Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Nordström's theory of gravitation wikipedia , lookup
History of electromagnetic theory wikipedia , lookup
Aharonov–Bohm effect wikipedia , lookup
Electrical resistance and conductance wikipedia , lookup
Speed of gravity wikipedia , lookup
Field (physics) wikipedia , lookup
Electromagnet wikipedia , lookup
Anti-gravity wikipedia , lookup
Lorentz force wikipedia , lookup
Superconductivity wikipedia , lookup
Electromagnetism wikipedia , lookup
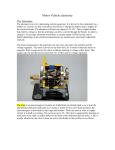
The Online Journal on Power and Energy Engineering (OJPEE) Vol. (3) – No. (1) 200% to 1100 % Increasing Power Generator Rawash Hamza Communications Department, Cairo University Egyptian Relativity Group (ERG) 36 Abd Alhameid Abd Rabu st, West Mounera, Imbaba, Giza, 12421 [email protected] Abstract-The paper gives a new method of increasing generator’s power through application o f Finsler geometry (two approaches on a sample generator (data reference)). Two times voltage increasing& 1.5 times current increasing and 3 times power increasing with efficiency increasing to 200% (normal model) were recorded in 1st approach, another turbine must be installed on free stators; stator and rotor turbines must be rotated at same time in different directions. 4 times voltage increasing & 3 times current increasing and 12 times power increasing with up efficiency increasing to 1100% (super model) were recorded in 2nd approach, achieving that can be done by moving three coils inside each other, inner and outer coils turbines must be rotated in an opposite direction of medium turbine rotation. Temperature decreasing was recorded in these approaches; it can be referred to magnetic field increasing with current increasing and resistance decreasing. Key words:-generator, Berwaled-Moor metric, resistance, magnetism. II. FINSLER GEOMETRY AND MAGDAFE MAGDA is considered normal extension of MAG (Maxwell Analogy Gravity) theory (Thierry De Mees in 2003) and mirror of Murad & Bakr approach. Electromagnetic field in MAGDA will be mirror of a gyrotation field in MAG theory and spinning field in Murad& Bakr approach. MAGDA was addressed through FERT (Cairo- 2008) and PIRT (Moscow -2009) to explain MAGDA FE and EFE (Einstein field equation) relation [1], then going to Berwaled – Moor metric which can be reduced to two of EFE with two orthogonally fields and also, EFE can be reduced to MAGDAFE, which can be considered relativistic form of Lorentz force equation or as force with its induction effect; these relations will be discussed in detail in the Appendix. III. ELECTRIC MAGDA GENERATOR (EMAGDAG) The process will be discussed on theoretical ideas to create a modified generator. I. INTRODUCTION Generator’s power increasing is a big need; many trials were done for improving actual generator’s fabrication parameters to gain more power, according to Lorentz force equation "Force = q × V0 × B" (turbines shape& coil turns& magnetic flux and rotor velocity), can be reviewed here q = electron charge& V0 = rotor velocity and B = magnetic flux density. The purpose here, is introducing a new idea through an application of Finsler geometry for producing a friendship power environment source. Berwaled- Moor metric (connection type of Finsler geometry) was adjusted to be general MAGDA (Maxwell Analogy Gravity Different Aspects) force equation (MAGDAFE), it will be explained in sec 2. To apply this idea, two dual fields (electric and magnetic fields) must be moved in an opposite directions (with each other) using suitable turbines. Stators must be positioned free with other turbine on it, relative velocity will be double of original velocity, magnetic field will be increased, 3 times output power were recorded, comparing with same generator without such changes, it means 200% efficiency increasing in electric MAGDA generator (EMAGDAG), it will be discussed in sec3. Extending such idea will be applied on 3 coils, 12 times as output power will be recorded; it means 1100% efficiency increasing in super electric MAGDA generator (SEMAGDAG), its discussion in sec4. Critical temperature will be discussed in sec 5. Reference Number: JO-0010 Figure (1): Electric MAGDA generator (EMAGDAG) = sample after modification) In Figure 1, the above invention requires an additional turbine on free opposite direction stator with rotor motion. Coil A and its arrow represent rotor and turbine direction, coil B and its arrow represent free stator and turbine direction, electric box with required brushes/rings represent transferring electricity to out. Explanation will be done through 3 views, in the 1st, MAGDA looks to electric motor motion as orthogonally result between electric and magnetic fields (spinning type). Electric power can be produced by moving one inside other one [2]. V 2 V 2 (1) F = A 1 × 1 − 1 + A 2 × 1 − 2 c c Equation (1) is a generalized MAGDA force equation, If A1= q x E, A2 = P x H, V1 = V2 = V0, then Eq. (2) will be gained. V0 2 (2) F = (q × E + P × H )× 1 − c 257 The Online Journal on Power and Energy Engineering (OJPEE) V0 2 F = (q × V0 × B(rotor ) + q × V0 × B(stotor ))× 1 − c (3) V0 2 If B(rotor ) = B(stotor ) F = 2 × q × V0 × B × 1 − c (4) V0 Actually c neglected. 2 will be too small then its value can be Net electromagnetic force = F = 2 × q × V0 × B (5) nd In the 2 , starting with Lorentz force equation, generator power can be deduced [3]. F = q × (E + (V0 × B)) → output power F × r × t = m × V0 × r → angular momntum (6) (7) → rotation or spinning E = electric field, t = time, r = distance to force center, m = rotating (spinning) mass, F = force, Magnetic field existence is essentially in equations Eq. (8-13), for motor "F = q × E + q × V0 × B" and for generator "F=q × V0 × B + q × E". Vol. (3) – No. (1) In Figure 2, blue curves, (a curve for voltage with value V and b curve for current with value = I) represent status of stator /rotor motion (sample generator without modification) black curves (c curve for voltage with value= 2V and d curve for current with value= 1.5I) represent status of stator and rotor movement on generator after modification in equal speed of both rotor /stator). 3 P(n ) = V(n )× I(n )× p.f = 2 × V(o )× × I(o ) \ 3 × p(o )× p.f (13) 2 (14) P(n ) = 3 × p(o ) (in case of p.f = 100%) n = stator and rotor, o = rotor, p = power, V = voltage, I = electric current, p.f = power factor, experiments were done in steps (voltage= V & I = current and P = power), 1st we move rotor with speed = V0, V& I and P as output values were be recorded, 2nd we move stator (only) with speed = V0, V& I and P as output values were be recorded, 3rd we move at same time rotor and stator with the same speed = V0, 2 × V& 1.5 × I and 3 × P as output values were be recorded, 4th we move with different speeds (V1 & V2 ) both of rotor and stator, leads to 2 × V ≥ voltage ≥V & 1.5_ I ≥ current ≥ I and 3_ p ≥ output power ≥ p. (8) E(rotor ) = E(max )× sin (θ) Due to opposite direction of stator motion w.r.t rotor motion, a modified generator will be treated as two connected generators. E(rotor and stator ) = E(max )× sin (2θ) E(rotor and stator ) = 2 × E(max )× sin (θ)× cos(θ) (9) (10) Equation (10) expresses about output voltage of both rotor and stator motion, E (rotor = voltage wave due to rotor motion, E (max) = max voltage, E(rotor and stator) = voltage wave due to rotor and stator movement. In the 3rd, starting with electromagnetic force "F = q × V0 × B” and with rotating stator turbine and rotor turbine at time in opposite directions [4]. Net relative velocity = V0 − (− V0 ) = 2 × V0 (11) Net electromagnetic force = 2 × q × V0 × B (12) Voltage difference increasing by 100% & current increasing by 50% & output electric power increasing by 200% and intrinsically coil cooling were recorded, output power = coil edges voltage × current (loads on coil). Figure (3): Voltage-current relation (samples with different velocities). In Figure 3, there are two cases, 1st will be for load case, voltage current relation is not linear, current change is faster > voltage change on 1 & 2 and 3 curves, possibility of zero resistance will be expected. 2nd will be for load case, voltage current relation is not linear and current change is < voltage changes, current is ≅ const. at 6.1 m ampere while voltage is changing on 4 and 5 curves, all curves will be referred to different samples with different speeds (gradually). IV. SUPER ELECTRIC MAGDA GENERATOR (SEMAGDAG) Let us have three coils A& B and C; all coils are free (not fixed). Coil B will be moved between rotated coils A and C, they will be rotated anti clock wise direction (same direction of rotating around Kabba (Muslims praying direction)), coil B will be rotated in an opposite direction of rotating around Kabba (clock wise direction). Figure (2): Output sin wave voltage (current) diagram with θ (angle) Reference Number: JO-0010 258 The Online Journal on Power and Energy Engineering (OJPEE) Vol. (3) – No. (1) Figure (4): Super MAGDA generator (SEMAGDAG) 3coils rotates inside each other. In Figure 4, invention idea requires that coil A and coil C rotate in an opposite direction w.r.t coil B rotation direction, SEMAGDAG consists of coils A and C (inner& outer) & coil B (medium) represent and electric box with required brushes and rings (for electricity out), Results were recorded in following table with comparing of normal generator (case N0.1). coil No A 1 fix 2 mob 3 fix 4 mob 5 mob coil coil V I R P P B C V I R P H mob V I R P H mob 2×V 1.5×I F(R) 3×P F(H) mob fix 2×V 2×I F(R) 4×P F(H) mob fix 3×V 2.5×I F(R) 7.5×P F(H) mob mob 4×V 3×I F(R) 12×P F(H) T T T F(T) F(T) F(T) F(T) Table (1): It describes all the statues of 3 coils (rotating inside each other). Case N0.1 represent generator without our changes and case N0.2 was discussed in the previous section as EMAGDAG, (mob ≡ mobile). In case N0.3, electric coils will be rotated between two fixed magnetic coils, it will be considered as two connected generators with same c/c's, each one has output voltage = V and output current = I, total output will be 2 × V in voltage and 2 × I in current, (electric coil ≡ coils for transferring electricity and magnetic coils for magnetic creation). In case N0.4, electric coils will be rotated between one fixed magnetic coil and rotated magnetic coil in opposite directions, it will be considered as two connected generators (same c/c's), one will be similar to case N0.2 with an output voltage = 2 × V and output current = 1.5 × I, the other one will be similar to case N0.1, total output power will be = 3 × V in voltage and =2.5 × I in current. In case N0.5, between two rotated magnetic coils an electric coil will be rotated with opposite directions, it will be considered as two connected generators (the same c/c’s), both of them will be considered as case N0.2 with output voltage= 2×V and output current = 1.5 × I for each one, total output will be 4 × V in voltage and 3× I in current. In above table magnitude of F(R) will be < R & magnitude of F (H) will be > H and magnitude of F (T) will be T, F(R) & F (H) and F (t) are nonlinear functions of R & H and T in sequence. Reference Number: JO-0010 Figure (5): 5 modes of coils A&B and C according previous Table Figure 5 expresses about H (magnetism) changing of H where volume change leads to electric current creation by induction effects (A → B coils) and (C →B coils), volumes of magnetic field will be observed from up down up down [5, 6]. In Figure 5, each point on curves will be mirror of case in previous Table from No.1toNo. 5, (V-I) or (P-I) curves change from case to other will be edge of understanding effect of magnetic volume change. V. DISCUSSION MAGDA explains motor and generator from field criteria, space magnetic field change ≡ space distortion, by rotor motion (generator) will create electric field (time distortion), it will force free electrons in rotor’s coil to be moved in a specific direction, while change in magnetic field was increased, created electric field will be increase by induction, vice versa of this process will be for motor (F = electromagnetic force). To increase output generator's power, rotor speed must be increased, but rotor coils will suffer from high temperature with damage possibility. In EMAGDAG, output power increased, while rotor’s temperature was decreasing, why [7]? V.1 H-R explanation Stator’s motion will lead to gain induction current which will be added to original one (with ratio), resistance will have gotten illusion increasing with ratio because magnetic field will be cut through two ways from rotor’s motion and from stator’s motion. Increasing of voltage difference on coil edges will be explained on decreasing of resistance which means that magnetic field movement during passive electric field motion will lead to some actions, more free electrons were rearranged in specific direction, free new electrons by breaking its bond with nuclei will be done in sequence, after that clearing of kinetic energy from bonded electron, stopping of electron's rotation then its spinning [8]. Next clearing will be in its potential energy with nuclei will be done; this will be cause of increasing electrons per second i.e. increasing in current due to difference in voltage. 259 The Online Journal on Power and Energy Engineering (OJPEE) V.2 A. D. Sakharov (volume change) A. D. Sakharov generator idea application [9] current increasing /resistance decreasing will be explained on magnetic field movement, magnetism will be increased gradually with time at specific space point [10], A . D. Sakharov (Soviet Union nuclear physicist, in 1951 he invented and tested the 1st explosively pumped flux compression generator, compressing magnetic fields by Explosive material). H(s, t )1 = H(s, t ) 0 + δH(s, t ) (15) H = magnetic field intensity, (s, t) = space – time, (s,t) distortion will takes some time to be released (mirror of capacitors recharging), then new distortion will be added… and so on, it was recorded in Eq. (15), it will be observed by specific generator‘s parameter and " relative velocity ≡ V(rotor) – (– V(stator))". Another view, volume changes between stator and rotor during relative motion will create induction current; automatically it will be appeared as an increasing in magnetic field. Simultaneously, obstacles of free electrons will be decreased, current increasing with resistance decreasing. Vol. (3) – No. (1) energy for electrons moving. This will be a case until edge point (b) where T = Tc & R = 0 and I = maximum value in ranges b-c-d in H-I curve and in ranges b-e-i in H-R curve. V.4 H-T explanation BCS (is a complete microscopic theory of superconductivity by Bardeen & Cooper and Schrieffer) theory can be used in explanation of decreasing resistance until R = zero and T = Tc, temperature decreasing leads to superconductors materials. During that process, magnetism disappearing was recorded, (Meissner effect view) [11], scientist discovered, H on superconductor phase transition was not disappeared, it was hidden, others discovered that more and more of H will return superconductor phase to conductor phase. From above notes, increasing in H due to volume change in SEMAGDAG, at Hc electric coil resistance will be = zero, case of more and more H, the transition phase will back again and so on. 5.3 H-T-I-R relation Figure (7): Change of H and I (superconductor view) Figure (6): Relation between current -resistancetemperature-magnetism Magnetism changing will be playmaker, because H increasing will lead to dual change in resistance and on specific point, coil resistance= zero& current = ∞ (max value) and T = Tc. In Figure 6, R= coil resistance, I = electric current, T = temperature, H = magnetism (mili Henry), T= temperature, Tc = critical temperature, curve a-b-c-d-j represents H-I magnetism with current, curve h-b-e-i-f represents H-R magnetism with resistance; k-b-g curve will be for H-T current with temperature. In period h-b & a-b and k-b, resistance will be decreased during increasing of magnetism; the magnetism increasing will be the reason of decreasing kinetic energy electrons of coil atoms, temperature of coil will be decreased. Another view, increasing magnetism will be a reason of producing different direction magnetic field (anti-magnetism) then more electrons will be free, change in voltage equals double value of normal generator will be used for needed Reference Number: JO-0010 In Figure 7, increasing of H due to volume changes in SEMAGDAG with value = ∆H, will give meaning of more than value of Hc, with more H, net H will be returned to original H of normal generator (this can be considered as a cycle), again with more H and so on …., existence of original H on coil and variable H value of SEMAGDAG at the same time will be seem as hidden[12], where net H will be express the magnetism result values with phase transition on Hc. Current will takes maximum value on front of Hc points on Hc line. V.5 Non linear relation (V-I) Applying Ohm’s law on rotor movement (only), resistance decreasing will be viewed. V = I × r + I × ω× L (16) V = voltage, I = current, r = coil resistance plus load resistance, ω = angular velocity, L = coil inductance. According our results with applying Ohm’s law on rotor and stator case, voltage current relation will be put in Eq. (17). 3 3 × I × r (n ) + × I × 2 × ω × L (17) 2 2 In case of r (load) = 2.3 Ω, r (coil) = 5.1Ω & output voltage = 4.1 volt and output current = 230 m amp & ω × L = 10.42608 Ω, r (new) = 2.95 Ω, resistance (in ohm) will be decreased 2V = 260 The Online Journal on Power and Energy Engineering (OJPEE) below7.4 Ω, It means that non linear relation between V/I in EMAGDAG will be hold and inductance will be increased in non linear graduating. V = I × function (r ) + I × function (ω × L ) (18) In Figure 7, dashed curves will be diagram of same status magnetism change with I & R and T, but with new values from 160 – 280(2 × 10–1 mh) and accompanied by a new T value of Tc new (closest to the 1st one Tc), for Δ H (20 – 140 & 160 – 280 and so on…...), all curves will be repeated with small Tc change. V.6 Sudden change of free stator Sudden change, if stator position changed suddenly to rotor motion (no stator’s motion), it will address results exactly as case No.2, which means that continuous regular change to space leads to gradually output increasing (V,I,P). Sudden change leads to the same values according to time change equals maximum values of change in s where sudden change of space stator means time stator change. There is maximum limit in any of two cases, rotor or stator movement only & rotor and stator motion in velocity gradually increasing or sudden change with a definite angle (volume change) and different types of stator and rotor shapes. VI. CONCLUSION Huge gain of generator's power by above methods will be a concrete of power source, there are many choices for high quality generators production, relative motion between free stator and rotor & sudden change of free stator inside moved rotor & 3 rotated coils in each other . From 200% up to 1100% incredible power gain from original power can be hold. APPENDIX: MAGDA to EFE to Berwald -Moor metric The required relation will be Schwarzschild metric solution of EFE. 1 8πG Rµv − g µv R + g µv Λ = Tµv 2 c4 proved through (1) Rv is Ricci curvature tensor, R is the Scalar curvature, gv is the metric tensor (general relativity), Λ is Cosmological constant, G is Gravitational constant, c is light speed, and Tv is energy- momentum tensor. Figure (1): Space time within tangent space over trajectory path in EFE Reference Number: JO-0010 Vol. (3) – No. (1) In Figure (1), representation of EFE two vectors of (gμν) μ and ν can be represented in form "μ = a(s) and c(t)" & "ν = b(s) and d (t)" same manifold where s = space and t = time Trajectory path will be referred to effect of two vectors (μ & ν) and it will be represented by vector (x) at a specific point on trajectory path on tangent at this point, in EFE (μ & ν) are vectors of one field (gravitational field). Then enquiry, how time part of gravitational field, Eq. (2) will be gained? 1 Rµv − R g µv + = K × Tµv (2) 2 Many solutions of EFE were introduced; Schwarzschild metric which corresponds to gravitational field of an uncharged, non- rotating, spherically symmetric body of mass M. Schwarzschild solution can be in Eq. (3). r dr 2 c 2 dr 2 = 1 − s c 2 dt 2 − − r 2 dθ 2 − r 2 sin 2 θdϕ 2 (3) rs r 1− r Where τ is the proper time (time measured by a clock moving with particle) in seconds, c is light speed in meters per second, t is the time coordinate (by stationary clock at infinity) in seconds, r is the radial coordinate (circumference of a circle centered on the star divided by 2π) in meters, G is gravitational constant, θ is colatitude (angle from North) in radians, φ is longitude in radians, and rs is Schwarzschild radius (in meter) of massive body, which is related to its mass 2GM M by ” rs = ”, geodesic equation will be in Eq. (4). c2 d 2 xµ + Γvµλ dx v dx λ =0 dq dq (4) dq 2 Where Γ represents Christoffel symbol and the variable q parameterizes the particle's path through space-time (called world line). Γ depends only on metric tensor gμν, / rather on how it changes with position. Simplification form will be in Eq. (5). r dr 2 (5) c 2 dr 2 = 1 − s c 2 dt 2 − − r 2 dϕ 2 r r s 1− r Above equations (new) will be considered as a safe hole of GTR to be accommodated with logical and physical channel (induced effect and GTR (general theory of relativity)), Eq.(1) and Eq.(2) were called solutions of EFE will be used through Schwarzschild metric, (other solutions are down to Schwarzschild metric)which corresponds to gravitational field of an uncharged, spherically symmetric non- rotating, body of mass M, Schwarzschild solution will be in Eq. (6). r dr 2 c 2 dr 2 = 1 − s c 2 dt 2 − − r 2 dθ 2 − r 2 sin 2 θdϕ 2 (6) rs r 1− r Above equation in the force approach seems in Eq. (7). V(r ) = K.E + P.E + induction effect (7) Haw? Where V(r) = effective potential & K.E = kinetic energy& P.E = potential energy. 261 The Online Journal on Power and Energy Engineering (OJPEE) V(r ) = − GMm L2 GML2 + + r 2mr 2 C12 mr 2 −GMm = Newtonian gravitational potential energy r L2 = repulsive centrifugal potential energy 2mr 2 GML2 C12 mr 2 energy added system (EM effect = as induced value (body' s motion)) (8) of relativity theory (GTR) [13], by recalling MAGDAFE (em = electromagnetic field) Eq. (1). (9) v2 2 F = A1× 1 − c12 If A2 = 0, then (10) (11) − GMm L2 GML2 + + r 2mr 2 C12 mr 2 V(r ) = 1 dr m 2 dτ 2 1 dr V(r ) = m 2 dτ 2 (12) (13) + GMm L GML V(r ) = − − 2 r 2mr C12 mr 2 + GMm L + GMm v 2 V(r ) = − − × 2 c12 r r 2mr 2 + GMm v 2 2 V(r ) = 1− c12 r 2 2 L2 c1 + 2mr 2 r c1 dτ = 1 − s r 2 2 2GM 2 (19) (21) − r dθ 2 (23 Where r = distance in meter, m, M = mass in kg, L = angular momentum, C1 = C = speed of light and dτ = proper time. Then, induction effect is back bone of physical interpretation Reference Number: JO-0010 (26) (16) (29) Force due to induced field = GM r2 m ( v12 c12 − GM m v12 r 2 m 2 2 2 (30) ) (31) r c1 r m Force due to induced field = − − GML2 F(em ) = C12 mr 4 − GML2 ζ (em ) = C12 mr 3 GM m 2 v12 r 2 c12 − GML2 Energy = ζ (em ) = C12 mr 4 (23) ≡ (5) 2 v12 F = −Gm1 − c12 (22) C12 2 2 dr 2 c1 dt − rs 1 − r G × M × m v 2 2 × 1− c12 r2 Adding induced field F= (15) (20) c12 dτ 2 = c12 dt 2 − dr 2 − r 2 dθ 2 − r 2 sin θ 2 dφ 2 Put θ = zero rs = , then (28) 2 E2 L2 L2 dr 2 rs 2 + rd = 2 2 − c1 + − c1 − r dτ m c1 2mr 2 mr 2 2 (25) (17) 2 rs E2 dr = 2 2 − 1 − d τ r m c1 Force due to induced field = − 2 − L 2mr 2 (24) v12 F = − Gm − Gm c12 E GMm 1 dr 1 L GML m = − mc12 + − + 2 2 2 dτ 2 r 2mr C12 mr 2 2mc1 (18) 2 r2 (27) 2 2 G×M×m 2 + A 2 × 1 − v3 c12 G×M×m F = + induced F(em ) 2 r (14) 2 v2 2 F = A1× 1 − c12 If A1 = So, effective potential = V(r ) = Vol. (3) – No. (1) mr 4 (32) (33) r (34) (35) (36) Recall Eq. (8-23), → Eq. (37), EFE leads to Eq. (5) and MAGDAFE leads to the same equation, EFE contains three parts, Rμν means curvature & gμν means metric tensor & Tμν means energy momentum change or two parts, Gμν means Einstein tensor (s – t distortion due to field existence) &Tμν means energy momentum change in s-t. MAGDAFE (effective potential energy form) contains inverse law 262 The Online Journal on Power and Energy Engineering (OJPEE) (Newtonian gravitational law) & induction effect & change of energy momentum or Lorentz force equation; it means space distortion plus (t) distortion & change of energy momentum. EFE depends on four dimensions (s-t), MAGDA depends on field distortion in (s) with distortion of time of same field (space distortion of dual field), also four dimensions but with physical meaning [14]. r dr 2 c12 dτ 2 = 1 − s c12 dt 2 − r rs 1 − r c12 dτ 2 = ds 2 − r 2 dθ 2 (37) arrow will be for a contact point with a manifold and short green in an opposite direction will be dual field with time, it means that space distortion of a field will be accompanied by a space distortion of a dual field. EFE and Berwald-Moor metric (new view), Berwald-Moor metric can be down to 2 EFE through Finsler geometry, norm vector expresses dual field in MAGDA. Eq. (45) is one form of Berwald-Moor metric. ds4 = dx1 dx2 dx3 dx4 (45) ds 4 = ds 2 ds 2 ds 2 = dx12 + dx 2 2 + dx 3 2 + dx 4 2 If (48) (39) ds 4 = dx14 + dx 2 4 + dx 3 4 + dx 4 4 (zero cross points due to orthogonal) dx 2 = a dx1 & dx 3 = b dx1 and dx 4 = c dx1 (49) ds 4 = dx14 (1 + a 4 + b 4 + c4 ) (50) In general relativity ds = g ab dx a dx b (40) g = g ab dx a ⊗ dx b (41) G ab = K 0 Tab (42) 2 (46) (38) with Cartesian coordinates, dx 2 + dy 2 + dz 2 − c 2 t 2 Vol. (3) – No. (1) 1 R g ab (43) 2 EFE≡ Eq. (5)= Eq. (38), MAGDAFE ≡ effective potential equation ≡ Eq.(43) ≡ EFE, in MAGDA, EFE contains induction effect, and space- time as 4 dimensions, for creation any equation with space - time, it means existence of 2 fields, one and its dual. MAGDA have two fields, one is called gravity field, 2nd is dual of gravity field (electro-magnetic field), dual field is gravity field norm Finally, where 4 dimensions of MAGDA will be detected by adding a space distortion of one field to a time distortion of same field (it will be created by space distortion of dual field of 1st one), Need of dual field will be core of 4 dimensions application [15], impossibility of motion without dual field (velocity of dual field or not) is clear. Dual field can be recognized by actual dual field (s/st/t) or same field with s-t as a package, (EFE has already unification between gravity and electromagnetic fields). G ab = R ab − ds 4 = dx1 dx 2 dx 3 dx 4 If (1 + a 4 (1 + a 4 ) + b4 + c4 abc (47) ) (51) + b4 + c4 = 1 then abc ds 4 = dx1 dx 2 dx 3 dx 4 (52) Other form of Berwald-Moor metric is, total G = ds12 + ds 2 2 (53) From MAGDA ds(total ) = ds12 + ds 2 2 (54) Action ds may be in form,"ds= change in dxi (1dimension)× (invariant or other three dimension homogeneous change)", i = 1..4, invariant or homogeneous change in other three means qualitative. ds 4 = (dx1 dx 2 dx 3 dx 4 ) gij So, ds 4 = dx1 dx 2 dx 3 dx 4 (55) (56) It will be in Finsler geometry, multiplication will be missed (Riemannian geometry), Recalling equations from Eq. (26) to Eq. (44) will be extended. With respect F (due to A1) we have Figure (2): Expressing about dual of a field in space by original one in time In Figure 2, any field can be represented with a long arrow on a tangent space with its 3 (x,y,z) coordinates & the tangent Reference Number: JO-0010 ds12 = dx 2 + dy 2 + dz 2 − c 2 t = G1 (57) With respect F (due to A2) we have ds 2 2 = dx 2 + dy 2 + dz 2 − c 2 t = G 2 (58) 263 The Online Journal on Power and Energy Engineering (OJPEE) Total G of a system = G1 + G2 = G3 G3 = g ij (x, y ) dxi ⊗ dxj + h ab (x, y ) δya ⊗ δyt (59) (60) Berwald-Moor metric (h, ν) can be formed in one of its shapes (2 groups of EFE) [16]. R ab − 1 R g ab = K Tab 2 G ab 1 = K T ab (61) (62) With specific Connection type of Finsler geometry [17], then 1 S ab − S h ab = K R Tab 2 (63) G ab 2 = K T ab (64) The above equations are same as which was gained by MAGDA, then Berwald-Moor metric can be reduced to EFE simultaneously, it equals to MAGDAFE [18]. Figure (3): Diagram gab & hab of Berwald-moor metric In Figure 3, complete diagram of two fields, field with s-t unit and its dual field with st unit where gab can be formulated in EFE and hab can be formulated in orthogonal positionEFE of the 1st. REFERENCES [1] R.Hamza, “Proceedings of XV International Meeting Physical Interpertation of Relativity Theory”, Moscow, BMSTU, ed.M.C. Duffy, V.O.Gladyshev, A.N. Morozov, P. Rowlands, pp. 454- 461 , 2009. [2] R.Hamza, “Finsler Geometry Application Increasing Power from Generators”, OJPEE, Vol. 3,pp. 151-154, 2010. [3] P. Lemmens and P.Millet, “Spin – Orbit – Topology, a Triptych“, Lect.Notes Phys, Vol. 645, pp. 433-477, 2004. Reference Number: JO-0010 Vol. (3) – No. (1) [4] Darrigol, Olivier, “Electrodynamics from André Ampère to Albert Einstein“, England, Oxford University Press, pp. 200, 429–430, 2000. [5] J.R.Hendershot Jr. and Tje Miller, “Design of Brushless Permanent-Magnet Motors“, Magan Physics Publishing and Clarendon Press, 1994. [6] Jack F. Gieras and Mitchell Wing, “Permanent Magnet Motor Technology: Design and Applications“, Marcel Dekker, 2002. [7] Kwang Suk Jung, Sang Heon Lee, “Contact-less revolving stage using transverse flux induction principle“, Precision Engineering, Vol. 32, pp.107-115, 2008. [8] Matthias Vojta, “Spins in superconductors: Mobile or not?“ Nature Physics,Vol.5, pp.623-624,2009. [9] A.D.Sakharov, “Magnetoimplosive generators“, Sov. Phys.Uspekhi , Vol. 9, pp.294-299, 1966. [10] Chang_Ching_Ray, “Magnetostrictive surface anisotropy of epitaxial multilayers“, Phys. Rev., Vol. B 48, pp. 15817–15822, 1993. [11] Jun N agamatsu, Norimasa Nakagawa, Takahiro Muranaka, Yujizenitani, Yuji Zenitani, Jun Akimitsu “Superconductivity at 39k in magnesium diboride“, Nature, Vol. 410(6824), pp.63-64,2001. [12] Tuson Pork, F. Ronning, H.Q. Yuan, M.B. Salamon, J.D. Thompson, "Hidden magnetism and quantum criticality in the heavy fermion superconductors CeRhIn5" Nature,Vol.440, pp. 65-68,2006. [13] Frank_Watson_Dyson, “Philosophical Transactions of the Royal Society A:Physical, Mathematical and Engineering Sciences“, Arthur Eddington, Davidson, C.R., pp.291-333, 1920. [14] D. G. Pavlov, “Four-dimensional time, Hypercomplex numbers in Geometry and Physics“, Russia, Ed. Mozet, pp. 31–39, 2004. [15] Walter, S., “The Genesis of General Relativity“, Vol. 3, Berlin, Springer, pp.193–252, 2007. [16] V. Balan and N. Brinzei, “Einstein equations for the Berwald-Moore type Euclideanlocally Minkowski relativistic model“, BJGA 11, Vol. 3, pp.20–26, 2007. [17] V. Balan and P. C. Stavrinos, “Deviations of geodesics in the fibered Finslerian approach“, vol. 76, pp. 65–74, 1996. [18] R. Miron and M. Anastasiei, Vector Bundles, “Lagrange Spaces. Applications in Relativity Theory“, Romanian, Ed. Acad. Bucharest, 1987. 264