Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Hooke's law wikipedia , lookup
Hunting oscillation wikipedia , lookup
Derivations of the Lorentz transformations wikipedia , lookup
Jerk (physics) wikipedia , lookup
Fluid dynamics wikipedia , lookup
Center of mass wikipedia , lookup
Classical mechanics wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Equations of motion wikipedia , lookup
Frame of reference wikipedia , lookup
Mass versus weight wikipedia , lookup
Inertial frame of reference wikipedia , lookup
Mechanics of planar particle motion wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Seismometer wikipedia , lookup
Coriolis force wikipedia , lookup
Classical central-force problem wikipedia , lookup
Fictitious force wikipedia , lookup
Centrifugal force wikipedia , lookup
Lecture 1
In the first lecture, we will start with introducing the governing laws for the motion in the
atmosphere or the ocean for that matter. The motions of the atmosphere are governed by
the fundamental physical laws of conservation of mass, momentum and energy.
What is fluid in a mathematician’s eyes---a continuous medium, or continuum. Air
parcel or air particle is often referred to as a “point” in the atmospheric continuum.
This lecture will be about the mathematical expression (in terms of partial differential
equations) of the forces and laws---the building blocks of the atmospheric dynamics.
force
body force − − − gravitational force
surface force − − − pressure, friction
true force
⎪⎧
force ⎨
apparent
force
⎩⎪
(non-inertial frame of reference)
Newton’s Laws of Motion
First law: In an inertial frame of reference, a mass remains at rest or in uniform motion
unless compelled to change its velocity by an external force.
(inertial frame of reference is coordinate fixed in space)
Second law: ma = ∑ F
(vector sum of external forces = product of mass and acceleration)
Third law: force of action is equal and opposite to the force of reaction.
In a non-inertial frame of reference, i.e., not fixed in space, acceleration of a mass may be
thought of as the result of the sum of the true (inertial) forces plus the sum of the
“apparent” forces. Forces acting to accelerate a mass may be (i) body forces whose
1
magnitude is proportional to the mass (such as gravitational force) that may be thought of
as acting on a single point, namely the center of mass, or (ii) surface forces that act on the
surface of a mass (or across the boundary that separates of mass of fluid from its
environment) whose magnitudes are independent of the mass.
Note: If we define momentum as p = mv and acceleration is a ≡ dv / dt , the second law
may be written as
dp
dp
= ∑ F and the first law becomes
= 0 . The latter is just the
dt
dt
statement of conservation of momentum when external forces are zero.
Fundamental forces
1) Gravitation
2) Pressure gradient
3) Friction
Apparent forces
1) Centrifugal
2) Coriolis
3) Gravity
2
FUNDAMETNAL FORCES
Gravitational force
GMm ⎛ r ⎞
FMm = − 2 ⎜ ⎟ = mg*
r ⎝ r⎠
with
G = 6.673 × 10 −11 Nm 2 kg −2 measured in laboratory
M E = 5.988 × 10 24 kg mass of Earth
a = 6.37 × 10 6 m mean Earth radius
For typical mass of air on Earth, distance from center of Earth is a + z ( z = altitude
above surface) where 0 ≤ z < 10 5 m .
For z = 0 , g*0 =
GM
= 9.81 ms −2 .
a2
3
For z ≠ 0 , g* =
GM
GM
g*0
= 2
=
≈ g*0 (1 − 2z / a) .
2
2
(a + z)
a (1 + z / a)
(1 + z / a)2
So g* is reduced by 1% for each 32km above the surface and we may treat it as a
constant for the purposes of this course.
Exercise: Can we figure out the mass of the Earth, assuming the universal constant G is
known?
Pressure gradient force
Consider an infinitesimal volume of air, δV = δ xδ yδ z , centered at the point ( x0 , y0 , z0 ) as
illustrated in Figure 1.1 below. (The atmosphere is made of tiny cubes---Cartesian
coordinates)
4
δV = δ xδ yδ z
p(x0 , y0 , z0 ) = p0
∂p δ x
pA = p0 +
+
∂x 2
∂p δ x
pB = p0 −
+
∂x 2
∂p δ x
)δ yδ z
∂x 2
∂p δ x
FBx = ( p0 −
)δ yδ z
∂x 2
FAx = −( p0 +
∂p
δ xδ yδ z
∂x
∂p
= − δ xδ yδ z
∂y
∂p
= − δ xδ yδ z
∂z
Fx = FAx + FBx = −
Fy
Fx
F
F Fy F
acceleration = force / mass = = ( x , , z )
m
m m m
⎛ 1 ∂p
1 ∂p
1 ∂p ⎞
1
= ⎜−
,−
,−
= − ∇p
ρ ∂y
ρ ∂z ⎟⎠
ρ
⎝ ρ ∂x
Note that this force is proportional to the gradient of the pressure field, not the pressure
itself.
5
Viscous force
Empirical fact: the force tangential to the upper plate required to keep it in uniform
(steady) motion is proportional to the area A, the velocity u0 , and the inverse of the
distance separating the plates l.
F = µ Au0 / l
where µ is a constant called dynamic viscosity.
Since the motion is steady (
du
= 0 ), for every thin horizontal layer of fluid of depth δ z ,
dt
the force imposed on it from above must be exactly the same as the force from below,
and which can be all the way traced back to F = µ Au0 / l . This may be expressed in the
form F = µ Aδ u / δ z where δ u = u0δ z / l is the velocity shear across the layer δ z .
The shear stress is defined as viscous (surface) force per unit area (unit=N/m2)
6
τ zx = lim µ
δ z→0
δu
∂u
=µ
δz
∂z
where subscripts indicate the component of the shearing stress in the x direction due to
the vertical shear (in z direction) of the x velocity component.
From the molecular point of view, the shearing stress results from a net downward
transport of momentum by the random motion of the molecules. And the shearing stress
is equivalent to the net downward momentum flux per unit time per unit area.
For the simple 2-dimensional steady-state motion illustrated in Fig. 1.3, the net viscous
(body) force (in units of N per unit mass) acting on the elements of fluid is zero, because
the shearing stress acting across the top boundary of each fluid element is just equal and
opposite to that acting across the lower boundary.
(Caution: distinguish between force and stress; between viscous surface force and viscous
body force.)
7
For general conditions, the stress acting across the upper boundary (a z-surface) on the
fluid below can be written as
τ zx +
∂τ zx δ z
∂z 2
while the stress acting across the lower boundary on the fluid above is
∂τ δ z ⎤
⎡
− ⎢τ zx − zx ⎥
∂z 2 ⎦
⎣
(This is just the opposite of the stress acting across the lower boundary on the fluid
below.) The net viscous force due to shear stress on the fluid element:
∂τ zx δ z ⎤
∂τ zx δ z ⎤
⎡
⎡
⎢⎣τ zx + ∂z 2 ⎥⎦ δ xδ y − ⎢⎣τ zx − ∂z 2 ⎥⎦ δ xδ y
Dividing this expression by the mass δV = δ xδ yδ z , we find the viscous force per unit
mass due to vertical shear of the x-component of motion is
1 ∂τ zx 1 ∂ ⎛ ∂u ⎞
=
⎜µ ⎟
ρ ∂z
ρ ∂z ⎝ ∂z ⎠
If µ is constant, we can write
8
1 ∂τ zx
∂2u
=υ 2
ρ ∂z
∂z
υ = µ / ρ is the kinematic viscosity = 1.46 × 10 −5 m 2 s −1 for standard atmosphere at sea
level.
The same derivation applies in y- and z-directions and x- y-surfaces.
COLA IGES
Comment: End of lecture 1
⎛ ∂2u ∂2u ∂2u ⎞
Frx = υ ⎜ 2 + 2 + 2 ⎟
∂y
∂z ⎠
⎝ ∂x
⎛ ∂2 v ∂2 v ∂2 v ⎞
Fry = υ ⎜ 2 + 2 + 2 ⎟
∂y
∂z ⎠
⎝ ∂x
⎛ ∂2 w ∂2 w ∂2 w ⎞
Frz = υ ⎜ 2 + 2 + 2 ⎟
∂y
∂z ⎠
⎝ ∂x
For the atmosphere below 100km, υ is so small that molecular viscosity is negligible
except in a thin layer within a few centimeters of the earth’s surface where the vertical
shear is very large. Away from this surface molecular boundary layer, momentum is
transferred primarily by turbulence (as discussed in Chapter 5 of Holton).
Exercise: Derive the viscous forcing in the x, y, z directions using the illustration below
as a guide
9
10
APPARENT FORCES
1. Centripetal acceleration and centrifugal force
Apparent forces occur to the equation of motion, due to non-inertial frame of reference.
The coordinate system of choice for meteorology is one that is fixed w.r.t. Earth The
coordinate system rotates itself and a parcel is at rest w.r.t this coordinate is under
acceleration. Therefore, the geocentric reference frame is non-inertial.
If we fix the coordinate system on the Earth and assume the rotation rate is uniform, two
apparent forces (centrifugal force and Coriolis force) enter into the inertial picture we
have already considered. To understand this system, we consider a simple system, that is,
a ball of mass m is attached to a string and whirled through a circle of radius r r at a
constant angular velocity ω .
Viewed from a fixed/inertial coordinate:
11
dθ
dt
V1 = V2 = V
ω=
δ V = δθ V
δV
δθ
= V
δt
δt
acceleration = lim
δ t →0
δV
dθ
r
= V
in direction towards the center of circle, i.e., − .
δt
dt
r
Now substitute ω =
dθ
and V = ω r , so
dt
dV
r
= (ω r)(ω )(− ) = −ω 2 r
dt
r
This well-known acceleration is called centripetal acceleration as perceived from fixed
inertial coordinate. Observed from a system rotating along with it (as you are riding a
merry-go-round), the ball is stationary and the force exerted by the string ( fr ) is balanced
by a centrifugal force (the force you feel on a rotating Mary-Go-Round), which is just
equal and opposite to the centripetal acceleration.
Inertial:
dV
r
= (ω r)(ω )(− ) = −ω 2 r = fr
dt
r
Non-inertial:
dVr
= 0 = fr + ω 2 r
dt
2. Gravity force
To simplify what comes next, we group together the fundamental gravitational force and
the centrifugal force and refer to the resultant as the gravity force.
Fundamental gravitational: g* =
GM
(a + z)2
12
Centrifugal force: Ω2 R
Gravity force: g ≡ −gk ≡ g* + Ω2 R
Note that now g is no longer pointing toward the center of the Earth (but perpendicular
to the local vertical). If the material that forms the earth has no resistance to flow, the
earth should adjust its surface till it ⊥ g . In particular, mass will deform to push the
surface away from the center near the equator and towards the center near the poles
oblate spheroid. The oblateness is about 21 km/6370 km, or ~1/300.
One can define a potential function Φ in such a way that
g = −∇Φ
and since g is parallel to the local vertical, g =
dΦ
, We can integrate this equation w.r.t.
dz
z , assuming Φ = 0 at mean sea level, so
Φ=
∫
z
0
g dz
13
equals work required to lift a unit mass to height z from the mean sea level. Φ is called
geopotential and is a function of z only.
3. Coriolis force and the curvature effect
Fig. Merry-go-round
Movie – Merry-go-round
14
Returning to merry-go-round example—disk rotating at uniform rate ω with Alice sitting
at point A and Bob at point B. In the rotating frame of reference, Alice and Bob perceive
each other to be at rest. Suppose Alice throws a ball at Bob. She will throw the ball
straightly towards Bob, but while the ball is in the air, the merry-go-round turns
underneath it. In an inertial frame of reference, the velocity vector of the ball is resultant
of the velocity of the point A at the moment of the throw ( Vr ) plus the velocity of the
throw itself, Vt . Thus the ball’s velocity in the inertial frame is to the right of the line AB. In addition, during the flight of the ball, the merry-go-round turns so that B is no
longer in the same direction w.r.t. an inertial frame. The ball in fact follows a curved
path---turning to the right in the rotating frame. In the rotating frame, we must posit a
force that apparently deflects the motion by acting at a right angle to the velocity vector.
Since the force is ⊥ to the motion, FCOR ⋅ V = 0 so Coriolis force can only change the
direction of motion, not its speed (so it does not do any work).
Mathematical form of Coriolis force
Zonal component of Coriolis force---Conservation of angular momentum
15
Now consider particle in spherical coordinate system.
Meridional displacement: δ y
δ y = aδφ
R = a cos φ
δ R = −a sin φ δφ
Vertical displacement: δ z
δ R = cos φ δ z
16
Angular momentum conservation states that: Initial zonal velocity Vi times the initial
distance from axis of rotation R equals final zonal velocity V f times final distance from
axis R + δ R , i.e,.
Vi Ri = V f R f
The velocity viewed from the inertial frame:
Initial: Vi = ΩR + u
Final: V f = Ω(R + δ R) + (u + δ u)
Solve for δ u :
u
δ R2
δR
δR − Ω
− δu
R
R
R
u
≈ −2Ωδ R − δ R
R
δ u = −2Ωδ R −
Thus,
δu
δR u δR
= −2Ω
−
δt
δt R δt
If the displacement only occurs in meridional direction:
δR
δφ
δφ
δR
;a
= −a sin φ
= v;
= −vsin φ
δt
δt
δt
δt
uv
⎛ du ⎞
then ⎜ ⎟ = 2Ωsin φ v + tan φ
⎝ dt ⎠
a
If the displacement takes place only in the vertical direction:
δR
δz δz
;
= cos φ
=w
δt
δt δt
17
uw
⎛ du ⎞
then ⎜ ⎟ = −2Ω cos φ w −
⎝ dt ⎠
a
For arbitrary displacement ( δ y, δ z ):
δR
δφ
δz
= −a sin φ
+ cos φ
δt
δt
δt
du
uv
uw
= 2Ωsin φ v − 2Ω cos φ w + tan φ −
dt
a
a
(1.10)
Meridional and vertical component of Coriolis force
Now consider an object that is set in motion in the eastward direction. Because the object
is rotating faster than the earth, the centrifugal force on the object will be increased. The
excess of the centrifugal force over that for an object at rest is
2
u⎞
2ΩuR u 2 R
⎛
2
+ 2
⎜⎝ Ω + ⎟⎠ R − Ω R =
R
R
R
The terms on the r.h.s. represent deflecting forces, which act outward along the vector R.
18
Taking meridional and vertical component of R, one yields
u
⎛ dv ⎞
⎜⎝ ⎟⎠ = −2Ωu sin φ − tan φ
dt
a
2
u
⎛ dw ⎞
⎜⎝
⎟ = 2Ωu cos φ +
dt ⎠
a
2
For synoptic scale motions, u ΩR , w u ,
⎛ dv ⎞
⎜⎝ ⎟⎠ = −2Ωu sin φ = − fu
dt Co
⎛ du ⎞
⎜⎝ ⎟⎠ = 2Ωv cos φ = fv
dt Co
where f ≡ 2Ωsin φ is the Coriolis parameter.
⎛ dw ⎞
⎜⎝
⎟ gravitation change the apparent weight slightly, depending on whether
dt ⎠ Co
the parcel is moving eastward (lighter) or westward (heavier). For large scale synoptic
motions, this term is usually negligible.
We now have
⎛ du ⎞
⎜⎝ ⎟⎠ = 2Ωvsin φ − 2Ωw cos φ
dt Co
⎛ dv ⎞
⎜⎝ ⎟⎠ = −2Ωu sin φ
dt Co
In the Northern Hemisphere, deflection is to the right of the motion:
19
In the southern hemisphere, deflection is to the left of the motion.
Coriolis force and Curvature effect---A 2-dimensional perspective:
a. Movement in EW-direction u induced centrifugal force: FCF
Fig. 1A Forces due to u-component
20
at rest: FCF = Ω2 R
2
u⎞
u2
⎛
at motion: FCF = ⎜ Ω + ⎟ R = Ω2 R + 2Ωu +
⎝
R⎠
R
The extra CF force:
FyR = −2Ωu −
u2
R
where the first term is the Coriolis force acting in y direction; the second term is part of
the curvature effect on the forces in y-direction.
b. Movement in radial direction conservation of angular momentum
Fig. 1B Forces due to v-component
u⎞
⎛
Initial: M I = ⎜ Ω + ⎟ R 2
⎝
R⎠
21
u + δu ⎞
⎛
2
Final: M F = ⎜ Ω +
⎟ (R − δ R)
⎝
R − δR⎠
Angular Momentum conservation:
MI = MF
⇒ ΩR 2 + uR = ΩR 2 − 2ΩRδ R + Ωδ R 2 + (u + δ u)(R − δ R)
⇒ 0 = −2ΩRδ R + Ωδ R 2 − uδ R + δ uR − δ uδ R
δR
⇒ δ u ≈ 2Ωδ R + u
R
Force in u-direction:
Fx = lim
δ t →0
δu
u⎞
⎛
= vr ⎜ 2Ω + ⎟ ,
⎝
δt
R⎠
where vr =
dR
.
dt
Together, we have
u⎞
⎛
Fx = vr ⎜ 2Ω + ⎟ , which is 0 if vr is 0
⎝
R⎠
u⎞
⎛
FyR = −u ⎜ 2Ω + ⎟ , which is 0 if u is 0
⎝
R⎠
22
B. On a sphere-3D:
Fig. 1C Forces due to v-component
Identity:
R = a cos φ
vr = vsin φ − w cos φ
For the x-component: simply apply the identity above to Fx
⎛
u ⎞
Fx = ⎜ 2Ω +
( vsin φ − w cos φ )
⎝
a cos φ ⎟⎠
For the y- and z-components, project Fx onto y- and z-direction.
⎛
u ⎞
Fy = FyR sin φ = − ⎜ 2Ω +
u sin φ
⎝
a cos φ ⎟⎠
⎛
u ⎞
Fz = −FyR cos φ = ⎜ 2Ω +
u cos φ
⎝
a cos φ ⎟⎠
This is the same as eqn (1.11) in Holton.
23
In vectorial form,
FCo = − fk × VH
Structure of the Static Atmosphere
Ideal gas law: Thermodynamic variable—pressure, density, temperature—are related to
each other by equation of state:
p = ρ RT
pα = RT (α ≡ ρ −1 )
or
R
is gas constant, = 287 J kg-1 K-1 for dry air
Hydrostatic ‘law’: For atmosphere at rest, motion=0 and acceleration=0, so all external
forces must be in balance. Thus, vertical component of pressure gradient
force must be equal and opposite to gravity force:
−
1 dp
=g
ρ dz
hydrostatic balance
Multiplying by ρ and integrating with altitude:
24
p(z) =
∫
∞
z
ρ g dz
Using the definition of geopotential ( ∇Φ = −gk ), dΦ = −gdz , and noting that pα = RT
dΦ = −gdz = −
1 dp
RT
dz = −α dp = −
dp = −RTd ln p
ρ dz
p
Integrating gives
∫
z2
z1
p2
p1
p1
p2
dΦ = −R ∫ T dln p = R ∫ T dln p
or
p1
Φ(z2 ) − Φ(z1 ) = R ∫ T dln p
p2
Define geopotential height Z = Φ / go
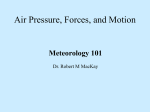
Thickness: ΔZT ≡ Z 2 − Z1 =
R
go
∫
p1
p2
T dlnp
Where ΔZT is the thickness of the atmosphere layer between the pressure surfaces p2
and p1 .
25
(adopted from Marshall and Plumb, 2008)
Defining a layer mean temperature
T =
p1
∫ p2 T dln p ⎡⎢⎣ ∫ p2 dln p ⎤⎥⎦
p1
−1
and a layer mean scale height H ≡ R T / g0 , we have
ΔZT = H ln( p1 / p2 )
Thus the thickness of a layer bounded by isobaric surfaces is proportional to the mean
temperature of the layer. Pressure decreases more rapidly with height in a cold layer than
in a warm layer. It also follows immediately that in an isothermal atmosphere, the
geopotential height is proportional to the natural logarithm of pressure normalized by the
surface pressure,
26
Z = −H ln( p / p0 )
where p0 is the pressure at Z = 0 . Thus in an isothermal atmosphere the pressure
decreases exponentially with geopotential height by a factor of e−1 per scale height.
Q: what is the structure of density in an isothermal atmosphere?
Pressure as a Vertical Coordinate
Since monotonic relationship exists between pressure and height, one could use pressure
as the independent vertical coordinate and height as a dependent variable. With the aid of
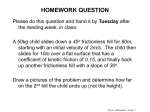
Fig. 1.11, we evaluate partial differentiation holding pressure constant.
Considering only the x, z plane, we see from Fig.1.11 that
⎡ ( p0 + δ p) − p0 ⎤ ⎡ ( p0 + δ p) − p0 ⎤ ⎛ δ z ⎞
⎢⎣
⎥⎦ = ⎢⎣
⎥⎦ ⎜⎝ δ x ⎟⎠
δx
δz
z
x
p
Taking limit, we get
27
⎛ ∂p ⎞
⎛ ∂p ⎞ ⎛ ∂z ⎞
⎜⎝ ⎟⎠ = − ⎜⎝ ⎟⎠ ⎜⎝ ⎟⎠
∂x z
∂z x ∂x p
Note the minus sign is included because δ z < 0 for δ p > 0 .
The pressure gradient term in z -coordinate can be expressed as, after substitution from
the hydrostatic equation,
1 ⎛ ∂p ⎞
⎛ ∂z ⎞
⎛ ∂Φ ⎞
− ⎜ ⎟ = −g ⎜ ⎟ = − ⎜
⎝ ∂x ⎠ p
⎝ ∂x ⎟⎠ p
ρ ⎝ ∂x ⎠ z
Similarly,
⎛ ∂Φ ⎞
1 ⎛ ∂p ⎞
− ⎜ ⎟ = −⎜
⎝ ∂y ⎟⎠ p
ρ ⎝ ∂y ⎠ z
Density no longer appears explicitly in the pressure gradient force.
Generalized Vertical Coordinate
Any function of height s(z) may be used to mark off the vertical dimension if and only if
it is single-valued {∀z, s(z1 ) = s(z2 ) ⇒ z1 = z2 } and
monotonic { EITHER z1 > z2 ⇒ s(z1 ) > s(z2 ) OR z1 > z2 ⇒ s(z1 ) < s(z2 )} . This is also
true for any such function of pressure due to the fact that the hydrostatic law ensures that
p is single-valued, monotonic w.r.t. z .
Consider a candidate vertical coordinate s(x, y, z,t) with the above properties.
28
Suppose pressure at points A , B and C is pA , pB and pC . Making use of the trick
pC − pA = pC − pB + pB − pA , then
pC − pA pC − pB δ z pB − pA
=
+
δx
δz δx
δx
In the limit δ x, δ z → 0 ,
Now
∂p ∂p ∂s
, so
=
∂z ∂s ∂z
∂p
∂p ∂z
∂p
=
+
∂x s ∂z ∂x s ∂x
z
∂p
∂p
∂s ∂z ∂p
=
+
∂x s ∂x z ∂z ∂x s ∂s
These identities will be used to derive the equation of motion in sigma vertical
coordinate.
Note that if s = p ,
∂p
∂p
∂p ∂z
=
+
∂x p ∂x z ∂z ∂x
=0
p
Using the hydrostatic assumption,
∂p
∂p ∂z
=−
∂x z
∂z ∂x
= ρg
p
∂z
∂x
=ρ
p
∂Φ
∂x
COLA IGES
Comment: End of lecture 2
p
29