Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
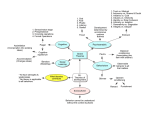
Cognitive Modeling – Human and Machine Learning Human and Machine Learning Cognitive Modeling Dominic Heger, Felix Putze, Tanja Schultz 20.6.2013 1/48 Cognitive Modeling – Human and Machine Learning Outline • Administrative Stuff • Human Learning • Behaviorist Learning Theory Classical and operant conditioning • Cognitive Learning Theory Jean Piaget and Lev Vygotsky • Connectionism / Learning in the brain • Machine Learning • Artificial Neural Networks • Imitation Learning / Learning by Demonstration • Social Interactive Learning • Learning in ACT-R • Explicit • Implicit 2/48 Cognitive Modeling – Human and Machine Learning Oral Exams • If you would like to take an oral exam in Cognitive Modeling • Please send an email to Mrs Scherer ([email protected]) • The email should include: You would like to have an exam in KM and within which module Your study program (BA Info, MA InWi, etc.) Your preferred day for the exam • Exam days are: • 26.07.2013 • 16.10.2013 • 17.10.2013 • First come first serve • You have to sign up for the exam online! 3/48 Cognitive Modeling – Human and Machine Learning Lecture Evaluation 4/48 Innate Behavior • Innate behavior: Abilities not acquired after birth Cognitive Modeling – Human and Machine Learning • Does not need to be learned or taught • Reflexes and Automatisms • Automatic unconscious reactions (may not require brain activity -> reflex arc) • Reflex: caused by stimulus • E.g. Startle reflex, coughing; breathing, heart beat, … • Instincts • Key stimulus causes (a complex) Fixed Action Pattern • E.g. Want attention -> cry, Hungry -> eat, … • Basic motor skills • E.g. Grasping, chewing, … • Learning and recognition • → Humans learn nearly all of their abilities after birth 5/48 Learning Cognitive Modeling – Human and Machine Learning • Learning is the core concept behind most human abilities • Definitions • Lefrancois1: Behavioral changes as a result of experiences • Tom Mitchell: Learning is improving performance at some task through experience • Learning theory and behavioral theory often used synonymously • Learning generates potential behavioral changes • Human and Machine Learning: To build systems motivated by Human abilities has long-established tradition in research 1Lefrancois: Psychologie des 6/48 Lernens, Springer Heidelberg, 4. Ed., p. 20 Why human learning ideas for machines? • Why transfer ideas from human learning to machine learning? Cognitive Modeling – Human and Machine Learning • Human abilities and machines abilities differ • Applications of Machine Learning • Where algorithms are too difficult to develop Algorithms describing natural processes can be extremely complex E.g. Speech recognition, walking • Adaptive Systems Continuously changing requirements E.g. Spam Filter Natural machine interaction E.g. Intuitive interfaces, Human-like behavior • Synthetic approach to science Model human behavior using computers/robots If successful: These are potentially good principles and methods → Understanding of human behavior and mind 7/48 Cognitive Modeling – Human and Machine Learning Important Factors of Human Learning • What are important factors influencing Human Learning? • Perception • Remember: Lecture on Perception and Attention • Memory • Remember: Lecture on Knowledge Representation and memory models • Limited throughput • Temporal characteristics: short term, long term, ... • Types of information: declarative, procedural, language, … • Motivation • • • • Emotions, Attitudes and Self concept Drives and needs (e.g. Maslow’s pyramid) Arousal (e.g. Yerkes-Dodson) and probability of success (e.g. Brehm) Cognitive dissonance (Festinger) 8/48 Overview on Learning Theory Cognitive Modeling – Human and Machine Learning • Traditional schools of learning theory • Behaviorism Psychology is science of behavior. Sources of behavior are external (observable environment) and not internal (mind) Variables: Stimulus and Response Methods: Animal experiments, transfer results to humans • Cognitivism Behavior is result of information processing with aspects of thinking, feeling, intentions, desires, expectations, appraisals,… Variables: Cognitive (intellectual) processes Methods: Mainly investigation of humans, empiric studies, … • Today, learning is mainly seen as cognitive process, however behaviorist ideas and principles are still important and valid and still vitally researched 9/48 Machine Learning Cognitive Modeling – Human and Machine Learning • Machine Learning is often classified into three broad types 1. Supervised Learning: Learning with a teacher Training instances are labeled 2. Unsupervised Learning: Learning with no help Training instances are not labeled 3. Reinforcement Learning: Learning with limited feedback Actions are rewarded or penalized 10/48 Cognitive Modeling – Human and Machine Learning Neural Networks • Idea: ML inspired by Human learning should use similar entities to those in the brain • Model complex network of simple basic elements (neurons) Property Biological NN Artificial NN #Computational units >6*10^10 neurons ~3*10^9 transistors in 10 core Xeon CPU (2011) #Connections ~10 to 10^4 inputs per neuron Usually < a few thousands of inputs per neuron Speed ~10^-3 s per operation ~10^-9 s per operation Energy 10^-16 joules per operation per sec 10^-6 joules per operation per sec Evolution Millions of years Early works in 1940s • Biological -> Artificial Neural Nets = Radical simplification 11/48 Cognitive Modeling – Human and Machine Learning Biological Neurons • Structure of Biological Neurons: 1. 2. 3. 4. Dendrites receive signals from connected neurons (through synapses) The cells body (soma) sums the incoming signals (spatially and temporally) Sufficient input is received (i.e. a threshold is exceeded) → neuron fires That action potential is transmitted along the axon to other neurons, or to structures outside the nervous systems (e.g., muscles) Received input is not sufficient (i.e. the threshold is not exceeded) → inputs quickly decay and no action potential is generated. Timing is important – input signals must arrive together, strong inputs will generate more action potentials per unit time 5. 6. 12/48 Cognitive Modeling – Human and Machine Learning Neuron Action Potential 13/48 McCulloch-Pitts Neurons Cognitive Modeling – Human and Machine Learning • Simplified computational model of biological neurons (1943) • Set of synapses bring in activation from other neurons • Processing unit sums up weighted inputs, and then applies non-linear activation function (aka transfer/threshold function) • Output (spike or no spike) is transmitted to other neurons 14/48 Spiking Neurons models Cognitive Modeling – Human and Machine Learning • Biological neurons are more complex • • • • Non-binary inputs and outputs, Non-linear summation, Timing characteristics, Intensity of postsynaptic potentials, instead of binary activation • Stochasticity,… • There are 20 different neuron spiking behaviors (Izhikevich, 2004) • Several models try to model biologically plausible behavior 15/48 Cognitive Modeling – Human and Machine Learning Hodgkin-Huxley model • Hodgkin and Huxley received Nobel Prize in Physiology or Medicine 1963 for description of mechanisms underlying the initiation and propagation of action potentials • Squid giant axons: ~0.5-1mm diameter • Computational model for ionic mechanisms (Na, K) of action potentials • The Hodgkin-Huxley model is usually not used in ANNs because it is computationally expensive (~1200 FLOPS per neuron) 16/48 Hodgkin-Huxley model Cognitive Modeling – Human and Machine Learning • Coupled non-linear differential equations tor temporal evolution of the membrane potential • Total membrane current is sum of K, Na, leakage, and external currents • 10s of parameters, but all biophysiological meaningful • Can produce (all of the) 20 different behaviors of neuron spiking 17/48 Cognitive Modeling – Human and Machine Learning Learning in the brain • Synaptic plasticity: Change of connection strength (synapse) between neurons • Repeated excitation of neurons increases cell connectivity strength (synaptic plasticity) • Hebb’s law (1949): “When an axon of cell A is near enough to excite cell B and repeatedly or persistently takes part in firing it, some growth process or metabolic change takes place in one or both cells such that A's efficiency, as one of the cells firing B, is increased” • “Neurons that fire together wire together” • Experimental evidence • Long Term Potentiation (LTP): Enhancement of synaptic transmission for hours and longer • LTP assumed to be one of the major cellular processes underlying learning 18/48 Hebbian Learning Cognitive Modeling – Human and Machine Learning • Hebbian Learning in Artificial Neural Networks (ANNs) • Biological learning model used e.g. in Self Organizing Maps and Hopfield Nets • Increase weights if conditioned and unconditioned stimulus occur simultaneously • Adjustment of the weights ∆wij=η ˑ ei‘ˑ ej η: learning rate ei’: postsynaptic potential at time t+1 ej: presynaptic potential at time t i • Note: Other common methods for training ANNs have no biological correspondence (e.g. error backpropagation) j wij Source mainly: Handbuch der Künstlichen Intelligenz, 4th ed. , Oldenbourg, p. 79f, 94f 19/48 Cognitive Modeling – Human and Machine Learning Classical Conditioning • Ivan Pavlov (1904 Nobel prize for Physiology or Medicine) • Classical Behavioristic experiment (Stimulus->Response): Measure physiological properties of the dog (salivation) • Unconditioned Stimulus (US) • Stimulus causing response (UR) without previous learning • Conditioned Stimulus (CS) • Previously neutral stimulus (NS) that causes response (CR) because of multiple occurrences in combination with US • Example: • Before training: Bell -> no specific reaction; Food (US) -> salivation (UR) • Training: Food (US) + bell (NS) -> salivation (UR) • Result: Bell (CS) -> salivation (CR) 20/48 Hebbian Learning and Classical Conditioning Cognitive Modeling – Human and Machine Learning • Before conditioning • Only US evokes response (R) • CS does not evoke response • Example: Dog sees food causes salivation i wij j • Repeatedly US + CS causing salivation • Increases of wij • ∆wij=η ˑ ei‘ˑ ej • Example: Simultaneously ring bell and serve food i wij j • CS can evoke response • CS evokes response (R) • Example: Ringing bell causes salivation i 21/48 wij j ANN Architectures Cognitive Modeling – Human and Machine Learning • Common ANN architectures are: • Single-Layer Feed-forward NNs One input layer and one output layer of processing units. No feed-back connections E.g. simple Perceptron • Multi-Layer Feed-forward NNs One or more hidden layers of processing units between one input and one output layers No feed-back connections E.g. Multi-Layer Perceptron • Recurrent NNs Any network with at least one feed-back connection. It may, or may not, have hidden units. E.g. Hopfield nets 22/48 Hopfield Nets Cognitive Modeling – Human and Machine Learning • Recurrent artificial neural networks • Each neuron is connected to each other neuron • Symmetric weights wij = wji , no self-loops wii=0 • Discrete case: Neurons take binary value -1 or 1 (can be seen as on and off states) • All neurons can be both input and output • Output of a neurons is input vector in the next step s wij si s'j sj (t+1)=sgn(s’j(t)) Neuronj ' j i wNj w1j w2j s1 23/48 s2 … sN Cognitive Modeling – Human and Machine Learning Hopfield Nets as Associative Memory • Human ability to retrieve information associated with an (incomplete) cue • Hopfield Nets as content-addressable associative memory • • • • Several different activation patterns can be learned in a network Produces for any input pattern a similar stored pattern Autoassociative memory: pattern completion of noisy or partial data Can reliably store up to 0.183*#neurons different examples • Asynchronous Network recall 1. 2. 3. 4. • Set pattern as input to the neurons Pick a neuron randomly Update its state Goto 2 until state does not change Synchronous recall is also possible 24/48 Cognitive Modeling – Human and Machine Learning Hopfield Nets as Associative Memory 25/48 Learning and Stability in Hopfield Nets Cognitive Modeling – Human and Machine Learning • Stability issues • Input activation causes process of neuron activation updates • Recurrency may cause divergence of activations or periodic cycles of activation • -> find weights wij so that activity converges into stable state for certain input patterns • Hopfield Nets utilize Hebb’s learning rule (training) P 1 ss • wij P is the number of training examples and i ≠ j N p 1 1 i j • Preserves mutual excitation and mutual inhibition of connected neurons 26/48 Cognitive Modeling – Human and Machine Learning Energy state of Hopfield Net • Thermodynamical model Each state of the net (activity of all neurons at certain point of time) is associated with an energy value Prove stability of the system1 E is a Lyapunov function, i.e. locally positive-definite function Energy always decreases when neuron states change If state is a local minimum in the energy function it is a stable state for the network From any initial state of the network, the network recall algorithm converges into a state, which is local minimum of E Local minima in energy function E correspond to states that are ‘near’ training examples 1See www.linux-related.de/studium/knn/Hopfield_Konvergenz.pdf for a coherent proof of convergence 27/48 Cognitive Modeling – Human and Machine Learning B. F. Skinner • B. F. Skinner (1904-1990) • Radical Behaviorism • Experiments “Skinner Box” • Different stimuli • Reward and punish actions of the rat 28/48 Operant Conditioning • Operant Conditioning Cognitive Modeling – Human and Machine Learning • Behavioral changes due to positive or negative consequences of behavior • Learning is based on reinforcement processes • Reinforcement/punishment: in/decrease of probability of occurrence • Applied Removed/avoided Rewarding event Positive reinforcement -> strengthen behavior Negative punishment -> weakening behavior Aversive event Positive punishment -> weakening behavior Negative reinforcement -> strengthen behavior • Examples • • • • Positive reinforcement: Good grade in the exam after learning hard Negative reinforcement: Getting up earlier to avoid heavy traffic Positive punishment: Detention after continuously talking in class Negative punishment: No computer gaming after truancy 29/48 Cognitive Modeling – Human and Machine Learning Reminder: Reinforcement Learning in ML • Reinforcement Learning can be seen as a ML form of Operant Conditioning (relationship between neurotransmitters and rewards) • • • • State space S Action space A Reward function r: S x A → R Goal: Find optimal policy π: S → A Policy that select the “best” action for each state • → Markov Decision Process(MDP) • Q-Learning 30/48 Cognitive Modeling – Human and Machine Learning Biofeedback • Application of Operant Conditioning • Feedback loop between human and his/her biosignals (brain, heart, muscle, breathing,…) • Support humans in learning to control certain biophysiological activities • Examples: Control heart rate, control certain brain activity patterns associated with concentration, therapy of epilepsy, headaches, attention-deficit disorder, … 31/48 Evolutionary Algorithms Cognitive Modeling – Human and Machine Learning • Evolution is a form of species learning / development • Darvin: Improve due to survival of the fittest • Lamarckism: Learned skills may be inherited • Simulated evolution performed by genetic algorithms • Population: Collection of hypotheses • Hypotheses can also be algorithms (genetic programming), neural networks, etc. • Iterative computation of successor hypotheses (generations) 1. 2. 3. 4. 5. Selection of fittest hypotheses as seed for next generation Application of operations (breeding) on individual hypotheses, e.g. random mutation, cross over, etc. Evaluation of each individual hypothesis by fitness measure Replace least-fit population with new individuals Until termination condition is met 32/48