Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Human–computer interaction wikipedia , lookup
Hubert Dreyfus's views on artificial intelligence wikipedia , lookup
Dual consciousness wikipedia , lookup
Ethics of artificial intelligence wikipedia , lookup
Existential risk from artificial general intelligence wikipedia , lookup
Intelligence explosion wikipedia , lookup
History of artificial intelligence wikipedia , lookup
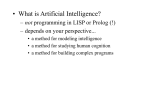
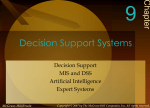
Is it possible to create a computer that mimics human intelligence by replicating the way the human brain processes information? Candidate Name: Emily Hernandez Candidate Number: 003251-016 Advisor: Jenny Levi Subject: Computer Science Date: 4 November 2011 Word Count (Abstract): 300 Word Count (Essay): 3980 003251-016 Abstract In the computer age, attempts to create artificial intelligence have fueled many technological advances. Increased processing capabilities have made it possible to design machines that can rapidly compute and make inferences from inputs. True intelligence, however, remains elusive. As neuroscience has advanced, many computer scientists have come to believe that mimicking the processing method of the human brain is the key to achieving true intelligence. Current systems, however, are not able to efficiently process the massive amounts of varied information required to achieve brain-like processing, and the search is on for a fundamentally new system. My research question is “Is it possible for scientists to replicate the way the human brain processes information in a computer system?” Before launching into a detailed study of the brain and artificial intelligence, I wanted to define artificial intelligence, brain-like intelligence, and true intelligence. Once I better understood these three terms, I sought to clarify how the brain processes information. After realizing the complexity of brain processes, I explored the history of artificial intelligence and concluded that traditional approaches to artificial intelligence seriously misinterpreted the brain’s processing system. I examined flaws in traditional approaches, and sought information on scientists making progress in the field of neuro-models of the brain’s processing system. First, I focused on Hawkins’s work to create a system that replicates the visual system of learning in the brain. As I continued looking for a complete replica of all five senses of the brain’s learning system, I discovered the work of Walter Freeman. Freeman’s holistic approach to replicating the way a rabbit brain thinks and learns led me to conclude that it is possible to replicate the human brain’s processing system. However, current limits in efficiency and the added complexity of the human brain, mean this may take significant time to achieve. 2 003251-016 Table of Contents Abstract……………………………………………………………………………………….…..2 Introduction…………….………………………………………………………………………...4 Important Definitions…………………………………………………………………………....5 Part 1: The Brain……………………………………………………………………………..….6 Part 2: The Past……………………………………………………………………………….....8 Part 3: Progress………………………………………………………………………….…...…11 Part 4: Walter Freeman……………………………………………………………….…….…14 Part 5: Present Problems………………….…………………………………..……………….16 Conclusion.…………………………………………………………………………..……….…17 Works Cited……………………………………………………………………..………………19 3 003251-016 Introduction The quest to create a human-like computer has driven artificial intelligence-seeking computer scientists for decades. This quest is not simply to prove we can accomplish this goal. Rather, it is important for applications from security monitoring to dangerous climate changes and natural disaster prediction (Hamm 92). If a computer system could process information with the level of optimal efficiency and speed that the brain does, it could simultaneously gather and process all types of sensory data, adapt as those data constantly change, and use those data to support optimal decision-making, all without placing humans in harm’s way. Attempts to achieve this goal by well-known scientists such as Minsky, Winograd, and Brooks all failed, because their basic paradigm was based on classic computer architecture: a linear processing system with separate data storage. At the time, scientists believed that the brain operated in this manner. Recent advances in brain imaging and neuroscience, however, have led to a better understanding of the unexpected ways in which the brain stores and processes information and new approaches to try to reach the goal. Despite significant effort, scientists have yet to create a computer system that possesses human-like intelligence. Is it possible for scientists to create a computer that mimics human intelligence by replicating the way the human brain processes information? As I explored the history of artificial intelligence, I developed two main knowledge objectives: 1) to better understand how the brain works; and 2) to determine why past research approaches have failed to produce the desired result. Although a complete brain-like system does not yet exist, I discovered the promising work of several scientists who have had success replicating portions of brain functions in computer systems. Based on my discoveries, I have concluded that it is possible to develop a human-like computer by replicating how the brain processes information. 4 003251-016 Important Definitions The definition of artificial intelligence (AI) has evolved over time. When the field originated, the goal of AI was to create machines that could solve problems and learn on their own (Dreyfus 40). To reach this goal, scientists employed computational learning, a process that sifts huge quantities of data through a single unit, and then presents the best answer. Scientists argued that since they had matched the way the brain represents the outside world as values, they had created intelligent computers. Unfortunately, we now know that the brain does not act like a computer’s processing unit. The brain does not store millions of facts, assign them values, and then recall the “correct” answer (Dreyfus 41). The brain does not even function in a linear way. In a system better represented by nonlinear graph theory, the brain’s neurons send signals and form synaptic connections with one another, linking axons together to learn and to continually adapt to new sensory data. The brain’s “thinking” is based on a system of continually changing flexible connections between information and experiences. To determine if we can create human-like intelligence, one must understand what the word “intelligence” means. Intelligence is not simply about choosing the correct answer to a problem. Intelligence is a predictive ability that determines how the world will change (Perlovsky 2). In simpler terms, beings with intelligence have the ability to adjust to unexpected occurrences with ideal efficiency. The brain’s ability to adapt and learn efficiently with a goal in mind clearly demonstrates intelligence (Werbos 201). General problems are analyzed and solved in the optimal amount of time (Werbos 201). At present, computers can be programmed to behave intelligently under specific conditions and to produce consistently correct and appropriate answers that require context knowledge across a range of subjects. However, if a computer system could be developed that actually processes information in the flexible and adaptive way 5 003251-016 of the human brain, it is reasonable to expect we can produce true human-like intelligence in a computer. Part 1: The Brain In order to determine whether or not it is possible to create a computer that possesses human-like intelligence, one must first understand the basic components and capabilities of the brain. Understanding the neuron is the first step to understanding the brain. A newly born neuron consists of a body. It extends arm-like projections to seek out neuron signals, also called impulses or nerve pulses. The longest projection becomes the axon and acts as the generator of impulses. The rest of the projections become dendrites, or neuron impulse receptors. (Von Neumann 45-6) Dendrite Synapses Axon Neuron 1 Neuron 2 Figure 1: Neuronal Connections (Versace) The brain has a unique communication system that shapes the way it receives and processes data. The fundamental way that neurons communicate is by tiny electrical disturbances called “spike trains” (Browne 17). A stimulation of the end of an axon begins an impulse, 6 003251-016 causing temporary chemical and electrical changes in neurons (Von Neumann 40, 45-6). The pulse generated by the axon activates links, or synapses, between other neurons (Boahen n.p.). If an impulse is successful, the disturbance spreads along axons to create a spike train (Von Neumann 41). Data processing occurs in these synapses (Versace 33), the connecting points between axons and dendrites. To form a link, axons produce “growth cones” that sense chemical trails released by active neurons. The general rule is that neurons that “fire together wire together” (Boahen n.p.). That is, in a sea of neuron signals, those that are active at the same time accept signals from each other and form synaptic connections. Once a growth cone comes in contact with a dendrite, a synapse is formed. (Boahen n.p.) Until a new stimulus creates a new connection, that link is permanent and is used as an information processing point. The organization and quick reactions of the brain play a part in its efficiency. Although the electrical components of the brain are slow-acting, the brain overcomes this barrier by activating synapses between neurons (Boahen n.p.). These high-speed connections occur 10 quadrillion (1016) times per second (Boahen n.p.). Moreover, only 10-4 seconds lapse between the arrival of one nerve pulse and the reappearance of that pulse on an axon (Von Neumann 46). Even when factoring in fatigue, the delay between when a neuron accepts one pulse and is ready to accept a new pulse is only 1.5 x 10-2 seconds (Von Neumann 46). This allows the brain to be highly adaptive to new stimuli on a continuous basis. Unless the components of the brain are closely examined, there appears to be no link between computational intelligence and brain-like intelligence. However, similarities do exist. Like binary code for a computer, nerve pulses are markers. The presence or absence of a pulse can be represented by a value, similar to the binary values 1 and 0 (Von Neumann 43-4). Each neuron accepts and emits pulses based on unique rules (Von Neumann 43-4). Sequences of 7 003251-016 impulses define specific behaviors of the nervous system (Von Neumann 70). Likewise, computer programmers input rules as sequences of computer codes to make the machine respond to different activities. Many neuroscientists believe that the brain depends on “neural codes”, or algorithms, to transform nerve impulses into thoughts, emotions, and perceptions (Horgan 38). The major flaw in this theory is that scientists have identified only a few neural codes and have not yet been able to mathematically prove this system. These few similarities, easily outweighed by numerous differences between the brain and current computer processing systems, may make it seem improbable that scientists can replicate the brain’s adaptive processing system in computers. It is clear that the brain processes information in a dynamic manner, not through a program with rigid rules. The brain’s intelligence is achieved by a flexible system that can optimally and efficiently alter itself. If scientists could create a new, non-linear computer processing system that replicates this flexible reconfiguration, then it is plausible that system would be capable of brain-like intelligence. Part 2: The Past GOFAI, good old-fashioned artificial intelligence, approaches did not work. In my opinion, this is because scientists did not base their work on an accurate understanding of how the brain processes information. For the past sixty years, computer software designed to replicate brain functions has been based on the classic Von Neumann computer architecture with separate locations for data processing and data storage. Using this system, computers can process only a fixed amount of data at any given time, and data must be transferred back and forth between storage and 8 003251-016 processing locations multiple times during the process. (Versace 33) Data Bus CPU Main memory Figure 2: Classic Von Neumann Computer Architecture (Versace) As early as the 1960s, scientists realized that the real problem was not about “storing millions of facts” (Dreyfus 41). Any processing system with a large enough memory could achieve this. Instead, the real issue was and is about common sense (Dreyfus 41). This problem, known as the frame problem, became apparent shortly after the computational learning system was devised. The frame problem asks how the computer should determine which two or three facts are relevant in a given situation when a computer can store millions of pieces of information at one time (Dreyfus 41). To try to get around this problem, Minsky attempted to organize the millions of facts into ‘frames’, or common situations. Ideally, this would have allowed the computer to organize relevant information, but all that resulted was a complicated organizational system in which a tiny variable changed the entire outcome of the situation (Dreyfus 42). The next step seemed obvious: instead of cramming the computer full of every possible situation, why not limit the number of relevant features (Dreyfus 42)? AI micro-worlds 9 003251-016 developed and appeared to effectively model knowledge. However, once these small-scale models were tested on a larger area, they failed (Dreyfus 42). The next scientist who attempted to solve this problem was Brooks. Instead of using a fixed model of the world, his robots continuously used sensors to determine movement and change in the present world (Dreyfus 44-5). While his idea did mark an advance towards brainlike intelligence, Brooks’s robots did not learn; they were simply programmed to respond to a few changing features in an advanced set of “if, then” scenarios (Dreyfus 45). Early computer scientists did not know that the human brain does not give equal meaning to everything, nor does it “convert stimulus inputs into reflex responses” (Dreyfus 47). The actions and reactions of the brain change with each new input. As a result, the same outside stimuli will not produce the same signal set in response, because the brain is constantly updating and revising its knowledge of the outside world (Horgan 37). As time progressed and more information became available about the human brain, one could see a trend of improvements towards replicating the brain’s processing system in a computer. As many computer scientists pursued new programming approaches based on new understanding of the brain’s processes, one man’s work fundamentally changed the field of artificial intelligence by shifting it away from the brain’s processes and towards behavior aspects: Alan Turing. The initiation of the Turing test was a pivotal point for the field of artificial intelligence. This test suggests that if a computer can conduct a conversation with a human without the human realizing that he or she is talking to a machine, then that computer is intelligent (Buttazzo 25). Instead of focusing on the engineering and processing systems at work in the computer, this test focuses on behavioral aspects (Hawkins 22). With the advent of the Turing test, researchers 10 003251-016 turned away from studying the brain’s processing system, focusing instead on creating humanlike behavior in computers (Hawkins 22). Interestingly, only by creating a specialized topic area of conversation has any computer been able to pass the Turing test (Buttazzo 25). For example, scientists used this idea of specialization when creating the computer Deep Blue. By applying a huge data set of rules, Deep Blue was able to analyze a chess game and find the most effective move to defeat the world champion chess player (Buttazzo 25). By evaluating around 200 million possible moves per second, Deep Blue was able to defeat Garry Kasparov by sheer force (Boahen, n.p.). Similarly, IBM’s WATSON was recently able to use very advanced algorithms to answer complex questions in real time to defeat humans at the game “Jeopardy”. However, neither system actually understands the game it plays or exhibits anything other than low-level forms of brain-like learning. Part 3: Progress After decades of failed effort, it may seem impossible that scientists will ever produce a machine with human-like intelligence. However, recent collaborative work by neuroscientists and computer scientists has led to a resurgence of efforts to reverse-engineer the brain in order to create intelligent computer systems. Many of these efforts focus on new knowledge about the processing capabilities of the cortex, the “brain region responsible for cognition” (Boahen n.p.).The neocortex makes up the majority of the cortex and is the center of intelligence (Hawkins, On Intelligence 6). The neocortical sheet is uniform; however different sections handle different functions, from vision to music, language, and motor skills (Hawkins, “Why” 22). Almost all high-level thought and perception is handled by the neocortex (Hawkins, “Why” 22). Unlike rigid coding programs of computers, the sections of the neocortex work together in one flexible algorithm (Hawkins, 11 003251-016 “Why” 22). Information travels through hierarchical structures with neurons becoming more complex as the levels increase. General information filters through each level of the neocortex and is processed into focused pieces. (Hawkins, “Why” 22) Because the neocortex thinks in terms of details and not complete objects, it can re-use knowledge. While computer systems focus on full length images for identification, the neocortex stores low level visual details in low level nodes. This allows basic characteristics to be filtered through the hierarchy of nodes until a detailed image is reached. The neocortex does not have to completely relearn an animal if it has previously seen a different animal that shares basic characteristics, such as tails or fur. (Hawkins, “Why” 22) Jeff Hawkins, a neuroscientist fascinated by the possibilities the cortex holds for intelligent machines, has created an algorithm that attempts to model the process of the neocortex. Hawkins’s Hierarchical Temporal Memory (HTM) system is unlike other computer systems in that it is not programmed. Instead, HTM is trained by exposure to sensory data, to act and learn like a young child. (Hawkins, “Why” 22) HTM attempts to imitate “the way humans process visual imagery” (Hamm 92). HTM utilizes the same hierarchical organization as the neocortex when recognizing objects. Instead of storing an object as one memory, HTM breaks apart the details into levels to piece together an image. Although the very first time an HTM system is exposed to an object, it takes substantial time and memory to learn, subsequent objects reuse knowledge gained from the first object. This allows for shorter training periods and more adaptive learning. (Hawkins, “Why” 22) Other important aspects of the HTM system are sequential pattern learning and independent learning. Just as the neocortex matches new data to previously learned systems, an 12 003251-016 HTM system can recognize patterns that it has seen before. (Hawkins, “Why” 22-3) Unlike other computer systems, HTM does not have a lead node that dictates what other nodes will learn. Each individual node adapts and changes its data as it learns, just as neurons in the brain constantly form new connections. A lead node cannot exist because the system has no way of knowing what it will learn in the future. (Hawkins, “Why” 24) Through a combination of computer science and brain research, Hawkins has effectively created a flexible system based on the brain. Although HTM does not have desires and motives as do humans, it learns in the same way as the neocortex, proving that a brain-like computer can be achieved by reverse engineering the brain. (Hawkins, “Why” 26) Hawkins’s work is important, because HTM systems have practical uses in society. Since HTM systems can make sense of data, they have applications in areas involving large data sets, such as oil drilling and drug discovery. Picture recognition is another field in which HTM systems would thrive. (Hawkins 26) Although there is no doubt that Hawkins’s system marks an incredible advance in artificial intelligence, critics have noted that his system focuses solely on the visual aspect of the brain. Without incorporating all the senses into one system, a true replica of the brain’s processing system does not exist. The field of “cognitive robotics”, devoted to making computers and artificial creations behave like humans, has also seen dramatic advances. Historically, robots have mimicked human performance, such as muscle movement and arm functions. As early as 1948, a basic form of a cognitive robot was created by Grey Walter. His robots responded to light by moving forward. RatSLAM, a flexible mapping program created later by Wyeth and Milford, is based on place cells in the hippocampus, the visual part of the cerebral cortex. By making no distinction 13 003251-016 between learning and recalling information, this navigation and mapping system can adapt to both short and long term changes. (Browne 17-18) These scientists worked with individual senses in the brain, just as Hawkins focused only on visual aspects. Although each project replicates part of the brain’s processing system, because only one of the five senses is replicated, many believe that these models are unsatisfactory and incomplete. Part 4: Walter Freeman Before I discuss the most advanced neurodynamic model of the brain, I must summarize why all previously mentioned models have failed to meet the criteria for intelligence. The infamous frame problem seeks to assign meaning to thousands of facts about the everyday world (Dreyfus 58). However, the everyday world, as humans see it, is already organized into levels of significance and relevance (Dreyfus 58). Because all prior neuro-models are based on a standard linear model, they have failed to address the frame problem and are therefore unsuccessful in replicating human intelligence (Dreyfus 58). We now know that the brain does not passively receive data and then assign meaning to it; the brain actively picks out relevant facts and binds them together to make a better representation of the world (Dreyfus 59). Because the nervous system is so complex, computer design will have to dramatically change in order to produce human-like intelligence. To this day, computers have no common sense, and instead require explicit programming (Horgan 38). Although they can perform operations much faster than the brain can, computers have no pattern recognition or visual processing skills (Boahen n.p.), with the exception of Hawkins’s recent work. Efficiency is another concern: a supercomputer with brain-like functions weighs 1000 times more and occupies 10,000 times more space than the brain (Boahen n.p.). Perhaps the biggest problem, 14 003251-016 “Today’s computers are essentially really fast abacuses. They’re good at math but can’t process complex streams of information in real time, as humans do” (Hamm 92). Basic perception is impossible for computers, because they have a narrow range of abilities, usually limited to completing one task (Hawkins, “Why” 21). Power is another serious problem. The brain operates at around 100 millivolts, while computers require close to 1 volt to function (Versace 34). The first scientist to seriously consider the idea that the brain is a nonlinear system is Walter Freeman (Dreyfus 59). “On the basis of years of work on olfaction, vision, touch, and hearing in alert and moving rabbits, Freeman has developed a model of rabbit learning based on the coupling of the rabbit’s brain and the environment” (Dreyfus 60). Freeman’s work provides a complete, multi-sense representation of an animal’s brain processing system. Because it incorporates all five senses, his work can be considered a complete model of the way the biological brain thinks and learns. Freeman proved that the brain does not detect and process meaningless data about the world. He has shown that selection of relevant features is based not on patterns, but on the brain’s past experiences. The primary desire of a being is to fulfill its needs. When a need is fulfilled, connections between neurons in the brain form and are strengthened. Each time the need is subsequently met, the neurons “fire together and wire together” to create a “cell assembly” (Dreyfus 60). As time passes and consistent sensory input occurs, cell assemblies stay wired together and act together in the future. (Dreyfus 60-61) This system avoids any frame or selection problem, because instead of focusing on detecting isolated data, the brain has cell assemblies already adjusted based on past sensory input that signal the body to complete an action (Dreyfus 61). Once again, Freeman correctly predicts that the constantly updating world 15 003251-016 means that no two experiences are ever identical (Dreyfus 64). Therefore, each action slightly modifies the processing system. Based on Freeman’s understanding of the brain, other computer scientist have worked to create a replica of the brain’s processing system. Freeman himself has programmed his model of the brain, with positive results, and his system could very well become the new paradigm for artificial intelligence systems (Dreyfus 68). Scientists Robert Kozma and Peter Erdi have also used Freeman’s model in an artificial dog that learns to run a maze (Dreyfus 73). Part 5: Present Problems Although progress has been made in replicating the processing system of the brain, significant dilemmas exist that prevent a brain-based robot from being created today. The three major problems with computers today are the efficiency problem, the power problem, and the separation of software and hardware problem. MoNETA, a more recent system designed at Boston University (Versace 32), attempts to solve both the power problem and the separation of software and hardware problem. MoNETA, Modular Neural Exploring Travel Agent, picks out important information in its surroundings to help it survive. Because it is designed after “general-purpose intelligence”, it can adapt to new environments without being retrained. Modeled after synapses in the brain, MoNETA “recognizes, reasons, and learns” without programming. (Versace 35) The components that make MoNETA successful are CPUs, GPUs, and Memristors. CPUs are flexible, neuron-like processing units. GPUs are inexpensive, rigid microprocessors that perform limited operations. Memristors are electronic devices designed to mimic the signal processing of the brain’s synapses. Like a synapse, they remember how much current has passed through them without using power. (Versace 35-6) Memristors also allow the computer to 16 003251-016 process and store data in the same place, solving a problem that has confronted scientists for decades. Ironically, one of the most exciting things about the memristor is its high failure rate. Although early in its development, the failure of a few individual memristors does not appear to affect the entire system it supports. Just as the brain’s neural network does not fail when one neuron dies, the architecture of the memristor allows for defects (Versace 35-6). If the kinks in the MoNETA system can be worked out, it will effectively co-mingle hardware and software in a processing system, making it the first to transfer, store, and process information at the same time, just like the brain. However, both the rigidity of the GPUs, based on linear algebra, and the high power need of the CPUs that are also part of MoNETA, currently make efficient operation of this system impossible. While memristors solve the power problem due to their processing method, the technology cannot yet handle the volume of processing necessary to replicate the brain’s processing system. Conclusion Based on my research, I believe that scientists will succeed in creating a computer that mimics human intelligence by replicating the way the human brain processes information. Early attempts to create human-like machine intelligence failed, because they were based on fundamental misunderstandings about how the brain works. As time progressed, computer scientists realized that their picture of how the brain organizes and processes information was too simplistic: the brain is clearly non-linear and dynamic, rather than linear. Advances in neuroscience and brain imaging technology have allowed computer scientists to better understand how the brain works. This has led to new discoveries. Three recent advances, in particular, lead me to believe that it will be possible to create a computer that mimics human intelligence by replicating the way the human brain processes 17 003251-016 information. First, Hawkin’s work replicating the visual processing system of the neocortex shows that individual senses in the brain can be duplicated in computers to create systems that exhibit childlike thinking and learning. Second, MoNETA’s memristor component indicates that computers can now process and store information in the same place while using minimal power, like the brain. Finally, Walter Freeman’s complete neurodynamic model of the brain’s way of learning and its subsequent use to produce human-like learning in a robotic dog proves that scientists can create a replica of a biological brain’s processing system. Creating a fully-functioning, human-like robot is likely still twenty years on the horizon, because scientists must resolve remaining issues associated with efficiency, power supply, and the significantly greater complexities of the human brain as compared to other biological systems. Nonetheless, I do believe that the combined and coordinated efforts of computer scientists, mathematicians (graph theorists), neuroscientists, and engineers will realize the dream of creating human-like intelligence in a machine. 18 003251-016 Works Cited Boahen, Kwabera. “Neuromorphic Microchips. (cover story).” Scientific American 292.5(2005): 56-63.Nursing & Allied Health Collection: Comprehensive. EBSCO. Web. 14 June 2011. Browne, William, Kazuhiko Kawamura, and Jeffrey Krichmar. “Cognitive Robotics: New Insights into Robot and Human Intelligence by Reverse Engineering Brain Functions.” IEEE Robotics and Automation Magazine 16.3(2009): 17-18. Applied Science Full Text. Web. 14 June 2011. Buttazzo, Giorgio. “Artificial Consciousness: Utopia or Real Possibility?” IEEE 34(2001): 24 -30. Dreyfus, Hubert. "How Representational Cognitivism Failed and Is Being Replaced by Body/World Coupling." After Cognitivism: A Reassessment of Cognitive Science and Philosophy. Ed. Karl Leidlmair. Springer: Dordrecht, 2009. 39-73. Hamm, Steve. “Building Computers That Mimic the Brain.” Business Week 4110(2008): 92. Hawkins, Jeff. On Intelligence. New York: Times Books, 2004. Hawkins, Jeff. “Why Can’t a Computer Be More Like a Brain?” IEEE Spectrum 44(2007): 20-6. Horgan, John. “The Consciousness Conundrum.” IEEE Spectrum 45.6(2008): 36-41. Perlovsky, Leonid. “Neural Dynamic Logic of Consciousness: the Knowledge Instinct.” Neurodynamics of Higher-Level Cognition and Consciousness. Ed. Leonid Perlovsky and Robert Kozma. Springer: Heidelberg, 2007. Versace, Massimiliano and Ben Chandler. “The Brain of a New Machine.” IEEE Spectrum 47(2010): 30-7. Von Neumann, John. The Computer and the Brain. New Haven and London: Yale University Press, 1958. Werbos, Paul J. “Intelligence in the brain: A theory of how it works and how to build it.” Neural Networks 22(2009): 200-212. 19