Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Control theory wikipedia , lookup
Electric motor wikipedia , lookup
Brushed DC electric motor wikipedia , lookup
Induction motor wikipedia , lookup
Control system wikipedia , lookup
Stepper motor wikipedia , lookup
Rectiverter wikipedia , lookup
Integrated circuit wikipedia , lookup
Opto-isolator wikipedia , lookup
Brushless DC electric motor wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Welcome to Workshop 88’s
Arduino 301:
Control the World!
Please have your Arduino, IDE,
and breadboard fired up and ready to go.
ver 1.0 2/2/14
What we’re going to cover
•
•
•
•
•
Arduino pins: What you can connect directly
For more muscle: Relays, Transistors
Solid state relays and 120VAC control
Movers: Servos, DC motors, Solenoids, Steppers
Bonus demo: BLDC motor intro
Some of this is Arduino, some basic electronics.
Please Introduce Yourself!
• Name, job, school etc
• Why you’re here
• Programming in general, and with
Arduino in particular
• Electronics experience: Digital?
Analog? AC house wiring?
• Hobby stuff: Robots? RC vehicles?
What we’re going to cover
•
•
•
•
Arduino pins: What you can connect directly
For more muscle: Relays, Transistors
Solid state relays and 120VAC control
Movers: Servos, DC motors, Solenoids, Steppers
Some of this is Arduino, some basic electronics.
Direct connect
• Arduino I/O pin hardware capabilities
Direct connect
• Arduino I/O pin hardware capabilities
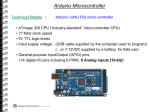
Atmel AVR processor
Direct connect
• Arduino I/O pin hardware capabilities
Atmel AVR processor
• 4 states
– Output: HIGH: ~5V, source ~20 mA
– Output: LOW: ~0V, sink ~20 mA
– Input: Hi-Z, no pullup
– Input: 38KΩ pullup to Vcc (5V often)
• Absolute Max V: Vcc + 0.5V
Atmel AVR Pins: Output
Atmel AVR Pins: Output
Atmel AVR Pins: Input - Normal
Atmel AVR Pins: Input - Pullup
Atmel AVR Pins: Input - Button
How do you know the details?
Look at the datasheet!
Direct connect (Output!)
• LED (with resistor!)
• Some input expecting a “logic level”
• Opto isolator (looks just like an LED!)
Direct connect: PWM
Digital output are either ON or OFF but a
computer can turn them ON and OFF really
fast.
If fast enough you get an effect in between
ON and OFF.
Works great for LED brightness control.
Direct connect: PWM
• The usual approach is called
Pulse Width Modulation
• AVR chips support PWM only on certain pins.
• Arduino does PWM by
analogWrite(pin,value).
• Must do pinMode(pin, OUTPUT);
• analogWrite() accepts 8-bit values (0-255).
Direct connect: PWM
Direct connect: PWM
(demo with scope)
Direct connect: PWM LED lab
Run up 2 LEDs, fading up/down,
180° out of phase.
Direct connect: PWM and LEDs
PWM is especially good for dimming
LEDs since brightness is directly
related to current.
Varying voltage to an LED+resistor
doesn’t work well at low levels.
Direct connect: PWM and LEDs
(demo LED with PWM v varied voltage
using scope meters)
Direct connect: logic level input
•
•
•
•
“TTL” standard
Servos (we’ll cover those later)
Serial communication
Any device with I2C or SPI interface
Direct connect: logic level input
Direct connect: opto isolator
What we’re going to cover
•
•
•
•
•
Arduino pins: What you can connect directly
For more muscle: Relays, Transistors
Solid state relays and 120VAC control
Movers: Servos, DC motors, Solenoids, Steppers
Bonus demo: BLDC motor intro
This is all basic electronics.
More muscle: Relays & Transistors
•Let us control higher CURRENT
•Let us control higher VOLTAGE
•Sometimes provide ISOLATION
More muscle: Relays
Classic open-frame relay
More muscle : Relays
What you’re likely to use: a reed relay
More muscle : Relays
Inside a reed relay
Relays: Snubber!
• Snubber, clamp, flyback, suppressor, freewheeling, catch diode
• Do some kind of demo
Snubber/Freewheel/Clamp Diode
More muscle : Transistors
We can use transistors as
electronically controlled switches.
(Sort of like a relay, but often better.)
More muscle : Transistors
•Lots of kinds of transistors
•We’ll use two:
•Common bipolar
•Metal Oxide Field Effect (MOSFET)
More muscle : Transistors: Bipolar
This is the most common
type of bipolar transistor,
and is the one we’ll
use here.
More muscle : Transistors: Bipolar
In general, transistors can be considered amplifiers, but
Think of it as this:
More muscle : Transistors: Bipolar
More muscle : Transistors: Bipolar
Point iN Place
More muscle : Transistors
More muscle : Transistors
Switching terms:
“HIGH
SIDE”
“LOW
SIDE”
More muscle : Transistors: Bipolar
More muscle : Transistors: Bipolar
How?
More muscle : Transistors: Bipolar
Inject small
current
into BASE
to EMITTER
to turn
transistor ON
Main
current
flow
More muscle : Transistors: Bipolar
More muscle : Transistors: Bipolar
More muscle : Transistor Lab 1
2N2222
More muscle : Transistors: Bipolar
What part numbers?
–NPN: 2N2222(A), 2N3904
–PNP: 2N2907, 2N3906
What’s important?
–Max collector voltage
–Max collector current
More muscle : Transistors: Bipolar
More muscle : Transistors: MOSFET
These are great!
• Voltage controlled
• VERY low ON
resistance
More muscle : Transistors: MOSFET
Think of it as this:
More muscle : Transistors: MOSFET
More muscle : Transistors: MOSFET
More muscle : Transistors: MOSFET
How?
More muscle : Transistors: MOSFET
More muscle : Transistor Lab 2
IRF630
What we’re going to cover
•
•
•
•
•
Arduino pins: What you can connect directly
For more muscle: Relays, Transistors
Solid state relays and 120VAC control
Movers: Servos, DC motors, Solenoids, Steppers
Bonus demo: BLDC motor intro
This is all basic electronics.
Optos: Solid State Relay
PWM does NOT work with these!
Optos: Solid State Relay
Optos: SSR Lab
Warning:
We’re not in Kansas any more, Toto. In
addition to 5V toys that couldn’t hurt
you if they tried, there’s exposed 120
volts AC here that can kill you.
Be careful out there.
Optos: SSR Lab
• Set up a “blink” sketch on your Arduino
• Use I/O pin of your choice
• Wire the AC side of the SSR in series with AC
plug and socket. Have your setup checked
BEFORE you plug it in!
• Wire the LED side of the SSR to your Arduino.
• Plug in and try it out!
What we’re going to cover
•
•
•
•
•
Arduino pins: What you can connect directly
For more muscle: Relays, Transistors
Solid state relays and 120VAC control
Movers: Servos, DC motors, Solenoids, Steppers
Bonus demo: BLDC motor intro
Some of this is Arduino, some basic electronics.
Movers
We’ll talk about these:
•
•
•
•
•
Servos
DC motors
Solenoids
Stepper motors
Brushless DC motors
Movers: Servos
Movers: Servos
•
•
•
•
Use feedback to control position
Hobby/RC servos use logic level pulse input
Continuous rotation servos are like motors
Other kinds exist
Movers: Servo feedback
Movers: Servo input
Movers: Servo library
Arduino controls PWM specifically to drive servos with the
SERVO library. Initialize like this:
#include <Servo.h>
Servo fred; // “myservo” would be better!
#define SERVOPIN 9
void setup(){
fred.attach(SERVOPIN);
}
void loop(){
}
Movers: Servo library
Telling servo where to go with Servo.write():
void loop(){
fred.write(90);
delay(1000);
// go to midpoint
fred.write(0);
delay(1000);
// go to one end of travel
fred.write(180);
delay(1000);
} //end loop()
// go to OTHER end of travel}
Movers: Servo library
Other functions in Servo library:
•Specify pulse width for 0, 180 in microseconds
fred.attach(pin, min, max);
544,2400
// default
•Read back latest position written with servo.write()
int angle = fred.read();
•Specify pulse width in microseconds
fred.writeMicroseconds(value);
Movers: Servo Lab
• Load the Sweep example
• Do NOT use the default pin
• Modify so that it:
– Sweeps twice as fast
– Pauses at each end of each sweep
• Predict what you’ll see with an LED on
the servo input pin (and check it out!)
Movers: Servo: RC transmitter
Movers: Servo: RC receiver
Movers: Continuous rotation servos
Movers: DC motors
• Always only 2 wires
• Reverse by reversing polarity
Movers: DC motors
Regular “brushed” motors controlled by:
•
•
•
•
Relays (old school!)
FETs
Use PWM for speed control
“H-bridges” for reversing direction
Movers: DC motors
Try this paper lab:
How can you arrange some
switches to connect a battery
and a DC motor so you can
control the motor direction?
Movers: H-bridge
Movers: H-bridge
Movers: H-bridge
A
B
Movers: H-bridge
Movers: H-bridge Lab
• Your board has 2 full H-bridges
• Each H-bridge has separate inputs for each
side (each “half H-bridge”).
– HIGH input connects that side to GND
– LOW input connects to VCC
• Hook a yellow motor across the MOTOR terms
• GND and VCC go to Arduino GND, +5V
• Inputs go to 2 Arduino output pins.
Movers: H-bridge Lab
• Use one input as direction control
• Use other input as PWM speed control
• Write code to demonstrate running forward
and reverse, with low and high speed for each
direction.
Movers: Robot Lab
1. Make robot.
2. Write code to:
– Drive forward in a gentle right
hand curve for ~1 second, Pause
– Turn 180° in place, Pause
– Return to start along same path
– Optionally do victory dance at end
Movers: Robot Lab
Special H-bridge cable
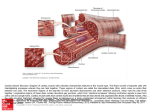
Movers: Solenoids
It’s an INDUCTIVE load. That means you must _______.
Movers: Steppers
What we’re going to cover
•
•
•
•
•
Arduino pins: What you can connect directly
For more muscle: Relays, Transistors
Solid state relays and 120VAC control
Movers: Servos, DC motors, Solenoids, Steppers
Bonus demo: BLDC motor intro
This is basic hobby electronics.
Movers: BLDC motors
“Brushless DC” motors:
• ARE brushless
• ARE NOT DC. They’re 3 phase AC
motors!
• Must use special 3 phase inverter, often
called an Electronic Speed Control to run
from DC supply
• Are often very light and efficient
Movers: BLDC motors: Quadcopter
Movers: BLDC motors
The interesting part is the ESC
• Has an embedded processor
• Uses PWM on the 3 phase AC for speed
control
• Speed control input is servo pulse train
• Hobby ESCs often provide 5V to run the
RC receiver. That’s called Battery
Eliminator Circuit.
Movers: Servo: RC receiver
Movers: ESC/BEC
ESC has to connect to receiver anyway
(for throttle info), so it provides power
to the receiver on the same cable.
Movers: BLDC demo
ESC programming 1
ESC programming 2
Thanks for coming!