleration range from 0.17-0.3 g depending on the coil geometry and
VO. Peak deceleration is reduced by either increasing vo or by increasing the lengthlwidth
ratio of the coils. Increasing the thickness of the conductor in the guideway is equivalent
to increasing vo since it is V O / W which is important. TACV specifications of normal deceleration not exceeding 0.15 g and emergency deceleration of not more than 0.3 g can,
therefore, clearly be met.
4.2.4.1. Linear synchronous motors with superconducting magnets. There is a common
belief that a linear induction motor with the primary on the vehicle is the only possible
means of propulsion unit viable for advanced ground transportation. In the case of
vehicles levitated by superconducting magnets the problems of the drag peak and operation at airgaps of the order of 0.1-0.3 m pose a serious question mark against the linear
induction motor. The linear synchronous motor was at first ignored because of the
Electromagnetic suspension and levitation
445
Train body
Train superccnducting
loop
Figure 27. Null flux suspension proposed by Powell and Danby (1966).
requirement of synchronisation between the speed of operation and the frequency of its
supply. It was also assumed that the track structure, particularly the long stator, i.e. a
wound track fed from inverters, would be prohibitively expensive. The advent of superconductivity and advances in inverter technology have changed the situation so completely that the linear synchronous motor may now be the key to propulsion at high
speeds. The superconducting levitation magnets provide fields that are not only intense
but of large volume so that they can be coupled efficiently to fixed stator windings wound
directly in the guideway with no iron, even at clearances of the order of 0.1-0.3 m. The
increase in the rotor current, i.e. the on-board superconducting magnets, opens up the
way to a reduction in the stator currents and so to simpler and less costly stator structures
than possible hitherto. As to variable frequency inverters or converters the recent
advances in power transistor technology have opened up the possibilities of light, compact, efficient and also reliable variable frequency sources alongside the track. The higher
the superconducting coil currents the lower the track currents with correspondingly high
efficiencies. Typical cruise efficiencies are of the order of 80 % depending on the length
of the superconducting loops, the amount of current carried and the length of the
energised track. If the currents in the superconducting coils are as large as 3-5 x 105 A
track currents may be as low as 1000-1500 A and a thrust in excess of 8.9 x 104 N (20 000
lb) appears feasible for clearances of 0.1 m.
4.2.5. Current activity in superconducting levitation. The two most advanced developments, currently, are those of the Japanese National Railways (JNR) and the Canadian
Institute of Guided Ground Transport (CIGGT). As indicated in $2.3 JNR have built
two vehicles so far (Yamamura 1976). The first vehicle was 7 m long, 2.5 m wide, 2.2 m
28*
B V Jayawant
446
high and weighed 3.5 tons. It was propelled by a linear induction motor which had its
primary on the track and secondary on the vehicle. The track was only 480 m long and
hence the maximum speed achieved was limited to 65 km h-1. The clearance at this speed
was 6 cm and lateral guidance was provided by wheels operating against side rails.
The second JNR vehicle illustrated in figure 3 is being tested on a much longer track
of 20 km and was finished in 1978. Therefore, it is a little too early to obtain any published results for its operation. It is 10 m long, 3.8 m wide, 2.7 m high and weighs 10 tons.
The lifting superconducting magnets have 1.5 x IO5 A turns each and are installed horizontally on the vehicle. The secondaries are aluminium coils on the guideway and the
configuration adopted is in the form of a ladder track. The lifting magnets act in the
‘normal flux’ mode. Another set of superconducting magnets, each with 4 x lo5 A turns,
is installed vertically on the vehicle and this set of magnets produces thrust and guidance
forces acting on vertical coils attached to the guideway. The guidance magnets act in the
‘null flux’ mode. The vertical coils are also the primary of the linear synchronous motor
and are energised by a cycloconverter in the frequency range 0-33.3 Hz. Synchronisation
of the LSM is maintained by optical means.
Studies and some experimental work are in progress in Canada (CIGGT) into electrodynamic levitation and linear synchronous motor propulsion (Eastham 1975). The
experimental work consists mainly of a wheel 7.6 m (25 ft) in diameter rotating about a
vertical axis at peripheral speeds up to 101 km h-1 (63 mile h-1) driven by a 1750 RPM
120 kW variable speed DC motor through a 25 : 1 reduction gearbox. Guideway components can be attached to the vertical rim while vehicle-borne components are mounted
in a stationary harness and six component balances are used for positional adjustment and
for the measurement of forces and torques.
The Canadian investigation is aimed at developing vehicles with linear synchronous
motor propulsion and guidance for 480 km h-1 intercity transit along the TorontoOttawa-Montreal corridor for the 1990s. The vehicles are intended to carry 100passengers,
weighing 30 tons and levitated with 15 cm clearance by eight vehicle-borne superconduct320
Automatic [ow
speed steering
Retractable wheels
Aluminium guideway
surf nce
Secondary
suspension
-
repulsion magn-Guldance
0 20
0
SY
c011s
windings
100 cm
1f t
U
Figure 28. A schematic cross section of the proposed Canadian vehicle using superconducting levitation
and guidance. All dimensions are in cm. (Reproduced by permission of the CIGGT.)
Electromagnetic suspension and levitation
447
ing magnets (Eastham 1975, Eastham and Atherton 1975). The lift magnets are 1.0 m
long x 0.3 m wide with 3.85 x 105 A turns interacting with eddy currents induced in 80 cm
wide aluminium strips on a flat-topped guideway. The aluminium strip is graded from
1 cm at high-speed to 3 cm at low-speed sections to maintain the total drag (magnetic and
aerodynamic) almost independent of speed whilst minimising the combined costs of energy
requirements and aluminium amortisation. For the synchronous propulsion system the
vehicle is supposed to carry 50 superconducting magnets each 0.4 m long x 1.5 m wide and
the guideway is to have split three-phase windings energised by variable frequency current
source inverters in 5 km sections to give 72 % efficiency and 0.73 power factor. The thrust
force is controlled by sensing the phase angle between supply current and the guideway
windings, thus minimising the inverter rating and introducing the possibility of dynamic
control of the vehicle.
A flat-topped guideway is proposed to minimise ice and snow accumulation and a
new technique is proposed for obtaining lateral guidance by using interaction of the 50
propulsion magnets with the edges of the levitation strips and with null flux loops overlaying the LSM windings. The stiffness expected to be obtained is lo6 N m-l. The outline
of the proposed vehicles is shown in figure 28.
5. Levitation using eddy currents induced by mains frequency excitation
Conducting materials in solid and liquid states can be levitated above AC coil systems.
The levitation of solid plates (Laithwaite 1965) or rings has been used as a laboratory or
lecture demonstration. The levitation of molten metal for zone refining (Orkress et a2
1952) dates back to the early 1950s when there was considerable activity in the general
area of induction machines. The notion that this form of levitation could be applied to
passenger carrying vehicles appears to have originated towards the end of the 1960s or
early 1970s (Laithwaite et a1 1971, Eastham and Laithwaite 1974, Laithwaite 1973a) as a
result of several years of study related to the use of linear induction motors as propulsion
units for high-speed vehicles (Barwell and Laithwaite 1967, Chirgwin 1974). The idea
that linear induction motors could be used not only to propel passenger carrying vehicles
but to levitate them as well gained considerable attention and popularity in the mid1970s. The idea became known as the ‘magnetic river’.
A single-sided linear induction motor can be designed to produce large levitation
forces in addition to its normal translational or tractive force. As the speed of the linear
motor with respect to a composite reaction plate, consisting of conducting material
backed by permeable material such as steel, increases, the force of repulsion becomes a
force of attraction in normal design. The concept of magnetic rivers revolves around
the objective of the design of a single-sided linear motor which could combine the functions of propulsion, levitation and guidance. Furthermore, in such a motor the force of
repulsion would remain constant up to running speed with little or no additional input.
5.1. Some stable and unstable AC induction levitators
The study of AC levitation is closely linked with that of induction machines. For example,
the lifting force on a conducting sheet over the surface of a single-sided linear motor can
be calculated (West and Hesmondhalgh 1962) provided the equations for the flux density
b and the current density j at all points can be found. However, in most practical levitation systems the equations either cannot be formulated or are so formidable that solu-
448
B V Juyawant
tions are virtually impracticable. A qualitative appreciation based on an experimental
approach is likely to be more fruitful.
A jumping ring experiment (figure 29) is an example of forces of repulsion between
two current-carrying loops threaded by an open magnetic core. The geometry lends itself
to fairly accurate calculations of force if the leakage flux is assumed to decay exponentially (West and Jayawant 1962). Until recently, when an application was proposed for
this in the aluminium smelting process for stirring molten metal (Bamji 1974), this experiment was not much more than a good lecture demonstration.
If the iron core in figure 29 is sufficiently long and the ring allowed to take up a
steady-state position as shown in the figure, it will be found that the ring will always be
in contact with the core somewhere along its perimeter. The ring cannot, therefore, be
considered as levitated stably since it is restrained by the core. The link between the
study of conventional motors and their driving forces on the one hand and the study of
levitation using AC and lift forces on the other is provided to some extent by the shaded
Figure 29. Jumping ring experiment.
pole motors (Laithwaite 1965). In such motors the phase changes produced by the
shading ring are capable of producing force on the ring itself. The transition from a
conventional three-phase induction motor to a circular plate levitator through a shaded
pole motor and a ring levitator (Laithwaite 1965, 1966) is shown in figure 30. Starting
with a conventional three-phase motor in (a) in which the phase progression of the airgap
flux along the perimeter of the rotor is dictated by the voltages to which the stator
windings are connected, the first step is to replace the polyphase winding by a single-phase
winding with shading ring(s) on the poles (b). Next the rotor conductors are replaced
by a continuous cylinder and the machine unrolled into a linear machine (c). It is then
rerolled about the axis AB ( d ) with the stator winding on the inside. The thrust is now
such as to push the conducting cylinder out of the stator. The motor is then turned
through 90" so that the force on the cylinder is now vertically upwards. The length of
the machine is now cut down so that the number of windings and the shading rings is
reduced to the minimum (f).The next step shown in (g) is the important one of using the
shading ring to produce a force on itself. The jumping ring geometry is one in which
the outer iron cylinder is removed. The action is still one of a travelling field moving
up the annular slot. The flux fringes above the slot opening and thus the action does not
Electromagnetic suspension and levitation
(91
449
ih)
Figure 30. Topological steps from a three-phase squirrel-cage motor to a levitation system. ( U ) Conventional rotary machine, (b) shaded pole rotary machine, (c) shaded pole drag cup machine,
( d ) linear shaded pole motor with sheet rotor, ( e ) tubular shaded pole motor with axial flux,
(f) single coil tubular shaded pole motor, (g) elementary levitator, (h) circular plate levitator.
(Reproduced by permission of the IEE.)
stop abruptly there. Also, therefore, phase changes of current and flux occur in the parts
of the cup outside the slot. Currents circulate around the rim of the cup and ideally there
are no currents in any other axis. The cylindrical rim of the cup is now removed leaving
a circular conducting ring, the hollow part of which may now be filled (A), thus completing
the transition to a circular plate levitator. The currents which circulate around the lower
part of the periphery in position P are in phase advance over those circulating around the
upper part in position Q, and the lifting force may be attributed to a travelling field
pattern travelling upwards and operating on the plate in the manner of an induction
motor. It is relatively simple to show that the system is unstable. As soon as the plate is
displaced slightly from the central axis (figure 31) the forces originating from the pole
shading action will be greater on the overhanging side than on the other and the plate
will be thrown off the coil-core face. The reason for the disc being thrown off may also
be attributed to the presence of the plate producing radially outward travelling fields.
Stability in principle could be achieved using a number of concentric circular coils each
connected to voltages of different phase and thus producing fields travelling radially
inwards. In practice, two such coils have been found sufficient to produce stability. The
core may be made up of radial laminations, the tapered form achieved by staggering them
radially (figure 32(a)). More conveniently it could be made into blocks as shown in
figure 32(b). Stable suspensions can be obtained for a range of plate diameters between
the outer diameter of the inner exciting coil and the inner diameter of the outer exciting
coil. The conditions of stability vary widely with the diameters, even within this range.
Plates of diameters less than the outer coil diameter can be suspended stably with their
450
B V Jayawant
Figure 31. Horizontal forces produced by a circular plate levitator. (a) Plate concentric, (b) plate
eccentric. (Reproduced by permission of the IEE.)
centres displaced away from the centre of the coil. The plate is then also capable of being
spun as if it were inside an invisible tube of a larger diameter than that of the plate itself.
The principal design dimensions given by Laithwaite (1966) for a circular plate levitator
are height 53 in, overall diameter 8 in with the lamination width 3 in; the number of
turns on the inner coil 480 and the number of turns on the outer coil 440 of 15 SWG
enamelled copper wire.
The height of the plate above the coil for any particular value of the inner coil current
does not vary a great deal when the outer coil current is in the range where the levitated
plate is stable. The formula given by Laithwaite (1966), based on the assumption that
for a given height the upward force on the plate is proportional to the square of the
primary current, is lift at height h is proportional to l/(h+6)4 where 6 is a constant
current necessary to obtain the correct value of the lift at h=O. The inner coil may be
regarded as the lifting coil whereas the outer coil is the stabilising coil. Most of the
losses in the plate are, therefore, supplied through the inner coil. The power input
-Laminated
Stator winding
core
Rotor conductor
Ib)
Figure 32. Configuration for disc levitators. (a) Ideal arrangement of coils and laminations, (6) practical
arrangement of coils and laminations. (Reproduced by permission of the IEE.)
Electromagnetic suspension and levitation
451
depends on various factors such as disc thickness, slot dimensions, etc, but for a fixed
configuration such as the one for which principal dimensions are given above, the power
dissipated in the disc is a linear function of the height above the stator core. Again the
formula for the power loss is given (Laithwaite 1966) as P ~ = k l + k z h ;the constants
kl and kz can be measured in terms of the mass of the material to be lifted. For copper
these are quoted as k l = 27, k2 = 36, h measured in cm and P D in watts. For aluminium
these are kl = 52 and k2 = 52 for the same structure. The total power input is obtained
by adding the stator Z2R loss and the core loss to PD. The Z2R loss increases as the
fourth power of the height of levitation of the plate h.
5.1.1. Rectangular plates. The linear equivalent of the circular plate levitator, i.e. the
one used to levitate rectangular plates, is an extension of the ideas involved in the pre-
Figure 33. Evolution of a plate levitator from a disc levitator. (Reproduced by permission of the IEE.)
vious subsection. Figure 33 shows this evolution. The behaviour of the arrangement of
figure 33(a) is very little different from that of a truly circular one. In figure 33(b) the
number of blocks is reduced to four and a square plate of appropriate size can be supported with this arrangement. There are only two energising coils in this arrangement
so that the same currents flow through the slots of the four blocks. If the currents in
each slot were returned beneath the individual blocks in the manner of a Gramme ring
winding (figure 33(c)) currents in the eight slots could be controlled independently, thus
making the stability and the attitude of the plate in each of the two directions x-x'
and y - y ' also independent.
The last step of this evolution is that of figure 33(d) in which Iul= Iu2=Iu3= Iu4= 0
and the blocks carrying currents along the x direction have been elongated. If the system
is found to be stable for Izl= Izz=Iz3 = Iz4 with the directions of currents shown the
arrangement of figure 33(e) is identical but with the advantage that the two blocks are
452
B V Jayawant
now self-contained and can be moved closer or further apart to accommodate plates of
different widths. Just as there is no resistance to the motion of a spinning disc, there is
no resistance to the motion of the plate along the x-x’ direction apart from any
irregularities of construction.
5.1.2. Levitation of spheres and cyliizders. Stable levitation of bodies with spherical
symmetry is generally more easily obtained than with flat plates. The construction of a
sphere levitator at power frequencies is basically the same as in the case of discs. It consists of two concentric coils in an iron structure and the inner coil can often be shorted
out, thereby acting as a shorted ring instead of being fed from an external power source.
Figure 34 shows (Laithwaite 1966) the construction of a levitator in which the hollow
aluminium sphere of wall thickness &in is levitated by a single coil which encloses a
thick copper cylinder as a shading ring with a split iron cylinder separating the two. If
thicker material, for example & in wall thickness, is used for the sphere it may become
E x i i ting coil
Figure 34. Levitation of a sphere using a shading ring stabiliser. (Reproduced by permission of the IEE.)
oscillatory about a horizontal axis, finally electing to spin in one direction. The dynamic
impedance of the moving conductor then so changes the flux phase pattern that the
sphere drifts from the centre and is finally ejected. This occurs in such a direction that
the sphere appears to roll out of the field along an invisible horizontal plane.
Support of cylinders by elongated coil systems is also possible. Spheres and cylinders
behave in an analogous manner as do discs and rectangular plates as far as unresisted
motion is concerned. A cylinder can be supported simply by a pair of long conductors
spaced horizontally and carrying high-frequency currents in opposite directions. Again
the single circular coil used to support spheres is analogous.
The techniques used in power frequency levitators are often useful in high-frequency
systems. The use of iron in power frequency levitators is the same as in any conventional
machine, i.e. to improve the magnetic circuits and thereby leading to a substantial reduction in P R losses. It is now possible to extend the range of frequencies by the use of
ferrites which have improved quite considerably. The second way in which power
frequency techniques are useful to the design of high-frequency systems is in the form of
Electromagnetic suspension and levitation
453
construction. Highly rated coils or conductors such as water-cooled tubes in the same
position as conductors in the slots of figure 32 can be used as an alternative to the conical
coils of figure 4 which have been adopted in America. Finally the travelling field concept
of power engineers is useful in deducing the best techniques for controlling the temperature of the suspended body. For a given configuration the pole pitch along one diameter,
say, is fixed and increased frequencies will increase the velocity of the travelling field.
This in turn will increase the power input to the supported member, thus indicating that
the temperature of the levitated member and the input required to lift a given mass may
be controlled by varying the frequency. The power required to lift 1 lb of mass may be
made as low as 60 W although it must be borne in mind that the reactive power will still
be quite substantial due to an inherently poor magnetic circuit for the primary.
High-frequency levitation work is mainly concerned with supporting molten metal,
and laboratory pieces of equipment to achieve this are available. These are used for zone
refining and as it is achieved by a completely non-contacting method, i.e. without a
crucible, it is claimed that this leads to an extremely high degree of purity. The method
generally appears to be suitable (Orkress et al 1952, Polonis et al 1954, Schreibe 1953,
Weisberg 1959) for application to rather small masses of non-ferrous molten metal,
although Schreibe (1953) claims to have suspended 8 kg of molten steel. The coil arrangement of one such piece of equipment is shown in figure 4. The conductors are copper
tubes, water-cooled, and thus highly rated and the frequencies used are of the order of
10 kHz. Orkress et a1 (1952) have attempted an analysis of this configuration by breaking
down the system into single circular loops and calculating the axial force between each
loop and a solid sphere placed on the axis of the loop. It is assumed that for a sphere
placed in a uniform sinusoidally time varying field, not of a high frequency, the field due
to the induced eddy currents is equivalent to that of a magnetic dipole alternating in
time with the field, which has a phase and amplitude depending on the strength of the
generating field, the radius of the sphere, its permeability and conductivity. The net
force on the sphere is zero. If the field is now non-uniform in space, the force on the
sphere may be calculated by replacing it by a dipole whose moment is calculated as
before in terms of a field whose properties are those of the field which exists at the
centre of the sphere. Although this method is only approximate the amount of detail
in the resulting formulae is considerable.
The coils shown in figure 4 consist of tubular conductors so that water may be circulated in them. With currents of the order of 800 A at 9.6 kHz, 3 lb of bronze could be
supported. It is estimated that about 50 kV A would be needed to support a few pounds
of metal.
5.2. Levitation of passenger carrying vehicles, or the magnetic river
There are some fundamental differences between levitation of rectangular plates as
described in 95 and single-sided linear motors acting against sheet secondaries with steel
backing. The name, magnetic river, is intended to emphasise the behaviour of moving
magnetic fields as being analogous to a viscous fluid in cases where rectangular plates
levitated by one AC coil system are propelled by the same system. The moving magnetic
field is regarded as a channel containing a flowing liquid into which objects can be dropped
which thereafter are accelerated by the liquid and which, if unrestrained, soon attain the
same speed as that of the liquid. If a piece of wood floats in the liquid stream or ‘river’
and is caused to pull a mechanical load on wheels along the banks of the river as shown
in figure 35 some water slips past the wooden block and the latter fails to reach the river
454
B V Jayawant
w
_----
- --- -
A - - - -
--vs
V
__c
A
n
/
"5
IS1
Figure 35. Magnetic river analogy of linear induction motor. Wooden block W in (a) is replaced by a
piece of conducting material A in (b). (Reproduced by permission of the IEE.)
speed us. Instead, the load and the block will travel at some other speed U and the entire
force produced by the river on the piece of wood is transferred to the load on the banks
via the connecting ropes.
There exists an analogy between the river and linear induction motors in which the
secondary member is repelled as well as propelled by the primary and in the case of a
machine in which the pole surface is horizontal, causes the secondary to 'float' as does
the wooden block in the river. It is possible to control the lateral, vertical, pitch and roll
motions of the floating secondary sheet so that it is maintained in a horizontal plane
within the confines of the 'electromagnetic river'. The sheet must be made stable in yaw
as well so that five degrees of freedom, viz heave, roll, pitch, yaw and lateral displacement,
are under control. The sixth degree of freedom is the linear motion along the stream or
the direction of the travelling magnetic field.
5.2.1. Linear induction motors as propulsion and levitation devices. It is important to
look at the limitations of linear motors which may be considered as the evolution of
rotary induction motors cut along the axis and rolled out flat. Machines of this kind
are called axial flux machines. The two essential elements of such machines, the magnetic
circuit and the electric circuit, are shown in figure 36. When considered for application
to high-speed transportation systems a long pole pitch is necessary, thereby stretching
both the electric and magnetic circuit paths. This leads to large overhangs, i.e. wasted
conductors on the windings and an increase in the depth of the core to carry the magnetic
flux. This increases the weight of the machine and makes it almost unacceptable for a
Electromagnetic suspension and levitation
s
455
Figure 36. Electric and magnetic planes related to the direction of motion. (a) The axial flux machine,
(b) the transverse flux concept. (Reproduced by permission of the IEE.)
transportation vehicle. Furthermore an axial flux motor virtually cannot be used as a
single-sided machine acting against a reaction plate with backing steel (figure 37(a))
without encountering considerable forces of attraction. These forces might almost
double the weight of the levitated vehicle. Such forces of attraction are also present in
conventional rotary machines but if the airgap is uniform around the periphery of the
rotor these forces are self-cancelling. If not these result in an unbalanced magnetic pull
(UMP) and is taken up by the shaft bearings.
These fundamental objections to axial flux motors in transport applications can be
overcome by using a geometry called transverse flux machines (Laithwaite et a1 1971)
(TFM) shown in figure 37. It can be seen from figure 37(b) that due to the pattern of the
Vehicle
( D r i m o r y A
Direction
of motion
Roil
kecondorv
\
Figure 37. Comparison of flux paths, relative thickness and rails for linear motor geometries. (a) Axial
flux, (6) transverse flux. (Reproduced by permission of the IEE.)
B V Jayawant
456
flux in the core of the machine and the reaction rail, which would normally be the track
member, the thickness of the cores of both the primary and secondary would be dramatically reduced. The principal advantage of the TFM,however, becomes apparent when the
equation for UMP is examined, particularly in relation to an electromagnetic arrangement
where the goodness factor G (Laithwaite 1966) is high and equal and opposite currents
face each other across the airgap. The expression normally used for calculating the
unbalanced magnetic pull is B2/2p0 and although incomplete, it is good enough in most
cases of rotary machines because the force of repulsion between the opposite currents is
less than 10% of the force of attraction between the magnetised surfaces. The full
equation for the normal component of unbalanced magnetic pull is (Eastham and Laithwaite 1974)
Fn=--B 2 poJ2
211.0
2
per unit area.
In a typical linear motor design evolved straight from its rotary counterpart the factor
B2/2p0 will still dominate. However, in a well-designed linear motor in which the slots
will be wide and the teeth narrow the current density J is increased and the flux density B
considerably reduced. Thus in equation (5.1) the two terms become much more comparable in magnitude. In fact, an increase of J by a factor of three and a reduction in B
by a factor of five will make the second term more dominant and the force will now be
of repulsion not attraction. When TFM are considered even greater lifting forces are
generated although both secondary and primary members contain iron cores and this
makes the design of combined lift, guidance and propulsion schemes feasible. During
the course of development of TFM aimed at power factor improvement and track cost
reduction it has been found that a primitive 'C' core TFM would levitate and stabilise any
conducting sheet of sufficient thickness and width at any height within an expanding
trough as shown in figure 38. The power fed to the primary determines the height of
levitation and the stability at such a height depends upon the sheet being made to fit
between the dotted lines. By analogy with the unbalanced magnetic pull in rotary
Figure 38. Expanding geometry for stable levitation. Current values are those required in the primary
coil to produce the same degree of stability at the heights shown. (Reproduced by permission
of the IEE.)
Electromagnetic suspension and levitation
457
machines the repulsion force available, mainly from TFM, is called unbalanced magnetic
push (Freeman and Laithwaite 1968). Further the UMP is of the order of 20 times greater
than the tangential or useful force and very little power, if any, is dissipated because
there is no vertical motion and, therefore, no mechanical output. The levitation force is,
thus, an unbalanced magnetic push exaggerated to its maximum by a single-sided arrangement and basically a force which does not require any power to levitate a mass. Whilst,
of course, this argument is true it does not take account of the fact that the higher the
support height, the lower will the power factor be due to secondary leakage reactance.
The reactive volt ampere requirement, which is in any case substantial, will be even
greater. On the other hand, it is said (Laithwaite 1977) that the bigger the machine the
larger will the induced eddy current effects be when the track member consists of aluminium backed up by steel. In very large vehicles such as those for carrying 300 passengers
travelling at over 300 mile h-1 and weighing 100-150 tons, this scheme was, therefore,
claimed to be superior to the controlled DC electromagnet system. Unfortunately this
has not subsequently been borne out in more detailed calculations and studies (Eastham
1978).
Early experiments showed that the normal force between the primary and secondary
of a flat motor could be tensile or compressive depending upon the value of the airgap
flux density B, and the stator surface current density J . But as the motor gained speed
lift forces were reduced and the tensile forces increased. It was also observed that the
front portion of the motor would exhibit a different normal force-speed characteristic
from the rear portion (Freeman and Lowther 1973) and this could give rise to pitch
instability. Such instability is aggravated by increase of the goodness factor G (defined
as G=p2puw/$prg). A large airgap g and a larger pole pitch p in order to maintain a
high value of G both work in favour of the concept of a magnetic river using TFM exploiting their short magnetic circuits. A model magnetic river experimental track 9 m long
capable of levitating aluminium plates has been demonstrated (Eastham and Balchin
1974) but it is not known whether the arrangement has subsequently been inverted as it
would have to be, i.e. the wound member would be on the vehicle and the track would be
an aluminium plate backed up by steel.
5.3. The magnetic river as a vehicle system
Eastham (1978) has calculated some theoretical boundaries of this system. He has
presented two designs based on programmes developed for previous work o n linear
induction motors (Freeman and Lowther 1973, Easthain and Balchin 1974). One of these
designs is for an airgap of 20 mm and the other is for a 100 mm airgap with a vehicle
weight (assumed) of 50 tons in both cases.
Motor weight
Synchronous capacitor weight
Corrected power factor
Peak efficiency
Weight remaining for payload
and body weight
20 mm
100 mm
11.2tons
19 tons
1 .o
0.38
19.8 tons
11.2tons
29.5 tons
1 .o
0.38
9.3 tons
The figures for operation at 100 mm gap, therefore, appear to leave very little margin
for payload. Eastham also casts doubts about the ability to operate the vehicles at 20 mm
458
B V Jayawant
gap without some form of feedback control and the ability to achieve the required current
densities without water-cooling of conductors and excessively large area required for the
motors. It is clear that whilst TFM hold considerable potential for straightforward
applications as propulsion units any proposals for the use of the magnetic river require
considerably more detailed studies involving the best available techniques to optimise
the design.
6. Suspension using controlled DC electromagnets
The extent of research and development in this technology and the current activity has
been indicated in 52.8. A significant feature of the technology of controlled DC electromagnet suspension is the potential of applications to frictionless bearings and contactless
suspensions. Both in vehicle applications and these energy requirements, elimination of
noise and reliability appear to be important features contributing to the success of this
method. Combinations of permanent magnets with controlled excitation also appear
technically feasible and might lead to a further reduction of energy requirement (theoretically to zero in steady state). Being essentially a position control system the work in this
area has made considerable contributions to the development of novel transducers and
power amplifiers. Arising from the control of multimagnet systems it has also contributed to the advancement of theoretical work in an extremely difficult area of nonlinear multivariable control systems. At the time of writing this review controlled DC
electromagnet schemes seem to hold considerable potential, as yet unexploited.
6.1. Principle of suspension using controlled
DC
electromagnets
A corollary of Earnshaw’s theorem and Braunbeck‘s subsequent work is that systems
using permanent magnets or electromagnets (AC or DC) without the control of current
are inherently unstable. In order, therefore, to achieve stable suspension it is necessary
to devise a means of regulating the current in an electromagnet using position feedback
of the object to be suspended. The effect of this is to modify the force-distance characteristics such that the current and thus the force of attraction decreases as the airgap
decreases and vice versa. A simple method of detecting changes in gap is the photooptical sensing method which is illustrated in figure 39(a). If the steel ball to be suspended in this case is attracted towards the magnet the amount of light falling on the
photocell (phototransistor) diminishes which in turn decreases the current and hence the
force acting against gravity. The force-distance characteristics are thus modified as
shown by the broken curve in figure 39(c). In order to use this method of suspension of
bodies such as vehicles the magnets and the amplifiers must be mounted on the moving
member (the vehicle) and the optical ‘transducer’ is replaced by something more appropriate to the application. The modifications required are shown in figure 39(b) where the
magnet is suspended below an inert steel rail and the transducer is called an ‘inductive
proximity transducer’. This is only one of the several types which may be used in this
application. Since the system is a closed loop position control system some form of
anticipation of position change is required in the feedback path. In the figure this is
shown as compensation. The simplest form of compensation is the derivative of the
position signal or phase-advance stabilisation but with more complex and multimagnet
systems other forms of compensation as well as transducers are required for adequate
Electromagnetic suspension and leaitation
459
-a Electromagnet
,
(Cl)
COlI
(b)
Reactlor
inductive proximity
, ,/-deiector
Compensation
amplifier
power
IC1
/'Closed loop
L L
Open loop
L'
A'rgap
-
Figure 39. Principles of single-magnet suspension. (a) Suspension with optical transducer, (b) suspension
of magnet under a steel rail, (c) open and closed loop characteristics.
stability. A laboratory demonstration model of a suspended steel ball is shown in
figure 40 (plate).
6.1.1. Nature of the controlproblem in a single-magnet suspension. The force of attraction
between magnetised bodies is given by
B2
Fm = - x area.
2P.o
In the case of electromagnets, such as those for suspension systems operating with an
airgap, the gap flux density is directly proportional to the ampere turns N I and inversely
proportional to the gap length. Therefore equation ( 6 . 1 ) can be rewritten as
It is obvious from this equation as well as the force-distance characteristics of figure
39(c) that the system is a highly non-linear position regulator. An adequate insight into
the nature of the control problem can, however, be gained by looking at a linearised model.
At the nominal required gap in figure 39(b) the magnet current io generates a force equal
to the weight to be suspended. Any displacement z from this position results in a change
i in the current. It is assumed in the first instance that the change in the force of attraction
is given by a linear function of the gap and current changes. The linearised equation is,
therefore,
f= -klz+kzi
(6 * 3)
for small changes about the equilibrium position where kl is the force per metre at constant current and k2 is the force per ampere at constant distance. The constants kl and
B V Juyawant
460
k2 can be determined experimentally for a given magnet. Thus
mi'= -f= - ( - k
IZ
+ k2i)
where m is the mass of the suspended body.
The relationship between the magnet current and voltage is
Ri+L
di
V.
dt
-=
In Laplace transform notation equations (6.4j and (6.5) become
(32
- kl/m) Z(s)=k2
- I(s)
m
and
The two equations combined together give
The quantity that can be directly controlled through a DC amplifier driving the magnet
is its voltage output and Tm represents the lag in the resulting current due largely to the
magnet inductance. The second term (9- kl/m),however, arises from the force-distance
characteristics which may be considered analogous to a spring stiffness constant but in
this case a negative one. The consequence of the negative spring stiffness characterised
by kl causes these systems to be inherently unstable. The explanation in control terminology is that the term (s2 - kl/m) represents poles at 5 (kl/m)l/2on the s plane and the
pole at + (k1/m)1/2contributes to the instability. In the closed loop or feedback systems
of figure 39 the transducers will have a very small time constant associated with it but
it is of very little practical significance here in comparison with the main time constants.
Because the compensation is in series with the transducer or the actuating signal and the
amplifier driving the magnet this scheme is known as series or cascade compensation.
A block schematic of the system is shown in figure 41.
Current
reference
I
Position
Power omp
lltsT,1-'
1im:
X
Airgop
I
Position transducer
Figure 41. Schematic of a general magnetic suspension with cascade compensation.
Electromagnetic suspension and levitation
46 1
6.1.2. Multimagnet systems. In multimagnet systems and particularly in transport
applications there are some departures from the single-magnet systems. By and large,
when providing maximum lift the magnet is operating in a highly non-linear part of its
force-distance characteristics. The control system gain is directly related to the slope
of the characteristics at the operating point. Therefore changes in the operating conditions
such as load variations will severely degrade the transient response or even cause
instability. Another important departure of the multimagnet systems arises from the
mechanical coupling of magnets mounted on a rigid chassis and that of the individual
control systems of the magnets. This demands an even higher degree of stability than
that obtainable from the cascade compensation scheme using position transducers alone.
There are several ways of overcoming or at least reducing the severity of the problem
of mechanical interaction, some of which are described in $6.2.1. There is, however,
some case for further improvements through the basic control system design. If a
transducer is introduced on the face of the lift magnets to measure gap flux density and
used in conjunction with a feedback control loop to control the magnet current in such
a manner that the gap flux density remains constant over the operating range of airgaps,
the non-linear force-distance characteristics will be very nearly linear. A primary cause
of instability will thus be eliminated, at least in the operating region, by the use of a
separate flux control loop. Although other transducers have variously been used the
author has used a Hall effect device mounted on the face of the magnets for the simple
reason that the output from a Hall plate is DC. The use of a flux control loop means that
the force is now independent of the gap length or that in equation (6.3) the constant
kl is zero. Alternatively this also means that in the s plane the pole in the right-hand
half at +(kl/m)l/z will have effectively moved to the origin. This partial linearisation
leaving the force variations proportional to i2 gives a dramatic improvement to the
stability margin of the multimagnet systems. Introduction of this loop to keep the airgap
density constant (for varying z) changes the open loop system equation (6.7) to
The scheme of using an independent feedback loop for one parameter, gap flux
density in this case, can be extended to the measurement of position and velocity independently and to using a separate loop for each. This concept of partial state feedback
gives control over gains of the individual loops and enables optimum setting for each.
The transducers employed for measurement and position are described later but the
measurement of acceleration and integrating the accelerometer signal to give velocity
has the advantage that the noise is attenuated in the process of integration. Obtaining
velocity from the position signal by taking its derivative or by differentiating it, on the
other hand, introduces a great deal of noise. In particular, if the position signal is
obtained by a process of rectification of an AC voltage the problem can be really acute.
A block schematic of a single-magnet system using separate position, velocity and flux
transducers is shown in figure 42.
An efficient suspension system employing DC electromagnets must of necessity operate
at relatively small airgaps as compared to, say, the superconducting levitation system.
The control of the airgap must, therefore, be very tight and for passenger carrying
vehicles this introduces conflicting requirements. Tight control of airgaps or a stiff
suspension will produce a hard and uncomfortable ride. It is, therefore, commonly
accepted that acceleration feedback is also necessary to achieve ride comfort.
462
B V Jayawant
Figure 42. Schematic of magnetic suspension with partial state feedback controller.
6.2. Analytical aspects of multimagnet systems
The problems of stabilising and extending the analysis of single-magnet systems to multimagnet systems are many and formidable. These are attributable in the main to the
inherent non-linearities in the control systems and to the mechanical cross coupling
between the magnets and their controllers all mounted on the same framework. For
example, the attitude of a vehicle chassis in free space is determined by three parameters:
heave, roll and pitch. If the chassis has four magnets, one at each corner, by specifying
and attempting to control four gaps to be the same introduces conflict between control
loops for each corner. This may be called ‘local control’. Alternatively, the measurement
of the airgaps at the four corners may be converted to give the attitude of the chassis
or the suspended body in terms of heave, roll and pitch and these are controlled instead
by associating a reference as well as compensation with each of them. This may be
termed ‘integrated control’. The concepts of ‘local’ and ‘integrated’ control are illustrated in figure 43. This figure illustrates the problem which is that multimagnet frames
are non-linear multivariable control systems and that the objectives are to achieve
decoupling by whatever means are practicable. These and various other aspects of the
control of magnetically suspended vehicles, such as the operation on flexible guideways,
have received a great deal of attention within the last decade (Linder 1976, Jayawant
et a1 1975,1976, Jayawant and Sinha 1977, Gottzein and Lange 1975, Gottzein et a1 1975,
1977, 1979, Nakamura 1979, Nakamura et a1 1979, Katz et aZl974, Popp and Schiehlen
1975, Meisinger 1975, 1977, Sinha 1977a, b). This work on vehicle dynamics is applicable
with only minor modifications to vehicles using any other method of levitation such as
superconducting magnetic levitation. Only a brief introductory outline of it is given
here.
6.2.1. Equations of motion and geometric transformations. A free body in space has six
degrees of freedom, three associated with translational motion, the other three with
rotation. Given information about all external forces acting on the body the principles
of linear and angular momentum lead to six non-linear differential equations. These
contain common factors giving rise to interaction between the variables.
Consider the suspended body to be represented by a uniform box-shaped object with
the centre of mass coincident with the centre of geometry (figure 44) and the frames of
Electromagnetic suspension and levitation
463
1
1 Rollstabilisation
-
4
4
4
Vehicle
-q
I1
.
p4
I(
/I
___(
,{
Stabilisation
Stabilisation
e
1
.-TiEmzFTl
reference and the principal axes as shown. The principle of linear momentum gives the
following equations (Hazlerigg 1974) :
mx=Fx
my=Fy
mi’=Fz
(6 9)
where Fx, Fy and Fz are the resultant forces acting along the inertial axes Ox, Oy and Oz,
4
Figure 44. Frame of reference and dimensions of quantities used in the equations of dynamics. OX,
propulsion axis; Oy, lateral guidance axis; 0 2 , heave axis; B, distance between centres of lift
along y axis; b, distance between position transducers along y axis; D, diagonal distance
between centres of lift ; d, diagonal distance between position transducers; L, distance between
centres of lift along x axis; 1, distance between position transducers along x axis.
29
B V Jayawant
464
The principle of angular momentum leads to three more equations for the rotational
coordinates. From Euler’s equations after substitution of appropriate Euler’s angles
+V z z -Iyy) w z
T y =I?/?/
6,+ (Ixx-Izz) w z
Tz Iz z CAz + (Ivy- Z x ) o x
Tx=L
U?/
X &
QJX
0y.
A suitable set of Euler’s angles is shown in figure 44 which corresponds to the notion
of rolling, pitching and yawing of the vehicle frame. In terms of these angles the angular
velocities are
w x = 9 ; + $ COS e
$ sin e cos y
oz=8 cos y + $ sin e sin g,
w Y = 8 sin y -
and
hx= ;p
+ ($e + {,id)
ij+- 89;y)
1); + (09 + 89;- $+y - $88).
dJy=d+($6y0-1);yLjz=
(6.10(a))
(6.W))
For small angular motions the terms in brackets may be neglected on the grounds of
smallness as compared to the principal terms d;, 8’ and 4, i.e. in comparison with the roll,
pitch and yaw accelerations. The resulting equations for angular motions and torques
become
Tx=IXx+(roll)
T, =I,,d (pitch)
Tz=I& (yaw). (6.1 l(a))
Tx, Tu and Tz are the applied moments of the external magnet forces. In practice, the
platform or the suspended frame may not be absolutely rigid and hence one more
equation describing the torsional motion of the suspended platform may be necessary
and a linearised version of this is
T~= I&
(6 * 11(b))
In practice the forces and torques in equations (6.9) and (6.11) are derived from a
system of electromagnets and the displacements and rotations are measured by a system
of transducers. Since the forces, torques, displacements and rotations are not measured
directly in the form in which they occur in equation (6.9)-(6.11) the magnets and transducer systems effectively introduce cross coupling. The four lift forces generated by the
four corner magnetsfl, f 2 , f3, are controlled by outputs pl, p z , p3, p4 from a set of four
transducers so as to maintain roll and pitch angles at zero and the height (of the vehicle)
constant. Then in figure 45
+f3 +A)
F z =+(fi +fi
(6.12(b))
Thus the platform (vehicle) can be regarded as a transformation between the magnet
forces and the transducer outputs and is in effect a four-input, four-output system.
Electromagnetic suspension and levitation
f?
-
--
Equation 16.12la))
f2
f3
f4
r,
T,
Equation 16.11(all
-
Ip
465
Equation (6.12 (611
e
P1
p2
-
-
z
62
--
P3
p4
i
Vehicle
Magnets
Transducers
Figure 45. Vehicle dynamics.
Change in any one of the forces will cause a response in all the output variables in view of
the cross coupling implied by equations (6.12). However, the essentially non-interacting
dynamics represented by equations (6.11) enables in principle each degree of freedom
‘p, 0 and z to be controlled independently by working with the appropriate linear combination of the Fi and pi (figure 43(a)). An alternative design procedure is to admit the
cross coupling implied in equations (6.12) and to attempt control based on a tight
association between a magnet and its nearest transducer, i.e. the forcefi is controlled by
the transducer pi. This leads to the control loop shown in figure 43(b). In this case the
disturbance entering any loop or applied to the mechanics in the form of external forces
will cause changes to all variables and will propagate throughout the system. It is
assumed in the analysis that all magnet-transducer pairs are identical, a state of affairs
seldom likely to be achieved in practice. There will, therefore, always be interactions
both static and dynamic in multimagnet vehicles. Furthermore, although complete static
non-interaction may just possibly be achieved, dynamic non-interaction under all
operating conditions is a virtual impossibility due to higher-order effects and also due to
the centre of mass being differently placed from the centre of geometry. This will, therefore, introduce coupling between various modes. In the realms of control theory it is
also possible to achieve decoupling by various state feedback decoupling methods. As
yet there are no reports of any group of workers having achieved any success through
these.
6.2.2. Decoupling through Jlexible chassis or magnet mountings. A somewhat simpler
alternative to schemes of dynamic decoupling by the use of state feedback methods is to
introduce flexibility in the vehicle chassis. The advantage of this method is that it does not
require any electronic circuitry other than that for individual magnet stabilisation. This
scheme was implemented by the author in one of the vehicles (figure 46). In this vehicle
Magnet
PIVOt
\
\
L -
Tension spring
I
\
1
/
-
I
I
\
r--Al---,
I
U
-
Spring Loaded
,
’
I
pivoted beam
Figure 46. Flexible suspension frame.
-
;
,
466
B V Jayawant
platform the magnets are mounted as a pair on beams which are pivoted about their
centres and coupled to the vehicle platform by means of springs of appropriate stiffness.
There is enormous improvement in the overall performance and stability of this arrangement. The same principle of a sprung chassis was incorporated in the General Motors
vehicle and in the Japan Air Lines vehicle HSST 02.
The concept of independent control of magnets and sprung chassis has been carried
even further on the German vehicles, Transrapid 04 and Transrapid 05 (figure 7). In
these vehicles the magnets are attached via a primary suspension to magnet frames which
are connected to the cabin by a secondary suspension. This structure adapts to guideway
irregularities even at high speeds and therefore a smaller airgap may be realised, leading
to a considerable reduction in magnet weight and power required for suspension. This
modularised structure carrying up to four magnets per frame has been termed the
‘magnet wheel’ (Gottzein and Cramer 1977).
6.3. Transducers, magnets and power amplifiers for magnetic suspension systems
The principal elements of a suspension system using controlled DC electromagnets, being
a part of a control system, are subject to criteria of dynamic performance in much the
same way as are components of any electromechanical control system. When the suspension system forms part of the vehicle-mounted equipment it is then subject to a
multitude of other criteria such as weight, power consumption, reliability and ruggedness
as well as safety requirements. Many of these requirements are mutually conflicting and
the process of optimisation is difficult. The amount of effort devoted to the development
of vehicles in the last decade has, however, been such that remarkable progress has been
made in the component field and a review of some of these is likely to prove useful.
Moreover the application of magnetic suspension to fields other than vehicle transportation is at least as important.
6.3.1. Transducers. In magnetic suspension systems transducers are required for the
measurement of position velocity and acceleration. In addition the flux control loop
described in $6.1.2 also requires a transducer to measure the gap flux density. Whilst
a wide variety of transducers appear to have been advocated only t&o distinct types now
seem to be in favour. All transducers need to be judged by some criteria and the following
are some of the important ones. In setting out these criteria it is worth noting that in a
control system the transducers operate outside the feedback loop. The accuracy of the
transducers cannot be improved by any compensation techniques and the control system
is at best only as good as the transducers in it.
(i) Bandwidth: this may be as large as 1000 rad s-1.
(ii) Robustness and stability under various operating conditions.
(iii) Linearity over the operating range.
(iv) Immunity from external noise, radiation and strong magnetic fields.
(v) Ability to operate without mechanical contact.
6.3.1.1. Optical. The simplest type of position transducer that can be used is the one
illustrated in figure 39. Either a filament type of light source or an infrared source can be
used. With this transducer the output is linear over a 2 mm range of movement and the
bandwidth is as high as 10 MHz. Very high stiffnesses of suspension and precision can
be achieved by using optical transducers but the application is limited to a clean environment only.
467
Electromagnetic suspension and levitation
6.3.1.2. Inductiue. The basic principle employed in inductive transducers is that the
inductance of an iron- or air-cored coil is dependent on its proximity to a ferromagnetic
body or more particularly on the airgap between the two (Barwick et a1 1977). The
transducer measuring element is usually an E-shaped or U-shaped ferrite or high permeability steel laminated core (such as p-metal) with several hundred turns on it. A widely
used form of inductive transducer is constructed using the identical coils (Hazlerigg 1974),
one being the transducer and the other a reference coil (figure 47). The coils are elements
of a Maxwell bridge which is in balance when the inductance of the two coils is equal.
Any imbalance of the bridge due to airgap variations of the transducer coil is fed to a
phase-sensitive detector to discriminate the direction of displacement. The bandwidth is
limited by the filter circuitry but the transducer can be made to give linear output over a
large range. A variant of the inductive transducer as described above is one which
operates against a non-magnetic conducting surface such as an aluminium sheet. The
turns
I
I
- 4I
-~
yo->-
-
3 9k
-
~
Figure 47. Circuit for inductive position transducer with bridge and phase-sensitive rectifier.
change in inductance of the coil in this case is due to the induced eddy currents (Sinha
1977b).
6.3.1.3. Magnetic. A magnetic transducer consists of a permanent magnet with a Hall
plate on its face measuring the gap flux density when placed in the proximity of another
ferromagnetic surface. The closer the magnet is to the rail, the greater the flux density.
This is partly due to the change in the operating point on the demagnetisation curve of
the magnet and partly due to the leakage flux being higher at larger gaps. A circuit
developed by Hodkinson (1972) takes the Hall voltage VH and uses it to control the
Hall current I H such that VH remains constant. In effect, the flux is multiplied by a
current proportional to the output voltage to achieve linearisation. The circuit is shown
in figure 48. It has been found (Jayawant et a1 1975) that for small gaps where the flux
density B approximately varies as the inverse of the gap, i.e. as l / z , and also a fraction
01 of the output of the amplifier A2 is fed back to its positive input terminals, the output
is given by
(6.13)
B V Jayawant
468
Output
T
iall
plate
Figure 48. Hall plate position transducer.
By an appropriate selection of the constants cz and c3 a virtually linear output can be
obtained for a range of z < czjc3. The bandwidth of these transducers is in excess of a few
kHz. The principal advantages of this transducer are that the output is DC, it is virtually
immune from noise and is of a fairly rugged construction.
These transducers are preferably used in conjuction with separate velocity and flux
control loops as shown in figure 42. In the small instrument type of suspension, however,
where separate transducers might be precluded on account of space restrictions, a modification shown in figure 49 has been found suitable instead. For a particular geometry,
the gap flux density B=kNI/z. Hence the gap can be determined from the quantity
I/B. In figure 49 the Hall plate is placed in the feedback path of the amplifier, thus
acting as a divider. When the amplification factor of the amplifier is large and since IH
is now determined by both B and V Oit, is easy to show that
R
vo =kl'B (kZZ, +k3)
--
(1x11
f kB)
-kAB
(6.14)
when k B = O the output voltage VoccZ/Bor z. This transducer has been called the Z/B
transducer (Whorlow 1978).
6.3.2. Magnets. The design of magnets for providing lift in magnetic suspension is
constrained by static design considerations on the one hand but also by dynamic considerations. Given that the magnets are to operate with airgaps of the order of 5-1 5 mm
the object of the design is to maximise the lift per unit power input and if the magnets are
intended for vehicle applications then to also minimise the weight of the magnet per unit
Fiux density
a
Voltage
LL.
magnet current
Constant voltage k3
x
Figure 49. Ill? transducer.
I,
Electromagnetic suspension and levitation
469
lift capability. Amongst the considerations which limit the static performance of lift
magnets are that the magnet material is ordinary mild steel, thus placing a relatively low
limit of flux density for saturation, and that the width of the track or the lift rail is
limited, thus restricting the window area and the pole face area.
The starting point of the design is to consider equation (6.2) giving the force of
attraction:
FK- (N1)2poA
22
where NI= ampere turns, z = airgap, A =pole face area.
The constant of proportionality is determined by the track and magnet geometry.
Over and above the useful flux which links both the magnet and the rail there is a considerable amount of leakage flux. It is therefore counterproductive to make the magnets,
if they are U-shaped, very much deeper than they are wide. In a given window area the
choice of coil materials rests between either copper or anodised aluminium. The latter
gives coils with much improved heat-dissipating capability but results in low-voltage
high-current coils. This is no particular disadvantage since it can be shown (Gondhalekar
1980) that on the basis of the forcing voltage to quiescent voltage ratio a high-current
design is to be preferred although a given window area produces the same time constant.
The commonly accepted choice of geometry for magnets is U-shaped, thus giving long
magnets travelling along this length. Magnets travelling at right angles and presenting
the track with alternating N-S polarities suffer from excessive induced eddy currents.
These result in increased drag forces, attenuation of the airgap flux density and thus
serious loss of lift at speed without a laminated track.
The factors discussed above also influence the dynamic characteristics and the
following features need particular consideration : (a) inductance of coils and time constant, (b) operating voltage and voltage needed to force currents to change rapidly
enough, (c) lateral guidance forces, ( d ) induced eddy current effects and (e) route switching of vehicles.
The time constants of magnets for 1-2 ton lift capability are of the order of several
hundred milliseconds and in order to obtain bandwidths of 10-25 Hz a forcing voltage
of about 3-5 times the steady-state voltage drop may be required. It is then possible to
calculate the rate at which the generated force can change (Jayawant 1981), i.e. the
slewing rate of the force.
The guidance forces generated by lateral displacement of magnets as shown in figure
50 are unlikely to be of sufficient magnitude for vehicle applications, even if currents are
increased to compensate for the reduction in the pole area to keep the airgap (and lift)
constant. By displacing magnets first on one side of the rail as shown in figure 50 and then
on the other and using twice the number of magnets to those required it has been demonstrated on the German vehicle Transrapid 01 that sufficient guidance forces can be
generated (the US Department of Transportation figure is 42% of the lift force). For
higher speed vehicles, capable of travelling in excess of 400 km h-1, it appears that separate guidance magnets are preferred (Gottzein et al 1977) on the grounds of avoiding
interaction between control systems of the guidance and lift functions.
The induced eddy currents in the rails due to the relative motion between the magnets
and the rails has a two-fold effect. In the same manner as in the case of superconducting
levitation it will produce an extra drag with similar speed-dependent characteristics. A
much more serious effect is, however, that the eddy currents will tend to reduce the airgap flux density quite significantly and since lift is proportional to the square of the flux
470
B V Jayawant
Figure 50. Computed field plot for a U-shaped magnet in a laterally displaced position.
density this will result in a drastic reduction in the lift capability of the magnets. There
appears to be little published literature (Yamamura and Ito 1975) on the subject, partly
in the belief that laminated rails will have to be used for high-speed vehicles and partly
because the problem is a genuinely difficult one to compute or evaluate experimentally.
An alternative solution to that of laminated rails appears to be through the use of
‘magnet wheels’, i.e. a number of short-length magnets as closely spaced as possible
operating at small airgaps. Results of this approach (Cramer 1979) seem to indicate
that the rail stays magnetised as the short magnets pass over a given section of the rail
at high speeds and particularly at small gaps the induced eddy currents are reduced to a
level not large enough to cause any concern at speeds of up to 500 km h-1.
The problem of changing routes, switching as it is called, for magnetically suspended
vehicles is rather a difficult one. In the Emsland project it is proposed to shift sections of
the track in much the same way as is done for railways. Proposals were made (Barwick
et a1 1977, Domande 1973) for using duplicate sets of magnets and duplicated rails at
switches but do not appear to have provided any experimental evidence. A small 4 ton
vehicle using a new geoinetry (Jayawant 1977, 1979) called the I magnet has been tested
by this author and is illustrated in figure 51 (plate). The advantage of this scheme is that
the vehicle wiil operate with an inverted L-shaped rail either on one side of the magnets
or the other or both. Hence there is no need to turn the magnets on and off as required
in the duplicate magnet scheme.
6.3.3. Power anzyliJeus. The recent rapid advances in the technology of attraction magnetic suspension are attributable almost entirely to the development of solid-state electronic devices and power devices at that. High power to weight ratio and efficiency
coupled with extreme reliability of operation are principal requirements for magnetic
suspension in almost any application. The early experimenters (Kemper 1937) had to
use valve amplifiers and although they succeeded in suspending substantial loads it is
not surprising that this work did not lead to many (if any) practical applications at the
time.
As pointed out in the previous subsection the time constants of typical magnets are
of the order of several hundred milliseconds and yet the magnet-amplifier combination
47 1
Electromagnetic suspension and levitation
must act as a closed loop control system of a bandwidth of at least 10Hz or more.
Fairly substantial reserve voltage to force rapid current changes in the magnet in order
to overcome the inductive voltage is, therefore, an essential feature in the design of DC
power amplifiers in this context. This requirement in turn can lead to large power
dissipation and low efficiencies in quiescent operating conditions.
The choice of amplifier configuration is essentially between Class A and Class D.
These two configurations are illustrated in figure 52. The active linear regulator or the
active switch is either a transistor or a thyristor. The Class A amplifier is obviously
preferable, because of its smooth current regulation capability, to Class D where the
on-off sequence is bound to interfere with the transducers, particularly the flux loop
transducers which are mounted on the magnet faces. However, when the efficiencies of
the two schemes are considered in the light of power dissipated in the output stage
(transistors) it is quite clear that for large power applications Class D is the only real
choice (Hodkinson 1974). There are several problems associated with the use of Class D
amplifiers such as the added complexity of the pulse-width modulators, although this
offers the possibility of isolation between control and power circuits, using either transformers or opto-isolators. There are often problems of both audio noise as well as RF
interference with other circuits, but these are not serious.
D-b fi?
Active !inear regulator
Active switch
r---i
r - - - i
Magnet
source
jlijre+
source
I
I
I
I
Recirculotl an
diode
L -i
Recirculation
mode
io 1
16)
Figure 52. Types of power amplifiers. (U) Class A, (b) class D.
6.4. Contactless support and frictionless bearing applications of controIied
magnetic suspension
DC
electro-
The current popularity of suspension and levitation stems no doubt from the possibilities
in high-speed ground transportation schemes. Whilst these are both challenging and
exciting there is considerable scope for the application of suspension techniques to
achieving frictionless bearings. The requirement in this case is often for close tolerances,
low power consumption, small airgaps and, in general, compactness. Thus, the controlled DC electromagnet schemes have received more attention than the other techniques
of repulsion levitation. Of the many applications investigated three are described here
as they illustrate the diverse nature of requirements which may be fulfilled as well as the
versatility with which this may be achieved through the use of magnetic suspension.
The first application is that of a flowmeter (Jayawant and Aylwin 1978), in particular
for measuring flow rates of the order of 1-3 mile h-1. A prototype instrument is shown
in figure 53 (plate). It consists of a central turbine-type rotor suspended between two
controlled DC electromagnets. The electromagnets are pot-core-shaped and have the
I / B transducers in the pole face ($6.3.1.3). The axis of the magnets and the rotor can be
horizontal or vertical or at any other angle. Even in the horizontal position there is very
little drag due to induced eddy currents and in order to measure the speed of flows some
472
B V Jayawant
controlled eddy current damping must be introduced. Many other geometries are possible and the principal advantages are low power consumption and ruggedness in hostile
environments as compared to the alternative of rather high-precision low-friction bearings.
A second application is perhaps at the other end of the speed spectrum and is that of
turbomolecular pumps for extremely high vacua. The speed of the rotor is in excess of
10 000 RPM and the rotor can not only be held in suspension but also driven by an electric
motor such as an induction motor in a completely non-contact manner. If the pump
rotor and the driving motor are both in the high-vacuum chamber the problem of seals for
conventional bearings can be eliminated. The suspension stiffness required for such an
operation is rather high, the airgap clearance is very small and could only be achieved
in the restricted space available by using infrared transducers instead of (the conventional)
optical ones.
The third application is that of a centrifuge consisting of a steel drum which, when
full, weighs over 8 tons. The drum is suspended by two magnets at the top (figure 54
(plate)) and guided by two magnets at each end. The drum is driven by an arch-shaped
linear induction motor located in the middle. At its maximum the speed of the 1.6 m
diameter drum is 300 RPM and thus the peripheral speed is approximately 100 mile h-1.
The reasons for adopting magnetic suspension are elimination of noise created when
driven by steel rollers on which the drum rests as in the conventional equipment and
speeding up the process quite substantially due to the much higher speeds achieved. The
airgap between the rails on the drum and the magnets is 7 mm and the power consumption of each magnet is 900 W when the drum is stationary.
7. Assessment of electromagnetic suspension and levitation schemes
The current level of research activity and popular interest in this field stems primarily
from the possibilities in advanced ground transportation schemes as alternatives to the
conventional steel-wheel steel-rail form of transport. The activity in electromagnetic
methods has increased as it became apparent in the middle to late 1960s that the aircushion systems such as the Tracked Hovercraft in England or the Aerotrain in France
have serious limitations and operational difficulties, including noise. Whilst the magnetic
river scheme has probably produced more innovative thinking, as shown at the end of
55.3, the reactive power input needs to be much reduced before the scheme could be
considered as practicable. There is also no known large-scale model of it in operation
anywhere to base reasonable estimates of its performance at full scale. Permanent
magnet repulsion schemes may have applications in factory floor handling, say trolleys,
but again for high-speed or even urban applications it does not seem a likely candidate
as yet due to the unsolved problems of track laying and maintenance. This basically
leaves only the superconducting magnet levitation and the controlled DC electromagnet
schemes as the contenders for advanced ground transportation (AGT) schemes. Superconducting magnet schemes have been full of unsolved problems, not the least those of
cryostats, and work on them has come to a standstill except in Japan. The Japanese
National Railway scheme has propulsion units on board the vehicle and, therefore, the
problem of power collection at speed has still to be tackled. It is, however, possible to
invert the arrangement, i.e. to have a long stator, and this arrangement was tested in
Erlangen in Germany and is proposed in the Canadian scheme. Neither for this scheme
nor for the controlled DC electromagnet scheme employing linear synchronous motors
with air-cored winding on the track are any reliable costs available. Until these are
Electromagnetic suspension and levitation
473
available it is difficult to foresee whether such schemes could be implemented even on a
trans-European basis. The AGT high-speed systems must be considered as being in direct
competition with aircraft and it is conceivable that when using aeroplanes to carry
passengers is no longer possible due to shortage of fossil fuels, electrically propelled
passenger carrying vehicles will be the only possible alternative. In the lower speed range
the DC electromagnet scheme is the only possible technology. Here the problems of power
pickup do not exist and the track costs also appear to be reduced significantly since it is
now the passive element. It may also be possible to combine the lift and propulsion
functions in the same magnets. Environmentally, such schemes will be acceptable due
to absence of noise and pollution but whether they could be made to fit into existing
urban environments remains debatable. Operationally the controlled DC electromagnetic
suspension systems offer substantial advantages over any wheeled systems on the grounds
of operating costs if fully automated and in terms of reliability and maintenance.
8000
2000
600
160
43
'0
3
Wa:king
0 25
4
1
16
50
750
1000
1000
Distance (mile)
Figure 55. Transport hierarchy.
It is of some interest in passing to take a look at the transport hierarchy of today
(figure 55). If it is assumed that people principally use three modes of transportwalking for less than mile, cars for 26-1 10 miles, and aeroplanes for distances of greater
than 200 miles-it is seen that there are some significant gaps for both urban and longdistance travel which at present are filled by various means from bicycles to trains and
could equally well be filled by electromagnetic systems of the type discussed. An innovatory public transport system must have sufficient passenger attraction potential mainly
to attract the motorist from his car for it to be acceptable to transport planners even
technically. For this purpose several criteria have been put forward (Grant 1973) which
include alignment flexibility to blend new systems into an existing city fabric, visual
intrusion, i.e. a light track of minimum cross section, a high frequency of service independent of labour costs which in turn requires ultra-high reliability, small cheap vehicles,
a short distance grid, low noise and pollution, ease of switching and maintenance and
*
474
B V Jayawant
freedom from service interruption due to bad weather. It is interesting to note that no
existing system will fulfil all these criteria.
In the application of magnetic suspension systems to frictionless bearings or supports
there is a very wide range of applications possible, with controlled DC electromagnet
schemes being most predominant. The cost of the suspension element seems to dominate
the thinking and for this reason the superconducting magnet schemes do not figure
predominantly. Although the control aspect is a good deal more difficult, controlled
permanent magnets offer the possibility of very small suspension power requirements.
It has already been proved that controlled DC electromagnet schemes are not only low
cost but also capable of operating satisfactorily in the most hostile environmental conditions from high vacuum to heavily contaminated atmospheres, from indoors to outdoors
and from extremely low temperatures to fairly high ones. The room for further adaptation
and innovation remains almost unlimited.
References
Anschiitz-Kaempfe H 1923a British Patent No 193397
__ 1923b US Patent No 1589039
Arkadiev V 1945 J. Phys., Moscow 9 148
_- 1947 Nature 160 330
Backers F T 1961 Philips Tech. Rev. 22 232-8
Bahmanyar H 1973 Novel transport systems with particular reference to contact free suspension. PhD
Thesis London University
Bahmanyar H and Ellison A J 1974 Proc. IEE Con$ on Linear Electric Machines. Publ. No I20 (Stevenage:
IEE) pp 203-7
Bamji F 1974 Proc. IEE Con$ on Linear Electric Machines. Publ. No 120 (Stevenage: IEE) pp 68-76
Baran W 1971 Z. Angew. Phys. 32 216-8
Barwell F T and Laithwaite E R 1967 Proc. Inst. Mech. Engrs. 181 3G
Barwick RW, McArthur S and Redfern M 1977 British Railways Board Research and Development
Dicision Tech. Rep. TREDYN 7
Beams J W 1937 J. Appl. Phys. 8 795-806
Becker J J 1970 Sei. Am. Dec, 92-100
Bedford BD, Peer LHB and Tonks L 1939 General Electric Rev. 42 246
Bevir M K 1976 UKAEA Culham Laboratory Preprint No CLM-P 458
Boerdijk A H 1956a Philips Res. Rep. 11 45-56
-1956b Philips Tech. Rev. 18 125-7
Borcherts R H , Davis LC, Reitz J R and Wilkie DF 1973 Proc. IEEE 61 569-78
Borcherts R H and Davis L C 1973 J. Appl. Phys. 43 2418-27
Braunbeck W 1939a Z . Phys. 112 753-63
-1939b 2.Phys. 112 764-9
-1953 Umschau 53 68-70
Buchold T A 1962 US Patent No 3044309
Cambridge Thermionic Corporation 1963 Electronic Design 11 7, 32-3
-1975 US Patent No 1401514
Chirgwin K M 1974Proc. IEE Con$ on Linear Electric Machines. Publ. No I20 (Stevenage: IEE) pp 236-43
Chrisinger JE, Tilton EL, Parkin WJ, Coffin JB and Covert EE 1963 J. R. Aero. Soc. 67 717-24
Clemens PL and Cortner A H 1963 Bibliography Arnold Engineering Center Tech. Documentary Rep.
AEDC-TDR-63-20
CoiTey HT, Barber T W and Chilton F 1969 J . Appl. Phys. 40 2161
Covert E E and Finston M 1973 Prog. Aerospace Sei. (Oxford: Pergamon) ch 2, pp27-107
Crain C D 1965 Design and critical calibration of a magnetic suspension system for wind tunnel models
AEDC-TR-65-187
Cramer W 1979 Colloq. on advanced ground transportation schemes. IEE Digest No 1979127
Culver W H and Davis M H 1957 Rand Corporation, Santa Monica, California. Rep. No R363
Electromagnetic suspension and levitation
475
Davis L C 1972 J. Appl. Phys. 43 4256-7
Domande H 1973 Proc. Conf. on Personal Rapid Transit, University of Minnesota (Milwaukee: University
of Minnesota) pp77-88
Dukes T A and Zapata R N 1969 IEEE Trans. AES-1 20-8
Earnshaw S 1842 Trans. Camb. Phil. Soc. 7 97-112
Eastham J F 1977 Electronics and Power 23 23942
__ 1978 The magnetic river. Paper presented to the Town meeting of the Science Research Council, UK,
Advanced Ground Transport Panel
Eastham A R (ed) 1975 CIGGT Rep. No TS-5
Eastham A R and Atherton D L 1975 IEEE Trans. MAG-11 2
Eastham J F and Balchin M J 1974Proc. IEE Conf on Linear Electric Machines. Publ. No I20 (Stevenage:
IEE) pp9-14
Eastham J F and Laithwaite E R 1973 Proc. IEE 120 337-43
-1974 PVOC.IEE 121 1099-108
Eastham A R and Rhodes R G 1971 Proc. 2nd Int. Symp. on electromagnetic suspension, Southampton
University (Southampton: Southampton University) ppEl-20
Edwards J D and Antably A el 1978 Proc. IEE 125 209-14
Ellison A J and Bahmanyar H 1974 Proc. IEE 121 122448
Evershed S 1900 J. IEE 29 743-9
Faus H T 1943 US Patent No 2315408
de Ferranti SZ 1947 British Patent No 590292
Forgacs R L 1973 Proc. IEEE 61 604-16
Frazier R H , Gillinson P J and Oberbeck G A 1974 Magnetic and electric suspension (Cambridge, Mass.:
MIT Press)
Freeman E M and Laithwaite E R 1968 Proc. IEE 115 538
Freeman E M and Lowther D A 1973 Proc. IEE 120 1499-506
Geary P J 1964 Survey of Instrument Parts No 6. SIRA Res. Rep. No R314
General Electric Co. (USA) 1963 GE Advanced Technology Laboratory, Schenectady, NY. Tech. Documentation Rep. No ASD-TDR-63
Gillinson PJ, Denhard W G and Frazier R H 1960 M I T Instrument Lab. Rep. No R-272
Gondhalekar V M 1980 Control aspects of magnetically suspended vehicles using controlled d.c. electromagnets. DPhil dissertation University of Sussex
Gottzein E, Brock K H , Schneider E and Pfefferl J 1977 Automatica 13 201-23
Gottzein E and Cramer W 1977Proc. IFAC Symp. on Multivariable Technological Systems, New Rrunswick
(Oxford : Pergamon)
Gottzein E, Cramer W, Ossenberg F W and Roche C 1975 Proc. IUTAM Symp. on the dynamics of
vehicles on roads and railway tracks. Delft (Amsterdam : Swets and Zeitlinger) pp504-30
Gottzein E and Lange B 1975 Automatica 11 271-84
Gottzein E, Meisinger R and Miller L 1979 ZEV-Glasers Ann. 103 227-32
Graeminger B 1912 British Patent No 74499, 24541
Grant BE 1973 Proc. Symp. on Adfianced Transport Systems, Warwick University (Coventry: Warwick
University) pp22-38
Greene A H 1974 IEEE Trans. MAG-10 431-4
Guderjahn CA, Wipf SL, Fink HJ, Boom RW, McKenzie KE, Williams D and Downey T 1969 J. Appl.
Phys. 40 2133-40
Guthberlet H G 1974 IEEE Trans. MAG-10 417-20
Hagihara S 1974 Elec. Engng, Japan 95 493-9
Harding J T and Tuffias R H 1960 California Institute of Technology, Jet Propulsion Laboratory, Tech.
Release No 34-100
Hazlerigg A D G 1974 Proc. IEE Con$ on Control Aspects of Guided Land Transport. Publ. No I17
(Stevenage: IEE) pp233-9
Hodkinson R L 1972 Suspension and stabilisation of an electric train by electromagnets. MSc dissertation
University of Sussex
__ 1974 Proc. IEE Conf. on Control Aspects of Guided Land Transport. Publ. No I17 (Stevenage: IEE)
~~184-92
Holmes F T 1937 Rev. Sei. Instrum. 8 4441-7
Homer JG, Rendle TC, Waiters CR, Wilson M N and Bevir M K 1977 J. Phys. D: Appl. Phys. 10
879-86
Jayawant BV 1977 Electronics and Power 23 236-8
476
B V Jayawant
-_ 1979 British Patent No 1557864
__ 1981 Electromagnetic suspension and levitation (London : Edward Arnold)
Jayawant BV and Aylwin D G 1978 British Patent No 1497801
Jayawant BV and Rea D P 1968 Proc. IEE 115 549-54
Jayawant BV and Sinha P K 1977 Automatica 13 605-10
Jayawant BV, Sinha P K and Aylwin D G 1976 Int. J. Control 24 627-39
Jayawant BV, Sinha PK, Wheeler AR, Whorlow R J and Willsher J 1975 Proc. IEE 123 941-8
Jenkins AW and Parker H M 1969 J. Appl. Phys. Suppl. 30 2385
Judd M and Goodyear M 1965 Magnetic suspension system. Annual Report of the Aeronautics Department,
Southampton University
Kammerlingh Onnes H 1911 Konik. Akad. Wetensch. Amsterdam Proc. 14 Comm. No 122b 113-5
Kaplan BZ 1967 Proc. IEE 114 1801-4
-1970 Electron. Lett. 6 70
Katz RM, Nene VD, Ravera R J and Skalski CA 1974 Trans. A S M E 96 G2, 204-12
Kellogg O D 1953 Foundations ofpotential theory (New York: Dover)
Kemper H 1937 German Patent No 643316, 644302
-1938 Sclzwebende auf hangung durch electro-magnetische kraft: eine moglichkeit fur eine grundsatlich
neue fort bewegungsart. E T 2 59, 15, 391-5
Kilgore R A and Hamlet J L 1966 Summary of A R L Symp. on magnetic wind tunnel model suspension and
balance systems ed F L Daum (Cambridge, Mass.: MIT) ARL 66-0135
Knobel HW 1964 Control Engng 11 70-1
Kunzler J E 1961 Rev. Mod. Phys. 33 501-9
Laithwaite E R 1965 Proc. IEE 112 2361-75
-1966 Induction machines for special purposes (Newnes)
_- 1973a High speed ground transport. Royal Institution discourse
-1973b Electronics andpower 19 310-2
__ 1977 Transport without wheels (Elek Science) ch 11
Laithwaite ER, Eastham J F , Bolton H and Fellows T G 1971 Proc. ZEE 118 1761-7
Linder D 1976 Proc. 2nd IEE Conf. on Advances in Magnetic Materials and their Applications. Publ.
No 142 (Stevenage: IEE) pp96-9
London F 1961 Superfluids (New York: Dover)
Mathias BT 1957 Sei. Am. 197 May, 92-103
McCaig M 1961 Elec. Rev. 169 425
-1967 Permanent magnets for repulsion devices. Swift and Levick Bulletin
Meisinger R 1975 Proc. IUTAM Symp. on the dynamics of vehicles on roads and railway tracks, Dert
(Amsterdam: Swets and Zeitlinger) pp531-54
__ 1977 Beitrage zur reglung einer magnet schwebebahn auf elastischem fahrweg. Dr. Ing. Dissertation
Technische Universitat Miinchen
kleissner W and Ochsenfeld R 1933 Naturw. 21 78
Nakamura S 1979 IEEE Trans. MAG-15 1428-33
Nakamura S, Takeuchi Y and Takahashi M 1979 IEEE Trans. MAG-15 1434-6
Nordsiek A T 1961 American Rocket Society, Guidance, Control and Navigation Conf , Stanford, Calif.
(New York: ARS) Paper No 1963-61
Ohno E, Iwomoto M and Yamada T 1973 Proc. IEEE 61 579-86
ONERA 1960 Engineer 210 5463, 67-8
Ooi BT and Banakar M H 1975 IEEE Trans. MAG-11 1418-20
Orkress EC, Wroughton D M , Coment ZG, Brace P H and Kelly J C R 1952 J. Appl. Phys. 23 1413
Outsuka T and Kyotani Y 1975 IEEE Trans. MAG-11 608-14
Papas C H 1977 Appl. Phys. 13 361-4
Pfann W G and Hagelbarger D W 1956 J. Appl. Phys. 27 12-8
Polgreen G R 1965 Transport possibilities with magnetic suspension. Electrical Times 25 August
-1966a New applications of modern magnets (London: McDonald)
-1966b Proc. Inst. Mech. Engrs 181 3G, 145-50
-1968 Engineer 226 632-6
-1971 Electronics and Power 127 233-7
Polonis D H , Butters R G and Parr J G 1954 Research 7 272
Popp K and Schiehlen W 1975 Proc. IUTAM Symp. on the dynamics of vehicles on roads and railway
tracks, Devt (Amsterdam: Swets and Zeitlinger) pp479-503
Powell J R 1963 The magnetic road. IEEE Paper 63-RR-4
Electromagnetic suspension and levitation
477
Powell J R and Danby G R 1966 A S M E Publ. 66WA/RR5
Reitz J R 1970 J . Appl. Phys. 41 2067-71
Reitz J R and Borcherts R H 1975 ZEEE Trans. MAG-11 615-8
Reitz JR, Borcherts RH, Davis L C and Wilkie D F 1972 Ford Motor Co., Tech. Rep. No FRA-RT-72-40
Reitz J R and Davis L C 1972 J. Appl. Phys. 43 1547-53
Rhodes R G 1976Proc. 6th Int. Cryogenic Engineering Conf., Grenoble (Grenoble: University of Grenoble)
~~63-7
Rhodes R G , Mulhall B and Abel E 1974 Proc. ZEE Conf. on Control Aspects of Guided Land Transport.
Publ. No 117 (Stevenage: IEE) pp214-20
ROSSJ A 1973 PUOC.
ZEEE 61 617-20
Rutherford Laboratory and Culham Laboratory 1976 A new system for magnetic levitation. Brochure for
the Royal Society Conversazione
Schoenberg D 1960 Superconductivity (Cambridge: Cambridge University Press) pp16-20
Schreibe W 1953 Metall. 7 751
Silver K R and Henderson J G 1969 J. Aircraft 6 398
Simon I 1953 J. Appl. Phys. 24 19-24
Sinha P K 1917a Proc. 4th M V T S Symposium (IFAC), New Brunswick (Oxford: Pergamon) pp573-81
-1977b Proc. IEE Conf. on New Developments in Automatic Testing. Publ. No 158 (Stevenage: IEE)
~~22-3
Skinner D J and Edwards D R 1978 Discussion at a meeting on Superconducting Cables, IEE Savoy Place,
London
Slemon G R 1975 Trans. IEEE MAG-11 1478-83
Tang CH, Harold W J and Chu R S 1975 Trans. IEEE MAG-11 625-6
Temple G and Bickley W 1933 Rayleigh’s principle (Oxford: Oxford University Press)
Thornton R D 1973 Proc. ZEEE 61 586-98
Tournier M and Laurenceau P 1957 Recherche Aeronautique 59 21-6
University of Virginia 1962 Tech. documentary rep. for Aeronautical Systems Division, Air Force Systems
Command, Wright Patterson Base, Ohio, No ASD-TDR-62-441
Uranker L 1974 ZEEE Trans. MAG-10 421-4
Voigt H 1974 Wiss-ber-AEG-Telefunken 47 15-20
Weisberg L R 1959 Rev. Sei. Instrum. 30 135
West J C and Hesmondhalgh D E 1962 Proc. ZEE 109C 172-81
West JC and Jayawant BV 1962 Proc. ZEE 109A 292-300
Westinghouse Engineer 1965 Westinghouse Engineer 25 95-6
Whorlow R J 1978 Design of magnetic suspension systems and control of vehicles in networks. DPhil
Dissertation University of Sussex
Wilson A and Luff B 1966 Royal Aircraft Establishment, Farnborough, Tech. Rep. No. TN66248
Yamamura S 1976 ZEEE Trans. MAG-12 874-8
Yamamura S and Ito T 1975 Proc. INTERMAG Conf. (New York: IEEE) Paper No 28. 1
Electromagnetic suspension and levitation
Figure 3. Japanese National Railways superconducting magnet vchiclc. (Rcproducctl by permission of the
Japanese National Railways.)
Figure 6. University of Sussex I ton 4 passenger vehicle using controlled Dcelectromagnets for suspension.
Rep. f W R .
30
fh.VS.
198 I 44
see poges 418
and 423
B V Jayawant
Figure 7. MBB, 35 ton 68 passenger vehicle demonstrated in Hamburg Exhibition in 1979. (Reproduced
by permission of MBB.)
Figure 8. Model of the German I21 ton vehicle for the Emsland project. (Reproduced by permission of
MBB.)
Rep. Prog. Phys. 1981 44
see pare 423
Electromagnetic suspension and levitation
Figure 9. Japan Air Lines 8 passenger vehicle HSST-02.(Reproduced by permission of Japan Air Lines.)
Rep. Prog. Phys. 1981 44
see page 423
B V Jowiiwnt
Figure 11. Mixed p levitation. (0)Iron disc suspended near a superconducting sphere. (h) iron disc
suspended inside a (superconducting) magnetic flux screen, ( c ) iron hody suspended between
two constant fluxcoils.
Rep. Prog. Plrys. 1981 44
see paKe 425
Electromagnetic suspension and levitation
Figure 13. Relative weights which can be supported by permanent magnets made of Alnico, barium
ferrite and cobalt samarium in repulsion. (Reproduced by permission of J Becker.)
Rep. Prog. Phys. 1981 44
see page 428
B
v Jq.nll~anf
Figure 40. Steel ball suspended under a controlled
Figure 51. I-magnet vehiclc with
Rep. Prog. Plty.~.1981 44
:I junctioii
DC
electromagnet.
i n [tic track.
sec pci~qes459 and 470
Electromagnetic suspension and levitation
Figure 53. A turbine rotor flowmeter.
Figure 54. 8 ton suspended steel drum centrifuge.
Rep. Prog. Phys. 1981 44
see pages 471 and 472
ELECTROMAGNETIC
LEVITATION
THESIS
2005
COMPILED BY: LANCE WILLIAMS
ACKNOWLEDGEMENTS
I would like to acknowledge the help and support of Professor J. Greene in the
formation and development of this thesis.
I would also like to acknowledge my friends and fellow students for their
willingness to assist with experiments and in lending advice.
Lastly, I would like to acknowledge Bill Beaty for his excellent web site. It is very
well organized and he provides several useful links for anyone interested in
magnetic levitation. I would highly recommend his website to anyone interested
in this fascinating topic.
TERMS OF REFERENCE
The aim of this thesis was to investigate magnetic levitation and to design a
working system capable of levitating an object from below. The system should be
able to levitate an object from below, clear of an array of electromagnets without
any form of support. There shouldn’t be any object, structure or device assisting
in levitation, on the same level of elevation as the levitating object. The control
and circuit complexities should be investigated and recommendations for
improving the designed system should be made.
SUMMARY
Magnetic levitation is the process of levitating an object by exploiting magnetic
fields. If the magnetic force of attraction is used, it is known as magnetic
suspension. If magnetic repulsion is used, it is known as magnetic levitation.
In the past, magnetic levitation was attempted by using permanent magnets.
Earnshaw’s theorem however, proves that this is mathematically impossible.
There exists no arrangement of static magnets of charges that can stably levitate
an object. There are however means of circumventing this theorem by altering its
basic assumptions. The following conditions are exceptions to Earnshaw’s
theorem:
•
Diamagnetism:
occurs
in
materials
which
have
a
relative
permeability less than one. The result is that is eddy currents are
induced in a diamagnetic material, it will repel magnetic flux.
•
The Meissner Effect: occurs in superconductors. Superconductors
have zero internal resistance. As such induced currents tend to
persist, and as a result the magnetic field they cause will persist as
well.
•
Oscillation: when an A current is passed through an electromagnet,
it behaves like a diamagnetic material.
•
Rotation: employed by the Levitron, it uses gyroscopic motion to
overcome levitation instability.
•
Feedback: used in conjunction with electromagnets to dynamically
adjust magnetic flux in order to maintain levitation.
Each of the above conditions provides solutions to the problem of magnetic
levitation. The focus of this thesis is the feedback technique. Feedback with
electromagnets can be divided into magnetic suspension and levitation.
Magnetic suspension works via the force of attraction between an electromagnet
and some object. If the object gets too close to the electromagnet, the current in
the electromagnet must be reduced. If the object gets too far, the current to the
electromagnet must be increased. Thus the information which must be sensed is
the position of the levitating object. The position can then be used to determine
how much current the electromagnet must receive. To prevent oscillations
however, the rate of change of position must used as well. The position
information can easily be differentiated to acquire the speed information required.
Electromagnetic levitation works via the magnetic force of repulsion. Using
repulsion though makes a much more difficult control problem. The levitating
object is now able to move in any direction, meaning that the control problem has
shifted from one dimension to three. There is much interest in levitation due to its
possible applications in high speed transport technology. These applications can
be broadly referred to as MagLev, which stands for magnetic levitation. A system
which more closely resembles the work done in this thesis project is the “MagLev
cradle”. The MagLev cradle is a system designed by Bill Beaty. It is able to
levitate a small rod magnet for a few seconds at a time. This system suffers from
serious instability. As such levitation can only be maintained for a few seconds.
The MagLev cradle utilizes an arrangement of up to 12 electromagnets and their
control circuits in a “v” configuration to levitate a bar magnet. The MagLev cradle
uses rapid switching circuits to control current to the electromagnets. If the bar
magnet falls too close to the electromagnet, the circuit switches on, thus applying
more repelling force. If the bar magnet rises too high above the electromagnet, it
turns off, thus removing the repelling force.
The system developed for this thesis uses the position sensing technique
employed by the magnetic cradle. Hall Effect sensors are placed on each of the
electromagnets in the system. Each electromagnet and its current control
circuitry operates as an independent system to levitate part of a bar magnet.
The Hall effect sensor is a device that senses magnetic flux. It is also capable of
detecting the magnetic flux orientation. It is placed on an electromagnet to sense
the presence of the bar magnet we wish to levitate. The circuitry is configured
such that is magnetic flux is detected; the system will energize the electromagnet
in order to make the net magnetic flux with the hall effect sensor zero. Therefore
this system electronically simulates the Meissner effect by repelling both north
and south poles of a magnet. Experiments were also done to investigate various
configurations of electromagnets in order to achieve stable magnetic levitation.
This current control circuit for the electromagnets used an opamp summer circuit
and a power amplification stage (sink/source transistor circuit). Initial tests
revealed that besides position sensing, speed information was required as well.
This was achieved by adding a phase lead circuit, which negated the phase lag
caused by the electromagnet (an inductive load) and the control circuitry.
Different configurations of electromagnets were used to attempt to levitate a bar
magnet. The main problem that was soon identified was that of keeping the
levitating bar magnet in the area above the electromagnets. Despite moving the
electromagnets closer and further apart, the bar magnet could not be effectively
trapped above the electromagnets. The bar magnet has a tendency to “slide” off
the ends, as the end magnets cannot react quickly enough to movements in the
bar magnet. Thus current system lacks the control circuitry required to achieve
stable electromagnetic levitation.
At present, pairs of electromagnets can effectively levitate part of a bar magnet
which is supported at one end. If the necessary control circuit required to
effectively hold the levitating bar magnet in position above the electromagnet can
be designed, then a working system can be quickly realised.
TABLE OF CONTENTS
ACKNOWLEDGEMENTS ......................................................................................................................... 2
TERMS OF REFERENCE.......................................................................................................................... 3
SUMMARY................................................................................................................................................... 4
TABLE OF CONTENTS ............................................................................................................................. 7
LIST OF ILLUSTRATIONS....................................................................................................................... 9
SYMBOLS .................................................................................................................................................. 10
1. INTRODUCTION TO MAGNETIC LEVITATION............................................................................ 1
2. THE EARNSHAW THEOREM ............................................................................................................. 2
2.1 QUANTUM THEORY .............................................................................................................. 2
2.2 ROTATION ............................................................................................................................... 3
2.3 DIAMAGNETISM .................................................................................................................... 3
2.4 MEISSNER EFFECT................................................................................................................. 3
2.5 FEEDBACK SYSTEMS............................................................................................................ 3
2.6 OSCILLATION ......................................................................................................................... 4
3. THE LEVITRON ..................................................................................................................................... 5
4. THE MEISSNER EFFECT AND SUPERCONDUCTORS ................................................................. 7
5. ELECTROMAGNETIC MAGNETIC SUSPENSION ....................................................................... 10
6. ELECTROMAGNETIC LEVITATION.............................................................................................. 16
6.1 MAGLEV................................................................................................................................. 16
6.1.1 DESIGN CONSIDERATIONS............................................................................................. 16
6.1.2 EXISTING SOLUTIONS ......................................................................................... 17
6.2 THE MAGLEV CRADLE ....................................................................................................... 19
6.2.1 OPERATION........................................................................................................... 19
6.2.2 SYSTEM PROBLEMS ............................................................................................. 21
7. ELECTROMAGNETIC LEVITATION SYSTEM DEVELOPMENT ............................................ 23
7.1 SYSTEM OVERVIEW............................................................................................................ 23
7.2 SYSTEM COMPONENT OVERVIEWS................................................................................ 25
7.2.1 ELECTROMAGNETS ............................................................................................. 25
7.2.2 RATIOMETRIC LINEAR HALL EFFECT SENSORS............................................. 25
7.3 ELECTROMAGNET CURRENT DRIVE CIRCUIT ............................................................. 27
7.4 INITIAL ELECTROMAGNETIC REPULSION TEST .......................................................... 33
7.5 PARTIAL ELECTROMAGNETIC LEVITATION TEST...................................................... 36
7.6 FULL ELECTROMAGNETIC LEVITATION TESTS .......................................................... 38
7.6.1 MAGNETIC LEVITATION TESTS (4 ELECTROMAGNETS) ................................ 38
7.6.2 MAGNETIC LEVITATION TESTS (5 ELECTROMAGNETS) ................................ 39
7.6.3 MAGNETIC LEVITATION TESTS (6 ELECTROMAGNETS) ................................ 40
8. FINDINGS .............................................................................................................................................. 44
8.1 ELECTROMAGNET CURRENT CONTROL CIRCUITS .................................................... 44
8.2 TEST BED STRUCTURE ....................................................................................................... 46
8.3 PHYSICAL ARRANGEMENTS OF ELECTROMAGNETS ................................................ 46
8.4 CONTROL ASPECTS............................................................................................................. 47
8.5 LEVEL OF OPERATION ....................................................................................................... 49
9. RECOMMENDATIONS ....................................................................................................................... 50
9.1 CURRENT CONTROL CIRCUITRY ..................................................................................... 50
9.2 ELECTROMAGNETS............................................................................................................. 51
9.3 CONTROL THEORY ASPECTS............................................................................................ 52
10. REFERENCES ..................................................................................................................................... 53
11. BIBLIOGRAPHY................................................................................................................................. 54
LIST OF ILLUSTRATIONS
Fig1: The Levitron top levitating above its permanent magnet base.
Fig2: A magnet levitating above a superconductor
Fig3: Diagram showing the basic control arrangement of a magnetic suspension system.
Fig4: Diagram showing the physical model of a magnetic suspension system.
Fig5: Diagram showing a simple phase lead circuit
Fig6: Picture showing a magnetic suspension system in action.
Fig7: Diagram showing a simplified arrangement of electromagnets to levitate a train.
Fig8: Diagram showing the physical setup of the MagLev cradle.
Fig9: A diagram showing a systems view of a magnetic levitation device.
Fig10: Shows a possible physical arrangement for a magnetic levitation system.
Fig11: Shows the physical dimensions of the electromagnets used.
Fig12: Pictorial representation a Ratiometric Hall Effect Sensor
Fig13: Circuit diagram of a one opamp current control circuit
Fig14: Circuit diagram of a current control circuit with the addition of phase lead.
Fig15: Circuit diagram of a current control circuit using two opamps.
Fig16: Circuit diagram of a two opamp current control circuit with the addition of a transistor stage
gain limiting resistor.
Fig17: Diagram showing the physical layout of the magnetic repulsion tests.
Fig18: Circuit diagram of the two opamp current control circuit with the addition of phase lead.
Fig19: Diagram showing the physical layout of the partial magnetic levitation tests.
Fig20: Diagram showing sensor positioning modifications
Fig21: Diagram showing the physical layout of the 4 electromagnet full levitation test.
Fig22: Diagram showing the physical layout of the 5-electromagnet magnetic levitation tests.
Fig23: Physical layout of the 6 electromagnet magnetic levitation tests. (1st configuration)
Fig24: Physical layout of the 6 electromagnet magnetic levitation tests. (2nd configuration)
SYMBOLS
mV/G: millivolts per Gauss
K:
Kelvin
C:
capacitance (farads)
A:
area of capacitor plates (m2)
ε0:
permittivity of free space
ε r:
relative permeability
1. INTRODUCTION TO MAGNETIC LEVITATION
Magnetic levitation is the process of levitating an object by exploiting magnetic
fields. In other words, it is overcoming the gravitational force on an object by
applying a counteracting magnetic field. Either the magnetic force of repulsion or
attraction can be used. In the case of magnetic attraction, the experiment is
known as magnetic suspension. Using magnetic repulsion, it becomes magnetic
levitation.
In the past, magnetic levitation was attempted by using permanent magnets.
Attempts were made to find the correct arrangement of permanent magnets to
levitate another smaller magnet, or to suspend a magnet or some other object
made of a ferrous material. It was however, mathematically proven by Earnshaw
that a static arrangement of permanent magnets or charges could not stably
magnetically levitate an object
Apart from permanent magnets, other ways to produce magnetic fields can also
be used to perform levitation. One of these is an electrodynamic system, which
exploits Lenz’s law. When a magnet is moving relative to a conductor in close
proximity, a current is induced within the conductor. This induced current will
cause an opposing magnetic field. This opposing magnetic field can be used to
levitate a magnet. This means of overcoming the restrictions identified by
Earnshaw is referred to as oscillation.
Electrodynamic magnetic levitation also results from an effect observed in
superconductors. This effect was observed by Meissner and is known as the
Meissner effect. This is a special case of diamagnetism.
This thesis will mainly deal with electromagnetic levitation using feedback
techniques to attain stable levitation of a bar magnet.
2. THE EARNSHAW THEOREM
Earnshaw’s theorem basically proves that a static magnet cannot be levitated by
any arrangement of permanent magnets or charges. This can be simply proved
as follows:
“The static force as a function of position F(x) acting on any body in vacuum due to
gravitation, electrostatic and magnetostatic fields will always be divergenceless. divF =
0. At a point of equilibrium the force is zero. If the equilibrium is stable the force must
point in towards the point of equilibrium on some small sphere around the point.
However, by Gauss' theorem,
s∫
F(x).dS = v ∫divF. dV
The integral of the radial component of the force over the surface must be equal to the
integral of the divergence of the force over the volume inside which is zero.” – (Philip
Gibbs and Andre Geim, March 1997)
This theorem though makes certain assumptions. Thus the result can be
circumvented under certain conditions. The exceptions to Earnshaw’s theorem
are as follows:
2.1 QUANTUM THEORY
Firstly this theorem only takes into account classical physics and not quantum
mechanics. At the atomic level there is a type of levitation occurring through
forces of repulsion between particles. This effect is so small however, that it is
not generally considered as magnetic levitation.
2.2 ROTATION
This property is used in the patented magnetic levitation display called the
Levitron. The Levitron uses an arrangement of static permanent magnets to
levitate a smaller magnet. The system overcomes the instability described in
Earnshaw’s theorem by rotating the levitating magnet at high speed.
2.3 DIAMAGNETISM
Earnshaw’s theorem doesn’t apply to diamagnetic materials, because they
have a relative permeability less than one. This means that they don’t behave
like regular magnets, as they will tend to repel any magnetic flux.
2.4 MEISSNER EFFECT
A special case of diamagnetism is observed in conductors cooled to below
their critical temperature (typically close to 0 K). Below this temperature, they
become superconductors, with an internal resistance of zero. They attain a
relative permeability of zero, making them the perfect diamagnetic material.
This allows them to maintain their repelling magnetic field as long as a foreign
source of magnetic flux is present.
2.5 FEEDBACK SYSTEMS
The position of the levitating magnet can be sensed and used to control the
field strength of an electromagnet. Thus the tendency for instability can be
removed by constantly correcting the magnetic field strength of the
electromagnets to keep a permanent magnet levitated.
2.6 OSCILLATION
Passing an alternating current through an electromagnet causes eddy
currents to flow within its core. These currents according to Lenz’s law will
flow such that they repel a nearby magnetic field. Thus, it causes the
electromagnet to behave like a diamagnetic material.
Ref: Philip Gibbs and Andre Geim, “magnetic levitation”. , March 1997. [Online]
http://math.ucr.edu/home/baez/physics/General/Levitation/levitation.html ,
(October, 2005)
3. THE LEVITRON
The Levitron is a commercial toy that was invented by Roy Harrigan. It is a
patented device that performs magnetic levitation with permanent magnets. It
overcomes the limitation set by Earnshaw’s theorem through rotation.
The base consists of a carefully arranged set of permanent magnets. The object
that is levitated is a circular permanent magnet inside a spinning top shape.
Harrigan found that the instability described by Earnshaw could be overcome by
having the levitating magnet spin at high speed. This gyroscopic motion provides
a simple solution to the spatial instability problem defined by Earnshaw.
Harrigan was able to determine the speed above which the levitating magnet
would have to spin in order to maintain stable levitation. If the angular speed was
too slow, the gyroscopic stabilising effect would be lost. The spinning top shape
for the levitating magnet was adopted in order to reduce the drag caused by air
friction as the top spins. Thus it would be able to spin for longer.
He also found that as the top spins, a diamagnetic effect occurs. The motion of
the spinning levitating top relative to the base magnets causes a current to be
induced in the spinning top. The induced currents set up a magnetic field which
opposes the base magnets in such a way that it tries to slow the rotation of the
levitating top, causing the levitating time to be reduced. Thus the Levitron uses
ceramic magnets and ceramic materials instead of conducting metals. This
reduces the induced currents and thus the unwanted opposing magnetic fields.
This allows the top to spin for longer.
Because the air friction and induced currents cannot be completely eliminated
however, the levitating effect cannot be maintained or controlled.
Fig1: The Levitron top levitating above its permanent magnet base.
Image from: http://www.physics.ucla.edu/marty/levitron/
Ref: Martin D. Simon, Lee O. Heflinger 1997. “Spin stabilized magnetic levitation”,
American Journal of Physics (April 1997)
4. THE MEISSNER EFFECT AND SUPERCONDUCTORS
One of the interesting properties of superconductors was researched by
Meissner, and is known as the Meissner effect. The Meissner effect is a
phenomenon that occurs when certain conductors are cooled below their critical
temperature which is typically 0 K. It was observed that under this condition the
conductor would become a superconductor, and would in fact repel magnetic
fields of any orientation. In other words, a piece of superconducting material
cooled to below its critical temperature will repel a magnetic south pole or a
magnetic north pole, without having to move it. This is a special case of
diamagnetism.
In a conventional conductor such as copper, if a magnet is brought in proximity to
it, an electric current is induced in the copper. According to Lenz’s law, this
induced current will establish a magnetic field to counteract or oppose the nearby
magnetic field caused by the magnet. Due to the fact that copper is not a perfect
conductor however, the induced current quickly dies away due to the internal
resistance present in the conductor. When the current disappears, the magnetic
field collapses along with it. Thus, this induced current and its accompanying
magnetic field are only observed when the nearby magnet is moving. The
movement of the nearby magnetic field would then constantly stimulate the
induced current and the opposing magnetic field. This phenomenon explains the
damping effect that a copper plate in close proximity has on the movement of a
magnet.
As can be seen from the above explanation, theoretically, if the induced current
did not dissipate due to the resistance of the conductor, then the accompanying
magnetic field should persist as well. This is in effect, what happens in a
superconductor cooled to below its critical temperature. There is zero resistance
inside the superconductor, and so the induced current and its accompanying
magnetic field would not dissipate, even if the magnet stopped moving. As long
as the magnet is present, the opposing magnetic field will exist. This causes a
magnet brought close to a cooled superconductor to be repelled, regardless of
which magnetic pole the superconductor is exposed to. The opposing magnetic
field induced in a superconductor can become so strong that it can effectively
match the downwards force on a nearby magnet caused by its weight. The
resultant effect observed is that a magnet, placed above a cooled
superconductor, can remain there, stably levitated.
This does not however explain how come the magnet remains stably levitated
above the superconductor without “slipping” off the side. As Earnshaw showed,
simple magnetic repulsion is not sufficient to maintain stable levitation. This
problem is solved at the molecular level. Within the superconductor are
impurities, i.e. areas which do not have electric current flowing in them, and as a
result are not producing an opposing magnetic field. These areas, although
small, are big enough to allow regions of the magnetic field from the nearby
magnet to penetrate the superconductor. If the magnet moved, the magnetic field
would have to move with it. But because the magnetic field is unable to penetrate
the superconductor in any other area, the magnetic field is effectively locked in
place. Thus, because the magnetic field is being held in place by the “holes” in
the opposing magnetic field of the super conductor, the magnet too, is held in
place. This is what holds the magnet in place above the superconductor and
keeps it stably levitated. This is known as flux pinning.
Fig2: A magnet levitating above a superconductor
Image from: http://math.ucr.edu/home/baez/physics/General/Levitation/levitation.html
Ref: “The Meissner Effect” [online]
http://www.users.qwest.net/~csconductor/Experiment_Guide/Meissner%20Effect.htm
(October 2005)
5. ELECTROMAGNETIC MAGNETIC SUSPENSION
The easiest way to levitate an object electromagnetically (from a control
perspective) is via magnetic suspension. The object that is to be levitated is
placed below an electromagnet (only one is required), and the strength of the
magnetic field produced by the electromagnet is controlled to exactly cancel out
the downward force on the object caused by its weight. This method circumvents
Earnshaw’s theorem by making use of feedback.
Thus the system only has to contend with one force, the levitating object’s
weight. This system works via the force of attraction between the electromagnet
and the object. Because of this, the levitating object does not need to be a
magnet; it can be any ferrous material. This further simplifies the design
considerations. To prevent the object from immediately attaching itself to the
electromagnet, the object’s position has to be sensed and this information fed
back into the control circuit regulating the current in the electromagnet. This
produces the basic feedback arrangement depicted below.
Fig3: Diagram showing the basic control arrangement of a magnetic suspension system.
Error
+
Position
setpoint
Current
control
circuitry
Electromagnet
current
-
Measured
position
Position
sensor
Electromagnet
Position
of object
If the object gets too close to the electromagnet, the current in the electromagnet
must be reduced. If the object gets too far, the current to the electromagnet must
be increased. A possible physical arrangement is shown below.
Fig4: Diagram showing the physical model of a magnetic suspension system.
Electromagnet
Position Sensor
Levitating Object
Supporting Stand
There are various ways to sense the position of the levitating object. One way is
optically. A beam of light is shone across the bottom of the electromagnet and
detected at the other side. As the object obscures more and more light (indicating
that the object is getting closer to the electromagnet) the electromagnet controller
limits the current more and more. As the object drops away from the
electromagnet, more light is exposed to the sensor, and the current to the
electromagnet is increased. This system can prove difficult to properly set up, as
the alignment of the light source and the light sensor is critical. Also critical is the
shape of the levitating object, because the rate at which light is obscured or
exposed should be linear as the object rises and falls. This will produce the best
results.
The position can also be sensed capacitively. A small metal plate can be placed
between the levitating object and the electromagnet. The capacitance between
the levitating object and the metal plate can be sensed and used to determine
the distance between the two. The advantage of this system is that the
capacitance between the plate and the object is always linear regardless of the
shape of the levitating object. The capacitance is given by the following equation.
C=
Aε0εr
d
C = capacitance (farads)
A = area of capacitor plates (m2)
ε0 = permittivity of free space
εr = relative permeability
d = distance between plates (m)
The metal plate positioning is also not as critical as the sensor positioning in the
optical solution, and is thus slightly easier to set up. The disadvantage of this
solution is that the metal plate placed below the electromagnet may have
undesired effects on the magnetic behaviour of the system. If the material is
ferrous, its proximity to the electromagnet and its shape would alter the resultant
magnetic field shape in the area of the levitating object. Also the circuitry required
to sense the capacitance accurately is fairly complex and sensitive to circuit
layouts.
Another means of position sensing is via ultra sonic sound transmitters. These
work on the concept of sonar. A chirp sound signal is transmitted and the time
taken for the signal to return after bouncing off the levitating object is used to
determine its distance. This however, is a very complex solution given the
simplicity of the system? Also because of the very short distance over which the
ultrasonic sensors would have to transmit, this solution becomes unfeasible.
The position can also be sensed with a Hall Effect sensor. For this solution, one
hall sensor can be placed on the north pole of the electromagnet, and the other
on the south pole. The hall sensor is a device which has a linearly increasing
voltage response to an increasing magnetic flux. It can detect both north poles
and south poles, by either raising its output voltage above its quiescent output
voltage, or decreasing its output voltage below its quiescent output voltage. The
outputs of both sensors can be sent to the inputs of a differential opamp in order
determine the difference between them.
When there is no object to levitate, the outputs of both sensors will be equal. As
an object approaches the bottom of the electromagnet however, it becomes
magnetized by the magnetic field of the electromagnet. Thus, there would exist
two magnetic fields on either side of the hall sensor on the bottom of the
electromagnet. One would be due to the electromagnet and the other due to the
magnetizing field in the levitating object. This would cause the bottom hall sensor
to detect the net magnetic field, while the top hall sensor would still be detecting
the magnetic field of the electromagnet only. The differential opamp would then
output a signal which could be used to control the current to the electromagnet.
Because the hall sensors have a linear response, the differential opamp output
would rise and fall linearly as the object rose and fell.
The circuit used to implement a solution of this nature only has to achieve linear
current control from 0 amperes to the maximum operating current. Only a single
supply is required, along with the sensor circuitry and the proper gain to the
current source control. It has been noted however in experiments with this
system, that oscillations in the levitating object exist due to the phase lag caused
by the current control circuitry and the electromagnet itself, which is in fact a
large inductive load. In physical terms, the problem is that the circuit reacts too
slowly to the changes in position of the levitating object. If the object drops it is
inherently accelerating. The control circuit would over compensate with a large
correcting current, and by the time it slacked off, the object would be accelerating
towards the electromagnet. This causes growing oscillations as the control
circuitry constantly over compensates until eventually levitation cannot be
maintained and the object falls.
Thus to counteract the phase lag caused by the control circuitry and the
electromagnet, phase lead needs to be added. In control terms, the position of
the levitating object is insufficient information to maintain stable levitation; the
rate of change of position is required as well, i.e. the speed. This can be
achieved with the basic circuit below.
Fig5: Diagram showing a simple phase lead circuit
R1
R2
C1
This circuit would be positioned between the position sensing circuitry and the
current control circuitry. As a heuristic, R2 is usually one tenth of R1 (to limit AC
current). C2 is determined based on the cut-off frequency, i.e. the frequency of
the oscillation that must be eliminated. This is determined according to the
equation:
1
f =
2πRC
f = frequency of oscillation (Hz)
R = R1 (ohms)
C = C1 (farads)
The position information is the dc signal and passes through the resistor R1,
giving it the appropriate gain. To obtain the speed, the position information is
differentiated with the resistor and capacitor combination in series. This is
indicated by R2 and C1 in parallel with R1. Thus both the position and the speed
information are summed to determine what the driving current should be. When
the levitating object is still or moving slowly, the position information is dominant.
If the object starts rising or falling quickly however, the speed information
becomes more dominant in the calculation of the necessary current. Thus the
effect of the acceleration of the object is nullified, and the unwanted oscillations
in the levitation of the object are damped.
Fig6: Picture showing a magnetic suspension system in action.
Image from: http://www.oz.net/~coilgun/levitation/home.htm
6. ELECTROMAGNETIC LEVITATION
The main driving interest behind electromagnetic levitation is in its applications in
mass transport. Much research is being done on the methods and complexities
of this technology. In its applications in mass transport, particularly trains, this
technology is loosely referred to as MagLev.
6.1 MAGLEV
This concept has already found commercial application in maglev trains.
MagLev is an acronym for magnetic levitation, and is most commonly used
when referring to trains. MagLev is desirable in such an application because
of the low maintenance for the track networks, and the low friction track that it
provides. Because many trains gain their energy from sources not on the
actual train, the energy requirements of the system become less stringent.
Therefore, even though, it takes a considerable amount of energy to levitate
the train, the energy can be feasibly obtained and transferred to the train.
6.1.1 Design Considerations
Various things need to be taken into account when considering the
levitation subsystem of a greater MagLev system. The most obvious
considerations are the requirements to levitate the train. These include the
force required to lift the train, energy consumption, drive systems (the way
in which electromagnets are arranged and triggered which causes the
train to move forward) and forces acting on the train as it travels at high
speed through turns.
Apart from this are the constructional and cost considerations of such a
system. For something as large as a train, these are quite important. The
comfort of the passengers is a priority in such an application. Oscillations
and sudden movements or accelerations are undesirable and can cause
great discomfort to passengers. As such, the control requirements are
very rigorous. Basically, the train must be kept, levitated, on track and
moving forward with the ability to stop as required. All this must preferably
be achieved through non contact methods, such as through the use of
magnetic fields.
6.1.2 Existing Solutions
Earnshaw’s theorem must be taken into account. However, as in the case
of the simple magnetic suspension system, MagLev seeks to circumvent
Earnshaw’s theorem through the use of feedback. There is however still
some research being done on using permanent magnets for this
application. The biggest strides however, are being made with
electromagnets
and
feedback
control.
Using
feedback
and
electromagnetic levitation, solves the fundamental problem described by
Earnshaw. The next issue of concern is useful levitating stability. The
various means of achieving this are through different arrangements of
electromagnets. These take advantage of either magnetic suspension or
magnetic levitation or both. Due to the rigid nature of the train’s structure,
and the fact that it must travel down a guided path, the configurations of
the electromagnets on the train and on the track become simpler. Below is
a diagram of a simplified arrangement of electromagnets for MagLev
systems.
Fig7: Diagram showing a simplified arrangement of electromagnets to levitate a train.
Train
Electromagnets
Track
The sideways motion of the train is just as important as the up and down
motion of the train. Thus the problem of magnetic levitation has shifted
from being a one dimensional problem as in the case of magnetic
suspension, to a three dimensional problem. Maglev train systems solve
this by various arrangements of electromagnet such as those depicted
above. The designer can then focus on the characteristics that are
required of each electromagnet, and then their relation to each other.
The relation or interaction between the various electromagnets is also
vital. Movement and shifts in momentum of the train can not only affect the
control circuitry of one electromagnet, but the individual circuits can have
negative effect on each other. The train can begin oscillating if there isn’t
some form of transfer of control information between the various control
circuits of the electromagnets. The same form of over compensation in
control systems as those discussed in the case of magnetic suspension
can occur in the maglev system if there is not a means for the various
control circuits to interact.
Newer developments in MagLev technology include research into
levitation with superconductors and other diamagnetic effects. These
include superconductor magnets housed in the train, repelling cheap, easy
to construct magnets built into the track. Diamagnetic effects being
exploited include oscillating methods as described earlier. Such a system
uses magnets housed in the train to repel AC current carrying conductors
housed in the track.
The advantage of using diamagnetic effects to perform magnetic levitation
is that that compared to a system using electromagnets for levitation, a
system using diamagnetic effects has a significantly larger air gap.
6.2 THE MAGLEV CRADLE
The aim of this thesis was to produce a working magnetic levitation system
capable of levitating an object clear of any support, without magnetic field
sources placed along side it on the same level of elevation. Only one such
similar system was found to exist. It is called the “MagLev cradle” and was
designed and built by Bill Beaty.
6.2.1 Operation
The MagLev cradle works by simulating the Meissner effect electronically.
The circuit simulates it in that it repels both north and south poles. The
basic premise of the system is that a hall sensor is placed on one end of
an electromagnet. The sensor output is sent to the current control circuitry
of the electromagnet after being properly modified with the correct gain
and polarity. The circuit is set up so that it attempts to maintain a resultant
magnetic field of zero within the hall sensor. This means that as a magnet
with, for example, the south pole exposed to the sensor, approaches the
sensor, the circuit will increase the current in the electromagnet in the
necessary direction to produce an opposing south pole from the
electromagnet. As the magnet moves closer to the sensor, the circuit will
drive the electromagnet with more current until the force is great enough
to match the weight of the magnet. This will also occur if the north pole of
the magnet is exposed to the sensor, thus the circuit emulates the
Meissner effect.
The MagLev cradle utilizes an arrangement of up to 12 such
electromagnets and their control circuits in a “v” configuration to levitate a
bar magnet. A “v” configuration is used to overcome any sideways motion
the bar magnet may experience and thus keeping it trapped in position,
levitated above the electromagnets. The MagLev cradle uses rapid
switching circuits to control current to the electromagnets. The amount of
time that the circuit remains on is a function of the distance of the bar
magnet. If the bar magnet falls too close to the electromagnet, the circuit
switches on, thus applying more repelling force. If the bar magnet rises too
high above the electromagnet, it turns off, thus removing the repelling
force. The bar magnet gradually reaches an equilibrium height, where the
electromagnets are constantly switching on and off to maintain the
levitation height. It may seem that this system would inherently cause the
bar magnet to oscillate in the air. This oscillation is damped by the inertia
of the bar magnet. The switching speed is so high, that the inertia of the
bar magnet keeps it stationary in mid air.
6.2.2 System Problems
It was observed however that system suffers from instability. The bar
magnet can only remain levitated for a few seconds before the oscillations
become too great and it falls. This is most likely due to the phase lag
problem identified in the magnetic suspension system. The solution is also
most likely to add phase lead into the circuit, i.e. to obtain the speed and
add it to the position information in order to damp this oscillation. As Beaty
noted, this damping could also be achieved physically by placing copper
plates perpendicular to the levitating bar magnet. If the bar magnet
oscillates, an electric current will be induced in the copper plate, causing
an opposing magnetic field to be established, which will damp out the bar
magnet’s movements. It was also noted that weights could be added to
the bar magnet to increase its inertia and in effect damp out the
oscillations in that way. This solution however would have undesirable
effects on the system’s performance. Things like the levitation height and
the speed of response (due to the levitating object being heavier) would
be adversely affected.
To repel both north and south poles, the magnetic cradle requires a split
power supply in order to provide different current directions in the
electromagnet as required. A simple transistor switching circuit controls
the average amount of current the electromagnets receive based on
sensor information. The position sensing is done with hall sensors
mounted on the ends of the electromagnets. The physical layout of the
MagLev cradle is shown below.
Fig8: Diagram showing the physical setup of the MagLev cradle.
Side View of Iron Bar with coils on rods. (2 required)
ss41
Each coil has an SS-41 Hall Sensor
placed on the end of the iron rod core,
with wires leading back to the circuitry
Rod magnet
floats here
Coils wound on
iron rods
End View
7. Electromagnetic Levitation System Development
The model developed for this thesis topic aimed to use continuous current control
to the electromagnets, instead of the switched current control used by the
MagLev cradle. Experiments were also done to investigate various configurations
of electromagnets in order to achieve stable magnetic levitation. The current
control circuitry and Hall Effect sensor system, would be tested first, and then
duplicated for each electromagnet added to the system. From there, control
circuitry would be designed and added as necessary.
7.1 SYSTEM OVERVIEW
Fig9: A diagram showing a systems view of a magnetic levitation device.
Electromagnet
Levitated
magnet
Position
sensor
Current
control
Single Electromagnet Levitation System
As is the premise with most magnetic levitation models, the system diagram
above shows the basic working of a magnetic levitation system. Because the
system designed for this thesis is simply made up of multiple electromagnets,
the above system diagram applies to each one. The interaction of these
systems will be discussed later on.
As in the MagLev Cradle, the operation of this system will be to detect the
position of the levitating magnet and drive the electromagnet accordingly. If
the magnet falls too close, the current in the electromagnet must be increased
to repel the levitating magnet more strongly. If it rises too high, the current in
the electromagnet must be reduced.
For this model, the object being levitated will be a bar magnet. The means of
sensing the position will be done by sensing the magnetic field of the
levitating magnet. The physical arrangement of the above system will be as
follows.
Fig10: Shows a possible physical arrangement for a magnetic levitation system.
Levitating Bar
magnet
Hall Effect
sensor
Electromagnet
7.2 SYSTEM COMPONENT OVERVIEWS
7.2.1 Electromagnets
The electromagnets are steel bolts with thin copper wire wound around
them. Two circular pieces of wooden hardboard are bolted to each end.
The coil itself is wrapped in masking tape .The coil has a dc resistance of
22 ohms.
Fig11: Shows the physical dimensions of the electromagnets used.
78mm
24mm
Hardboard collars
Coil
Steel Bolt
53mm
7.2.2 Ratiometric Linear Hall Effect Sensors
The Hall Effect Sensors are linear output devices which sense the
strength and polarity of nearby magnetic fields. Their part no. is
UGN3503u. The sensor itself comes in a small three pin IC package. Its
supply voltage is 4.5V - 6V and the supply current required is
approximately 9mA – 14mA. It outputs a quiescent voltage of 2.4V – 3V
depending on the supply voltage. The sensor sensitivity is dependent on
the supply voltage, but it is generally in the range of 1.4mV/G.
Fig12: Pictorial representation a Ratiometric Hall Effect Sensor.
UGN3503
(viewed from
branded side)
Branded side
Supply
voltage
Output
Common
7.3 ELECTROMAGNET CURRENT DRIVE CIRCUIT
The first current control circuit attempted is shown below.
Fig13: Circuit diagram of a one opamp current control circuit.
15V
6V
100µF
UGN3503
0.1µF
GND
1MΩ
1N007
Tip122
GND
15V
100kΩ
100Ω
LM741
+
GND
8.2kΩ
100kΩ
1N007
-15V
10kΩ
56kΩ
Tip127
ElectroMagnet
GND
GND
GND
-15V
100µF
0.1µF
-15V
The Hall Effect sensor (part no. ugn3503u) has a quiescent output voltage of
2.4 volts to 3 volts. This is dependant on the sensor’s supply voltage. The
sensor indicates whether a north pole or south pole is detected, by raising or
lowering its output voltage about its quiescent value. As the approaching
magnetic field strength increases, the output voltage will increase or decrease
linearly, depending on which magnetic pole it is exposed to. For the current in
the electromagnet to be able to reverse direction based on this information,
the sensor output would have to be made bipolar.
The opamp is used in its virtual earth configuration as an opamp summing
circuit. The potentiometer in the resistor divider is used to null out the
quiescent voltage of the sensor, by summing an equal and opposite voltage in
to the virtual earth point. Thus, at the opamp output, a bipolar signal is
achieved, with its polarity indicating which magnetic pole has been detected,
and its magnitude indicating the strength of the detected magnetic field. The
feedback resistor provides the gain required to increase the small dc
response from the sensor to a usable level. The two Darlington power
transistors are connected in a sink/source configuration with the load, and
their bases are driven by the opamp output. This setup emulates a power
opamp, by allowing a basic LM741 opamp to control a current much larger
than its specified rating.
The 100 ohm resistor between the transistor base and emitter allows a small
current to flow to magnetize the electromagnet even when a very weak field is
detected. The diodes were added to provide current surge protection, (even
though the Darlington transistors already have built in diodes), and the
capacitors to eliminate power supply noise.
The system was promising in initial testing without the load. When the
electromagnet was added however, the circuit suffered from severe instability.
As soon as the voltage across the electromagnet reached approximately 1.2
volts (i.e. as soon as the transistors turned on) the instability appeared as the
output voltage oscillated. Initially, successively larger capacitances were
added across the feedback resistor. Even though this did reduce the
magnitude of the oscillations across the load, they could not be eliminated.
Also the introduction of such large capacitances was hampering the speed of
response of the system. Next, a resistance was placed in series with the
electromagnet. This did reduce the magnitude of the oscillations, however, as
the value of resistance was increased, the amount of current in the
electromagnet had bee so drastically reduced that this solution was no longer
feasible. Because the problem only occurred when the electromagnet was
added, it was assumed that the oscillations were caused by the phase lag
introduced by the electromagnet. Thus the circuit was modified to the one
below in order to facilitate the introduction of phase lead.
Fig14: Circuit diagram of a current control circuit with the addition of phase lead.
6V
15V
UGN3503
Tip122
GND
100kΩ
100Ω
+
GND
LM741
8.2kΩ
100kΩ
GND
10kΩ
Tip127
56kΩ
ElectroMagnet
R2
-15V
-15V
R1
C1
100Ω
GND
This circuit performed current feedback by measuring the current through the
100 ohm resistor connected in series with the electromagnet. The phase lead
was then added into the feedback path in an attempt to correct the phase lag
of the electromagnet. The initial phase lead modification, and the variations
that followed, failed to have any effect on the oscillation frequency, or
amplitude. Unable to eliminate the oscillation at this stage, a voltage feedback
solution was experimented with. The circuit below had only a slight
improvement over the original.
Fig15: Circuit diagram of a current control circuit using two opamps.
15V
6V
UGN3503
1MΩ
GND
100kΩ
+
-
100Ω
+
GND
8.2kΩ
ElectroMagnet
100kΩ
10kΩ
GND
GND
56kΩ
-15V
-15V
This circuit separated the opamp summer circuit and the current drive circuit.
The amplitude of the oscillations was reduced; however, it was observed that
a very high frequency of oscillation still existed, in the order of 7 MHz. This
oscillation appeared when the voltage across the load rose to over 2.38 volts.
This indicates that the oscillations appear very shortly after the transistor
turns on. Various changes were made to the physical layout of the circuit in
an attempt to eliminate the oscillations, suspecting that they were caused by
poor circuit configuration. These changes proved ineffective in minimizing the
amplitude of the oscillations or altering its frequency. This lead to the
modification shown below:
Fig16: Circuit diagram of a two opamp current control circuit with the addition of a
transistor stage gain limiting resistor.
15V
6V
UGN3503
1MΩ
GND
100kΩ
+
-
1kΩ
100Ω
+
GND
8.2kΩ
ElectroMagnet
100kΩ
10kΩ
GND
GND
56kΩ
-15V
-15V
The resistance added between the opamp output and the transistor bases
effectively reduces the gain of the transistor stage by creating a voltage
divider with 100 ohm resistor and the load. This modification was found to
completely eliminate the oscillations and instability at the cost of maximum
voltage that could be attained across the load. It would also suggest that
using TIP31 and TIP33 transistors instead of TIP122 and TIP127 transistors
would also have solved the oscillation problem (due to the former transistor
pair having a lower current gain). This resistance was gradually reduced until
a trade off was established. It was found that a resistance of 82 ohms
eliminated the oscillations while providing the largest possible voltage across
the load, which was approximately 10 volts. This modification proved to
stabilise the original circuit used in the first attempt as well. Thus both the
latest design and the original one could be tested for performance.
7.4 INITIAL ELECTROMAGNETIC REPULSION TEST
The next step was to test the magnetic repulsion of the system. To test this,
the following arrangement was established.
Fig17: Diagram showing the physical layout of the magnetic repulsion tests.
SIDE VIEW
Levitating Bar
magnet
Hall Effect sensor
This end is fixed to
prevent up/down
and side to side
motion
Electromagnet
TOP VIEW
Bar magnet
Hall Effect Sensor
Electromagnet
Keeping one end of the test magnet steady, the other end was brought into
proximity of the Hall Effect sensor which was attached to the electromagnet.
The Hall Effect sensor was placed on the centre axis of the electromagnet. It
was noted that the circuit is sensitive to the orientation of the electromagnet,
i.e. which way round it is connected. If the electromagnet is connected the
wrong way, then an approaching south pole for example, will cause the circuit
to produce a north pole from the electromagnet. This would be contrary to the
intended operation of the circuit and it would enter an unwanted mode. Thus it
is important to connect the electromagnet the right way around.
“You want negative feedback and proportional control rather than positive
feedback and latchup.” Beaty, B. “Maglev Magnetic Levitation Suspension
Device”. [online] http://amasci.com/maglev/magschem.html [October 2005]
Having done this correctly it was further observed that when the magnet was
brought close to the sensor it began to “bounce”. This was effectively an
oscillation of approximately 0.5 Hz which grew in amplitude until the bar
magnet was thrown clear. This is basically a manifestation of the problem
identified in the magnetic suspension system. Due to the phase lag of the
electromagnet and the circuitry, the position information is simply insufficient
to stably levitate an object. Therefore, phase lead needed to be added to the
system. This phase lead modification was as follows.
Fig18: Circuit diagram of the two opamp current control circuit with the addition of
phase lead. The right side of the complete circuit has been removed for simplicity.
6V
UGN3503
1MΩ
GND
680nF
10kΩ
GND
100kΩ
-
8.2kΩ
+
To power
amplifier stage
100kΩ
10kΩ
56kΩ
GND
-15V
The capacitor chosen was simply the largest manageable ceramic capacitor
available. Due to the low frequency of oscillation, 680nF proved sufficient to
completely eliminate oscillations in the movement of the bar magnet. From
these experiments it was observed that the area of maximum magnetic
repulsion was very small, and was found in the area directly above the Hall
Effect sensor. Out side of this region, the force of magnetic repulsion
decreases quite rapidly. Field strength falls to almost half with a deviation of
as little 0.5 cm from the ideal region.
7.5 PARTIAL ELECTROMAGNETIC LEVITATION TEST
The next experiment involved testing how well an arrangement of two
electromagnets could successfully levitate one end of a bar magnet if it is only
supported in two directions. The configuration of two electromagnets along
side each other depicted below was used.
Fig19: Diagram showing the physical layout of the partial magnetic levitation tests.
SIDE VIEW (END ON)
TOP VIEW
Bar Magnet
Bar Magnet
Hall Effect Sensors
Hall Effect
Sensors
Electromagnets
Electromagnets
As explained above however, because the area of maximum magnetic
repulsion is so small, there was insufficient magnetic field strength at the
desired point of levitation. This resulted in the bar magnet dropping in
between the two electromagnets, which were unable to repel it. To counter
this, the area of maximum effect was moved by changing the orientation of
the Hall Effect sensors. Instead of placing them on the centre axis of the
electromagnet, they were placed off the centre axis in such a way that they
were facing the levitating magnet.
Fig20: Diagram showing sensor positioning modifications.
SIDE VIEW (END ON)
TOP VIEW
Bar Magnet
Hall Effect
Sensors
Bar Magnet
Hall Effect
Sensors
Electromagnets
Electromagnets
This arrangement was successful in levitating one end of the bar magnet
which was only supported in two directions. The added advantage of placing
the hall effect sensor off the centre axis of the electromagnet, instead of
changing the angle of the electromagnet, is that it makes the circuit send
more current to the electromagnet, than is needed to repel the bar magnet.
By placing the Hall sensor in this way, the back face (the side attached to the
electromagnet) sees a weaker part of the magnetic field the electromagnet is
producing. Thus to match the strong approaching magnetic field of the bar
magnet, the circuit adjusts the electromagnet’s current to an amount that will
make the weaker part of its magnetic field equal to the strong magnetic field
of the bar magnet.
7.6 FULL ELECTROMAGNETIC LEVITATION TESTS
7.6.1 Magnetic Levitation Tests (4 Electromagnets)
Extending the success of the previous stage, where two electromagnets
could effectively levitate one end, the next step was to attempt total
levitation with four electromagnets. The arrangement shown below was
used.
Fig21: Diagram showing the physical layout of the 4 electromagnet full levitation test.
TOP VIEW
Levitating Bar Magnet
= Electromagnets
SIDE VIEWS
Levitating bar magnet
electromagnets
The above system was very sensitive to the positioning of the
electromagnets. If the electromagnet pairs were too far from each other,
the bar magnet would easily fall in between. If they were too close, then a
slightly weaker part of the magnetic field of the bar magnet would be
exposed to the Hall Effect Sensors. The result is that the electromagnets
do not get enough current, and the bar magnet will drop. The system is
less sensitive to the distance between electromagnets in a group repelling
the same magnetic pole. If the Hall Effect Sensors were properly
positioned on the surface of the electromagnet, then levitation of one of
the magnetic poles of the bar magnet could still be achieved.
7.6.2 Magnetic Levitation Tests (5 Electromagnets)
To try to solve the problem identified in the first experiment, the following
configuration was attempted.
Fig22: Diagram showing the physical layout of the 5 electromagnet magnetic levitation
tests.
TOP VIEW
Bar magnet
= Electromagnet
The reason for attempting this particular solution was to observe if the
sideways motion could be stopped with the addition of only one
electromagnet. The premise of this system is that, if the bar magnet is
stationary in the correct position, i.e. with the centre of the magnet
positioned
directly
above
the
centre
electromagnet,
then
that
electromagnet would not draw any current. This is because the magnetic
field of a bar magnet is at its weakest at the centre. Thus the Hall Effect
sensor wouldn’t detect a significant field and the centre electromagnet
would be off.
If however the bar magnet begins to slide, then there would be a stronger
magnetic field above the centre electromagnet. This would cause the
current control circuit to magnetize the centre electromagnet and repel the
stronger magnetic field of the approaching end of the bar magnet.
This solution didn’t work in actuality, because the strength of the magnetic
flux at the centre of the bar magnet was not strong enough. Thus, the
centre electromagnet could not create a large enough repelling forces
quickly enough to stop the sliding motion of the electromagnet.
7.6.3 Magnetic Levitation Tests (6 Electromagnets)
7.6.3.1 First Configuration
Of this number of electromagnets, two arrangements were tested. The first
was the following.
Fig23: Physical layout of the 6 electromagnet magnetic levitation tests. (1st configuration)
TOP VIEW
Bar magnet
= Electromagnet
In the above configuration, the extra electromagnets are placed in
between the outer pairs. It was found that even though the bar magnet
was directly above an electromagnet setup to repel it, it was at the ends of
the bar magnet that the most significant repelling force occurs. Thus the
middle electromagnets prevent the ends of the bar magnet from sliding
past them. At the same time the middle electromagnets can assist with
providing levitating thrust.
7.6.3.2 Observations (1st configuration)
Despite
the
now
larger
levitating
area
created
by
the
three
electromagnets, the bar magnet still tended to slide off the ends. Because
the inner electromagnets were directly beneath the levitating magnet, the
bar magnet tends to slide off the end and off to the side. This lateral
movement of the bar magnet is as a result of the repelling force exerted by
the inner electromagnets. This configuration, just like the previous ones,
was very sensitive to the distance between the electromagnets. Even
though marginal improvements were attained by adjusting electromagnet
and Hall Effect sensor positions, the main problem of sideways motion of
the bar magnet could not be stopped.
7.6.3.3 Second Configuration
The second configuration attempted was the design shown below.
Fig24: Physical layout of the 6 electromagnet magnetic levitation tests. (2nd
configuration)
TOP VIEW
Bar magnet
= Electromagnet
The problem in the previous configuration was that the bar magnet slid
sideways and swivelled as it fell. This was because of the magnetic
repelling of the electromagnets directly below it. To solve this problem, the
inside electromagnets were shifted to the outside. In this configuration, all
the magnetic repulsion force is concentrated below and to the outsides of
the levitating bar magnet.
7.6.3.4 Observations (2nd configuration)
As with the previous configurations, care must be taken to properly align
and space the electromagnets. The system used in this second test
worked only marginally better than the first. It was found that as the bar
magnet slid past one end it would in fact fall between the electromagnets
as it fell.
8. Findings
At the time of completion of this report, stable magnetic levitation could not be
fully achieved. As outlined above, the current system can only perform levitation
of a bar magnet that is being supported in a lateral direction. The final problem
proved to be a rather complex control one.
However, various observations could be made of the system to its current level of
completion. Levitation using the electronically simulated Meissner effect is quite
effective. Also, using the continuous current control method of driving the
electromagnet makes integrating control circuit solutions relatively simple.
8.1 ELECTROMAGNET CURRENT CONTROL CIRCUITS
At the power amplification stage, it was found that having the inductive load of
the electromagnet caused severe problems with the sink/source transistor
configuration. Due to the current gain across the TIP122 and TIP127, when
the electromagnet is added to the circuit, the output would oscillate at high
frequencies. The instability causes great problems in the final system,
because it means that the unstable electromagnet doesn’t have equivalent
magnetic repelling force to the other electromagnets in the system. This
inherently makes levitation impossible.
This oscillation causes further problems if it crosses the zero volt thresholds.
With the voltage across the electromagnet constantly changing, the
magnetising of the electromagnet’s steel core becomes affected. This causes
the electromagnet’s core to either magnetize too slowly or too quickly. This
further complicates an already sensitive system.
If the output is oscillating it is also drawing current. This negates one of the
desirable features of this circuit. Because the system tries to create a zero
magnetic field within the Hall Effect sensor, if there is no foreign magnetic
field, the electromagnet will not be fed current. In other words, even though
the circuit is on, it will not draw significant amounts of current if there is no
magnet to levitate. The electromagnet is only magnetized when a magnet to
levitate is brought into proximity of the Hall Effect sensor. In the event of
instability however, there exists an offset on the output, effectively causing the
electromagnet to draw more or less current than it should.
Thus to eliminate this instability problem, a resistor can be added between the
opamp (in the power amplification stage) and the transistor bases. As
indicated earlier, this comes at a cost. A trade-off exists between the
resistance required to eliminate the oscillation and the maximum voltage that
can be acquired across the electromagnet. The highest voltage that can be
attained across the electromagnet is determined by the saturation voltage of
the opamp, and the resistor divider formed by the stabilizing resistor, the
resistor for eliminating cross over distortion, and the electromagnet. Thus to
increase the voltage across the electromagnet, one or all of these factors can
be modified. To increase the saturation voltage of the opamp for instance, a
variant of the 741 opamp can be used, which can accept supply voltages of +
22V.
In monitoring the performance of the two versions of current control circuitry
used, no significant difference was found. Thus a decision on which one to
use in a future project would be based on the physical merits of each. Given
this consideration, the preferable choice would be the original design. The
necessary performance is achieved with just one opamp. This makes it a lot
easier and quicker to construct. Because much of the experimentation
involved testing various configurations and numbers of electromagnets, the
circuit which can be built and debugged the fastest is more desirable. With
fewer components in the circuit, there is also less that can go wrong.
8.2 TEST BED STRUCTURE
When testing the magnetic levitation capabilities of the system, it was found
that the repulsion force between the levitating bar magnet and the
electromagnet can be become so strong that the electromagnets themselves
may begin to move, which would ruin any experiments done. In experimenting
with various configurations though, one must still have the ability to quickly
and easily modify and change the position of the electromagnets in relation to
each other. In other words the arrangement must be flexible, but when an
experiment is initiated, the configuration and electromagnets themselves must
be firmly secure.
8.3 PHYSICAL ARRANGEMENTS OF ELECTROMAGNETS
It was found that the positioning of the Hall effect sensors on the surface of
the electromagnet could change the position of maximum magnetic repelling
force. To trap the bar magnet and prevent side to side motion, the maglev
cradle used electromagnets positioned at an angle in a “V” configuration. By
shifting the position of the Hall effect sensors, the same effect can be
simulated, even though the electromagnets are mounted in an upright,
vertical position.
The first configuration of electromagnets used to attempt to levitate the bar
magnet was four, arranged in a rectangular shape. This configuration proved
inadequate to achieve levitation. As outlined earlier, the problem was keeping
the levitating bar magnet in the area above the electromagnets. Even though
side to side motion was prevented by the electromagnets, the bar magnet still
had a tendency to “slide” off the ends. The area of effective levitation proved
to be very small, and the bar magnet would easily escape it if there was any
discrepancy of field strength between the ends. Despite moving the
electromagnets closer and further apart, the bar magnet could not be
effectively trapped above the electromagnets.
To try to combat this sliding motion, another electromagnet was added to the
system. This fifth electromagnet was added in the centre of the existing
rectangular shape. Even though this centre electromagnet circuit had an
increased gain in order to react to weaker magnetic fields, it was found that
the magnetic field near the centre of the bar magnet was far too weak to be
effectively repelled. Thus it could not stop the side ways sliding motion.
The next configurations attempted were various arrangements with six
electromagnets. These arrangements attempted to trap the bar magnet’s
magnetic field in a particular area, and in so doing keep the magnet in the
area above the electromagnets. These still proved insufficient to stop the
sliding motion of the levitating magnet. In doing these tests it was also found
that if the electromagnets weren’t aligned directly under the area of strongest
magnetic flux from the bar magnet, the levitating object would begin to
oscillate from side to side. This would indicate that cross coupling of sensor
information between the current control circuits is required.
8.4 CONTROL ASPECTS
In the initial testing of the repelling force of the electromagnets, it was found
that oscillations were a large problem. The magnet would effectively “bounce”
continuously until it fell clear. It was found however, that the addition of phase
lead helped greatly in eliminating this problem. Even though the “bouncing”
oscillations were of a very low frequency (approximately 2 Hz) it was
advantageous to restrict the size of the capacitor in the phase lead circuit.
This kept the speed of response of the circuit relatively quick.
As mentioned above, there was a problem with side ways oscillations in the
bar magnet when the electromagnets weren’t properly aligned. To attempt to
correct this, cross coupling of sensor information was attempted. This in turn
though greatly complicated the circuit. This solution failed to work, most likely
due to the sensor gain being too large. It was found that this caused parts of
the circuit to stop functioning. Most notable is that once the sensor data is
summed from the other sensors, the opamp on the power amplification stage
can no longer maintain the “virtual earth”. The output in turn, will saturate and
will no longer track changes in sensor data linearly.
The largest problem encountered from a control theory aspect was the side
ways sliding of the levitating bar magnet. The six electromagnet system has
the greatest chance of preventing this motion. It was found however that in
the experiments with this system, the response of the electromagnets was too
slow to stop the movement of the levitating bar magnet. By the time the
electromagnets could react to the motion of the bar magnet, it had already
slipped far enough from the ideal position to begin accelerating further from it.
Also problematic was the actual shape of the electromagnets. They are
slightly difficult to set into various positions and to get them sufficiently close
to one another. For this particular problem, the ideal was to get the end
electromagnets into such a position that they could respond with the
maximum repelling force to even the slightest movement in the levitating bar
magnet.
8.5 LEVEL OF OPERATION
As stated above the current level of operation of the system has failed to
achieve all the goals established in the beginning. The current system lacks
the control circuitry required to achieve stable electromagnetic levitation.
At present, pairs of electromagnets can effectively levitate part of a bar
magnet which is supported at one end. With careful positioning and arranging
of a six electromagnet system, partial levitation can be obtained with only the
sideways movement of the levitating bar magnet being physically restricted.
The individual parts of the system function well and as expected on their own.
The basic system without any control is able to partially perform its intended
function. As far as this is concerned, much was learnt and observed of the
basic working of the overall system.
9. Recommendations
9.1 CURRENT CONTROL CIRCUITRY
Two designs were used during the development of this project. However, in
the interests of quick construction, maintenance and modification, the initial
one opamp design should be used. This circuit has performed as expected
and would prove easier to work with especially as the system becomes more
complex.
In the construction of the above system, separate circuits were constructed as
electromagnets were added to the system. However, it may prove beneficial
to add electromagnets (as necessary) in sets. Thus the circuitry can be
accordingly constructed with dual and quad opamp IC packages. Even
though the maximum supply voltage of these systems is + 16V, the system
designed in this project was more than able to perform levitation from a + 15V
supply.
To eliminate the complex transistor sink/source stage, the current control can
also be done with power opamps. This may prove an alternate solution to the
oscillation problem experienced in the earlier stages of construction of this
thesis project.
Even though the circuit layout proved to be the least of the problems in the
final model, it is none the less important to take this in to account. This would
certainly prevent unwanted problems at the later stages of development.
9.2 ELECTROMAGNETS
From the experiments done, the minimum number of electromagnets required
is six. Fewer electromagnets than this would lead to unnecessary
complication of the final system, especially when control law is to be
implemented. There are various arrangements that could be attempted;
however, the following would prove the simplest to work with.
TOP VIEW
Bar magnet
= Electromagnet
At test phase of design, this layout should be as flexible as possible.
However, when a levitation test is initiated, care must be taken to firmly
secure all electromagnets to make sure that they are unable to move.
9.3 CONTROL THEORY ASPECTS
The phase lead additions to the individual circuits performed well during the
experiments. Further testing should be done though to examine more
specifically what effect this addition has on the speed of response of the
system. The main requirement from a control theory point of view is
preventing the sideways motion that the levitating magnet is inclined to have
in the current design.
The possible cause of this problem identified earlier was the slow response of
the end electromagnets. These magnets were unable to react quickly enough
to stop the levitating magnet from slipping off the end. These end magnets
require a faster speed of response than the primary levitating magnets (the
ones predominantly directly beneath the bar magnet). They also have to be
able to produce a relatively large magnetic flux in reaction to a very small
detected change in magnetic flux (caused by small movements of the
levitating bar magnet). In other words, they must have a larger gain than the
other magnetic levitation circuits.
This approach requires that an extensive analysis of the behaviour of this
uncontrolled system be done. The exact behaviour of the system can then be
used to determine the necessary control circuit required to effectively hold the
levitating bar magnet in position above the electromagnet. There was also a
slight side to side oscillation observed in the final stages of testing. Though
this could be eliminated with a more accurate control over the positioning of
the electromagnets, an additional failsafe should be added in the form of
cross coupling of sensor data. By feeding position and speed information
between the different electromagnet control circuits, a better more stable
levitation can be achieved. The elimination of these control problems should
ensure that a successful, working electromagnetic levitation model can be
achieved.
10. REFERENCES
Beaty, B. “Maglev Magnetic Levitation Suspension Device”. [online]
http://amasci.com/maglev/magschem.html [October 2005]
Hansen. B. “Chapter 6: Magnetic Levitation”. [online]
http://www.oz.net/~coilgun/levitation/home.htm [October 2005]
Hoadley, Rick. "Magnet Man" 1998-2005. [online]
http://my.execpc.com/~rhoadley/magindex.htm [October 2005]
Martin D. Simon, Lee O. Heflinger 1997. “Spin stabilized magnetic levitation”,
American Journal of Physics (April 1997)
Philip Gibbs, Andre Geim, March 1997 “magnetic levitation”. [online]
http://math.ucr.edu/home/baez/physics/General/Levitation/levitation.html
[October, 2005]
“The Meissner Effect” [online]
http://www.users.qwest.net/~csconductor/Experiment_Guide/Meissner%20Effect.htm
[October 2005]
11. BIBLIOGRAPHY
Cremer R., 1988, “Current-Status of Rare Earth Permanent Magnets”. Tenth
International Conference on Magnetically Levitated Systems (MagLev) 391-399
Jayawant B.V., "Electromagnetic Levitation and Suspension Techniques", Edward
Arnold, London, 1981
Smith R.J, Dorf R.C., “Circuits, Devices and Systems-5th Edition”, John Wiley & Sons,
Inc., 1992
Weh H., May H., Hupe H., 1988, “High Performance Magnetic Levitation with
Controlled Magnets and Magnets with Stable Characteristics”. Tenth International
Conference on Magnetically Levitated Systems (MagLev) 401-409































































































































































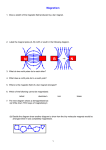




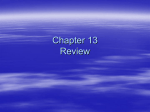
![magnetism review - Home [www.petoskeyschools.org]](http://s1.studyres.com/store/data/002621376_1-b85f20a3b377b451b69ac14d495d952c-150x150.png)