Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
FTA receiver wikipedia , lookup
VHF omnidirectional range wikipedia , lookup
Distributed element filter wikipedia , lookup
Crystal radio wikipedia , lookup
Telecommunication wikipedia , lookup
Standing wave ratio wikipedia , lookup
Oscilloscope history wikipedia , lookup
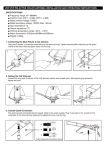
Mathematics of radio engineering wikipedia , lookup
Rectiverter wikipedia , lookup
Yagi–Uda antenna wikipedia , lookup
Analog-to-digital converter wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Audio crossover wikipedia , lookup
Analog television wikipedia , lookup
Phase-locked loop wikipedia , lookup
Operational amplifier wikipedia , lookup
Valve audio amplifier technical specification wikipedia , lookup
Battle of the Beams wikipedia , lookup
Wien bridge oscillator wikipedia , lookup
Radio direction finder wikipedia , lookup
Opto-isolator wikipedia , lookup
Continuous-wave radar wikipedia , lookup
Superheterodyne receiver wikipedia , lookup
Active electronically scanned array wikipedia , lookup
Cellular repeater wikipedia , lookup
Radio transmitter design wikipedia , lookup
Bellini–Tosi direction finder wikipedia , lookup
Valve RF amplifier wikipedia , lookup
History of wildlife tracking technology wikipedia , lookup
Direction finding wikipedia , lookup
Regenerative circuit wikipedia , lookup
The User Segment Receiver Design (Module 5) The User Segment consists of the receivers, processors, and antennas that allow land, sea, or airborne operators to receive the GPS satellite broadcasts and compute their precise position, velocity and time. 1 Basic Structure of a GPS Receiver Antenna RF front-end Position calculation A/D converter Receiver channel Analog signal Digital signal 2 History • More than 25 years have passed since the introduction of first commercial GPS receiver. • First receivers were based on analog signal processing, only using microprocessors for application calculations. Analog means receivers were large and consumed a lot of power. • When GPS Phase II satellites were launched in 1989, all analog signal processing was replaced by microprocessors and integrated circuits. • The modern standard GPS receivers are based on applications specific integrated circuits (ASICs) for signal processing and fast microprocessors for application calculations. An ASIC cannot be reprogrammed like the microprocessor but is effective. 3 Generic GPS Receiver RF stage Antenna LO Reference oscillator BPF M2 BPF AMP M1 AMP Amp BPF A/D Conv LO Frequency synthesizer Digitized IF signal Clocks Code acquisition/tracking Carrier acquisition/tracking External inputs Navigation processing including Kalman filtering Navigation outputs (position, velocity, time, Fault, detection/isolation) 4 The Antenna • Basic antenna: The most basic antenna is called "a quarter wave vertical", it is a quarter wavelength long and is a vertical radiator. Typical examples of this type would be seen installed on motor vehicles for two way communications. Technically the most basic antenna is an "isotropic radiator". This is a mythical antenna which radiates in all directions as does the light from a lamp bulb. It is the standard antenna. • Depending upon how the antenna is orientated physically determines its polarization. An antenna erected vertically is said to be "vertically polarized" while an antenna erected horizontally is said to be "horizontally polarized". Other specialized antennas exist with "cross polarization", having both vertical and horizontal components and can have "circular polarization". 5 Radio Theory • In a theoretical antenna called an isotropic antenna, radio waves are transmitted equally in all directions. • Power density from an antenna can be measured as milliwatts (mW) per centimeter squared, or mw/cm2. • In practice, no antenna works like an isotropic antenna, because no antenna gives a perfectly spherical transmission pattern. • In radio theory, we use mW, watts, or kilowatts; however, the numbers can get rather big and unmanageable, and so many engineers convert watts or mW into logarithmic references. If you work in mW, the expression is dBm. If you work in watts, the expression is dBW. With kilowatts, the expression is dBK. • The notation dB is for decibel. As a stand-alone notation, it is a ratio of gain, which can be added or subtracted to any referenced number. 6 Types of Antennas • • • • • • • • • • • The quarter wave vertical antenna Half wave dipole antenna (used for GPS) The folded dipole antenna The Yagi antenna UHF Yagi antenna Loop antennas Slot antennas Helical antennas (used for GPS) Microstrip antennas (used for GPS) Dish antennas Array antennas 7 Antenna Selection • A major selection criteria of antennas is the antenna gain. • In antenna design, gain is the logarithm of the ratio of the intensity of an antenna’s radiation pattern in the direction of strongest radiation to that of a reference antenna. If the reference antenna is an isotropic antenna, the gain is often expressed in units of dBi (decibels over isotropic). • Different antenna designs render different gain factors. A singleelement antenna may render a gain of 6 dB, whereas a microwave antenna may render a gain of 12 dB. A parabolic antenna could render a gain of over 60 dB. 8 Selection Criteria for GPS Antenna • GPS antenna is designed for use in the GPS. • Gain versus elevation: High gain for angles above a specified elevation angle. • Interference rejection: The antenna should reject signals in different frequency bands. • Multipath rejection: The antenna should reject multipath signals as effective as possible. Usually such signals arrive to the antenna as a result of reflection from the ground. • Physical properties: The antenna should have a size, shape, and material that makes it suitable to its environment. 9 Best Type of GPS Antenna • Questions are put to us almost daily as to which is the "best" type of GPS antenna. The answer is: there is no best type of antenna for all GPS applications. • The most popular type for consumer model receivers is the Quad Helix style. This style has several advantages and several disadvantages. • The most popular alternative is the Patch antenna. It too has advantages and disadvantages. Other GPS antenna configurations include: • • • • • Spiral Helices Microstrip (one form is the "patch" antenna.) Planar rings (aka "choke ring") Other multipath-resistant designs. 10 GPS Antennas: Microstrip Antennas L xf W yf Example of Calculated values Antenna width (W): 5.74 cm Antenna length (L): 4.49 cm Feedpoint (yf): 2.87 cm Feedpoint (xf): 1.09 cm Center frequency: 1575 MHz Diëlectric constant (Er): 4.5 Dielectric thickness (h): 1.6 mm Feed point 11 GPS Antennas: Helix Antennas 12 GPS Antennas: Dipole Antennas http://www.arrl.org/tis/info/pdf/0210036.pdf 13 RF Front End • The RF front end is the block that prepare the analog signal for sampling in the A/D converter. Practically, it is one-chip system to interface GPS antenna to GPS microcontroller. The front end contains two functionalities: • Signal Conditioning – Remove interfering signal components by using band pass filter. – The other functionality is to amplify the receiving signal. • Down Conversion – Signal is down converted from 1575.42 MHz to an intermediate frequency (IF) that is a couple of MHz. – The conversion is carried out by mixer mixing the input signal with that of local oscillator. 14 Basic Structure of a GPS Receiver RF Front-end Antenna Signal Mixer IF Filter Filter Amplifier Local oscillator Signal conditioning Down conversion 15 GPS RF Front-End IC 16 Down-Converting RF Signal to IF Signal Fourier transform of the LO signal Fourier transform of the input signal at RF Mixing the above two signal Resulting signal at IF after low-pass filtering 17 Image Frequencies 18 Signal to Noise Ratio • Very important aspect of receiver design is the signal-to-noise ratio (SNR) in the receiver IF bandwidth. • Typical GPS receiver bandwidths range from 2 MHz to 20 MHz. • Dominant type of noise is the thermal noise in the first RF amplifier stage of the receiver front end. • SNR is defined as the ratio of signal power to noise power in the IF bandwidth or the difference of these powers when expressed in decibles. N kTe B k 1.3806 10 23 J/K B is the bandwidth in Hz Te is the effective noise temperatu re in degrees Kelvin. The effective noise temperatu re is a function of sky noise, antenna noise temperatu re, linec losses, receiver noise temperatur e, and ambient te mperature. 19 Amplifiers • Amplifiers are used to increase the voltage or power amplitude of signals. They have many applications. • Audio voltage amplifiers boost the amplitude of signals between the frequency range 20 Hz to 20 KHz. This is the range of human hearing. They are often used as PRE-AMPLIFIERS before the main amplifier. • Audio power amplifiers provide the power necessary to drive loudspeakers. They also amplify a frequency range from 20 Hz to 20 KHz. • Intermediate frequency (IF) amplifiers are used in radio receivers. High frequency radio signals are changed to the lower intermediate frequency by a frequency changer circuit. 20 • Radio frequency (RF) amplifiers amplify a selected band of frequencies. RF extend from about 30 KHz up to several thousand MHz. The band of frequencies is selected by a bandpass filter or a tuning circuit. • Wide band amplifiers are designed to amplify a very wide band of frequencies, say from a few Hz up to several hundred MHz. • Video amplifiers are used in television cameras, receivers, VCRs, etc. The bandwidth extends from DC up to about 6 MHz. • Directly coupled amplifiers have no coupling capacitors between stages so that they are able to amplify DC signals. • Differential amplifiers have two inputs and amplify the difference between the two input voltages. If both inputs are the same then there is no output from the amplifier.If there is an interfering signal then it will be picked up by both inputs and will not be amplified. 21 Operational Amplifier • Operational amplifier is an amplifier whose output voltage is proportional to the negative of its input voltage and that boosts the amplitude of an input signal, many times, i.e., has a very high gain.High-gain amplifiers. • They were developed to be used in synthesizing mathematical operations in early analog computers, hence their name. • Typified by the series 741 (The integrated circuit contains 8-pin mini-DIP, 20 transistors and 11 resistors). • Used for amplifications, as switches, as filters, as rectifiers, and in digital circuits. • Take advantage of large open-loop gain. • It is usually connected so that part of the output is fed back to the input. • Can be used with positive feedback to produce oscillation. 22 The 741 Op-Amp Circuit 23 Operational Amplifier Model Symbols and Circuit Diagram Figure 8.4 24 The Ideal and Real Op-Amp • • • • • • • Ideal Amplifier: Two Inputs: – Inverting. – Non-inverting. Vo = A (V+ - V-) Gain A is large (). Vo = 0, when V+ = VInfinite input resistance, which produces no currents at the inputs. The output resistance is zero, so it does not affect the output of the amplifier by loading. The gain A is independent of the frequency. Real Amplifier: • Gain (105 - 109). • Input resistance – 106 for BJTs – 109 - 1012 • Output resistance: 100-1000 . 25 A Voltage Amplifier Simple Voltage Amplifier Model Figure 8.2, 8.3 Rin RL vin vS ; vL Avin RS Rin Rout RL Rin RL vS ; vin vS ; vL Avin vL A RS Rin Rout RL 26 Basic Operational Amplifiers • Noninverting amplifier means the output voltage increases when the input voltage increases. But there is usually a voltage gain. The gain formula for a noninverting amplifier is feedback resistance plus input resistance divided by input resistance. • Inverting amplifier means the output voltage decreases when the input voltage increases. The gain formula is feedback resistance divided by input resistance. • An important difference is the input impedance or current. The noninverting amplifier has very high input impedance, and consequently very low input current, because the signal goes directly to the input. But for the inverting amplifier the input impedance is the input resistor. When there is 1V input through the 1K resistor, the input current is 1mA. 27 vo Av vs Inverting Amplifier is i F iin vS v vout v is ; iF ; iin 0 Rs RF is i F ; iin 0; v v Figur vs vout vout vout e 8.5 Rs Av Rs RF Av RF RF vout vs Rs vs vs is ; Ri Rs Rs is 28 Design Example: Design an inverting amplifier with a closed loop voltage of Av = -5. Assume the op-amp is driven by a sinusoidal soorce, vs = 0.1 sin t volts, which has a source resistance of Rs = 1 k and which supply a maximum current of 5 A. Assume that the frequency is low. vs is ( Rs in this example means two resistances : Rs R1 Rsr . Rs Rsr represents the source resistance. Therefore is vs Rsr R1 v s (max) 0.1 If is (max) 5A, then we write R1 (min) Rsr 20 kΩ 6 is (max) 5 10 R2 R1 should be 19 k and Av 5. Rsr R1 Accordingly R2 5( Rsr R1 ) 5 20 100 k 29 Noninverting Amplifier Voltage Follower Figu re 8.8, 8.9 v s vs vout vout RF ; 1 Rs RF vs Rs vS vout 30 Design Example: Design a noninverting amplifier with a closed loop gain of Av = 5. The output voltage is limited to -10 V vo +10 V and the maximum current in any resistor is limited to 50 A Answer: R1 = 40 k, R2 = 160 k 31 Amplifier with a T-Network i2 vx R2 R4 i1 vs R1 0 0 + i3 R3 i4 vo R v x 0 i2 R2 vs ( 2 ) R1 v x v x v x vo i2 i4 i3 ; R2 R4 R3 Combing the above equations we get v R R R Av o 2 (1 3 3 ) 32 vs R1 R4 R2 Design Example: An op-amp with a T-network is to be used as a preamplifier for a microphone. The maximum microphone output voltage is 12 mV (rms) and the microphone has an output resistance of 1 k. The op-amp circuit is to be designed such that the maximum output voltage is 1.2 V (rms). The input amplifier resistance should be fairly large but all resistance values should be less than 500 k. 1. 2 100 0.012 R R Av 2 (1 3 ) R1 R4 Av R3 R1 R R If we choose 2 3 8 R1 R1 R R 100 8(1 3 ) 8; 3 10 .5 R4 R4 We should include the value of the source resistance in the calculatio n If we set R1 49 k and Rsr 1 k then the total resistance ( R1 effective ) will be 50 k R2 R3 400 k and R 4 38 .1 k 33 A Single Difference or Differential Amplifier vout R2 v2 v1 R1 R2 vout v Id R1 Figure 8.10 R2 Ad R1 34 Instrumentation Amplifier Input (a) and output (b) stages of Instrumentation amplifier Figure 8.14, 8.15 vout RF 2 R2 1 AV v1 v2 R R1 35 Op-amp Differentiator dvS (t ) vout (t ) RF CS dt Figure 8.35 36 Design Example. Design a difference amplifier with a specified gain and minimum differential input resistance. Design the circuit such that the differential gain is 30 and the minimum differential input resistance is Ri = 50 k Ri 2 R1 50 kΩ R1 R3 25 k R2 Since the differenti al gain is 30, R1 we must have R2 R4 750 kΩ 37 Design Example: Calculate the common-mode rejection ratio of a differential amplifier. Consider the difference amplifier shown in page 2. Let R2/R1 = 10 and R4/R3 = 11. Determine CMRR (dB) vo vo1 vo2 R4 R R 3 v ( R 2 ) v vo (1 2 ) I1 R4 I 2 R1 R1 1 R 3 11 vo (1 10 )( )v I 2 (10 )v I1 10 .0833 v I 2 10 v I1 1 11 vd vd v I1 v I 2 vd v I 2 v I1; vcm ; v I1 vcm ; v 2 vcm 2 2 2 v v vo 10 .0833 (vcm d ) 10 (vcm d ) 2 2 vo 10 .042 vd 0.0833 vcm ; vo Ad vd Acm vcm Ad 10 .042 ; Acm 0.0833 10.042 CMRR(dB) 20log 10 41 .6 dB 0.0833 38 Op-amp Integrator 1 vout (t ) RS CF t vS (t )dt Figure 8.30 39 Op-amp Differentiator dvS (t ) vout (t ) RF CS dt Figure 8.35 40 Filters • Electrical filters are like mechanical filters like the fuel filter or oil filter in your car. • Electrical filters may accomplish the same thing: removal of contaminating signals but the physical action is different. In electrical filters, we take advantage of the filter’s different responses at different frequencies, and the fact that many signals that are corrupted by noise have a signal and noise that have different frequency content. • Filters have different types: – Low-pass filter that preferentially pass low frequency signals. – High-pass filters that preferentially pass high frequency signals. – Band-pass filters that preferentially pass signals with a strong frequency component within a band of frequencies. – Band-reject filters that preferentially reject signals in a certain frequency band. 41 Op-amp Circuits Employing Complex Impedances Vout ZF ( j ) VS ZS Figure 8.20 Vout ZF ( j ) 1 VS ZS 42 Active Low-Pass Filter Figure 8.21, 8.23 Normalized Response of Active Low-pass Filter 43 Active High-Pass Filter Figure 8.24, 8.25 Normalized Response of Active High-pass Filter 44 Active Band-Pass Filter Figure 8.26, 8.27 Normalized Amplitude Response of Active Band-pass Filter 45 Filter Design • Can we use a simple passive filter (i.e., only passive components such as resistors, capacitors and inductors; no operational amplifiers. • The advantages of a passive filter are that it is quite simple to design and implement. It also provides a simple single pole or two pole filter whose electrical response can be easily calculated. For a single pole low-pass filter, fc = 1 / (2 RC) the filter roll-off is 6 dB per octave or 20 dB/decade. However, this filter does have some noticeable drawbacks: • It is very sensitive to the component value tolerances. • For low frequencies, the values of R and C can be quite large, leading to physically large components. 46 • A first or second-order filter may not give adequate roll-off. • If gain is required in the circuit, it cannot be added to the filter itself. • The filter may have a high output impedance. Since the resistor value is large, to keep the capacitors with reasonable values, the next stage device can see a significant source impedance. • An op amp can be added at the output, but why add the op amp here when it can be used to improve the filter’s performance in addition to lowering the output impedance? 47 Two-Port Network Vo ( s ) Transfer function T ( s ) Vi ( s) Filter tra nsmis sion T ( j ) T ( j ) e j ( ) Gain function G( ) 20 log T ( j ) Attenuation function A( ) 20 log T ( j ) 48 Transmission Characteristics 49 Specifications of the Transmission Characteristics 50 Transmission Characteristics for Band Pass Filter 51 Exercise 12.2: If the magnitude of passband transmission is to remain constant to within 5%, and if the stopband transmission is to be greater that 1% of the passband transmission, find Amax and Amin. Amax 20 log 1.05 20 log 0.95 0.9 dB Amin 1 20 log( ) 40 dB 0.01 52 The Filter Transfer Function T ( s) aM s M AM 1s M 1 .. a0 s N bN 1s N 1 .. b0 a M ( s z1 )( s z 2 )..( s z M ) T ( s) ( s p1 )( s p2 )..( s p M ) 53 Transmission Characteristics of Fifth Order Low Pass Fliter 54 Exercise 12.3: A second order filter has its poles at s (1 / 2) j ( 3 / 2). The transmiss ion is zero at 2 rad/s and is unity at DC. Find the transfer function. (s j2)(s - j2) T(s) k (s 1/2 j 3 / 2)(s 1/2 - j 3 / 2) k ( s 2 4) k ( s 2 4) s s 1 / 4 3 / 4) s2 s 1 T (0) 4k 1 k 1/ 4 2 1 s2 4 T ( s) 4 s2 s 1 55 Digitization • In modern GPS receivers digital signal processing is used to track the GPS signal, make pseudorange and Doppler measurements, and demodulate the 50-bps data stream. • For this purpose the down-converted signal is sampled and digitized by an analog-to-digital converter (ADC). • Most low-cost receivers use 1-bit quantization of the digitized samples. Accordingly, the receiver needs no automatic gain control (AGC). • However, typical-end receivers use anywhere from 1.5 bit to 3-bit (eight level) sample quantization. The receiver needs AGC. • Some military receivers use even more than 3-bit quantization. 56 Sampling a Signal on a Carrier Wave The sampling rate should be at least f s 2.f f s 2. f max f 2 MHz 1 f max f IF f 2 f max f IF 1 MHz 57 Receiver Channels The GPS signal processing takes places in different channels. Every satellite visible to the antenna is allocated to its own channel, limited by a maximum number of channels in the receiver. Code tracking Incoming signal Navigation data extraction Acquisition Pseudorange calculation Carrier tracking One receiver channel 58 Allocation of Channels • Before allocating a channel to a satellite, the receiver must know which satellites are visible. There are two common ways of finding visible satellites: • Warm start: The receiver combines information in the stored almanac data and the last position calculated by the receiver. The almanac data is used to calculate coarse positions of all satellites at the present time. These positions are then combined with the receiver position in an algorithm calculating which of the satellites should be visible. • Cold start: The receiver does not rely on any stored information. Instead it starts from scratch searching for satellites. The method of searching is referred to as acquisition. 59 Acquisition • The purpose of acquisition is first to identify if a certain satellite is visible to the user or not. If the satellite is visible, the acquisition must determine the following two properties of the signal: – Frequency: The frequency of the signal from a specific satellite can differ from its nominal value. Signals are affected by the relative motion of the satellite causing a Doppler effect. The Doppler frequency shift can in case of maximum velocity of the satellite combined with a very high user velocity approach values as high as 10 kHz. – Code Phase: The code phase denotes the point in the current data block where the C/A code begins. If a data block of 1 ms is examined, the data includes an entire C/A code and thus one beginning of a C/A code. 60 Acquiring a Satellite • When acquiring a satellite k, the incoming signal is multiplied with the local generated C/A code corresponding to the satellite k. The cross-correlation between C/A codes for different satellites implies that signals from other satellites are nearly removed by this procedure. To avoid removing the desired signal, the locally generated C/A code must be properly aligned in time, that is with the correct code phase. • After multiplication with the locally generated code, the signal must be mixed with a locally generated carrier wave. This done to remove the carrier wave of the received signal. To remove the carrier wave from the signal, the frequency of the locally generated signal must be close to the signal carrier frequency. The signal can change up to ± 10 kHz from the nominal frequency so different frequencies within this area must be tested. 61 • To make sure that a satellite is visible, it is sufficient to search the frequency in steps of 500 Hz resulting in 41 different frequencies in case of fast moving receiver and 21 in case of a static receiver. • After mixing with the locally generated carrier wave, all signal components are squared and summed providing a numerical value. • The acquisition procedure works as a search procedure. For each of the different frequencies 1023 different code phases are tried. • When all possibilities for code phase and frequency are tried, a search for the maximum value is performed. • If the maximum value exceeds a determined threshold, the satellite is acquired with the corresponding frequency and phase shift. 62 Tracking • The main purpose of tracking is to refine the coarse values of code phase and frequency, and keep track of these as the signal properties change over time. • The accuracy of the final value of the code phase is connected to the accuracy of the pseudorange calculated later on. • The tracking contains two parts, code tracking and carrier frequency/phase tracking. – Code tracking: This is implemented as a delay lock loop (DLL) where three local codes are generated and correlated with the incoming signal. – Carrier frequency/phase tracking: This tracking can be done in two ways. Either by tracking the phase of the signal or by tracking the frequency. 63 Navigation Data Extraction • When the signals are properly tracked, the C/A code and the carrier wave can be removed from the signal only leaving the navigation data bits. • The value of a data bit is found by integrating over a navigation bit period of 20 ms. • After reading about 30 s of data, the beginning of a sub-frame must be found in order to find the time when the data was transmitted from the satellite. • When the time transmission is found, the ephemeris data for the satellite must be decoded. This is later used to calculate the position of the satellite at the time of transmission. • Before making position calculation is necessary to calculate pseudoranges based on the time of the transmission from the satellite and the time of arrival at the receiver. The time of arrival is based on the beginning of the sub-frame. 64 Position Calculation The position is calculated from pseudoranges and satellite positions found from ephemeris data. 65 Receiver Design Choices • Number of channels and sequencing rate: GPS receiver must observe the signal from at least four satellites to obtain threedimensional position and velocity estimates. If the user altitude is known, three satellites will suffice. • Most modern GPS receivers have a sufficient number of channels to permit one satellite to be continuously observed on each channel. • In a single-channel receiver, all processing, such as acquisition, data demodulation, and code and carrier tracking, is performed by a single channel in which the signals from all observed satellites are time shared. • Although this reduces hardware complexity, the software required to mange the time-sharing process can be quite complex. 66 References • Global Positioning Systems by MS Grewal, LR Weill, AP Andrews, Wiley, 2001. • Peter Rinder and Nicolaj Bertelsen, Design of a Single GPS Software Receiver, Aalborg University 2004. • The Internet. 67