Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Rolling resistance wikipedia , lookup
Rotating locomotion in living systems wikipedia , lookup
Coriolis force wikipedia , lookup
Classical mechanics wikipedia , lookup
Mitsubishi AWC wikipedia , lookup
Centrifugal force wikipedia , lookup
Fictitious force wikipedia , lookup
Modified Newtonian dynamics wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Seismometer wikipedia , lookup
Jerk (physics) wikipedia , lookup
Equations of motion wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Mass versus weight wikipedia , lookup
Center of mass wikipedia , lookup
Classical central-force problem wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Hunting oscillation wikipedia , lookup
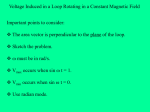
CHAPTER 10: Rotational Motion Solutions to Assigned Problems 5. 2500 rev 2 rad 1min 261.8 rad sec 260 rad sec 1min 1rev 60s (a) (b) v r 261.8 rad sec 0.175 m 46 m s aR 2 r 261.8 rad sec 0.175 m 1.2 104 m s 2 2 15. (a) The direction of 1 is along the axle of the wheel, to the left. That is the iˆ direction. The direction of 2 is also along its axis of rotation, so it is straight up. That is the kˆ direction. That is also the angular velocity of the axis of the wheel. (b) At the instant shown in the textbook, we have the vector relationship z as shown in the diagram. 44.0 rad s 2 35.0 rad s 2 12 22 tan 1 56.2 rad s 2 35.0 tan 1 38.5 2 44.0 (c) Angular acceleration is given by α 35.0kˆ rad s , α dω1 dt dω dt 2 x 1 . Since ω ω1 ω2 , and ω 2 is a constant . ω1 is rotating counterclockwise about the z axis with the angular velocity of 2 , and so if the figure is at t = 0, then ω1 1 cos 2tˆi sin 2tˆj . α dω dt d ω1 ω2 dt dω1 dt d 1 cos 2tˆi sin 2tˆj dt 12 sin 2tˆi cos 2tˆj α t 0 12 ˆj 44.0 rad s 35.0 rad s ˆj 1540 rad s 2 ˆj 0 t t 0 6.807 rad s 9.9 s 0.6857 rad s 2 25. Each force is oriented so that it is perpendicular to its lever arm. Call counterclockwise torques positive. The torque due to the three applied forces is given by the following. applied 28 N 0.24 m 18 N 0.24 m 35 N 0.12 m 1.8 m N forces Since this torque is clockwise, we assume the wheel is rotating clockwise, and so the frictional torque is counterclockwise. Thus the net torque is as follows. net 28 N 0.24 m 18 N 0.24 m 35 N 0.12 m 0.40 m N 1.4 m N 1.4 m N , clockwise 30. For each torque, use Eq. 10-10c. Take counterclockwise torques to be positive. (a) Each force has a lever arm of 1.0 m. © 2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 304 Physics for Scientists & Engineers, 4th Edition Giancoli about 1.0 m 56 N sin 30 1.0 m 52 N sin 60 17m N C (b) The force at C has a lever arm of 1.0 m, and the force at the top has a lever arm of 2.0 m. about 2.0 m 56 N sin 30 1.0 m 65 N sin 45 10 m N (2 sig fig) P The negative sign indicates a clockwise torque. 40. (a) To calculate the moment of inertia about the y axis (vertical), use the following. 2 2 2 2 I M i Rix2 m 0.50 m M 0.50 m m 1.00 m M 1.00 m m M 0.50 m 1.00 m 5.3kg 0.50 m 1.00 m 6.6 kg m 2 2 2 2 2 (b) To calculate the moment of inertia about the x-axis (horizontal), use the following. I M i Riy2 2m 2 M 0.25m 0.66 kg m2 2 (c) Because of the larger I value, it is ten times harder to accelerate the array about the vertical axis . 46. (a) The free body diagrams are shown. Note that only the forces producing torque are shown on the pulley. There would also be a gravity force on the pulley (since it has mass) and a normal force from the pulley’s suspension, but they are not shown. (b) Write Newton’s second law for the two blocks, taking the positive x direction as shown in the free body diagrams. mA : Fx FTA mA g sin A mA a FTA mA g sin A a FTA FNA y x A A mAg FTA FTB 8.0kg 9.80 m s 2 sin 32 1.00 m s 2 49.55 N 50 N mB : F x 2 sig fig FNB FTB mB g sin B FTB mBa FTB mB g sin B a y x 10.0kg 9.80 m s sin 61 1.00 m s 75.71N 2 2 B B m Bg 76 N (c) The net torque on the pulley is caused by the two tensions. We take clockwise torques as positive. F TB FTB R 75.71N 49.55 N 0.15m 3.924m N 3.9m N Use Newton’s second law to find the rotational inertia of the pulley. The tangential acceleration of the pulley’s rim is the same as the linear acceleration of the blocks, assuming that the string doesn’t slip. a I I R FTB FTB R I FTB FTB R 2 a 75.71N 49.55 N 0.15m 2 1.00 m s 2 0.59 kg m 2 © 2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 305 Chapter 10 Rotational Motion I Mk 2 MR02 k R0 49. (a) Thin hoop, radius R0 (b) Thin hoop, radius R0 , width w I Mk 2 12 MR02 121 Mw2 k (c) Solid cylinder I Mk 2 12 MR02 k (d) Hollow cylinder I Mk 2 12 M R 2 R 2 1 2 (e) Uniform sphere I Mk 2 25 Mr02 k (f) I Mk 2 121 M l Long rod, through center (g) Long rod, through end I Mk 2 13 M l (h) Rectangular thin plate I Mk 2 1 12 2 w2 1 2 R12 R22 2 5 r0 1 12 k 2 R02 121 w2 R0 k k 2 M l 1 2 1 2 1 3 l l k 1 12 l 2 w2 57. (a) The parallel axis theorem (Eq. 10-17) is to be applied to each sphere. The distance from the center of mass of each sphere to the axis of rotation is h 1.5r0 . I for one I CM Mh 2 25 Mr02 M 1.5r0 2.65Mr02 I total 5.3Mr02 2 sphere (b) Treating each mass as a point mass, the point mass would be a distance of 1.5r0 from the axis of rotation. I approx 2 M 1.5r0 4.5Mr02 2 I approx I exact 4.5Mr02 5.3Mr02 4.5 5.3 100 100 100 2 I exact 5.3Mr0 5.3 % error 15% The negative sign means that the approximation is smaller than the exact value, by about 15%. 67. The only force doing work in this system is gravity, so mechanical energy is conserved. The initial state of the system is the configuration with mA on the ground and all objects at rest. The final state of the system has mB just reaching the ground, and all objects in motion. Call the zero level of gravitational potential energy to be the ground level. Both masses will have the same speed since they are connected by the rope. Assuming that the rope does not slip on the pulley, the angular speed of the pulley is related to the speed of the masses by v R . All objects have an initial speed of 0. Ei E f 1 2 M R mA vi2 12 mBvi2 12 I i2 mA gy1i mB gy2 i 12 mA v 2f 12 mBv 2f 12 I 2f mA gy1 f mB gy2 f mB gh 12 mA v 2f 12 mBv 2f 12 1 2 v 2f R2 mA gh MR 2 mB mA h © 2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 306 Physics for Scientists & Engineers, 4th Edition Giancoli vf 2 mB mA gh mA mB 1 2 2 38.0 kg 35.0 kg 9.80 m s 2 M 2.5 m 1.4 m s 38.0 kg 35.0 kg 3.1 kg 1 2 75. Use conservation of mechanical energy to equate the energy at points A and B . Call the zero level for gravitational potential energy to be the lowest point on which the ball rolls. Since the ball rolls without slipping, v r0 . EA EB U A U B K B final U B K B CM K B rot mgR0 mgr0 12 mvB2 12 I B2 mgr0 mv 1 2 2 B 1 2 2 5 v mr B r0 F Mg R 2 R h vB 10 7 R2 R h 0 2 2 Rh R0 C y=0 B 2 2 0 g R0 r0 93. The wheel is rolling about the point of contact with the step, and so all torques are to be taken about that point. As soon as the wheel is off the floor, there will be only two forces that can exert torques on the wheel – the pulling force and the force of gravity. There will not be a normal force of contact between the wheel and the floor once the wheel is off the floor, and any force on the wheel from the point of the step cannot exert a torque about that very point. Calculate the net torque on the wheel, with clockwise torques positive. The minimum force occurs when the net torque is 0. F R h mg A F Rh R h mg R2 R h 2 Mg 2 Rh h 2 Rh 100. (a) The disk starts from rest, and so the velocity of the center of mass is in the direction of the net t force: v v 0 at v Fnet . Thus the center of mass moves to the right. m (b) For the linear motion of the center of mass, we may apply constant acceleration equations, F where the acceleration is . m F 35 N 5.5m 4.282 m s 4.3m s m 21.0 kg (c) The only torque is a constant torque caused by the constant string tension. That can be used to find the angular velocity. 0 I Fr Frt Frt 2 Ft I I 1 I mr 2 mr t t 2 The time can be found from the center of mass motion under constant acceleration. v 2 v02 2ax v 2 x v0t 12 at 2 1 2 F m x 2 t2 t 2mx F © 2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 307 Chapter 10 Rotational Motion 2 Ft mr 2F 2mx mr F 2 2 F x r m 2 0.850 m 2 35.0 N 5.5 m 21.0 kg 2 sig fig 10.07 rad s 10 rad s Note that v r since the disk is NOT rolling without slipping. (d) The amount of string that has unwrapped is related to the angle through which the disk has turned, by the definition of radian measure, s r . The angular displacement is found from constant acceleration relationships. 2mx F 2 2 Ft Ft t F 2 x 12 0 t 12 t 12 mr mr r mr s r r 2 x r 2 x 11m 103. Since there is no friction at the table, there are no horizontal forces on the rod, and so the center of mass will fall straight down. The moment of inertia of the rod about its center of mass is 121 M l 2 . Since there are no dissipative forces, energy will be conserved during the fall. Take the zero level of gravitational potential energy to be at the tabletop. The angular velocity and the center of mass v velocity are related by CM 1CM . 2 l Einitial Efinal U release K final Mg 12 l o Mg 12 l 2 12 121 M l 12 MvCM 2 v l CM 1 2 2 2 12 I CM 12 MvCM 2 2 gl 43 vCM vCM 3 4 gl © 2008 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This material is protected under all copyright laws as they currently exist. No portion of this material may be reproduced, in any form or by any means, without permission in writing from the publisher. 308