Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
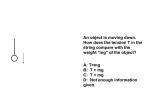
CIRCULAR DYNAMICS How Force Components Change Velocity Learning Objectives After you complete the homework associated with this lecture, you should be able to: • Explain why forces parallel to velocity change the speed of an object and forces perpendicular change its direction of motion. • State the magnitude and direction of the acceleration of an object undergoing circular motion. • Use free-body diagrams and force laws to analyze circular dynamics. C Force vector P F causes acceleration P a of mass m. C This produces a change in its velocity vector P v. C Can see effects of P F on P v by decomposing force P F into components parallel ( || ) and perpendicular ( z ) to velocity vector. 1 [©2013 RJ Bieniek] 2 [©2013 RJ Bieniek] Parallel Force Component Changes Speed Perpendicular Force Component Changes ΔPv ' (ΔPv|| % ΔPvz ) ' (Pa|| % Paz ) Δt ' ΔPv|| ' P F || m P F || m % P F z m Direction of Motion Δt P changes the "length )) of the Δt Y F || ΔPvz' P F z m P changes the direction of the velocity Δt Y F z vector, i.e. where it )s headed velocity vector, i.e. it )s speed 3 [©2013 RJ Bieniek] 4 [©2013 RJ Bieniek] Summary of Effects of Force Components C C The force component parallel to velocity P F || Some Consequences C If you apply a force parallel to the velocity vector changes the speed of the object. you can only change an object’s speed, not its The force component perpendicular to velocity P Fz direction. changes the direction in which it is headed. C If you apply a force perpendicular to an object’s velocity vector, you will change its direction of motion BUT NOT ITS SPEED ! C 5 [©2013 RJ Bieniek] 6 [©2013 RJ Bieniek] Kinematics of Circular Motion ACCELERATION COMPONENTS IN CIRCULAR MOTION If an object goes in a circular arc, the following is true irrespective of anything else: C Pv is always tangent to the path of a particle Pv will be tangent to the circular arc C The component of P a perpendicular to the velocity (P a z) equals az ' P A fine example is circular motion v2 , toward the center R of the circle 7 [©2013 RJ Bieniek] C From the properties of a circle, we can make the following inferences: 1) The velocity vector is tangent to the circular path at the position of the mass. 2) A perpendicular to tangent on a circle is directed radially toward circle’s center C Therefore: ar = az atang = a|| Note: If speed constant, a|| = 0 8 [©2013 RJ Bieniek] LASER DISC : Acceleration is toward center at uniform speed using floating cork accelerometer. Force needed is toward center (with NO such thing as outward centrifugal force). Demo Demo: inverted water-filled flask with tethered cork IMPORTANT : The magnitude of radial acceleration for an object moving at speed v in circle of radius R is given by: v2 ar ' R regardless of whether it’s changing its speed or not. C This must be generated by net radial force 3Fr directed TOWARD the center: j Fr ' m ar ' m v2 R web resource http://www.walter-fendt.de/ph11e/carousel.htm change period to 3.0 seconds, click sketch than with forces 9 [©2013 RJ Bieniek] 10 [©2013 RJ Bieniek] Car taking a flat curve with friction IMPORTANT : The acceleration component tangent to the circle changes the speed of the object. adirection Pv ' Fdir Pv m ' dv ' rate of change of speed dt To change the speed requires an Fdirection of velocity ! 11 [©2013 RJ Bieniek] R2 is where the mass would “want to go” if it were not for friction. In a radial coordinate system, R appears to want to increase even though the mass really wants to go in a straight line. This is what we identify as the centrifugal pseudo-force. Since velocity vector changes direction, friction forceP f s acts perpendicular to it, i.e., toward the center of circular motion. 12 [©2013 RJ Bieniek] Hard example: What is the maximum safe speed around a banked curve of radius R and incline θ, with road coefficient of friction µ ? j Fx ' Nx % fx % Fg x ' sum of forces in radial direc v2 ' m ax ' m ac ' m % R How many forces act on the car? 13 [©2013 RJ Bieniek] 14 [©2013 RJ Bieniek] 3Fx = Nx + fx + Fgx = max +N sinθ + (+f cosθ) + 0 = m (+v2/R) 1 eq., 3 unknowns (N, f, v) Y (Eq. 1) Need 2 more eqs. 3Fy = Ny + fy + Fgy = may +N cosθ + ( S f sinθ) + ( S mg) = m(0) = 0 v = vmax Y f = fmax = µN (Eq. 2) (Eq. 3) Y (3) into (2): N cosθ S µN sinθ= mg (3) into (1): N sinθ + µN cosθ + 0 = m (+v2/R) (4) into (5): v2 ' R N (sinθ%µcosθ) ' m N ' mg cosθ&µsinθ (Eq. 4 ) (Eq. 5) Rmg sinθ%µcosθ sinθ%µcosθ ' Rg m cosθ&µsinθ cosθ&µsinθ 15 [©2013 RJ Bieniek]